双排轮胎定位方法、胎压监测方法及相关设备
文献发布时间:2023-06-19 11:37:30
技术领域
本发明实施例涉及汽车检测技术系统领域,具体涉及一种双排轮胎定位方法、胎压监测方法及相关设备。
背景技术
目前针对双排轮胎进行自动定位方案一般包括:基于专用胎压工具完成,通过OBD(On-Board Diagnostic,车载自动诊断系统)接口将胎压传感器标识及其位置写入TPMS(Tire Pressure Monitoring System,轮胎压力监测系统)ECU(Electronic ControlUnit,电子控制单元),其问题在于该方法需要专业的维修人员使用工具将胎压传感器标识及位置写入TPMS ECU,操作门槛较高,一般车主难以自行完成定位。
或者是基于低频激励器进行低频定位,在车上安装多个能够激活胎压传感器的低频激励器,在车辆点火启动时,通过指定的低频激励器激活指定轮胎内的传感器,以达到轮胎定位的目的,其问题在于:低频激励器的安装及其布线也因此增加了车厂的制造成本。
综上,现有技术中的双排轮定位方法存在成本较高的问题。
发明内容
鉴于上述问题,本发明实施例提供了一种双排轮胎定位方法、胎压监测方法及相关设备,用于解决现有技术中存在的双排轮胎的定位成本较高的问题。
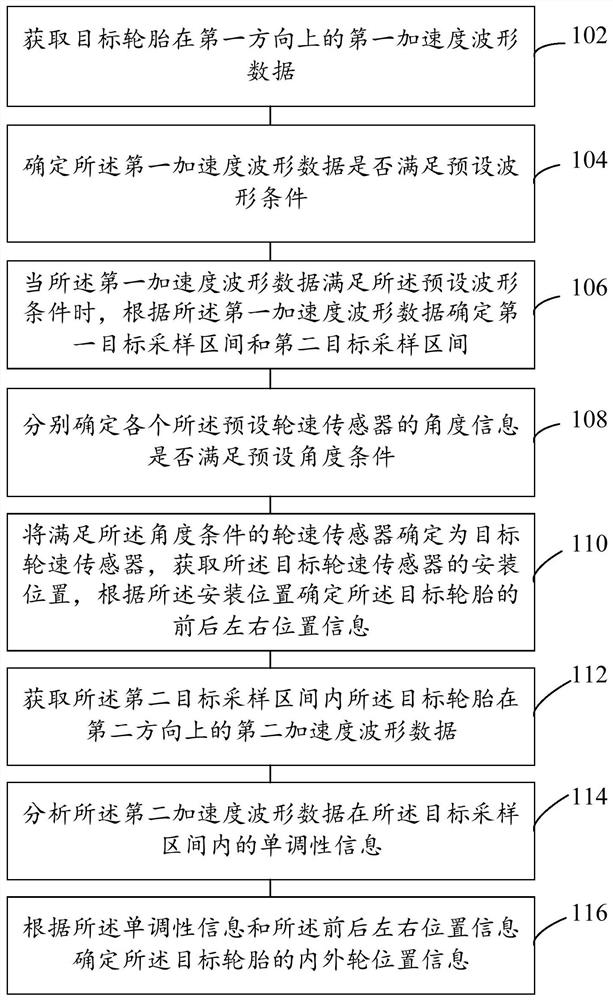
根据本发明实施例的一个方面,提供了一种双排轮胎定位方法,所述方法包括:
获取目标轮胎在第一方向上的第一加速度波形数据;所述第一方向为切向加速度方向或法向加速度方向;
确定所述第一加速度波形数据是否满足预设波形条件;
当所述第一加速度波形数据满足所述预设波形条件时,根据所述第一加速度波形数据确定第一目标采样区间和第二目标采样区间;
获取所述第一目标采样区间内多个预设轮速传感器的角度信息;
分别确定各个所述预设轮速传感器的角度信息是否满足预设角度条件;
将满足所述角度条件的轮速传感器确定为目标轮速传感器,获取所述目标轮速传感器的安装位置,根据所述安装位置确定所述目标轮胎的前后左右位置信息;
获取所述第二目标采样区间内所述目标轮胎在第二方向上的第二加速度波形数据,其中,所述第二方向为法线加速度方向或切向加速度方向;
分析所述第二加速度波形数据在所述目标采样区间内的单调性信息;
根据所述单调性信息和所述前后左右位置信息确定所述目标轮胎的内外轮位置信息。
在一种可选的方式中,所述方法还包括:
确定所述第一加速度波形数据是否满足预设加速度阈值;
当所述第一加速度波形数据满足所述加速度阈值时,确定所述第一加速度波形数据是否呈周期性变化;
当所述第一加速度波形数据呈周期性变化时,确定所述第一加速度波形数据满足所述预设加速度波形条件。
在一种可选的方式中,所述方法还包括:
确定所述第一加速度波形数据的波峰或波谷为周期参考点;
根据所述周期参考点确定所述第一目标采样区间和所述第二目标采样区间。
在一种可选的方式中,所述方法还包括:
确定所述第一加速度波形数据的周期T;
所述第一目标采样区间包括多个距离所述周期参考点PT长度的时间点;P为自然数。
在一种可选的方式中,所述方法还包括:
当所述周期参考点为波峰时,所述第二目标采样区间处于第一参考区间内;所述第一参考区间为自距离所述周期参考点1/4T+MT长度的时间点起至所述周期参考点3/4T+MT长度的时间点之间的区间;M为自然数;
当所述周期参考点为波谷时,所述第二目标采样区间处于第二参考区间内;所述第二参考区间为自距离所述周期参考点3/4T+NT长度的时间点起至所述周期参考点1/4T+(N+1)T长度的时间点之间的区间,N为自然数。
在一种可选的方式中,所述方法还包括:
针对各个所述预设轮速传感器,分别确定第一目标采样区间内各个距离所述周期参考点PT长度的时间点上的采样角度数据;
根据所述采样角度数据计算各个所述轮速传感器在所述第一目标采样区间内的角度变化率;
当所述角度变化率满足预设变化率阈值时,确定所述角度信息满足所述角度条件。
在一种可选的方式中,当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,所述目标轮胎为左后轮时,所述方法还包括:
当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为左后内轮;
当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为左后外轮。
在一种可选的方式中,当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,所述目标轮胎为右后轮时,所述方法还包括:
当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为右后外轮;
当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为右后内轮。
