一种基于双模融合的涡轮叶片应变场全场测量方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于航空发动机涡轮叶片应变测量与其数据处理领域,用于涡轮叶片全场应变的测量与应变场重构。
背景技术
航空发动机工作过程中的涡轮转子叶片的应变状态是研究发动机涡轮叶片力学性能,评估叶片工作状态,改进叶片结构的关键参数之一。叶片应变的测量与应变场的重构是航空发动机涡轮叶片测试领域的重点和难点,目前采用高温应变片的方法属于接触式点对点的测量方式,存在安装布线困难,难以重构应变场以及应用温度上限低等问题,严重阻碍了高温高压环境下涡轮转子叶片应力应变状态的研究。
针对此难题,本发明提出一种基于光学非接触式测量方式的双模融合的涡轮叶片应变场全场重构方法,采用红外采集与成像技术相结合的方式,分别针对涡轮叶片的边缘与表面区域进行应变测量,并结合叶片表面特征将两种模式的数据进行融合,重构叶片全场应变。
发明内容
本发明的结合成像技术与红外光电测量应变技术,利用同一光路,同一探针的非接触测量,实现同一目标叶片整个应变场的测量与重构,解决目前涡轮转子叶片应变测量数据点少,难以形成场测量的难题。
本发明将两种测量方法融合,具有成像测量模式和红外测量模式,利用一个探针实现数字图像信号和红外信号的同时采集,在上位机系统里集中处理。所述探针具有伸缩和旋转两种功能,所述伸缩功能是指在叶片光学信息采集过程,探针会在发动机机匣上的预留孔内上下运动,在运动过程,探针的通光孔可以径向覆盖叶片多个目标区域。所述旋转功能是指探针伸缩过程前,预先基于所述通光孔与目标叶片的初步相对位置关系进行调整,满足对叶片不同区域的弧形的焦距调节。所述探针成像测量模式,是基于双远心光学系统后端连接电荷耦合器件CCD,所述电荷耦合器CCD工作在发动机机匣外,由于通光孔限制与探针式成像系统的视场限制,成像测量模式的视场角不足以直接记录整个叶片面积,通过所述探针伸缩功能,结合叶片的转速传感器对同一叶片的区域进行多次成像。由于叶片边缘位置难以制作特征点,采用成像方式计算应变精度不高,因此对于叶片边缘位置采用红外模式,在探针伸缩旋转过程,红外模式在不断记录,探针伸缩位移一次,叶片的红外辐射信号通过所述探针传递到后端的红外光电探测器,将转换的电压信号记录。红外辐射信号的采集时基于叶片的旋转,在所述探针到达指定高度位置后,叶片的旋转运动以及叶片与周围环境的红外辐射差异会导致采集的电压信号呈现周期性变化,通过对所述红外辐射差异的精确识别可以确定叶片一个周期信号的宽度,即记录时间的一个差值,结合叶片的稳态旋转,可以计算出叶片轴向的位移变化。
本发明技术方案为一种基于双模融合的涡轮叶片应变场全场测量方法,该方法利用可同时采集光学信息和红外信息的探针对涡轮叶片进行数据采集,该探针可伸缩和旋转,伸缩方向与涡轮径向方向一致;该方法包括如下步骤:
步骤1:将一片涡轮叶片表面划分为若干个矩形区域,预先计算出探针采集每个矩形区域光学信息时的采集角度和伸缩量;
