车辆控制装置、车辆以及车辆控制方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及车辆控制装置、车辆以及车辆控制方法,具体而言,涉及自动驾驶车辆的车辆控制技术。
背景技术
在专利文献1中公开了具备主ECU和副ECU的自动驾驶控制装置。专利文献1的自动驾驶控制装置在通过故障检测部检测到任一个ECU的故障时,基于该结果来选择使用主ECU和副ECU中的哪一个的操作量,并基于该操作量来执行自动驾驶控制。
现有技术文献
专利文献
专利文献1:日本特开2017-196965号公报
发明内容
发明所要解决的问题
但是,在专利文献1的构成中,通过对在当前周期中运算出的操作量与在以前的周期中运算出的操作量进行比较来检测ECU的故障,因此当在最初的控制周期的时间点下ECU产生了异常的情况下,无法进行故障的检测。另外,即使是在为了应对由于横风等外部环境的影响而使车辆在非意图的状态下急剧地移动的情况等、而基于ECU的正常动作而产生急剧的操作量的变动的情况下,也会产生通过与以前的操作量的比较而误检测为ECU的故障的情况。
在专利文献1的自动驾驶控制装置中,基于当前周期中的运算与以前的周期中的运算的比较来检测故障,但是例如在尽管已偏离目标轨迹但未输出请求进行驾驶交替的请求信号的故障状态持续的情况下,若运算结果的操作量不产生差异,则无法检测为故障。
本发明提供一种车辆控制技术,能够判定尽管已偏离目标轨迹但未输出请求进行驾驶交替的请求信号这样的异常状态。
用于解决问题的手段
本发明的一个方式所涉及的车辆控制装置具有:轨迹生成机构,其生成车辆的目标轨迹;自动驾驶控制机构,其进行基于由所述轨迹生成机构生成的所述目标轨迹而自动地对所述车辆的转向进行控制的自动驾驶控制;识别机构,其对基于所述自动驾驶控制而行驶的所述车辆的行驶状态进行识别;以及路线偏离判定机构,其在表示所述行驶状态的信息相对于所述目标轨迹的偏离量为第一阈值以上的情况下,输出请求进行驾驶交替的请求信号,其特征在于,
所述车辆控制装置还具备动作监视机构,所述动作监视机构对所述路线偏离判定机构的处理进行监视,
所述动作监视机构在使用表示所述车辆的行驶状态的信息和所述目标轨迹计算出的、表示所述行驶状态的信息相对于该目标轨迹的偏离量为比所述第一阈值大的第二阈值以上、且未输出所述请求信号的状态持续了规定的期间的情况下,判定为所述路线偏离判定机构产生了异常。
本发明的另一方式的车辆的特征在于具备车辆控制装置,
所述车辆控制装置具有:轨迹生成机构,其生成车辆的目标轨迹;自动驾驶控制机构,其进行基于由所述轨迹生成机构生成的所述目标轨迹而自动地对所述车辆的转向进行控制的自动驾驶控制;识别机构,其对基于所述自动驾驶控制而行驶的所述车辆的行驶状态进行识别;以及路线偏离判定机构,其在表示所述行驶状态的信息相对于所述目标轨迹的偏离量为第一阈值以上的情况下,输出请求进行驾驶交替的请求信号,
所述车辆控制装置还具备动作监视机构,所述动作监视机构对所述路线偏离判定机构的处理进行监视,
所述动作监视机构在使用表示所述车辆的行驶状态的信息和所述目标轨迹计算出的、表示所述行驶状态的信息相对于该目标轨迹的偏离量为比所述第一阈值大的第二阈值以上、且未输出所述请求信号的状态持续了规定的期间的情况下,判定为所述路线偏离判定机构产生了异常。
本发明的另一方式的车辆控制方法是具有如下机构的车辆控制装置的车辆控制方法,所述车辆控制装置具有:轨迹生成机构,其生成车辆的目标轨迹;自动驾驶控制机构,其进行基于由所述轨迹生成机构生成的所述目标轨迹而自动地对所述车辆的转向进行控制的自动驾驶控制;识别机构,其对基于所述自动驾驶控制而行驶的所述车辆的行驶状态进行识别;路线偏离判定机构;以及动作监视机构,其特征在于,
所述车辆控制方法具有:
输出步骤,在该输出步骤中,在所述路线偏离判定机构判定为表示所述行驶状态的信息相对于所述目标轨迹的偏离量为第一阈值以上的情况下,输出请求进行驾驶交替的请求信号;以及
监视步骤,在该监视步骤中,所述动作监视机构对所述路线偏离判定机构的处理进行监视,
在所述监视步骤中,在使用表示所述车辆的行驶状态的信息和所述目标轨迹计算出的、表示所述行驶状态的信息相对于该目标轨迹的偏离量为比所述第一阈值大的第二阈值以上、且未输出所述请求信号的状态持续了规定的期间的情况下,判定为所述路线偏离判定机构产生了异常。
发明效果
根据本发明,能够判定尽管已偏离目标轨迹但未输出请求进行驾驶交替的请求信号这样的异常状态。
附图说明
表示本发明的实施方式的附图构成说明书的一部分,并与其记述一起用于对本发明进行说明。
图1是实施方式所涉及的车辆用控制系统的框图。
图2是实施方式所涉及的车辆用控制系统的框图。
图3是实施方式所涉及的车辆用控制系统的框图。
图4是实施方式所涉及的车辆用控制系统的框图。
图5A是表示实施方式所涉及的车辆控制装置的功能构成的框图。
图5B是对实施方式所涉及的车辆控制装置的处理的流程进行说明的图。
图6是对路线偏离判定部以及动作监视部的动作的概要进行说明的图。
图7是对路线偏离判定部以及动作监视部的动作进行说明的图。
图8是对动作监视部的动作例进行说明的图。
附图标记说明
V:车辆(本车辆);20A:自动驾驶ECU(车辆控制装置);21A:环境识别ECU;28A:位置识别ECU;510:轨迹生成部;511:自动驾驶控制部;512:识别部;513:路线偏离判定部;514:第一存储部;520:动作监控部;521:第二存储部。
具体实施方式
以下,参照附图对本发明的实施方式进行详细说明。此外,以下的实施方式并非对权利要求书所涉及的本发明进行限定,另外,在本实施方式中说明的特征的组合未必全部都是本发明所必须的。
图1~图4是本发明的一个实施方式所涉及的车辆用控制系统1的框图。控制系统1对车辆V进行控制。在图1以及图2中,由俯视图和侧视图示出了车辆V的概略。作为一个例子,车辆V是轿车型的四轮乘用车。控制系统1包括控制装置1A和控制装置1B。图1是表示控制装置1A的框图,图2是表示控制装置1B的框图。图3主要表示控制装置1A与控制装置1B之间的通信线路及电源的构成。