在一种可选的方式中,当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,所述目标轮胎为左后轮时,所述方法还包括:
当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为左后内轮;
当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为左后外轮。
在一种可选的方式中,当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,所述目标轮胎为右后轮时,所述方法还包括:
当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为右后外轮;
当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为右后内轮。
在一种可选的方式中,所述方法还包括:
根据所述第一加速度波形数据确定停车时长;
确定停车时长是否大于预设停车时长阈值;
当所述停车时长大于预设停车时长阈值时,确定所述第一加速度波形数据是否满足所述加速度阈值。
根据本发明实施例的另一方面,提供了一种双排轮胎定位装置,包括:
第一获取模块,用于获取目标轮胎在第一方向上的第一加速度波形数据;所述第一方向为切向加速度方向或法向加速度方向;
第一确定模块,用于确定所述第一加速度波形数据是否满足预设波形条件;
第二确定模块,用于当所述第一加速度波形数据满足所述预设波形条件时,根据所述第一加速度波形数据确定第一目标采样区间和第二目标采样区间;
第二获取模块,用于获取所述第一目标采样区间内多个预设轮速传感器的角度信息;
第三确定模块,用于分别确定各个所述预设轮速传感器的角度信息是否满足预设角度条件;
第四确定模块,用于将满足所述角度条件的轮速传感器确定为目标轮速传感器,获取所述目标轮速传感器的安装位置,根据所述安装位置确定所述目标轮胎的前后左右位置信息;
第三获取模块,用于获取所述第二目标采样区间内所述目标轮胎在第二方向上的第二加速度波形数据,其中,所述第二方向为法线加速度方向或切向加速度方向;
分析模块,用于分析所述第二加速度波形数据在所述目标采样区间内的单调性信息;
第五确定模块,用于根据所述单调性信息和所述前后左右位置信息确定所述目标轮胎的内外轮位置信息。
根据本发明实施例的另一方面,提供了一种胎压监测方法,包括前述任一实施例中的双排轮胎定位方法。
根据本发明实施例的另一方面,提供了一种胎压监测装置,包括前述实施例中的双排轮胎定位装置。
根据本发明实施例的另一方面,提供了一种双排轮胎定位设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行前述任一实施例所述的双排轮胎定位方法的操作。
根据本发明实施例的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一可执行指令,所述可执行指令在双排轮胎定位设备上运行时,使得双排轮胎定位设备执行如前述任意一项实施例所述的双排轮胎定位方法的操作。
本发明实施例通过首先获取目标轮胎在第一方向上的第一加速度波形数据;第一方向为切向加速度方向或法向加速度方向,确定第一加速度波形数据是否满足预设波形条件。然后在第一加速度波形数据满足预设波形条件时,根据第一加速度波形数据确定第一目标采样区间和第二目标采样区间。一方面,获取第一目标采样区间内多个预设轮速传感器的角度信息,然后分别确定各个预设轮速传感器的角度信息是否满足预设角度条件。将满足角度条件的轮速传感器的安装位置确定为目标轮胎的前后左右位置信息。另一方面,获取第二目标采样区间内目标轮胎在第二方向上的第二加速度波形数据,其中,第二方向为法线加速度方向或切向加速度方向;分析第二加速度波形数据在目标采样区间内的单调性信息;最后,根据单调性信息和前后左右位置信息确定目标轮胎的内外轮位置信息。
区别于现有技术中的使用专用工具进行轮胎位置标定,或者安装多个低频触发器进行轮胎定位的方法,本发明实施例通过第一加速度波形数据确定目标轮胎达到预设运动状态的第一目标采样区间和第二目标采样区间,并在第一目标采样区间采集目标轮胎的第二方向的第二加速度波形数据进行单调性的分析,以及在第二目标采样区间采集各个预设轮速传感器的角度变化信息进行分析,最终实现目标轮胎的定位,无需加装额外器件或者专业人员操作,从而能够克服双排轮胎的定位成本较高的问题。
上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
附图仅用于示出实施方式,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
图1示出了本发明实施例提供的双排轮胎定位方法的流程示意图;