步骤2:常温状态,转动涡轮叶片,根据步骤1预先计算的采集角度和伸缩量,利用探针对同一片涡轮叶片的每个矩形区域进行光学信息采集;
步骤3:对获取的涡轮叶片各个区域的光学信息进行拼接,获得完整的涡轮叶片图像;
步骤4:固定探头的伸缩量,转动涡轮叶片,采集常温状态下涡轮叶片表面的红外信息变化情况,基于光电转换器将红外信号转为连续的电压信号,根据电压信号的突变情况确定涡轮叶片的边缘信息;采用相同的方法,分别获得探头不同伸缩量下的同一涡轮叶片边缘信息;
步骤5:将步骤3得到的涡轮叶片图像和步骤4得到的涡轮叶片边缘信息通过插值法进行融合得到精确涡轮叶片图像;
步骤6:采用步骤1到步骤5的方法获取在不同工作状态下的涡轮叶片图像;
步骤7:计算涡轮叶片全场应变情况;
步骤7.1:将步骤5融合的叶片光学图像依次进行灰度转化、高斯高通滤波、直方图均衡化实现图像的增强处理;
步骤7.2:常温状态下精确涡轮叶片图像作为参考图像,对应特征点(x,y)的灰度值记为f(x,y);工作状态下精确涡轮叶片图像作为目标图像,对应特征点(x',y')的灰度值记为g(x',y');将参考图像划分为多个参考子区域;
步骤7.3:利用相关函数在目标图像中寻找与所有参考子区相似度最高的目标子区域,进一步在目标图像中确定参考图像各特征点的对应特征点;
步骤7.4:根据参考图像到目标图像对应特征点的位置变化情况,计算出工作状态下涡轮叶片的全场应变情况。
进一步的,所述步骤7.3中采用互相关函数使目标子区域与参考子区域互相关函数取极大值,同时在目标图像子区域搜索过程,采用Newton-Rapshon算法结合双三次插值实现亚像素级别的匹配精度;所述步骤7.4中基于目标图像与参考图像的高精度匹配得到全场位移场变化情况,利用局部最小二乘拟合的方法得到全场应变情况。
本发明的有益效果:本发明将数字图像技术与红外光电测量技术结合,在航空发动机恶劣的高温高压环境中不仅实现涡轮转子叶片的应变测量,并且基于数据处理和图片拼接等方法能完成叶片应变场的重构,使计算的计算不同区域特别是边缘区域应变情况更加准确。
附图说明
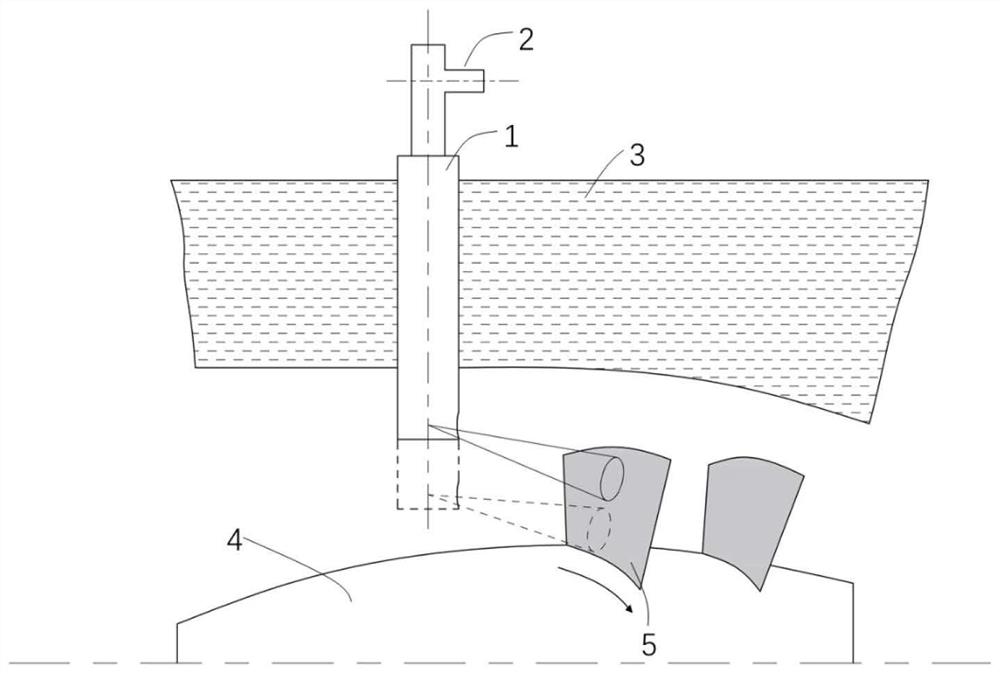
图1为涡轮叶片应变场测量示意图;
图2为探针成像模式应变测量;
图3为探针旋转测量功能;
图4为涡轮叶片区域划分图;
图5为叶片子区域数字图像阵列;
图6为涡轮叶片数字图像的应变测量原理示意图;
图7为探针红外光电模式应变测量;
图8为叶片边缘红外光电信号数据图;
图9为叶片应变场信息数据示意图;
图10为应变场重构示意图;
图中:1.双模式探针;2.双模式光路;3.发动机机匣壁;4.发动机轴;5.涡轮叶片;6.探针伸缩功能;7.成像子区域;8.成像光路;9.叶片子区域;10.探针旋转功能;11.叶片子区域特征图像;12.红外光路;13.红外辐射扫描;14.红外光电扫描信号;15.特征图像应变计算;16.参考子区域;17.目标子区域;18.双模式数据融合;19.应变场重构。
