悬架系统
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种悬架系统,其例如设于四轮汽车等车辆,通过控制压缩空气相对于各车轮的空气悬架的供给/排出来进行车高调整。
背景技术
在专利文献1中公开了一种悬架系统,其通过控制压缩空气相对于设于各车轮的空气悬架的供给/排出来进行车高调整。
现有技术文献
专利文献
专利文献1:日本特开平10-309919号公报
发明内容
发明所要解决的技术问题
在专利文献1所示的那种悬架系统中,例如在作用有偏载荷时,同时开始左后轮的空气悬架的车高调整与右后轮的空气悬架的车高调整,在左后轮的空气悬架的车高调整先结束的情况下,停止供给/排出压缩空气的左后轮(停止轮)的空气悬架的车高有时被继续供给/排出压缩空气的右后轮(供排气轮)的空气悬架的车高变化拉动而发生变化。这种停止轮的空气悬架的从动性车高变化会导致车高调整精度的降低、车高超过目标值的允许范围所引起的振荡(供排气控制阀的开闭动作的偏差)的产生。
用于解决技术问题的手段
本发明的目的在于提高悬架系统的车高调整精度。
本发明的一实施方式的悬架系统的特征在于,具备:至少设于前后任一方的右侧悬架及左侧悬架,其夹装于车身与车轴之间,能够根据工作流体的供给/排出而进行车高调整;供排机构,其将工作流体相对于各所述悬架进行供给/排出;车高检测单元,其检测或推断各所述悬架的车高;其中,在利用所述供排机构进行各悬架的车高调整时,在所述车高检测单元的检测值接近目标车高时,对于所述左右一侧悬架与所述左右另一侧悬架中的先停止的所述一侧悬架的停止车高,考虑停止后的因另一侧的悬架的车高变化而变化的车高来决定该先停止的所述一侧悬架的停止车高。
根据本发明的一实施方式,能够提高悬架系统的车高调整精度。
附图说明
图1是说明本实施方式的车高调整机构的空气压回路图。
图2是用于说明单独进行空气悬架的车高调整的情况下的控制器所执行的处理的图。
图3是用于说明现有悬架系统的控制器所执行的车高调整处理的图。
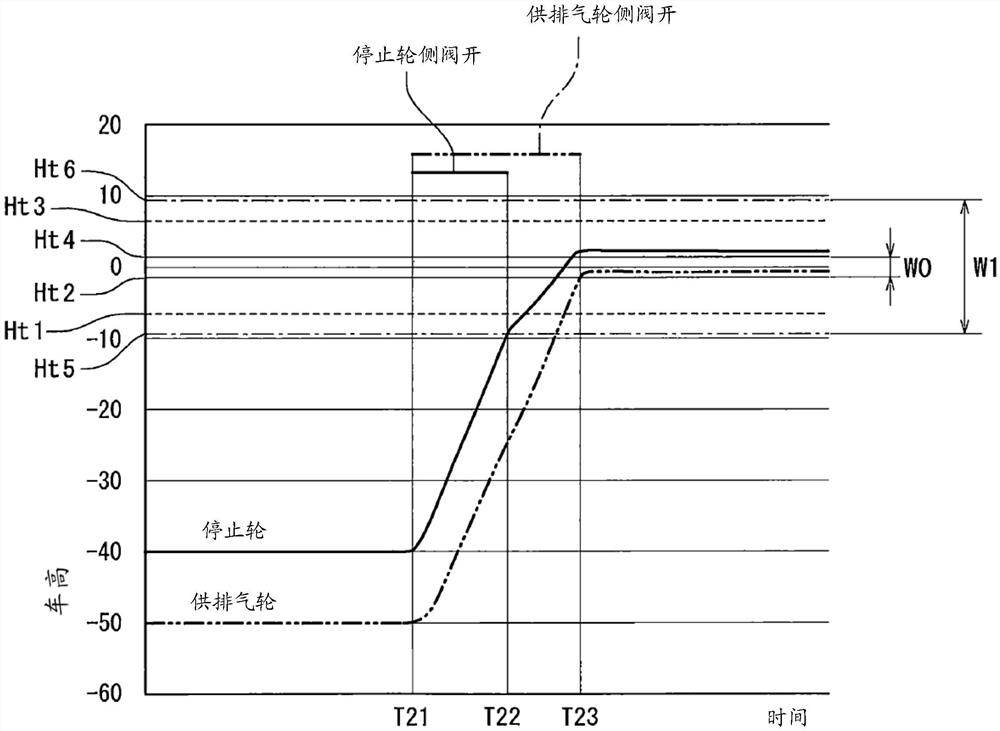
图4是用于说明本实施方式的悬架系统的控制器所执行的车高调整处理的图。
具体实施方式
参照附图对本发明的一实施方式进行说明。
以下,对将本悬架系统1应用于四轮汽车(车辆)的情况进行说明。本悬架系统1对车辆的前后左右轮配备空气悬架,具有对于各空气悬架控制压缩空气的供给/排出(工作流体的供给/排出)的供排气控制阀。这里,本悬架系统1中的车高调整机构的基本构造在车辆的前后是相同的,因此这里对与车辆后侧的左右轮对应的空气悬架进行说明。
参照图1,本悬架系统1具备夹装于车身(省略图示)与左后轮(省略图示)之间的空气悬架11(一侧悬架)、夹装于车身与右后轮(省略图示)之间的空气悬架21(另一侧悬架)和成为向各空气悬架11、21供给的压缩空气的产生源的压缩机2。注意,悬架系统1的空气悬架11、21并不局限于空气悬架,也可以是液压缸。压缩机2具有泵3、驱动该泵3的电动马达4、配置于进气管31的吸滤器5和配置于送气管32的干燥机6。干燥机6吸附从泵3输送的压缩空气的水分,并通过从空气悬架11、21排出的压缩空气的通气而再生。压缩机2为往复、涡旋、直线型等,形式可以是任意的。
空气悬架11、21具有通过压缩空气的供给/排出而伸长/缩短的空气弹簧14、24和伴随着活塞杆15、25的伸缩而产生衰减力的液压缓冲器16、26。空气悬架11、21经由供排气管17、27连接于压缩机2的送气管32。在供排气管17、27上配置有由螺线管12、22驱动的供排气控制阀13、23。在空气悬架11、21上设置有检测车高HL、HR的车高传感器18、28(车高检测单元)。注意,除空气悬架11、21之外的本悬架系统1构成供排机构。
