人工晶状体
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种人工晶状体。
背景技术
在眼睛的白内障手术中通常向眼睛的角膜中引入切口,该切口的大小使得可以将套管通过切口引入到眼睛中。在向角膜中引入切口之后,借助于超声乳化术将眼睛的晶状体破碎并且随后从眼睛的囊袋中吸出。之后借助于引入器将人工晶状体插入到囊袋中。人工晶状体具有光学体和接触部,其中借助于接触部将光学体固定在囊袋中。
接触部的任务是将光学体尽可能保持在眼睛中部,以便在眼睛的视网膜上产生尽可能好的成像作用。另外,应将光学体尽可能位置稳定地固定在囊袋中。此外,接触部还有将防止光学体围绕其光轴进行旋转的任务。当光学体为环曲面光学体(应借助于该环曲面光学体来矫正角膜曲率)时这是特别相关的,因为在环曲面光学体在囊袋中以错误定向布置时环曲面光学体导致在视网膜上的成像错误。
在人工晶状体对于囊袋而言过小的情况下,难以将人工晶状体位置稳定地保持在囊袋中。如果人工晶状体对于囊袋而言过大,则存在由于人工晶状体造成囊袋损伤的危险,并且还难以使人工晶状体在囊袋中旋转,以便在环曲面光学体的情况下将其以正确的定向布置在囊袋中。
发明内容
因此本发明的目的是创造一种可以用于解决上述问题的人工晶状体。
根据本发明的第一人工晶状体具有光学体、至少两个接触部以及分别用于这些接触部中的至少两个接触部的组件,该组件具有多条绳索,这些绳索分别紧固在该光学体处以及与该组件相关的接触部处并且具有断开顺序,其中该至少两个接触部中的每一个接触部分别具有压缩状态、部分压缩状态和未压缩状态,其中对于该至少两个接触部中的每一个接触部以及与相应的接触部相关的组件而言成立的是:在该压缩状态下,该断开顺序中的第一绳索被配置为使该接触部在朝向该光学体的方向上变形,由此使得该断开顺序中的第一绳索处于拉伸应力下并且其余的绳索不受应力,并且通过以该断开顺序对这些绳索的相继进行的断开,该接触部能够首先进入部分未压缩状态并且最终能够进入该未压缩状态,在该部分压缩状态下未断开的并且具有断开顺序中的最低序数的绳索被配置为使该接触部在朝向该光学体的方向上变形并因此处于拉伸应力下而其余未断开的绳索不受应力,在该未压缩状态下所有这些绳索都被断开。
根据本发明的第二人工晶状体具有光学体、至少两个接触部以及分别用于这些接触部中的至少两个接触部的组件,该组件具有多个弹簧,这些弹簧分别紧固在该光学体处以及与该组件相关的接触部处并且具有断开顺序,其中该至少两个接触部中的每一个接触部分别具有压缩状态、部分压缩状态和未压缩状态,其中对于该至少两个接触部中的每一个接触部以及与相应的接触部相关的组件而言成立的是:在该压缩状态下,所有这些弹簧都被配置为使该接触部在朝向该光学体的方向上变形,由此使得该断开顺序中的第一弹簧从其静止位置伸长,并且通过以断开顺序对这些弹簧的相继进行的断开,该接触部能够首先进入该部分压缩状态并且最终能够进入该未压缩状态,在该部分压缩状态下所有未断开的弹簧被配置为使该接触部在朝向该光学体的方向上变形,并且未断开的并且具有断开顺序中的最低序数的弹簧从其静止位置伸长,在该未压缩状态下所有这些弹簧都被断开。