控制装置1A和控制装置1B是将车辆V所实现的一部分的功能多重化或冗余化的装置。由此,能够提高系统的可靠性。控制装置1A例如除了进行自动驾驶控制、手动驾驶中的通常的动作控制之外,还进行与紧急躲避等相关的行驶辅助控制。控制装置1B主要负责与紧急躲避等相关的行驶辅助控制。有时将行驶辅助称为驾驶辅助。通过利用控制装置1A和控制装置1B使功能冗余化,并且进行不同的控制处理,能够实现控制处理的分散化,并且提高可靠性。
本实施方式的车辆V是并联方式的混合动力车辆,在图2中示意性地图示了输出使车辆V的驱动轮旋转的驱动力的动力装置50的构成。动力装置50具有内燃机EG、马达M以及自动变速器TM。马达M能够用作使车辆V加速的驱动源,并且在减速时等还能够用作发电机(再生制动)。
<控制装置1A>
参照图1对控制装置1A的构成进行说明。控制装置1A包括ECU组(控制单元组)2A。ECU组2A包括多个ECU20A~ECU29A。各ECU包括以CPU为代表的处理器、半导体存储器等存储设备、与外部设备的接口等。在存储设备中存储处理器所执行的程序、处理器在处理中使用的数据等。各ECU也可以具备多个处理器、存储设备以及接口等。此外,关于ECU的数量、所负责的功能,可以适当地进行设计,也可以比本实施方式更细化或者整合。此外,在图1以及图3中,标注了ECU20A~ECU29A的代表性的功能的名称。例如,在ECU20A中记载为“自动驾驶ECU”。
ECU20A作为车辆V的行驶控制而执行与自动驾驶相关的控制。在自动驾驶中,不依赖于驾驶员的驾驶操作而自动地进行车辆V的驱动(基于动力装置50的车辆V的加速等)、转向或制动中的至少一项。在本实施方式中,自动地进行驱动、转向以及制动。
ECU21A是基于对车辆V的周围状况进行检测的检测单元31A、32A的检测结果来识别车辆V的行驶环境的环境识别单元。ECU21A生成后述的目标物数据作为周边环境信息。
在本实施方式的情况下,检测单元31A是通过拍摄来检测车辆V的周围的物体的拍摄设备(以下,有时表述为摄像机31A。)。摄像机31A以能够对车辆V的前方进行拍摄的方式设置于车辆V的车顶前部。通过对摄像机31A所拍摄的图像进行分析,能够提取出目标物的轮廓、道路上的车道的划分线(白线等)。
在本实施方式的情况下,检测单元32A是通过光来检测车辆V的周围的物体的光学雷达(Light Detection and Ranging)(以下,有时表述为光学雷达32A),对车辆V的周围的目标物进行检测、或者对与目标物的距离进行测距。在本实施方式的情况下,设置有五个光学雷达32A,在车辆V的前部的各角部各设置有一个,在后部中央设置有一个,在后部各侧方各设置有一个。光学雷达32A的数量、配置可以适当地进行选择。
ECU29A是基于检测单元31A的检测结果,作为车辆V的行驶控制而执行与行驶辅助(换言之驾驶辅助)相关的控制的行驶辅助单元。
ECU22A是对电动动力转向装置41A进行控制的转向控制单元。电动动力转向装置41A包括根据驾驶员对方向盘ST的驾驶操作(转向操作)使前轮转向的机构。电动动力转向装置41A包括发挥用于辅助转向操作或者使前轮自动转向的驱动力的马达、对马达的旋转量进行检测的传感器、对驾驶员所负担的转向转矩进行检测的转矩传感器等。
ECU23A是对液压装置42A进行控制的制动控制单元。液压装置42A例如实现ESB(电动伺服制动器)。驾驶员对制动踏板BP的制动操作在制动主缸BM中被转换为液压并传递至液压装置42A。液压装置42A是能够基于从制动主缸BM传递来的液压而对向分别设置于四个轮的制动装置(例如盘式制动装置)51供给的工作油的液压进行控制的致动器,ECU23A进行液压装置42A所具备的电磁阀等的驱动控制。在本实施方式的情况下,ECU23A以及液压装置42A构成电动伺服制动器,ECU23A例如对四个制动装置51所施加的制动力和马达M的再生制动所施加的制动力的分配进行控制。
ECU24A是对设置于自动变速器TM的电动驻车锁止装置50a进行控制的停止维持控制单元。电动驻车锁止装置50a主要具备在选择P挡(驻车挡)时将自动变速器TM的内部机构锁止的机构。ECU24A能够对基于电动驻车锁止装置50a的锁止以及锁止解除进行控制。
ECU25A是对向车内报告信息的信息输出装置43A进行控制的车内报告控制单元。信息输出装置43A例如包括平视显示器等显示装置、声音输出装置。进一步地,也可以包括振动装置。ECU25A例如使信息输出装置43A输出车速、外部气温等各种信息、路线引导等信息。
ECU26A是对向车外报告信息的信息输出装置44A进行控制的车外报告控制单元。在本实施方式的情况下,信息输出装置44A是方向指示器(危险警示灯),ECU26A通过作为方向指示器而进行信息输出装置44A的闪烁控制,由此对车外报告车辆V的行进方向,另外,通过作为危险警示灯而进行信息输出装置44A的闪烁控制,由此能够提高车外对车辆V的注意力。
ECU27A是对动力装置50进行控制的驱动控制单元。在本实施方式中,对动力装置50分配一个ECU27A,但也可以对内燃机EG、马达M以及自动变速器TM分别各分配一个ECU。ECU27A例如与由设置于油门踏板AP的操作检测传感器34a、设置于制动踏板BP的操作检测传感器34b所检测到的驾驶员的驾驶操作、车速等对应地,对内燃机EG、马达M的输出进行控制,或者切换自动变速器TM的变速挡。此外,在自动变速器TM中,作为对车辆V的行驶状态进行检测的传感器,设置有对自动变速器TM的输出轴的转速进行检测的转速传感器39。车辆V的车速能够根据转速传感器39的检测结果来进行运算。
ECU28A是对车辆V的当前位置、行进路线进行识别的位置识别单元。ECU28A进行对陀螺仪传感器33A、GPS传感器28b、通信装置28c的控制以及检测结果或者通信结果的信息处理。陀螺仪传感器33A对车辆V的旋转运动进行检测。能够根据陀螺仪传感器33A的检测结果等来判定车辆V的行进路线。GPS传感器28b对车辆V的当前位置进行检测。通信装置28c与提供地图信息、交通信息的服务器进行无线通信,并获取这些信息。在数据库28a中能够存储高精度的地图信息,ECU28A能够基于该地图信息等更高精度地确定车道上的车辆V的位置。
输入装置45A以能够供驾驶员进行操作的方式配置于车内,接受来自驾驶员的指示、信息的输入。
<控制装置1B>