本悬架系统1具有将压缩机2的进气管31与送气管32旁通的旁通管33。旁通管33以跨过压缩机2的泵3的方式设置。在旁通管33上设置有由螺线管34驱动的排气阀35。在本悬架系统1中,通过使排气阀35与供排气控制阀13、23开阀,使得从空气悬架11、21的空气弹簧14、24排出的压缩空气经由干燥机6、旁通管33、进气管31排出到大气中。
本悬架系统1具备由微型计算机等构成的控制器7。在控制器7上,经由线缆连接有电动马达4、供排气控制阀13、23的螺线管12、22、排气阀35的螺线管34以及车高传感器18、28。
这里,参照图2,对单独地对左后轮的空气悬架11进行车高调整时的控制器7所执行的处理进行说明。
控制器7若在时刻T1检测出空气悬架11的车高HL低于供气侧车高调整开始阈值Ht1(HL<Ht1),则使供排气控制阀13开阀而向空气弹簧14供给压缩空气(车高调整开始)。由此,空气弹簧14伸长,空气悬架11的车高HL上升。然后,控制器7若在时刻T2检测出空气悬架11的车高HL到达了供气侧车高调整结束阈值Ht2(HL=Ht2),则使供排气控制阀13闭阀而停止压缩空气向空气弹簧14的供给(车高调整结束)。由此,空气悬架11的车高HL被调整到目标值(HL=0mm)附近。
接下来,为了与本悬架系统1比较,参照图3,对现有悬架系统(1)的控制器(7)所执行的车高调整处理进行说明。
这里,相对于左后轮的空气悬架11,右后轮的空气悬架21被作用较大的载荷,时刻T11的车高调整开始时的右后轮的空气悬架21的车高HR相对于时刻T11的左后轮的空气悬架11较低。注意,参照图3,时刻T11的车高调整开始时的右后轮的空气悬架21的车高HR为-50mm,另一方面,时刻T11的左后轮的空气悬架11的车高HL为-40mm。
控制器若在时刻T11检测出车高HL、HR低于供气侧车高调整开始阈值Ht1,则使供排气控制阀13、23开阀而向空气弹簧14、24供给压缩空气(车高调整开始)。由此,空气弹簧14、24伸长,空气悬架11、21的车高HL、HR上升。
然后,控制器若在时刻T12检测出左后轮的空气悬架11的车高HL到达了供气侧车高调整结束阈值Ht2(HL=Ht2),则使供排气控制阀13闭阀而停止压缩空气向空气弹簧14的供给(车高调整结束)。另一方面,在时刻T12,右后轮的空气悬架21的车高HR尚未到达供气侧车高调整结束阈值Ht2,因此控制器维持供排气控制阀23的开阀状态。由此,右后轮的空气悬架21的车高HR在左后轮的空气悬架11的车高HL停止之后也继续上升。
以下,根据需要,将配置于车辆左右的车轮中的先结束空气悬架的车高调整而停止向空气弹簧供给压缩空气的一侧的车轮称作“停止轮”,将与停止轮相反一侧的车轮、即在停止向停止轮的空气悬架供给压缩空气之后空气悬架继续被供给压缩空气的一侧的车轮称作“供排气轮”。
控制器若在时刻T13检测出右后轮的空气悬架21的车高HR到达了供气侧车高调整结束阈值Ht2(HR=HT2),则使供排气控制阀23闭阀而停止压缩空气向空气弹簧24的供给(车高调整结束)。这里,在现有悬架系统中,在时刻T12到时刻T13的、从左后轮的空气悬架11的车高调整结束到右后轮的空气悬架21的车高调整结束为止的期间、即从停止轮的悬架的车高调整结束到供排气轮的悬架的车高调整结束为止的期间,尽管控制器停止了压缩空气向空气弹簧14的供给,但是左后轮(停止轮)的空气悬架11的车高HL会被右后轮(供排气轮)的空气悬架21的车高HR的上升拉动,从而以大致一定的比例(速度)继续上升。