根据本发明的第三人工晶状体具有光学体、至少两个接触部以及分别用于这些接触部中的至少两个接触部的组件,该组件具有多个弹簧,这些弹簧分别紧固在该光学体处以及与该组件相关的接触部处,其中该至少两个接触部中的每一个接触部分别具有压缩状态、部分压缩状态和未压缩状态,其中对于该至少两个接触部中的每一个接触部以及与相应的接触部相关的组件而言成立的是:在该压缩状态下所有弹簧都处于压缩的弹簧状态下,并且通过使这些弹簧相继进入未压缩的弹簧状态,该接触部能够首先进入该部分压缩状态并且最终能够进入该未压缩状态,在该部分压缩状态下这些弹簧中的至少一个弹簧处于该压缩的弹簧状态下并且这些弹簧中的至少一个弹簧处于该未压缩的弹簧状态下,在该未压缩状态下所有这些弹簧处于该未压缩状态。
术语“压缩状态”、“部分压缩状态”和“未压缩状态”在此是关于位于囊袋外部且可以不受限制地从压缩状态移动到未压缩状态的人工晶状体。绳索可以分别具有一条纤维或分别具有多条纤维。在根据本发明的第二人工晶状体的情况下,在静止位置中,在弹簧的轴向方向上在弹簧上没有施加力。人工晶状体被设置为,当绳索或弹簧没有断开或者所有弹簧处于压缩的弹簧状态下并且人工晶状体由此处于压缩状态下时,人工晶状体被插入到眼睛的囊袋中。为了插入到囊袋中,将人工晶状体折叠并且在折叠状态下引入到囊袋中,在囊袋中人工晶状体展开。因为在压缩状态下借助于绳索或弹簧使接触部在朝向光学体的方向上变形,所以接触部此时无法在不受控制的情况下展开,由此损伤囊袋的危险较低。另外,人工晶状体仅占据较小的空间并且(即使有)较少借助于接触部紧固在囊袋处。由此可以简单地改变人工晶状体的位置。例如为了将人工晶状体布置在囊袋中部以获得良好的成像作用,这是相关的。此外可以简单地改变人工晶状体的定向。由此,在光学体为环曲面光学体的情况下可以避免成像错误。
对于根据本发明的第一人工晶状体和第二人工晶状体而言,这些绳索或弹簧则可以借助于经由角膜中的小切口被引入到囊袋中的刀子或剪子或者借助于激光来断开,以便使人工晶状体进入部分压缩状态或未压缩状态并且由此变大。为了使人工晶状体尽可能均匀地变大,在所有这些组件的情况下,首先可以将具有相同序号的绳索或弹簧断开,然后将具有下一个更高序号的绳索或弹簧断开。由此可以保证,在绳索或弹簧断开时,人工晶状体尽可能保持布置在囊袋的中部。在根据本发明的第三人工晶状体的情况,这以如下方式进行:使得这些弹簧相继进入未压缩的弹簧状态。另外还可以将人工晶状体的大小对囊袋进行匹配,其方式为不将所有绳索或弹簧断开或者不使所有弹簧进入未压缩的弹簧状态。由此可以降低由于接触部造成囊袋损伤的危险。未断开且具有断开顺序中的最低序号的绳索可以处于拉伸应力下。所有未断开的绳索不受压缩应力。
对于根据本发明的第一人工晶状体而言优选的是,对于这些绳索中的每一条绳索,该绳索在接触部紧固点处紧固在接触部处并且在光学体紧固点处紧固在光学体处,其中接触部紧固点和光学体紧固点处于同一个平面中,该平面的法线与光学体的光轴重合。对于根据本发明的第二人工晶状体而言优选的是,对于这些弹簧中的每一个弹簧,该弹簧在接触部紧固点处紧固在接触部处并且在光学体紧固点处紧固在光学体处,其中接触部紧固点和光学体紧固点处于同一个平面中,该平面的法线与光学体的光轴重合。由此可以避免人工晶状体在压缩状态下或在部分压缩状态下弯曲。