参照图2对控制装置1B的构成进行说明。控制装置1B包括ECU组(控制单元组)2B。ECU组2B包括多个ECU21B~ECU25B。各ECU包括以CPU为代表的处理器、半导体存储器等存储设备、与外部设备的接口等。在存储设备中存储处理器所执行的程序、处理器在处理中使用的数据等。各ECU也可以具备多个处理器、存储设备以及接口等。此外,关于ECU的数量、所负责的功能,可以适当地进行设计,也可以比本实施方式更细化或者整合。此外,与ECU组2A同样地,在图2以及图3中标注了ECU21B~ECU25B的代表性的功能的名称。
ECU21B是基于对车辆V的周围状况进行检测的检测单元31B、检测单元32B的检测结果来识别车辆V的行驶环境的环境识别单元,并且是作为车辆V的行驶控制而执行与行驶辅助(换言之驾驶辅助)相关的控制的行驶辅助单元。ECU21B生成后述的目标物数据作为周边环境信息。
此外,在本实施方式中,ECU21B构成为具有环境识别功能和行驶辅助功能,但也可以如控制装置1A的ECU21A和ECU29A那样,按每个功能来设置ECU。反之,在控制装置1A中,也可以构成为如ECU21B那样由一个ECU实现ECU21A和ECU29A的功能。
在本实施方式的情况下,检测单元31B是通过拍摄来检测车辆V的周围的物体的拍摄设备(以下,有时表述为摄像机31B。)。摄像机31B以能够对车辆V的前方进行拍摄的方式设置于车辆V的车顶前部。通过对摄像机31B所拍摄的图像进行分析,能够提取出目标物的轮廓、道路上的车道的划分线(白线等)。在本实施方式的情况下,检测单元32B是通过电波来检测车辆V的周围的物体的毫米波雷达(以下,有时表述为雷达32B),对车辆V的周围的目标物进行检测、或者对与目标物的距离进行测距。在本实施方式的情况下,设置有五个雷达32B,在车辆V的前部中央设置有一个,在前部各角部各设置有一个,在后部各角部各设置有一个。雷达32B的数量、配置可以适当地进行选择。
ECU22B是对电动动力转向装置41B进行控制的转向控制单元。电动动力转向装置41B包括根据驾驶员对方向盘ST的驾驶操作(转向操作)使前轮转向的机构。电动动力转向装置41B包括发挥用于辅助转向操作或者使前轮自动转向的驱动力的马达、对马达的旋转量进行检测的传感器、对驾驶员所负担的转向转矩进行检测的转矩传感器等。另外,在ECU22B经由后述的通信线路L2电连接有转向角传感器37,能够基于转向角传感器37的检测结果对电动动力转向装置41B进行控制。ECU22B能够获取对驾驶员是否把持着方向盘ST进行检测的传感器36的检测结果,能够对驾驶员的把持状态进行监视。
ECU23B是对液压装置42B进行控制的制动控制单元。液压装置42B例如实现VSA(Vehicle Stability Assist)。驾驶员对制动踏板BP的制动操作在制动主缸BM中被转换为液压并传递至液压装置42B。液压装置42B是能够基于从制动主缸BM传递来的液压而对向各车轮的制动装置51供给的工作油的液压进行控制的致动器,ECU23B进行液压装置42B所具备的电磁阀等的驱动控制。
在本实施方式的情况下,在ECU23B以及液压装置42B电连接有分别设置于四个轮的车轮速度传感器38、偏航率传感器33B、对制动主缸BM内的压力进行检测的压力传感器35,基于这些传感器的检测结果,来实现ABS功能、牵引力控制以及车辆V的姿态控制功能。例如,ECU23B基于分别设置于四个轮的车轮速度传感器38的检测结果,对各车轮的制动力进行调整,从而抑制各车轮的滑行。另外,基于偏航率传感器33B所检测到的车辆V的绕铅垂轴的旋转角速度,对各车轮的制动力进行调整,从而抑制车辆V的急剧的姿态变化。
另外,ECU23B也作为对向车外报告信息的信息输出装置43B进行控制的车外报告控制单元而发挥功能。在本实施方式的情况下,信息输出装置43B是刹车灯,在制动时等ECU23B能够将刹车灯点亮。由此,能够使后续车辆提高对车辆V的注意力。
ECU24B是对设置于后轮的电动驻车制动装置(例如鼓式制动器)52进行控制的停止维持控制单元。电动驻车制动装置52具备将后轮锁止的机构。ECU24B能够对电动驻车制动装置52所进行的后轮的锁止以及锁止解除进行控制。
ECU25B是对向车内报告信息的信息输出装置44B进行控制的车内报告控制单元。在本实施方式的情况下,信息输出装置44B包括配置于仪表盘的显示装置。ECU25B能够使信息输出装置44B输出车速、油耗等各种信息。
输入装置45B以能够供驾驶员进行操作的方式配置于车内,接受来自驾驶员的指示、信息的输入。
<通信线路>
参照图3,对将ECU之间连接为能够进行通信的、控制系统1的通信线路的例子进行说明。控制系统1包括有线的通信线路L1~通信线路L7。在通信线路L1连接有控制装置1A的各ECU20A~ECU27A、29A。此外,ECU28A也可以与通信线路L1连接。
在通信线路L2连接有控制装置1B的各ECU21B~ECU25B。另外,控制装置1A的ECU20A也与通信线路L2连接。通信线路L3将ECU20A和ECU21B连接。通信线路L4将ECU20A以及ECU21A连接。通信线路L5将ECU20A、ECU21A以及ECU28A连接。通信线路L6将ECU29A和ECU21A连接。通信线路L7将ECU29A和ECU20A连接。
通信线路L1~通信线路L7的协议可以相同也可以不同,可以根据通信速度、通信量、耐久性等通信环境而不同。例如,通信线路L3以及通信线路L4在通信速度方面可以是以太网(注册商标)。例如,通信线路L1、L2、L5~L7可以是CAN。
控制装置1A具备网关GW。网关GW对通信线路L1和通信线路L2进行中继。因此,例如,ECU21B能够经由通信线路L2、网关GW以及通信线路L1向ECU27A输出控制指令。
<电源>
参照图3,对控制系统1的电源进行说明。控制系统1包括大容量电池6、电源7A和电源7B。大容量电池6是马达M的驱动用电池,并且是由马达M进行充电的电池。
电源7A是向控制装置1A供给电力的电源,包括电源电路71A和电池72A。电源电路71A是将大容量电池6的电力供给至控制装置1A的电路,例如,将大容量电池6的输出电压(例如190V)降压至基准电压(例如12V)。电池72A例如是12V的铅电池。通过设置电池72A,即使在大容量电池6、电源电路71A的电力供给切断或降低的情况下,也能够向控制装置1A进行电力的供给。