图2示出了本发明实施例提供的第一加速度波形数据和第二加速度波形数据的示意图;
图3示出了本发明实施例提供的双排轮胎定位装置的结构示意图;
图4示出了本发明实施例提供的双排轮胎定位设备的结构示意图。
具体实施方式
下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。
图1示出了本发明实施例提供的双排轮胎定位方法的流程图,该方法由基于TPMS(Tire Pressure Monitoring System,轮胎压力监测系统)设备执行。该TPMS设备中包括胎压传感器、轮速传感器、ABS(Anti-lock Braking System,防抱死制动系统)控制模块、通信模块以及处理模块。
其中,胎压传感器安装在双排轮的内轮胎和外轮胎的轮毂或轮辋等预设位置上,用于获取目标轮胎的加速度、胎压等第一传感数据,并将第一传感数据发送至通信模块。每一个轮胎对应一个胎压传感器。
轮速传感器数量为四个,分别安装在目标车辆上,对应于目标车辆的左前双排轮、右前双排轮、左后双排轮以及右后双排轮对应的位置,用于检测目标车辆在上述四个位置的轮胎的齿轮转速、角度信息等第二传感数据,将第二传感数据发送给ABS控制模块。其中,相同的前后左右位置对应的轮胎,如都对应于左后轮位置的左后内轮以及左后外轮对应的第二传感数据是相同的。
ABS控制模块用于接收各个轮速传感器发送的第二传感数据,并将第二传感数据发送至处理模块。
通信模块用于接收胎压传感器发送的第一传感数据,将第一传感数据发送至处理模块。
处理模块用于对第一传感数据和第二传感数据进行处理得到轮胎定位结果,并将轮胎定位结果通过通信模块发送至目标车辆的仪表或者中控。
其中,通信模块可以包括RF(Radio Frequency,射频)接收天线,处理模块可以包括ECU(Electronic Control Unit,电子控制单元),即行车电脑。
如图1所示,该方法包括以下步骤:
步骤102:获取目标轮胎在第一方向上的第一加速度波形数据。
其中,目标轮胎为任意一个双排轮的内轮胎或外轮胎。
本发明实施例中,第一加速度波形数据是通过前述TPMS设备中的胎压传感器实时获取的。其中,胎压传感器随着目标轮胎的转动而转动,在目标车辆行驶时,其受力呈规律性变化。
需要说明的是,目标轮胎上的胎压传感器的安装方向与目标轮胎的位置相关联,如在本发明的一个实施例中,就六轮驱动卡车的后轮而言,其左后轮又包括左后内轮与左后外轮,其右后轮又包括右后内轮与右后外轮,其中,左后内轮与右后外轮上的胎压传感器的气门嘴朝右安装,左后外轮与右后内轮上的胎压传感器的气门嘴朝左安装。即,对于双排轮,其内轮上的胎压传感器的气门嘴的朝向与该轮胎的左右位置相反,其外轮上的胎压传感器的气门嘴的朝向与该轮胎的左右位置方向相同。
本发明实施例中,第一方向可以为切向加速度方向或法向加速度方向。其中,切向加速度受重力与目标车辆的加、减速度影响,法向加速度也叫向心加速度,受重力与目标车辆的行驶速度影响。在目标轮胎转速相同时,法向加速度在胎压传感器运动到目标轮胎的最高点时值最小,在运动到目标轮胎的最低点时值最大,而切向加速度在胎压传感器运动到目标轮胎的左右两端时,其受力与重力方向相同最小,其受力与重力方向相反时最大。
当胎压传感器运动到目标轮胎的最高点或最低点后,经过目标轮胎的四分之一周期的转动,胎压传感器即随之运动到目标轮胎的左端或右端,可知,目标轮胎的法向加速度的变化与切向加速度的变化存在四分之一周期的相位差,并且左右轮的法向加速度和切向加速度的相位上的前后关系是相反的。
在本发明的一个实施例中,第一方向优先选取切向加速度方向,原因在于:一方面,目标车辆在行驶的时候切线加速度变化较小,因此,切向加速度方向上的加速度波形数据噪音比较小,由此可以将切向加速度作为基准进行波形变化的比较,同时在切向加速度方向上寻找周期性变化的起始点会相对方便。另一方面,法向加速度在目标车辆行驶时会比较多抖动,对于滤波算法的要求比较高,否则可能该方向上周期性变化的起始点测量不够准确,影响后续轮胎定位的效率。
步骤104:确定所述第一加速度波形数据是否满足预设波形条件。
其中,在本发明的一个实施例中,预设波形条件可以包括两方面,一方面是加速度值大于一定值,表示目标车辆已经启动,另一方面是加速度波形呈周期性变化,表示目标车辆进入正常行驶阶段。
而当目标车辆进入正常行驶阶段后,一方面,目标轮胎的胎压传感器在切向加速度方向上的加速度波形与在法向加速度方向上的加速度波形存在固定的相位差,由此可以确定目标轮胎上的胎压传感器的气门嘴安装朝向。另一方面,每当目标轮胎转动到预设角度(对应于第一加速度波形数据的特征点,如波峰、波谷),对应安装在目标轮胎的前后左右位置上的轮速传感器所采集到轮胎齿轮角度也是保持不变的,而其他位置上的预设的轮速传感器采集到的轮胎齿轮角度则是不断变化的,因此可以结合上述两方面进行轮胎定位。