然后,控制器若检测出左后轮(停止轮)的空气悬架11的车高HL超过了排气侧车高调整开始阈值Ht3(HL>Ht3),则使供排气控制阀13与排气阀35开阀。由此,空气弹簧14的压缩空气向大气中排出,左后轮的空气悬架11的车高HL下降。然后,控制器若检测出左后轮的空气悬架11的车高HL到达了排气侧车高调整结束阈值Ht4(HL=Ht4),则使供排气控制阀13与排气阀35闭阀,结束左后轮的车高调整。
接下来,参照图4,对本悬架系统1的控制器7所执行的车高调整的处理进行说明。
在本悬架系统1中,以停止轮的一侧悬架的车高受到供排气轮的另一侧悬架的车高变化的影响的量、即从动性车高变化量,使停止轮的一侧悬架的车高变化的停止时期提前。
注意,与前述现有悬架系统相同,相对于左后轮(停止轮)的空气悬架11,右后轮(供排气轮)的空气悬架21被作用较大载荷,参照图4,时刻T21的车高调整开始时的右后轮的空气悬架21的车高HR为-50mm,另一方面,时刻T21的左后轮的空气悬架11的车高HL为-40mm。
控制器7若在时刻T21检测出车高HL、HR低于供气侧车高调整开始阈值Ht1,则将从车高传感器18的检测信号获得的左后轮的空气悬架11的车高HL和从车高传感器28的检测信号获得的右后轮的空气悬架21的车高HR进行比较,将到达供气侧车高调整结束阈值Ht2的一侧的车轮识别为停止轮,将相反一侧的车轮识别为供排气轮。
接下来,控制器7基于以下的(式1),计算左后轮(停止轮)的空气悬架11的车高调整结束阈值的校正值Ld。
Ld=|HL-HR|·G(式1)
这里,(式1)中的HL是车高调整开始时的停止轮的悬架(这里是左后轮的空气悬架11)的车高,HR是车高调整开始时的供排气轮的悬架(这里是右后轮的空气悬架21)的车高,|HL-HR|是停止轮的悬架的车高与供排气轮的悬架的车高之间的偏差。
另外,(式1)中的G是停止轮的悬架(这里是左后轮的空气悬架11)的从动性车高变化的车高变化率(车高变化速度)与供排气轮的悬架(这里是右后轮的空气悬架21)的车高变化率(车高变化速度)的比率(以下为“速度比G”)。即,速度比G=(停止轮的从动性车高变化速度)/(供排气轮的车高变化速度)。
注意,并不局限于车高变化率,也可以用空气弹簧14、24的内压的变化率求出。
注意,速度比G按照前后左右的各车轮的每一个基于实测值而求出,例如存储于在控制器7的存储器中储存的查询表。并且,停止轮的悬架(左后轮的空气悬架11)的校正后的车高调整结束幅度W1(幅度的一侧为供气侧车高调整结束阈值Ht5,另一侧为排气侧车高调整结束阈值Ht6)是校正前的标准车高调整结束幅度W0(一侧为供气侧车高调整结束阈值Ht2,另一侧为排气侧车高调整结束阈值Ht4)加上校正值Ld而得的。即,(停止轮的车高调整结束幅度W1)=(标准车高调整结束幅度W0)+(校正值Ld)。
控制器7在通过校正值Ld对左后轮(停止轮)的空气悬架11的车高调整结束幅度进行了校正之后,使供排气控制阀13、23开阀而向空气弹簧14、24供给压缩空气(车高调整开始)。由此,空气弹簧14、24伸长,空气悬架11、21的车高HL、HR上升。注意,右后轮(供排气轮)的空气悬架21的车高调整结束幅度是标准车高调整结束幅度。
控制器7若在时刻T22检测出左后轮(停止轮)的空气悬架11的车高HL到达了校正后供气侧车高调整结束阈值Ht5(HL=Ht5),则使供排气控制阀13闭阀而停止压缩空气向空气弹簧14的供给(停止轮车高调整结束)。另一方面,在时刻T22,右后轮(供排气轮)的空气悬架21的车高HR尚未到达供气侧车高调整结束阈值Ht2,因此控制器7维持供排气控制阀23的开阀状态。由此,右后轮的空气悬架21的车高HR在左后轮的空气悬架11的车高调整结束之后也继续上升。