对于根据本发明的第一人工晶状体而言优选的是,这些组件中的每一个组件由这些绳索中的两条绳索组成,或者这些组件中的每一个组件具有这些绳索中的三条绳索或由三条绳索组成,或者这些组件中的每一个组件具有这些绳索中的四条绳索或由四条绳索组成。对于根据本发明的第二人工晶状体而言优选的是,这些组件中的每一个组件由这些绳索中的两个弹簧组成,或者这些组件中的每一个组件具有这些弹簧中的三个弹簧或由三个弹簧组成,或者其中这些组件中的每一个组件具有这些弹簧中的四个弹簧或由四个弹簧组成。
对于根据本发明的第一人工晶状体而言优选的是,对于这些组件中的每一个组件而言成立的是:所有这些绳索具有不同的颜色。对于根据本发明的第二人工晶状体而言优选的是,对于这些组件中的每一个组件而言成立的是:所有这些弹簧具有不同的颜色。操作者可以通过不同的颜色来简单地分辨断开顺序。
根据本发明第一人工晶状体的绳索优选被实施为在该断开顺序中越来越长。由此例如可以将这些组件之一的这些绳索中的所有绳索在相同的接触件紧固点处紧固在接触件处并且在相同的光学体紧固点处紧固在光学体处。由此可以使光学体紧固点的数量最小化。因为这些光学体紧固点中的每一个光学体紧固点都可能影响通过光学体的成像,所以还可以通过使光学体紧固点的数量最小化来使对光学体的成像功能的影响最小化。
对于根据本发明的第二人工晶状体而言优选的是,该至少两个接触部中的每一个接触部具有位于外部的接触部纵向末端,并且对于这些组件中的每一个组件而言成立的是:这些弹簧与位于外部的接触部纵向末端的距离被实施为在该断开顺序中越来越长。由此可以防止这些组件之一的这些弹簧发生接触并且由此互相缠绕。
对于根据本发明的第一人工晶状体而言优选的是,这些绳索被配置为在将人工晶状体插入到眼睛的囊袋中之后分解。对于根据本发明的第二人工晶状体而言优选的是,这些弹簧被配置为在将人工晶状体插入到眼睛的囊袋中之后分解。由此可以实现:没有多余的材料留在囊袋中。
对于根据本发明的第一人工晶状体而言优选的是,这些绳索被配置为在将人工晶状体插入到眼睛的囊袋中之后并且仅在它们被断开之后才分解。对于根据本发明的第二人工晶状体而言优选的是,这些弹簧被配置为在将人工晶状体插入到眼睛的囊袋中之后并且仅在它们被断开之后才分解。由此可以使人工晶状体的大小与囊袋的大小匹配,其方式为仅将必需的那些绳索/弹簧断开并且同时避免将多余的材料留在囊袋中。
对于根据本发明的第三人工晶状体而言优选的是,这些弹簧具有形状记忆材料,使得通过加热该形状记忆材料能够使这些弹簧中的每一个弹簧进入未压缩的弹簧状态。加热例如可以借助于激光进行。
对于根据本发明的第二人工晶状体而言替代地优选的是,该人工晶状体对于这些弹簧中的每一个弹簧分别具有固定装置,该固定装置被配置为将与该固定装置相关的弹簧固定在该压缩的弹簧状态下,其中通过打开该固定装置能够使与该固定装置相关的弹簧进入该未压缩的弹簧状态。该固定装置例如可以具有布置在弹簧的两个纵向末端处的两块板和紧固在这两块板处的固定装置绳索。固定装置的打开可以通过断开固定装置绳索来进行,例如借助于刀子、镊子或激光。
对于所有根据本发明的人工晶状体而言,该至少两个接触部优选为C形或J形。特别优选地,所有接触部为C形或J形。
对于根据本发明的人工晶状体而言优选的是,该人工晶状体具有三个或四个该接触部并且对于这些接触部中的每一个接触部具有这些组件中的一个组件。特别优选地,该人工晶状体具有仅两个、仅三个或仅四个该接触部并且对于这些接触部中的每一个接触部具有这些组件中的一个组件。