在本发明的一个实施例中,步骤104还包括:确定所述第一加速度波形数据是否满足预设加速度阈值。预设加速度阈值是目标车辆从静止到启动时的平均加速度值。当所述第一加速度波形数据满足所述加速度阈值时,确定所述第一加速度波形数据是否呈周期性变化。呈周期性变化具体表现为加速度波形连续出现两个波峰与波谷。其中,波峰的判定可以是在该点以前的加速度都递增,在该点以后的加速度都递减,波谷的判定则可以是在该点以后的加速度都递减,在该点以后的加速度都递增。
具体地,每次采集到波峰时,记录从采样开始到出现波峰的时间,连续两次波峰之间的时间间隔为第一间隔,计算第三个波峰与第二个波峰之间的时间间隔作为第二间隔,当第一间隔与第二间隔趋于相同时,则说明目标车辆已经进行匀速运动状态。与此同时,为了避免采集到过多的噪声信号,影响对波峰及波谷的判断,在本发明的再一个实施例中,还可以根据轮速传感器发回的目标轮胎的齿轮转动频率确定第一加速度波形数据的采样频率,如在目标轮胎的齿轮转动频率为200赫兹时,采样频率可以设置为100赫兹,以此保证不会由于采样过于密集,采集到过多汽车启动时的毛刺干扰信号。当所述第一加速度波形数据呈周期性变化时,确定所述第一加速度波形数据满足所述预设加速度波形条件。
需要说明的是,考虑到在短时间内频繁进行轮胎定位比较耗电,因此,在本发明的再一个实施例中,可以在确定目标车辆停车一段时间以后再次启动时,才重新对目标轮胎进行定位。在本发明的再一个实施例中,在确定所述第一加速度波形数据是否满足所述加速度阈值之前,还可以包括:
根据所述第一加速度波形数据确定停车时长。确定第一加速度波形数据小于预设启动阈值的时长作为停车时长。确定停车时长是否大于预设停车时长阈值。预设停车时长阈值可以是10分钟或15分钟,考虑到在较短时间内一般不会出现轮胎位置的变动,因此无需再次进行轮胎定位。
当所述停车时长大于预设停车时长阈值时,确定所述第一加速度波形数据是否满足所述加速度阈值。只有在目标车辆的停车时间大于预设停车时长阈值时,才再次启动轮胎定位的流程。
步骤106:当所述第一加速度波形数据满足所述预设波形条件时,根据所述第一加速度波形数据确定第一目标采样区间和第二目标采样区间。
一方面,第一加速度波形数据在满足预设波形条件时即呈正弦波变换,根据正弦波的波峰或波谷等特征点可以确定目标轮胎运动到一个预设角度,而此时,与目标轮胎位置对应的轮速传感器所采集到的齿轮角度应该也是特定值,因此,可以采集多次目标轮胎在预设角度时,各个位置上的轮速传感器的角度信息,根据轮速传感器的角度信息的变化情况确定出与目标轮胎对应的轮速传感器,从而根据该轮速传感器的位置确定目标轮胎的前后左右位置。因此,第一目标采样区间中包括了多个目标轮胎转动到预设角度的时间点,如若干个第一加速度波形数据的波峰对应的时间点。
另一方面,根据前述步骤102中对目标轮胎的不同位置在目标车辆行驶的过程中的受力变化的分析,在目标车辆正常行驶时,第一加速度波形数据与第二波形加速度波形数据存在一定的相位关系。因此,在确定第一加速度波形数据满足所述预设波形条件之后,可以确定第一加速度波形数据的特征点(如前述预设角度对应的波峰或波谷)作为周期参考点,根据该周期参考点采集第二方向上的加速度波形数据进行采集。因此,第二目标采样区间对应于第二方向上的加速度波形数据的变化存在特定趋势的采样点。
步骤106还包括:确定所述第一加速度波形数据的波峰或波谷为周期参考点。
参考图2,图2中202是切向加速度上的加速度波形时,204是法向加速度上的加速度波形。其中,A点为一个波峰、B点为一个波谷。
根据所述周期参考点确定所述第一目标采样区间和所述第二目标采样区间。
参考前述目标轮胎在运动到预设角度时,胎压传感器的加速度波形信息与对应位置上的轮速传感器的角度信息的匹配关系,以及目标轮胎在法向加速度与切向加速度上的波形之间相位关系,确定第一目标采样区间的过程包括:确定所述第一加速度波形数据的周期T。
可以将第一加速度波形数据的波峰与波谷之间的间隔时长作为1/2T,据此确定周期T。
第一目标采样区间包括多个距离所述周期参考点PT长度的时间点;P为自然数。
参考图2,当周期参考点为A点时,第一目标采样区间可以是[T0、T3](P分别为0、1),以此类推。为了保证定位的准确性,可以规定第一目标采样区间中包括预设个数的采样点,如必须采集满20个波峰对应的数据。
确定第二目标采样区间的过程包括:
当所述周期参考点为波峰时,所述第二目标采样区间处于第一参考区间内;所述第一参考区间为自距离所述周期参考点1/4T+MT长度的时间点起至所述周期参考点3/4T+MT长度的时间点之间的区间;M为自然数。
当所述周期参考点为波谷时,所述第二目标采样区间处于第二参考区间内;所述第二参考区间为自距离所述周期参考点3/4T+NT长度的时间点起至所述周期参考点1/4T+(N+1)T长度的时间点之间的区间,N为自然数。