控制器7若在时刻T23检测出右后轮(供排气轮)的空气悬架21的车高HR到达了供气侧车高调整结束阈值Ht2(HR=HT2),则使供排气控制阀23闭阀而停止压缩空气向空气弹簧24的供给(供排气轮车高调整结束)。由此,右后轮的空气悬架21的车高HR被调整到目标值(HR=0mm)附近。
并且,在本悬架系统中,在时刻T22的停止轮车高调整结束后,左后轮(停止轮)的空气悬架11的车高HL伴随着右后轮(供排气轮)的空气悬架21的车高变化而从动地上升,在时刻T33的供排气轮车高调整结束时,左后轮(停止轮)的空气悬架11的车高HL被调整到目标值(HL=0mm)附近。
如前所述,在现有悬架系统中,在停止轮的悬架的车高调整结束后,停止轮的悬架的车高伴随着供排气轮的悬架的车高变化而从动地变化,导致了车高调整精度降低、振荡(供排气控制阀开闭动作的偏差)的问题。
相比之下,在本悬架系统1中,对于先停止的一侧的停止轮的空气悬架11(一侧悬架)的停止车高(车高调整结束阈值),考虑停止后的因另一侧的供排气轮的空气悬架21(另一侧悬架)的车高变化而变化的车高来决定该先停止的一侧的停止轮的空气悬架11(一侧悬架)的停止车高(车高调整结束阈值),即,考虑车高调整结束后的从动性车高变化来决定该先停止的一侧的停止轮的空气悬架11(一侧悬架)的停止车高(车高调整结束阈值),因此能够在供排气轮的空气悬架21的车高调整结束时将停止轮的空气悬架11的停止车高调整到目标值附近。
该实施方式起到了以下的效果。
根据本实施方式,悬架系统具备:至少设于前后任一方的左右轮上的一侧悬架及另一侧悬架,其夹装于车身与车轴之间,能够根据工作流体的供给/排出而进行车高调整;加压装置,其将工作流体加压;车高检测单元,其检测或推断各悬架的车高;其中,在驱动各悬架而使车高检测单元的检测值接近目标车高时,对于一侧悬架与另一侧悬架中的先停止的一侧的悬架的停止车高,考虑停止后的因另一侧的悬架的车高变化而变化的车高来决定该先停止的一侧的悬架的停止车高,即,考虑伴随着另一侧的悬架的车高变化的从动性车高变化来决定该先停止的一侧的悬架的停止车高,因此能够将先停止的一侧的悬架的停止车高调整到目标车高附近。
由此,能够提高作用了偏载荷时以及不平整地面上的车高调整精度。
另外,即使是铺装路面,一侧悬架与另一侧悬架之间也存在车高差,因此即使在铺装路面上的普通车高调整中,也能够提高车高调整精度。
另外,先停止的一侧的悬架的车高不会由于先停止的一侧的悬架的从动性车高变化而再次超过车高调整开始阈值,因此能够防止在该车高调整开始阈值附近产生振荡。
注意,上述并不限定于实施方式,例如能够以如下方式构成。
在本实施方式中,将用于车高调整的空气压回路设为将从空气弹簧14、24排出的压缩空气向排气中释放的开回路,但也可以设为将从该空气弹簧14、24排出的压缩空气蓄压在储蓄器中的闭回路。
注意,本发明并不限于上述实施方式,包含各种变形例。例如,上述实施方式为了容易理解地说明本发明而详细进行了说明,并不限于必须具备所说明的全部结构。另外,能够将某实施方式的结构的一部分置换为其他实施方式的结构,另外,也能够对某实施方式的结构添加其他实施方式的结构。另外,对于各实施方式的结构的一部分,能够进行其他结构的追加、删除、置换。
本申请基于2018年10月25日申请的日本专利申请第2018-201026号主张优先权。2018年10月25日申请的日本专利申请第2018-201026号的包括说明书、权利要求书、说明书附图以及说明书摘要在内的全部公开内容被通过参照的方式作为一个整体整合到本申请中。
附图标记说明
1悬架系统
2压缩机(加压装置)
11空气悬架(一侧悬架)
18、28车高传感器(车高检测单元)
21空气悬架(另一侧悬架)
- 车辆悬架子系统、悬架安装系统和车辆悬架连接叉组件
- 铸钢前悬架下摆臂、悬架摆臂总成、汽车悬架系统及汽车