对于所有根据本发明的人工晶状体而言,该光学体优选为环曲面光学体。附加地或替代地可设想的是,该光学体为单焦或多焦光学体。另外,附加地或替代地可设想的是,该光学体具有扩展焦深(英文:enhanced depth of focus,EDoF)。
附图说明
下面将借助示意性的附图来详细解说本发明。
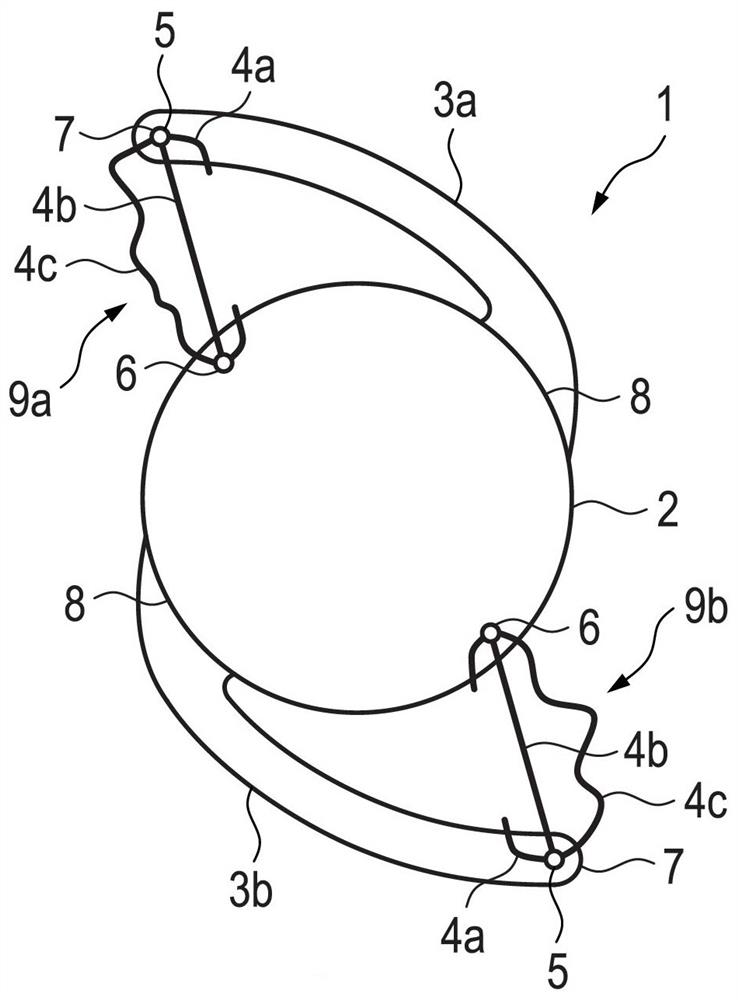
图1示出处于压缩状态下的根据本发明的第一人工晶状体的第一实施方式。
图2示出处于部分压缩状态下的根据本发明的第一人工晶状体的第一实施方式。
图3示出处于部分压缩状态下的根据本发明的第一人工晶状体的第二实施方式。
图4示出处于压缩状态下的根据本发明的第二人工晶状体。
具体实施方式
如从图1至3可以看到的,根据本发明的第一人工晶状体1具有光学体2、至少两个接触部3a、3b以及分别用于这些接触部3a、3b中的至少两个接触部的组件9a、9b,该组件具有多条绳索4a、4b、4c,这些绳索分别紧固在光学体2处以及与组件相关的接触部3a、3b处并且具有断开顺序。该至少两个接触部3a、3b中的每一个接触部分别具有压缩状态、部分压缩状态和未压缩状态。对于该至少两个接触部3a、3b中的每一个接触部以及与相应的接触部3a、3b相关的组件9a、9b而言成立的是:在该压缩状态下,该断开顺序中的第一绳索4a被配置为使接触部3a、3b在朝向光学体2的方向上变形,由此使得断开顺序中的第一绳索4a处于拉伸应力下而其余的绳索4b、4c不受应力,并且通过以该断开顺序对这些绳索4a、4b、4c的相继进行的断开,接触部3a、3b能够首先进入该部分压缩状态并且最终能够进入该未压缩状态,在该部分压缩状态下未断开的并且具有断开顺序中的最低序数的绳索4b被配置为使接触部3a、3b在朝向光学体2的方向上变形并因此处于拉伸应力下而其余未断开的绳索4b、4c不受应力,在该未压缩状态下所有这些绳索4a、4b、4c都被断开。这些接触部3a、3b中的每一个接触部可以具有位于外部的接触部纵向末端7和位于内部的接触部纵向末端8,该位于内部的接触部纵向末端紧固在光学体2处。
图1至图3示出,对于该至少两个接触部3a、3b中的每一个接触部以及与相应的接触部3a相关的组件9a、9b而言可以成立的是:绳索4a、4b、4c在其第一纵向末端处紧固在与绳索4a、4b、4c相关的接触部3a、3b处并且在其第二纵向末端处紧固在光学体2处。图1和图2示出,根据本发明第一人工晶状体1的第一实施方式,该至少两个接触部3a、3b中的每一个接触部可以具有接触部紧固点5并且光学体2对于该至少两个接触部3a、3b中的每一个接触部可以具有光学体紧固点6,其中在这些组件9a、9b中的每一个组件中,绳索4a、4b、4c紧固在与组件9a、9b相关的接触部紧固点5处并且紧固在与组件9a、9b相关的光学体紧固点6处。图3示出,根据本发明第一人工晶状体1的第二实施方式,对于该至少两个接触部3a、3b中的每一个接触部以及与接触部3a、3b相关的组件9a、9b而言可以成立的是:接触部3a、3b对于绳索4a、4b、4c中的每一条绳索具有相应的接触部紧固点5a、5b、5c并且光学体2对于绳索4a、4b、4c中的每一条绳索具有相应的光学体紧固点6a、6b、6c,并且绳索4a、4b、4c中的每一条绳索紧固在接触部紧固点5a、5b、5c中的另一个接触部紧固点处并且紧固在光学体紧固点6a、6b、6c中的另一个光学体紧固点处。