参考图2,当周期参考点为A点时,第二目标采样区间可以是[T1,T2](M为0),也可以是[T4,T5](M为1),以此类推。当周期参考点为B点时,第二目标采样区间可以是[T4,T5](N为0),其他情况类似,不再赘述。
步骤108:获取所述第一目标采样区间内多个预设轮速传感器的角度信息。
角度信息包括各个轮速传感器发送的齿轮角度。可以是通过前述设备中的ABS控制模块获取的。
步骤110:分别确定各个所述预设轮速传感器的角度信息是否满足预设角度条件。
结合前述步骤106中所述的,预设角度条件指的是在第一目标采样区间上的每个距离所述周期参考点PT长度的时间点所对应的角度值的变化率都小于预设的变化率阈值。
步骤110还包括:针对各个所述预设轮速传感器,分别确定第一目标采样区间内各个距离所述周期参考点PT长度的时间点上的采样角度数据。
举例说明,假设轮速传感器A、B、C、D在第一目标采样区间(包含10个采样时间点)内对应的采样角度数据分别为:
A:65、69、62、59、63、62、64、67、66、64
B:1、45、98、34、64、96、22、12、78、29
C:121、21、44、54、46、17、87、84、7、89
D:111、64、127、103、45、23、56、47、94、3
根据所述采样角度数据计算各个所述轮速传感器在所述第一目标采样区间内的角度变化率。
角度变化率的计算可以是分别计算各个所述轮速传感器在第一目标采样区间中每两个相邻的采样时间点对应的采样角度数据之间的变化率,然后计算的平均值作为各个所述轮速传感器在所述第一目标采样区间内的角度变化率。
当所述角度变化率满足预设变化率阈值时,确定所述角度信息满足所述角度条件。
在本发明的在一个实施例中,还可以将各个轮速传感器的角度变化率进行横向比较,将角度变化率的绝对值最小的轮速传感器确定为其角度信息满足所述角度条件。
步骤112:将满足所述角度条件的轮速传感器确定为目标轮速传感器,获取所述目标轮速传感器的安装位置,根据所述安装位置确定所述目标轮胎的前后左右位置信息。
如前所述,轮速传感器的安装位置是预设和已知的,因此将目标轮速传感器的安装位置确定为所述目标轮胎的前后左右位置。
步骤114:获取所述第二目标采样区间内所述目标轮胎在第二方向上的第二加速度波形数据,其中,所述第二方向为法线加速度方向或切向加速度方向。
步骤116:分析所述第二加速度波形数据在所述目标采样区间内的单调性信息。
单调性包括单调递增、单调递减或者不具有单调性,其中单调递增是指第二加速度的值随着时间递增。确定单调性的方式可以是计算第二加速度波形数据在目标采样区间内的各个采样点的切线斜率,根据切线斜率来确定,本发明对单调性确定方式不作进一步限制。
步骤118:根据所述单调性信息和所述前后左右位置信息确定所述目标轮胎的内外轮位置信息。
可以根据单调性确定目标轮胎的气门嘴的朝向,再结合目标轮胎的前后左右位置确定目标轮胎的内外轮位置信息。
其中,根据单调性确定目标轮胎的气门嘴的朝向包括如下过程:当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,目标轮胎上的胎压传感器的气门嘴朝右;当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎上的胎压传感器的气门嘴朝左。
当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎上的胎压传感器的气门嘴朝右;当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎上的胎压传感器的气门嘴朝左。
考虑到双排轮中内轮与外轮的气门嘴安装朝向是相反的,并且内轮上的胎压传感器的气门嘴的朝向与该轮胎的左右位置信息相反,外轮上的胎压传感器的气门嘴的朝向与该轮胎的左右位置信息相同。因此,可以结合根据单调性确定出的气门嘴的朝向以及前后左右位置进一步确定出目标轮胎的内外轮信息,由此完成轮胎定位。
需要说明的是,在本发明的再一个实施例中,也可以先根据单调性进行气门嘴朝向的判断,再根据轮速传感器的角度信息进行前后左右位置信息的判断,然后将两者信息进行结合,两者的执行顺序不影响轮胎定位的结果。
具体地,在目标车辆为六轮驱动的实施例中,步骤118还包括:
当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,所述目标轮胎为左后轮时,步骤118进一步包括:当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为左后内轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为左后外轮。