电源7B是向控制装置1B供给电力的电源,包括电源电路71B和电池72B。电源电路71B是与电源电路71A同样的电路,是将大容量电池6的电力向控制装置1B供给的电路。电池72B是与电池72A同样的电池,例如是12V的铅电池。通过设置电池72B,即使在大容量电池6、电源电路71B的电力供给切断或降低的情况下,也能够向控制装置1B进行电力的供给。
<整体构成>
参照图4,从其他观点对车辆V的整体构成进行说明。车辆V包括控制装置1A、控制装置1B、外部识别装置组82以及致动器组83。
外部识别装置组82是搭载于车辆V的外部识别装置(传感器)的集合。外部识别装置组82包括上述的摄像机31A、摄像机31B、光学雷达32A以及雷达32B。摄像机31A以及光学雷达32A经由ECU21A与ECU20A连接。由摄像机31A以及光学雷达32A得到的外部信息、与这些装置相关的诊断信息被供给至ECU20A,摄像机31A以及光学雷达32A按照来自ECU20A的指示进行动作。摄像机31B以及雷达32B与ECU21B连接。由摄像机31B以及雷达32B得到的外部信息、与这些装置相关的诊断信息被供给至ECU21B,摄像机31B以及雷达32B按照来自ECU21B的指示进行动作。ECU21B可以将由摄像机31B以及雷达32B得到的外部信息供给至ECU20A。由此,ECU20A能够使用从摄像机31A、摄像机31B、光学雷达32A以及雷达32B分别得到的外部信息来执行自动驾驶的控制。
致动器组83是搭载于车辆V的致动器的集合。致动器组83包括上述的电动动力转向装置41A、电动动力转向装置41B、液压装置42A、液压装置42B以及动力装置50。电动动力转向装置41A、液压装置42A以及动力装置50经由ECU22A、ECU23A以及ECU27A与ECU20A连接。取而代之地,ECU20A也可以仅与电动动力转向装置41A、液压装置42A以及动力装置50中的一部分连接。与电动动力转向装置41A、液压装置42A以及动力装置50相关的诊断信息被供给至ECU20A,电动动力转向装置41A、液压装置42A以及动力装置50按照来自ECU20A的指示进行动作。电动动力转向装置41B以及液压装置42B与ECU22B连接并且经由ECU22B与ECU21B连接。取而代之地,ECU21B也可以仅与电动动力转向装置41B以及液压装置42B的一部分连接。与电动动力转向装置41B以及液压装置42B相关的诊断信息被供给至ECU21B,电动动力转向装置41B以及液压装置42B按照来自ECU21B的指示进行动作。
动力装置50进行车辆V的驱动,因此是纵向控制致动器的一种。进一步地,动力装置50能够通过变更左右车轮的驱动力的分配来变更车辆V的方向,因此也是横向控制致动器的一种。液压装置42A以及液压装置42B分别进行车辆V的制动,因此是纵向控制致动器的一种。进一步地,液压装置42A以及液压装置42B分别能够通过制动转矩矢量(brake torquevectoring)来变更车辆V的方向,因此也是横向控制致动器的一种。电动动力转向装置41A以及电动动力转向装置41B分别对车辆V的转向进行控制,因此是横向控制致动器的一种。
ECU20A通过通信线路与外部识别装置组82的一部分(摄像机31A以及光学雷达32A)进行通信,并通过另一通信线路与致动器组83的一部分(电动动力转向装置41A、液压装置42A、动力装置50)进行通信。ECU21B通过通信线路与外部识别装置组82的一部分(摄像机31B以及雷达32B)进行通信,通过另一通信线路与致动器组83的一部分(电动动力转向装置41B、液压装置42B)进行通信。与ECU20A连接的通信线路和与ECU21B连接的通信线路可以互不相同。这些通信线路例如是CAN(控制器区域网络),也可以是以太网(注册商标)。另外,ECU20A和ECU21B通过通信线路互相连接。该通信线路例如是CAN(控制器区域网络),也可以是以太网(注册商标)。另外,也可以通过CAN和以太网(注册商标)这两者进行连接。
ECU20A包括高性能处理装置80A和高可靠性处理装置81A。高性能处理装置80A和高可靠性处理装置81A分别由CPU等处理器和RAM等存储器构成。高性能处理装置80A的处理性能比高可靠性处理装置81A的处理性能高。处理装置的性能例如根据时钟数、基准测试(Benchmark)的测试结果来进行比较。高可靠性处理装置81A的可靠性比高性能处理装置80A的可靠性高。例如,在处理装置的故障发生率的评价标准中,高可靠性处理装置81A具有比高性能处理装置80A高的可靠性。
高性能处理装置80A从外部识别装置组82接受输入(例如,外部信息、诊断信息),并基于该输入,生成在自动驾驶中车辆V应该采取的轨迹,并将该轨迹供给至高可靠性处理装置81A。高可靠性处理装置81A决定用于实现该轨迹的各致动器的操作量,生成对致动器组83的指示,并供给至对各致动器进行控制的ECU。
高可靠性处理装置81A也作为对与外部识别装置组82的通信线路的通信状况以及与致动器组83的通信线路的通信状况进行监视的监视部而发挥功能。通信状况包括连接对象的装置的自我诊断的结果、无法与连接对象的装置进行通信的状况。高可靠性处理装置81A能够基于这些通信状况而检测出与车辆V相关的功能降低。即,高可靠性处理装置81A能够检测出与连接于ECU20A的致动器以及外部识别装置相关的功能降低。高可靠性处理装置81A进一步地也可以对ECU21B与连接于ECU21B的外部识别装置之间的通信状况进行监视。在该情况下,高可靠性处理装置81A能够检测出与连接于ECU21B的外部识别装置相关的功能降低。
高可靠性处理装置81A也作为在自动驾驶中进行代替控制的控制部而发挥功能。代替控制是指在判定为需要从自动驾驶向手动驾驶切换的情况下进行的控制,是代替通常的自动驾驶的控制的控制。在该代替控制中,高可靠性处理装置81A使用与自身连接的致动器(电动动力转向装置41A、液压装置42A、动力装置50)对车辆V的行驶进行控制。具体而言,高可靠性处理装置81A在维持自动驾驶行驶的同时,对车辆V的驾驶员进行用于请求向手动驾驶切换的报告。在对于该报告在一定时间(例如,4秒、15秒)内没有反应的情况下,高可靠性处理装置81A在使车辆V减速的同时,寻找能够使车辆V停止的位置。高可靠性处理装置81A在能够发现可停止的位置的情况下使车辆V停止在该处,在无法发现可停止的位置的情况下,在使车辆V以极低速(例如,爬行速度)行驶的同时,寻找可停止的位置。之后,高可靠性处理装置81A根据转速传感器39的检测结果,对车辆V的停止进行判定,在判定为已停止时,维持车辆V的停止。