图1示出所有接触部3a、3b的压缩状态,其中可以看到,对于所有接触部3a、3b,第一绳索4a处于拉伸应力下而所有其余绳索4b、4c不受应力。图2示出所有接触部3a、3b的部分压缩状态,其中在图2中所示的部分压缩状态下,对于所有接触部3a、3b而言,第一绳索4a被断开并且所有其余绳索4b、4c未断开。在图2中另外可以辨认出,第二绳索4b处于拉伸压力下并且其余绳索3c未断开且不受应力。
如从图1至图3可以看到的,组件9a、9b中的每一个组件可以由这些绳索中的三条绳索4a、4b、4c组成。替代地可设想的是,这些组件9a、9b中的每一个组件由这些绳索中的两条绳索4a、4b组成,或者这些组件9a、9b中的每一个组件具有这些绳索中的三条绳索4a、4b、4c,或者这些组件9a、9b中的每一个组件具有这些绳索中的四条绳索4a、4b、4c或由四条绳索组成。
可设想的是,对于这些组件9a、9b中的每一个组件而言成立的是:所有这些绳索4a、4b、4c具有不同的颜色。另外,从图1至图3可以看到,绳索4a、4b、4c可以实施为在断开顺序中越来越长。可以设想的是,绳索4a、4b、4c被配置为在将人工晶状体1插入到眼睛的囊袋之后分解。替代地可以设想,绳索4a、4b、4c被配置为在将人工晶状体1插入到眼睛的囊袋中之后并且仅在它们被断开之后才分解。绳索4a、4b、4c可以分别具有一条纤维或分别具有多条纤维。为了避免人工晶状体1在至少一个接触部3a、3b的压缩状态或部分压缩状态下弯曲,对于绳索4a、4b、4c中的每一条绳索可以成立的是:绳索4a、4b、4c在接触部紧固点5、5a、5b、5c处紧固在接触部3a、3b处并且在光学体紧固点6、6a、6b、6c处紧固在光学体2处,其中接触部紧固点5、5a、5b、5c和光学体紧固点6、6a、6b、6c处于同一个平面中,该平面的法线与光学体2的光轴重合。
如从图4可以看到的,根据本发明的第二人工晶状体1具有光学体2、至少两个接触部3a、3b以及分别用于这些接触部3a、3b中的至少两个接触部的组件9a、9b,该组件具有多个弹簧10a、10b、10c,这些弹簧分别紧固在光学体2处以及与组件9a、9b相关的接触部3a、3b处并且具有断开顺序。该至少两个接触部3a、3b中的每一个接触部分别具有压缩状态、部分压缩状态和未压缩状态。对于该至少两个接触部3a、3b中的每一个接触部以及与相应的接触部3a、3b相关的组件9a、9b而言成立的是:在压缩状态下,所有弹簧10a、10b、10c都被配置为使接触部3a、3b在朝向光学体2的方向上变形,由此使得断开顺序中的第一弹簧10a从其静止位置伸长,并且通过以断开顺序对弹簧10a、10b、10c的相继进行的断开,接触部3a、3b能够首先进入部分未压缩状态并且最终能够进入未压缩状态,在部分压缩状态下所有未断开的弹簧10b、10c被配置为使接触部3a、3b在朝向光学体2的方向上变形,并且未断开的并且具有断开顺序中的最低序数的弹簧10b、10c从其静止位置伸长,在未压缩状态下所有弹簧10a、10b、10c都被断开。这些接触部3a、3b中的每一个接触部可以具有位于外部的接触部纵向末端7和位于内部的接触部纵向末端8,该位于内部的接触部纵向末端紧固在光学体2处。在静止位置中,在弹簧10a、10b、10c的轴向方向上在弹簧10a、10b、10c上没有施加力。在图4中,在所有接触部3a、3b中形成了压缩状态。