当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,所述目标轮胎为右后轮时,步骤118进一步包括:当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为右后外轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为右后内轮。
当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,所述目标轮胎为左后轮时,步骤118进一步包括:当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为左后内轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为左后外轮。
当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,所述目标轮胎为右后轮时,步骤118进一步包括:当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为右后外轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为右后内轮。
由此可知,图2示出的是第一方向为切向加速度方向,第二方向为法向加速度方向时,目标轮胎为右前轮、右后外轮以及左后内轮中之一时的第一加速度波形数据与第二加速度波形数据的波形变化情况。
在目标轮胎对应的目标轮速传感器为左后轮时,目标轮胎确定为左后内轮。
在本发明的再一个实施例中,还可以针对备胎进行定位,由于备胎装在后备箱,检测不到目标车辆启动时的加速度变化,因此,当目标轮胎的第一加速度波形数据在一定时长内持续为零时,则判定为目标轮胎为备胎。
在通过TPMS设备中的处理模块根据胎压传感器的进行处理,得到左右轮定位信息之后,可以进一步将胎压传感器的标识信息与左右轮定位信息进行绑定,将绑定结果以及胎压传感器进一步,以RF数据帧的形式发送至目标车辆的RF接收装置。
在本发明的再一个实施例中,RF数据帧中具体可以包括以下部分:
RF前导,用于指示数据帧的开始。
同步头,用于指示有效数据的起始位置。
传感器ID,用于唯一指示胎压传感器的身份。
轮胎压力信息:胎压传感器检测到的轮胎压力按照预设规则转换后得到的数据。
轮胎温度信息:胎压传感器检测到的轮胎温度按照预设规则转换后得到的数据。
左右前后轮信息:以胎压传感器的气门嘴的朝向为基准,安装在左前轮、左后外轮以及右后内轮上的胎压传感器发送左轮位置信息,安装在右前轮、右后外轮的胎压传感器发送右轮位置信息,安装在备胎位置的胎压传感器发送无位置信息。
状态字:包含目标车辆实时的运动状态、气压状态等,指示胎压传感器所处的模式,如:停车模式、行驶模式、漏气模式等。
校验字段:通过一定的校验算法根据该校验字段校验数据是否有效,用于数据传输中的纠错。
本发明的再一个实施例中,提供了一种胎压监测方法,所述胎压监测方法包括前述任一实施例所述的轮胎定位方法。
在确定了目标轮胎的内外轮位置之后,获取对应位置的轮胎上安装的胎压传感器发送的胎压、温度等轮胎参数信息,根据轮胎参数信息确定各个轮胎的使用状态进行展示和提醒,使得司机等可以实时了解轮胎的使用情况。
其中,根据轮胎参数信息确定各个轮胎的使用状态可以包括:将目标轮胎的轮胎压力信息与预设压力阈值进行比较,将目标轮胎的轮胎温度信息与预设温度阈值进行比较,判断目标轮胎是否存在危险情况,并且在危险情况下,通过预设的装置进行报警。
本发明的再一个实施例中,提供了一种胎压监测设备,所述胎压监测设备包括前述实施例中的轮胎定位装置。胎压监测设备还包括展示装置、报警装置,可以对各个轮胎的使用状态进行实时展示和及时提醒,使得司机等可以实时了解轮胎的使用情况。
图3示出了本发明实施例提供的双排轮胎定位装置的结构示意图。如图3所示,该装置300包括:第一获取模块302、第一确定模块304、第二确定模块306、第二获取模块308、第三确定模块310、第四确定模块312、第三获取模块314、分析模块316以及第五确定模块318。
其中,第一获取模块302,用于获取目标轮胎在第一方向上的第一加速度波形数据;所述第一方向为切向加速度方向或法向加速度方向;
第一确定模块304,用于确定所述第一加速度波形数据是否满足预设波形条件;
第二确定模块306,用于当所述第一加速度波形数据满足所述预设波形条件时,根据所述第一加速度波形数据确定第一目标采样区间和第二目标采样区间;
第二获取模块308,用于获取所述第一目标采样区间内多个预设轮速传感器的角度信息;
第三确定模块310,用于分别确定各个所述预设轮速传感器的角度信息是否满足预设角度条件;
第四确定模块312,用于将满足所述角度条件的轮速传感器确定为目标轮速传感器,获取所述目标轮速传感器的安装位置,根据所述安装位置确定所述目标轮胎的前后左右位置信息;