具体实施方法
如图1所示,双模式探针1通过发动机机匣壁3的预留孔进入发动机内部,在所述发动机机匣壁3内部主要包括发动机轴4和涡轮叶片5,所述涡轮叶片5在高温高压的燃气环境下进行高速旋转,从而带动所述发动机轴4的转动,所述双模式探针1会将用于传感的探头放入发动机内部,所述探头通过一个反射镜与通光孔的配合,将叶片的光学信息沿着探针管传递到所述双模式探针1后端的双模式光路2,所述的双模式光路2主要包括成像光路8和红外光路1。
航空发动机涡轮叶片工作在高温高压的极端环境中,但是涡轮叶片在发动机稳态工作过程,由于燃气温度、压强以及发动机整体的稳态,可以认为涡轮叶片也处于一个稳态过程,负载与应变处于动态平衡之中,即在测量过程,涡轮叶片的应变场不会随着转动发生快速变化。如图2所示,在探针基于所述成像光路8进行叶片应变测量,所述成像光路8由双远心光路组成,通过接收所述双模式探针1探头位置反射镜反射的叶片光学信息,在光路后端的电荷耦合器件CCD上成像,成像子区域7为所述双模式探针1在成像视场大小限制的条件下能对叶片局部进行清晰成像的区域,成像有效区域记录为a×c,在探针测量前根据叶片表面形貌与成像视场角的宽度a将叶片均匀划分为n
对于叶片边缘应变的测量,如图7所示,所述双模式探针1在红外模式下主要利用红外光路12,配合所述的探针伸缩功能6,完成目标叶片的红外辐射信号采集。所述双模式探针1中探头位置的反射镜反射叶片光学信息,反射的光学信息通过光路与探针连接处的半反半透镜进行分光,将叶片光学信息同时传入所述红外光路12和所述成像光路8。所述红外光路12主要是利用一组准直透镜与近红外波段的滤光片组成,后端与制冷型光电探测器连接,将叶片红外辐射信号转为电信号输出。红外模式下,叶片红外辐射信息的采集配合着双模式探针1所述的探针伸缩功能6,在探针完成一个d距离的位移进行成像后叶片旋转的第一个周期内,所述红外光路12的光电探测器会开始工作,结合叶片的旋转运动与涡轮叶片的转速传感器,完成目标叶片红外辐射信息的采集与识别。当所述红外光路12接收的光学信息由叶片与叶片的间隙过渡到叶片表面,再由叶片表面过渡到叶间间隙的过程,采集转换的红外光电扫描信号14会因为叶间间隙与叶片表面的温度差异出现一个先上升再下降的趋势。
对于叶片同一高度,在不同温度下采集所述的红外光电扫描信号14,如图8所示,对信号曲线采用统一标准的斜率变化分别计算出不同温度下红外光电扫描信号曲线的拐点,基于信号曲线左右两边拐点的计算识别,结果光电探测器的采样率和涡轮叶片稳态工作下的转速可以进一步计算出涡轮叶片的宽度变化,即轴向方向的位移变化量。同时配合成像过程所述的探针伸缩功能6和探针旋转功能10。
将边缘信息和涡轮叶片图像信息进行融合。
基于数字图像的应变测量原理如图6所示,在参考图像中选取以某个点(x
得到叶片在稳态工作过程表面的位移矢量图,如图9所示。最后基于应变的定义:ε=lim
- 一种基于双模融合的涡轮叶片应变场全场测量方法
- 一种基于双模融合的涡轮叶片应变场全场测量方法