ECU21B也与ECU20A同样地包括高性能处理装置80B和高可靠性处理装置81B。高性能处理装置80B的处理性能比高可靠性处理装置81B的处理性能高。高可靠性处理装置81B的可靠性比高性能处理装置80B的可靠性高。高可靠性处理装置81B例如满足ASIL D,高性能处理装置80B例如满足ASIL B。
高性能处理装置80B从外部识别装置组82接受输入(例如,外部信息、诊断信息),基于该输入来决定手动驾驶中的车辆V的行驶的辅助内容,并将该内容供给至高可靠性处理装置81B。高可靠性处理装置81B决定用于实现该辅助的各致动器的操作量,生成对致动器组83的指示,并供给至对各致动器进行控制的ECU。
高可靠性处理装置81B也作为对与外部识别装置组82的通信线路的通信状况以及与致动器组83的通信线路的通信状况进行监视的监视部而发挥功能。高可靠性处理装置81B能够基于这些通信状况而检测出与车辆V相关的功能降低。即,高可靠性处理装置81B能够检测出与连接于ECU21B的致动器以及外部识别装置相关的功能降低。
高可靠性处理装置81B也作为在自动驾驶中进行代替控制的控制部而发挥功能。在该代替控制中,高可靠性处理装置81B使用与自身连接的致动器(电动动力转向装置41B、液压装置42B)对车辆V的行驶进行控制。这样,在本实施方式中,ECU20A的高可靠性处理装置81A和ECU21B的高可靠性处理装置81B这两者作为监视部和进行代替控制的控制部而发挥功能。因此,实现了较高的冗余性。
<车辆控制装置的功能构成>
图5A是表示实施方式所涉及的车辆控制装置(自动驾驶ECU:ECU20A)的功能构成的框图。ECU20A能够作为车辆V的行驶控制而执行与自动驾驶相关的控制,ECU20A具有高性能处理装置80A和高可靠性处理装置81A。图5B是对高性能处理装置80A以及高可靠性处理装置81A的处理的流程进行说明的图。
高性能处理装置80A作为功能构成而具有轨迹生成部510、自动驾驶控制部511、识别部512、路线偏离判定部513,高性能处理装置80A作为内部存储器而具有例如为RAM等易失性存储器的第一存储部514(第一存储介质)。
另外,高可靠性处理装置81A作为功能构成而具有动作监视部520,进一步地,作为内部存储器,例如具有为RAM等易失性存储器的第二存储部521(第二存储介质)。
此外,在图5A所示的构成中,示出了在ECU20A的内部设置有多个存储介质(第一存储部514、第二存储部521)的构成,但不限于该例子,也可以构成为将单一的存储部设置于ECU20A的内部,在高性能处理装置80A以及高可靠性处理装置81A进行处理时,从单一的存储部获取各装置所需的数据。在该情况下,除了存储部的可靠性之外,与高性能处理装置80A相比,在高可靠性处理装置81A中的运算处理中,需要确保更高的可靠性。例如,在高可靠性处理装置81A的配置中,可以施加防振结构以降低振动的影响、或采用配置在提高散热效率的位置的结构。
另外,作为存储部和高性能处理装置80A以及高可靠性处理装置81A的构成例,也能够将高性能处理装置80A以及高可靠性处理装置81A分为多个ECU,并在各ECU中设置存储部。
第一存储部514以及第二存储部521存储基于检测单元(例如,摄像机31A、光学雷达32A、陀螺仪传感器33A、GPS传感器28b等)的检测结果而获取到的表示车辆V的行驶状态的信息。
在此,表示车辆V的行驶状态的信息例如包括车辆V的位置信息(行驶轨迹)、转向角的信息、车辆V的绕铅垂轴的旋转角(偏航角)、旋转角速度(偏航率)等信息。从环境识别ECU21A以及位置识别ECU28A向第一存储部514以及第二存储部521输入的信息成为构成表示车辆V的行驶状态的信息的信息。存储在第一存储部514和第二存储部521中的信息相同。
在图5A中,环境识别ECU21A与图4所示的摄像机31A以及光学雷达32A连接,由摄像机31A以及光学雷达32A得到的外部信息被输入至环境识别ECU21A。环境识别ECU21A是对车辆V的行驶环境进行识别的环境识别单元,生成车道内的车辆V(本车辆)的位置、存在于车辆V的周围的目标物的轮廓、目标物与车辆V的距离、道路上的车道的划分线(白线等)等周边环境信息(目标物数据),并将生成的周边环境信息(目标物数据)存储于第一存储部514以及第二存储部521中。
另外,位置识别ECU28A是对车辆V的当前位置、行进路线进行识别的位置识别单元,进行对陀螺仪传感器33A、GPS传感器28b、通信装置28c的控制以及检测结果或者通信结果的信息处理。位置识别ECU28A将从陀螺仪传感器33A的检测结果等获取到的车辆V的行进路线的信息、从GPS传感器28b获取到的车辆V的当前位置的信息等存储于第一存储部514以及第二存储部521中。
轨迹生成部510基于由用户设定的行驶条件、目的地的信息,生成车辆V的目标轨迹(图5B的S501)。自动驾驶控制部511基于由轨迹生成部510生成的目标轨迹,进行自动地对车辆V的转向进行控制的自动驾驶控制(图5B的S502)。
识别部512对基于自动驾驶控制部511所进行的自动驾驶控制而行驶的车辆的行驶状态进行识别(图5B的S503)。识别部512基于识别结果,计算出表示车辆V的行驶状态的信息(例如,车辆V的位置信息(行驶轨迹)、转向角的信息、车辆V的绕铅垂轴的旋转角(偏航角)、旋转角速度(偏航率)等)相对于目标轨迹的偏离量(图5B的S504)。
基于识别部512的识别结果,在表示行驶状态的信息相对于目标轨迹的偏离量为第一阈值以上的情况下(S505-是),路线偏离判定部513输出请求进行驾驶交替的请求信号(ON)515(图5B的S506:输出步骤)。路线偏离判定部513将请求信号(ON)515的输出输入至高可靠性处理装置81A的动作监视部520侧的处理的步骤S515。然后,路线偏离判定部513使处理返回至步骤S501,反复执行同样的处理。