第三获取模块314,用于获取所述第二目标采样区间内所述目标轮胎在第二方向上的第二加速度波形数据,其中,所述第二方向为法线加速度方向或切向加速度方向;
分析模块316,用于分析所述第二加速度波形数据在所述目标采样区间内的单调性信息;
第五确定模块318,用于根据所述单调性信息和所述前后左右位置信息确定所述目标轮胎的内外轮位置信息。
在一种可选的方式中,第一确定模块304还用于:确定所述第一加速度波形数据是否满足预设加速度阈值;
当所述第一加速度波形数据满足所述加速度阈值时,确定所述第一加速度波形数据是否呈周期性变化;
当所述第一加速度波形数据呈周期性变化时,确定所述第一加速度波形数据满足所述预设加速度波形条件。
在一种可选的方式中,第二确定模块306还用于:确定所述第一加速度波形数据的波峰或波谷为周期参考点;根据所述周期参考点确定所述第一目标采样区间和所述第二目标采样区间。
在一种可选的方式中,第二确定模块306还用于:确定所述第一加速度波形数据的周期T;所述第一目标采样区间包括多个距离所述周期参考点PT长度的时间点;P为自然数。
在一种可选的方式中,第二确定模块306还用于:
当所述周期参考点为波峰时,所述第二目标采样区间处于第一参考区间内;所述第一参考区间为自距离所述周期参考点1/4T+MT长度的时间点起至所述周期参考点3/4T+MT长度的时间点之间的区间;M为自然数;当所述周期参考点为波谷时,所述第二目标采样区间处于第二参考区间内;所述第二参考区间为自距离所述周期参考点3/4T+NT长度的时间点起至所述周期参考点1/4T+(N+1)T长度的时间点之间的区间,N为自然数。
在一种可选的方式中,第三确定模块310还用于:
针对各个所述预设轮速传感器,分别确定第一目标采样区间内各个距离所述周期参考点PT长度的时间点上的采样角度数据;根据所述采样角度数据计算各个所述轮速传感器在所述第一目标采样区间内的角度变化率;当所述角度变化率满足预设变化率阈值时,确定所述角度信息满足所述角度条件。
在一种可选的方式中,当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,所述目标轮胎为左后轮时,第五确定模块318还用于:
当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为左后内轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为左后外轮。
在一种可选的方式中,当所述第一方向为切线加速度方向,所述第二方向为法线加速度方向时,所述目标轮胎为右后轮时,第五确定模块318还用于:当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为右后外轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为右后内轮。
在一种可选的方式中,当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,所述目标轮胎为左后轮时,第五确定模块318还用于:
当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为左后内轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为左后外轮。
在一种可选的方式中,当所述第一方向为法线加速度方向,所述第二方向为切线加速度方向时,所述目标轮胎为右后轮时,第五确定模块318还用于:当所述第二加速度波形数据在所述第二目标采样区间内单调递增时,确定所述目标轮胎为右后外轮;当所述第二加速度波形数据在所述第二目标采样区间内单调递减时,确定所述目标轮胎为右后内轮。
在一种可选的方式中,第一确定模块304还用于:
根据所述第一加速度波形数据确定停车时长;确定停车时长是否大于预设停车时长阈值;当所述停车时长大于预设停车时长阈值时,确定所述第一加速度波形数据是否满足所述加速度阈值。
本发明实施例提供的双排轮胎定位装置的具体实施过程与前述任一实施例所述的双排轮胎定位方法的实施过程相同,不再赘述。本发明双排轮胎定位装置通过根据第一加速度波形数据确定目标轮胎达到预设运动状态的第一目标采样区间和第二目标采样区间,并在第一目标采样区间采集目标轮胎的第二方向的第二加速度波形数据进行单调性的分析,以及在第二目标采样区间采集各个预设轮速传感器的角度变化信息进行分析,最终实现目标轮胎的定位,无需加装额外器件或者专业人员操作,从而能够克服双排轮胎的定位成本较高的问题。
图4示出了本发明实施例提供的双排轮胎定位设备的结构示意图,本发明具体实施例并不对双排轮胎定位设备的具体实现做限定。
如图4所示,该双排轮胎定位设备可以包括:处理器(processor)402、通信接口(Communications Interface)404、存储器(memory)406、以及通信总线408。