图4示出,这些组件9a、9b中的每一个组件可以由这些弹簧中的三个弹簧10a、10b、10c组成。替代地可设想的是,这些组件9a、9中的每一个组件由这些弹簧中的两个弹簧10a、10b组成,或者这些组件9a、9b中的每一个组件具有这些弹簧中的三个弹簧10a、10b、10c,或者这些组件9a、9b中的每一个组件具有这些弹簧中的四个弹簧10a、10b、10c或由四个弹簧组成。
对于这些组件9a、9b中的每一个组件而言可以成立的是:所有这些弹簧10a、10b、10c具有不同的颜色。另外从图4可以看到,该至少两个接触部3a、3b中的每一个接触部可以具有位于外部的接触部纵向末端7和位于内部的接触部纵向末端8,并且对于组件9a、9b中的每一个可以成立的是:弹簧10a、10b、10c与位于外部的接触部纵向末端7的距离被实施为在该断开顺序中越来越长。可以设想的是,弹簧10a、10b、10c被配置为在将人工晶状体1插入到眼睛的囊袋之后分解。另外可以设想,弹簧10a、10b、10c被配置为在将人工晶状体1插入到眼睛的囊袋中之后并且仅在它们被断开之后才分解。为了避免人工晶状体1在至少一个接触部3a、3b的压缩状态或部分压缩状态下弯曲,对于弹簧10a、10b、10c中的每一个弹簧可以成立的是:绳索4a、4b、4c在接触部紧固点5、5a、5b、5c处紧固在接触部3a、3b处并且在光学体紧固点6、6a、6b、6c处紧固在光学体2处,其中接触部紧固点5、5a、5b、5c和光学体紧固点6、6a、6b、6c处于同一个平面中,该平面的法线与光学体2的光轴重合。
对于这两种根据本发明的人工晶状体而言,术语“压缩状态”、“部分压缩状态”和“未压缩状态”是关于位于囊袋外部且可以不受限制地从压缩状态移动到未压缩状态的人工晶状体。对于这两种根据本发明的人工晶状体1而言,该至少两个接触部3a、3b可以例如为C形或J形。此外对于这两种根据本发明的人工晶状体1而言可以设想的是,人工晶状体1具有三个或四个接触部3a、3b并且对于接触部3a、3b中的每一个接触部具有组件9a、9b中的一个组件,人工晶状体1尤其具有仅两个、仅三个或仅四个接触部3a、3b并且对于接触部3a、3b中的每一个接触部具有组件9a、9b中的一个组件。另外可以设想的是,光学体2为环曲面光学体。
附图标记清单
1 人工晶状体
2 光学体
3a 第一接触部
3b 第二接触部
4a 第一绳索
4b 第二绳索
4c 第三绳索
5 接触部紧固点
5a 第一接触部紧固点
5b 第二接触部紧固点
5c 第三接触部紧固点
6 光学体紧固点
6a 第一光学体紧固点
6b 第二光学体紧固点
6c 第三光学体紧固点
7 位于外部的接触部纵向末端
8 位于内部的接触部纵向末端
9a 第一组件
9b 第二组件
10a 第一弹簧
10b 第二弹簧
10c 第三弹簧。
- 具有将人工晶状体保持在存储瓶内的穿梭件组件并在注射件组件中可操作地提供人工晶状体的人工晶状体注射件组件
- 人工晶状体制作方法及利用该方法制作的人工晶状体