另一方面,在步骤S505的判定中,在表示行驶状态的信息相对于目标轨迹的偏离量小于第一阈值的情况下(S505-否),偏离量在允许范围内,路线偏离判定部513判定为不需要进行驾驶交替。在该情况下,路线偏离判定部513不输出请求进行驾驶交替的请求信号(ON)(请求信号(OFF):图5B的S507)。然后,路线偏离判定部513使处理返回至步骤S501,反复执行同样的处理。
作为高性能处理装置80A的功能构成的轨迹生成部510、自动驾驶控制部511、识别部512以及路线偏离判定部513以第一访问频度(第一时钟)对第一存储部514进行访问,并执行基于在第一存储部514中存储的表示行驶状态的信息的处理。
在高性能处理装置80A中,多个处理部(轨迹生成部510、自动驾驶控制部511、识别部512以及路线偏离判定部513)分别以第一访问频度(第一时钟)对第一存储部514进行访问,由此能够以更短的时间执行多任务。
另外,作为高可靠性处理装置81A的功能构成的动作监视部520对路线偏离判定部513的处理进行监视。
在图5B的步骤S511中,动作监视部520获取在步骤S501中由轨迹生成部510生成的车辆V的目标轨迹。
在步骤S512中,动作监视部520以比第一访问频度小的第二访问频度对第二存储部521进行访问,并从第二存储部中获取表示行驶状态的信息(例如,车辆V的位置信息(行驶轨迹)、转向角的信息、车辆V的绕铅垂轴的旋转角(偏航角)、旋转角速度(偏航率)等)。然后,动作监视部520计算使用表示车辆的行驶状态的信息和目标轨迹计算出的、表示行驶状态的信息相对于目标轨迹的偏离量。动作监视部520通过以下的S513~S517的监视步骤的各处理,对路线偏离判定部513的处理进行监视。
在步骤S513中,动作监视部520将通过内部运算计算出的偏离量与第二阈值(>第一阈值)进行比较。在偏离量小于第二阈值的情况下(S513-否),动作监视部520使处理返回至步骤S511,并执行同样的处理。
另一方面,在步骤S513的判定中,在偏离量为第二阈值以上的情况下(S513-是),动作监视部520使处理进入步骤S514。
在步骤S514中,动作监视部520判定偏离量为第二阈值以上的状态是否持续了规定的期间。在偏离量为第二阈值以上的状态未持续规定的期间的情况下(S514-否),动作监视部520使处理返回至步骤S511,并执行同样的处理。在此,关于持续期间判定处理的具体内容,参照图7、图8进行说明。
另一方面,在步骤S514的判定中,在偏离量为第二阈值以上的状态持续了规定的期间的情况下(S514-是),动作监视部520使处理进入步骤S515。
在步骤S515中,动作监视部520判定是否从路线偏离判定部513输出了请求进行驾驶交替的请求信号(ON)515。在未输出请求信号(ON)515的情况下(S515-否),动作监视部520判定为在路线偏离判定部513中产生了异常(异常判定:S517)。
即,动作监视部520在使用表示车辆V的行驶状态的信息和目标轨迹计算出的、表示行驶状态的信息相对于目标轨迹的偏离量为比第一阈值大的第二阈值以上(S513~是)、且未输出请求信号的状态持续了规定期间的情况下(S514-是、S515-否),判定为路线偏离判定部513产生了异常(S517)。
动作监视部520在判定为在路线偏离判定部513中产生了异常的情况下,设定能够识别异常状态的异常标志,并抑制自动驾驶控制部511所进行的自动驾驶控制。动作监视部520在判定为路线偏离判定部513产生了异常的情况下,在车辆V的自动驾驶控制结束后,禁止自动驾驶控制部511所进行的自动驾驶控制的再启动。在该情况下,直到通过经销商等的维护而使路线偏离判定部513的动作恢复正常为止,动作监视部520维持自动驾驶控制部511所进行的自动驾驶控制的再启动禁止的状态。当路线偏离判定部513的动作通过经销商等的维护而恢复正常时,异常标志的设定被解除,动作监视部520解除自动驾驶控制部511所进行的自动驾驶控制的抑制,允许自动驾驶控制的再启动。
另一方面,在步骤S515的判定中,在从路线偏离判定部513输出了请求信号(ON)的情况下(S515-是),动作监视部520判定为路线偏离判定部513的动作正常(正常判定:S516)。然后,动作监视部520使处理返回至步骤S511,并反复执行同样的处理。动作监视部520输出表示步骤S515的判定结果的判定信号522(表示正常判定的信号、或者表示异常判定的信号)。
动作监视部520使用以比第一访问频度小的第二访问频度(第二时钟)对第二存储部521进行访问而从第二存储部521中获取到的表示行驶状态的信息、和由轨迹生成部510生成的目标轨迹,来计算表示行驶状态的信息相对于目标轨迹的偏离量,并基于计算出的偏离量对路线偏离判定部513的处理进行监视。
在由于所谓的RAM滚动这样的存储器错误而使RAM中存储的值发生了变化的情况下,在执行多任务的高性能处理装置80A中,路线偏离判定部513等的输出成为异常值,例如,有可能产生尽管已偏离目标轨迹但不输出请求进行驾驶交替的请求信号这样的异常状态持续的情况。
在高可靠性处理装置81A的动作监视部520中,与高性能处理装置80A(轨迹生成部510、自动驾驶控制部511、识别部512、路线偏离判定部513)的处理相比,处理的内容被限定,被特化为对路线偏离判定部513进行监视的处理。动作监视部520以比第一访问频度小的第二访问频度(第二时钟)对第二存储部521进行访问,由此,与在高性能处理装置80A中以第一访问频度(第一时钟)对第一存储部514进行访问的路线偏离判定部513等的处理相比,能够实现抑制了RAM滚动等存储器错误的、更高可靠性的处理。
(动作的概要)
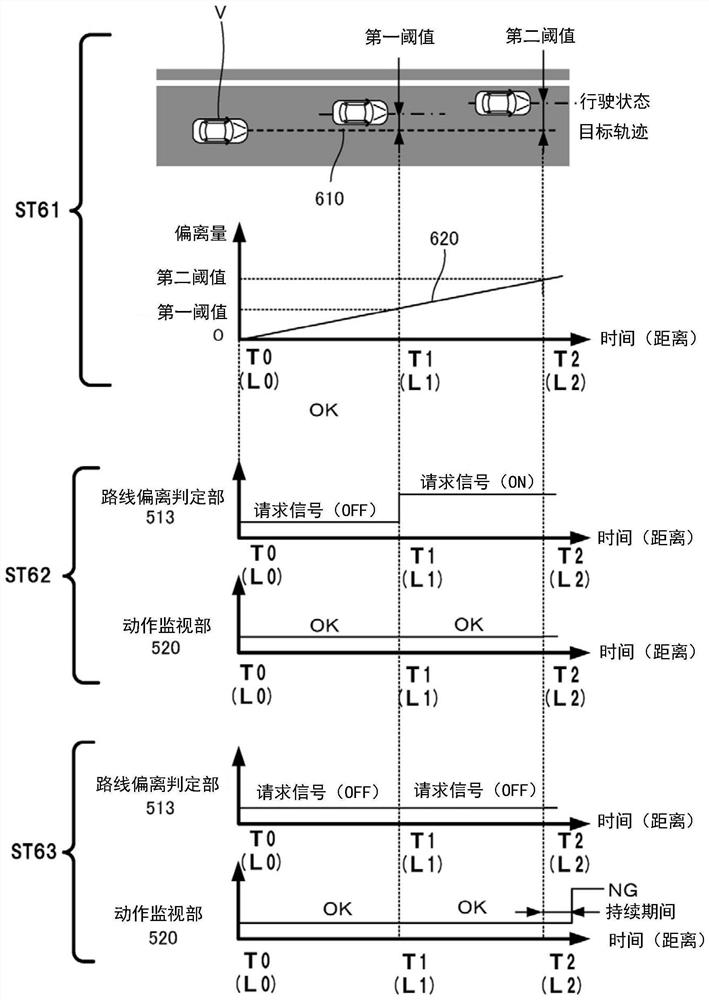
图6是对路线偏离判定部513以及动作监视部520的动作的概要进行说明的图。ST61是对行驶状态620相对于车辆V(本车辆)的目标轨迹610的偏离量进行说明的图。目标轨迹610是先前说明的轨迹生成部510基于由用户设定的行驶条件、目的地的信息而生成的车辆V的目标轨迹。另外,基于通过识别部512的处理而识别出的车辆V的行驶状态来获取行驶状态620。识别部512获取表示车辆V的行驶状态620的信息(例如,车辆V的位置信息(行驶轨迹)、转向角、车辆V的绕铅垂轴的旋转角(偏航角)等)相对于目标轨迹610的偏离量。