其中:处理器402、通信接口404、以及存储器406通过通信总线408完成相互间的通信。通信接口404,用于与其它设备比如客户端或其它服务器等的网元通信。处理器402,用于执行程序410,具体可以执行上述用于双排轮胎定位方法实施例中的相关步骤。
具体地,程序410可以包括程序代码,该程序代码包括计算机可执行指令。处理器402可能是中央处理器CPU,或者是特定集成电路ASIC(Application Specific IntegratedCircuit),或者是被配置成实施本发明实施例的一个或多个集成电路。双排轮胎定位设备包括的一个或多个处理器,可以是同一类型的处理器,如一个或多个CPU;也可以是不同类型的处理器,如一个或多个CPU以及一个或多个ASIC。存储器406,用于存放程序410。存储器406可能包含高速RAM存储器,也可能还包括非易失性存储器(non-volatile memory),例如至少一个磁盘存储器。
程序410具体可以被处理器402调用使双排轮胎定位设备执行上述任一实施例中的双排轮胎定位方法的操作。
本发明实施例提供的双排轮胎定位设备的具体实施过程与前述任一实施例所述的双排轮胎定位方法的实施过程相同,不再赘述。本发明双排轮胎定位设备通过根据第一加速度波形数据确定目标轮胎达到预设运动状态的第一目标采样区间和第二目标采样区间,并在第一目标采样区间采集目标轮胎的第二方向的第二加速度波形数据进行单调性的分析,以及在第二目标采样区间采集各个预设轮速传感器的角度变化信息进行分析,最终实现目标轮胎的定位,无需加装额外器件或者专业人员操作,从而能够克服双排轮胎的定位成本较高的问题。
本发明实施例提供了一种计算机可读存储介质,所述存储介质存储有至少一可执行指令,该可执行指令在双排轮胎定位设备上运行时,使得所述双排轮胎定位设备执行上述任意方法实施例中的双排轮胎定位方法。
可执行指令具体可以用于使得双排轮胎定位设备执行上述任一实施例中的双排轮胎定位方法的操作。
本发明实施例提供的计算机可读介质的具体实施过程与前述任一实施例所述的双排轮胎定位方法的实施过程相同,不再赘述。本发明的计算机可读介质通过根据第一加速度波形数据确定目标轮胎达到预设运动状态的第一目标采样区间和第二目标采样区间,并在第一目标采样区间采集目标轮胎的第二方向的第二加速度波形数据进行单调性的分析,以及在第二目标采样区间采集各个预设轮速传感器的角度变化信息进行分析,最终实现目标轮胎的定位,无需加装额外器件或者专业人员操作,从而能够克服双排轮胎的定位成本较高的问题。
本发明实施例提供一种双排轮胎定位装置,用于执行上述双排轮胎定位方法。
本发明实施例提供了一种计算机程序,所述计算机程序可被处理器调用使双排轮胎定位设备执行上述任意方法实施例中的双排轮胎定位方法。
本发明实施例提供了一种计算机程序产品,计算机程序产品包括存储在计算机可读存储介质上的计算机程序,计算机程序包括程序指令,当程序指令在计算机上运行时,使得所述计算机执行上述任意方法实施例中的双排轮胎定位方法。
在此提供的算法或显示不与任何特定计算机、虚拟系统或者其它设备固有相关。各种通用系统也可以与基于在此的示教一起使用。根据上面的描述,构造这类系统所要求的结构是显而易见的。此外,本发明实施例也不针对任何特定编程语言。应当明白,可以利用各种编程语言实现在此描述的本发明的内容,并且上面对特定语言所做的描述是为了披露本发明的最佳实施方式。
在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
类似地,应当理解,为了精简本发明并帮助理解各个发明方面中的一个或多个,在上面对本发明的示例性实施例的描述中,本发明实施例的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该公开的方法解释成反映如下意图:即所要求保护的本发明要求比在每个权利要求中所明确记载的特征更多的特征。
本领域技术人员可以理解,可以对实施例中的设备中的模块进行自适应性地改变并且把它们设置在与该实施例不同的一个或多个设备中。可以把实施例中的模块或单元或组件组合成一个模块或单元或组件,以及可以把它们分成多个子模块或子单元或子组件。除了这样的特征和/或过程或者单元中的至少一些是相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的的替代特征来代替。
应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本发明可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。上述实施例中的步骤,除有特殊说明外,不应理解为对执行顺序的限定。
- 双排轮胎定位方法、胎压监测方法及相关设备
- 轮胎压力传感器装置,轮胎压力监测方法以及一套部件