在ST61中,将时间T0(或距离L0)下的车辆V(本车辆)的位置作为原点,从原点起经过规定时间后或行驶规定距离后,时间T1(距离L1)下的偏离量为第一阈值。
另外,从时间T1(距离L1)起经过规定时间后或行驶规定距离后,时间T2(距离L2)下的偏离量为第二阈值。此外,在ST61中,示例性地以直线示出了行驶状态620的变化,但并不限定于该例子,能够根据车辆V1的行驶状态任意地变更。
ST62是示意性地表示路线偏离判定部513正常动作的情况下的处理的图。路线偏离判定部513基于识别部512的识别结果,在表示行驶状态620的信息相对于目标轨迹610的偏离量小于第一阈值的情况下,路线偏离判定部513判定为不需要进行驾驶交替。在该情况下,路线偏离判定部513不输出请求进行驾驶交替的请求信号(ON)(请求信号(OFF))。
另外,路线偏离判定部513基于识别部512的识别结果,在表示行驶状态620的信息相对于目标轨迹610的偏离量为第一阈值以上的情况下,输出请求进行驾驶交替的请求信号(ON)。
动作监视部520在通过内部运算计算出的偏离量小于第一阈值的情况下,判定为偏离量在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理是正常的,并输出表示正常判定的信号(OK)。
另外,动作监视部520在通过内部运算计算出的偏离量为第一阈值以上的情况下,判定为输出请求信号(ON)的路线偏离判定部513的处理是正常的,并输出表示正常判定的信号(OK)。
此外,在ST62中,为了使说明容易理解,示出了在与时间T1(距离L1)相同的时机输出请求信号(ON)的输出的例子,但并不限定于该例子,例如,如图7的ST71所示,也可以是在达到第一阈值后,在偏离量为第一阈值以上的状态持续的情况下(经过第一期间后),输出请求进行驾驶交替的请求信号(ON)。
例如,如图7的ST71所示,通过进行持续期间的判定,在不需要输出请求信号(ON)的情况下,例如,在车辆V受到横风的影响、或在拐角处行驶的情况等、偏离量暂时超过第一阈值的情况下,能够抑制请求信号的输出。
图6的ST63是示意性地表示路线偏离判定部513不正常动作的情况下的处理的图。路线偏离判定部513基于识别部512的识别结果,在表示行驶状态620的信息相对于目标轨迹610的偏离量小于第一阈值的情况下,路线偏离判定部513判定为不需要进行驾驶交替。在该情况下,路线偏离判定部513不输出请求进行驾驶交替的请求信号(ON)(请求信号(OFF))。
另外,路线偏离判定部513基于识别部512的识别结果,在表示行驶状态620的信息相对于目标轨迹610的偏离量为第一阈值以上的情况下,不输出请求进行驾驶交替的请求信号(ON),维持不输出请求信号(ON)的状态(请求信号(OFF))。
动作监视部520在通过内部运算计算出的偏离量小于第一阈值的情况下,判定为偏离量在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理判定是正常的,并输出表示正常判定的信号(OK)。
动作监视部520在通过内部运算计算出的偏离量为第一阈值以上且小于第二阈值的情况下,判定为偏离量在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理是正常的,并维持表示正常判定的信号(OK)的输出。
另外,动作监视部520在通过内部运算计算出的偏离量为第二阈值以上、且未输出请求信号的状态持续了规定的期间的情况下,判定为在路线偏离判定部513中产生了异常(异常判定),并输出表示异常判定的信号(异常(NG))。
(路线偏离判定部513以及动作监视部520的动作)
接着,参照图7,对路线偏离判定部513以及动作监视部520的动作具体地进行说明。在图7中,ST71是对路线偏离判定部513的动作进行说明的图,ST72是对动作监视部520的动作进行说明的图。
(图7的ST71的说明)
ST71中的波形711表示识别部512所获取到的、表示车辆V的行驶状态的信息(例如,车辆V的位置信息(行驶轨迹)、转向角、车辆V的绕铅垂轴的旋转角(偏航角)、旋转角速度(偏航率)等)相对于目标轨迹的偏离量的变化。
单点划线表示第一阈值712,双点划线表示第二阈值713。在路线偏离判定部513的处理中,第一阈值712成为路线偏离基准。第二阈值713成为动作监视部520中的路线偏离基准。
在偏离量暂时超过第一阈值的情况下,为了抑制请求信号的输出,路线偏离判定部513进行持续期间判定处理。在此,持续期间包括时间的持续以及行驶距离的持续这两者。
路线偏离判定部513在内部具有计时器,能够在测量开始的时机下启动计时器而进行时间的测量。另外,路线偏离判定部513也能够对在测量开始的时机下从第一存储部514获取到的车辆V的位置信息进行累计来进行行驶距离的测量。
在ST71中,PT71是偏离量711变为第一阈值712以上的点,路线偏离判定部513在PT71的时机下开始期间测量。
在对时间进行测量的情况下,例如,作为持续期间判定的基准时间,对计时器设定初始时间(初始值)。计时器在期间测量开始的时机下开始初始时间(初始值)的倒计数,在初始时间(初始值)成为零时结束期间测量。通过基于计时器的期间测量的结束,路线偏离判定部513判定为以规定的期间(在ST71中为第一期间)持续了偏离量711为第一阈值712以上的状态。
另一方面,在对行驶距离进行测量的情况下,例如,作为持续期间判定的基准行驶距离,在路线偏离判定部513内部的距离计数器中设定初始行驶距离(初始值)。距离计数器在期间测量开始的时机下开始初始行驶距离(初始值)的倒计数,在初始行驶距离(初始值)成为零时结束期间测量。通过基于距离计数器的期间测量的结束,路线偏离判定部513判定为以规定的期间(在ST71中为第一期间)持续了偏离量711为第一阈值712以上的状态
在表示的行驶状态(例如,图6的620)的信息相对于目标轨迹(例如,图6的610)的偏离量711小于第一阈值的情况下,路线偏离判定部513判定为不需要进行驾驶交替。在该情况下,路线偏离判定部513不输出请求进行驾驶交替的请求信号(ON)(请求信号(OFF)715)。
在ST71中,虚线所示的信号波形表示在路线偏离判定部513正常地发挥功能的情况下输出的请求信号(ON)716。在路线偏离判定部513正常地发挥功能的情况下,在偏离量711为第一阈值以上的状态持续了规定的期间(第一期间)之后,应该输出请求信号(ON),但在ST71中,不输出请求信号(ON)716,路线偏离判定部513维持不输出请求信号(ON)的状态(请求信号(OFF)715)。
(图7的ST72的说明)
ST72中的波形721表示动作监视部520通过内部运算计算出的偏离量的变化。
单点划线表示第一阈值712,双点划线表示第二阈值713。第一阈值712以及第二阈值713与在路线偏离判定部513中说明的各阈值相同。第二阈值713成为动作监视部520中的路线偏离基准。
在偏离量721暂时超过第二阈值713的情况下,为了抑制将路线偏离判定部513的处理判定为不正常(异常判定)(表示异常判定的信号(NG)的输出),动作监视部520进行持续期间判定处理。在此,持续期间包括时间的持续以及行驶距离的持续这两者。
动作监视部520在内部具有计时器,能够在测量开始的时机下启动计时器而进行时间的测量。另外,动作监视部520也能够对在测量开始的时机下从第二存储部521获取到的车辆V的位置信息进行累计来进行行驶距离的测量。
在ST72中,PT72是偏离量721变为第二阈值713以上的点,动作监视部520在PT72的时机下开始期间测量。
在对时间进行测量的情况下,例如,作为持续期间判定的基准时间,对计时器设定初始时间(初始值)。计时器在期间测量开始的时机下开始初始时间(初始值)的倒计数,在初始时间(初始值)成为零时结束期间测量。通过基于计时器的期间测量的结束,动作监视部520判定为以规定的期间(在ST72中为第二期间)持续了偏离量721为第二阈值713以上的状态。
另一方面,在对行驶距离进行测量的情况下,例如,作为持续期间判定的基准行驶距离,在动作监视部520内部的距离计数器中设定初始行驶距离(初始值)。距离计数器在期间测量开始的时机下开始初始行驶距离(初始值)的倒计数,在初始行驶距离(初始值)成为零时结束期间测量。通过基于距离计数器的期间测量的结束,动作监视部520判定为以规定的期间(在ST72中为第二期间)持续了偏离量721为第二阈值713以上的状态。
动作监视部520在通过内部运算计算出的偏离量721小于第一阈值的情况下,判定为偏离量在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理是正常的,并输出表示正常判定的信号(正常(OK)725)。
另外,动作监视部520在通过内部运算计算出的偏离量721为第一阈值712以上且小于第二阈值713的情况下,判定为偏离量721在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理是正常的,维持表示正常判定的信号(正常(OK)725)的输出。
另外,动作监视部520在通过内部运算计算出的偏离量721为第二阈值713以上、且未输出请求信号的状态持续了规定的期间(ST72的第二期间)的情况下,判定为在路线偏离判定部513中产生了异常(异常判定),输出表示异常判定的信号(异常(NG)726)。
(动作监视部520的动作例)
图8是对动作监视部520的动作例进行说明的图。波形811表示动作监视部520通过内部运算计算出的偏离量的变化。如在图7中说明的那样,单点划线表示第一阈值712,双点划线表示第二阈值713。第二阈值713成为动作监视部520中的路线偏离基准。
动作监视部520所执行的持续期间判定处理与在图7中说明的处理相同,在用于判定持续期间的参数中包括时间的持续以及行驶距离的持续这两者。
动作监视部520从检测出偏离量811为第二阈值713以上的状态的时间点(PT81)起,开始偏离量811为第二阈值713以上的状态的持续期间的计数,在偏离量小于第二阈值的情况下(PT82)将持续期间的计数复位。在图8中,PT81是通过内部运算计算出的偏离量811变为第二阈值713以上的点,动作监视部520在PT81的时机下开始期间测量。
在对时间进行测量的情况下,例如,作为持续期间判定的基准时间,对计时器设定初始时间(初始值)。计时器在期间测量开始的时机下开始初始时间(初始值)的倒计数。
另一方面,在对行驶距离进行测量的情况下,例如,作为持续期间判定的基准行驶距离,对动作监视部520内部的距离计数器设定初始行驶距离(初始值)。距离计数器在期间测量开始的时机下开始初始行驶距离(初始值)的倒计数。
PT82是偏离量811变为小于第二阈值713的点,动作监视部520在PT82的时机下中止期间测量。在进行使用了计时器的持续期间判定的情况下,通过动作监视部520的中止判定,计时器中止倒计数而进行使所测量的时间返回至初始时间(初始值)的计数器复位。另外,在进行使用了距离计数器的持续期间判定的情况下,通过动作监视部520的中止判定,距离计数器中止倒计数而进行使所测量的行驶距离返回至初始行驶距离(初始值)的计数器复位。
PT83是通过内部运算计算出的偏离量811变为第二阈值713以上的点,动作监视部520在PT83的时机下再次开始期间测量。
在进行使用了计时器的持续期间判定的情况下,在初始时间(初始值)成为零时,计时器结束期间测量。通过基于计时器的期间测量的结束,动作监视部520判定为以规定的期间(第二期间)持续了偏离量811为第二阈值713以上的状态。
另外,在进行使用了距离计数器的持续期间判定的情况下,在初始行驶距离(初始值)成为零时,距离计数器结束期间测量。通过基于距离计数器的期间测量的结束,动作监视部520判定为以规定的期间(第二期间)持续了偏离量811为第二阈值713以上的状态。
动作监视部520在通过内部运算计算出的偏离量811小于第一阈值的情况下,判定为偏离量811在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理是正常的,并输出表示正常判定的信号(正常(OK)825)。
另外,动作监视部520在通过内部运算计算出的偏离量811为第一阈值712以上且小于第二阈值713的情况下,判定为偏离量811在允许范围内、未输出请求进行驾驶交替的请求信号(ON)的路线偏离判定部513的处理是正常的,并维持表示正常判定的信号(正常(OK)825)的输出。
另外,动作监视部520在通过内部运算计算出的偏离量811为第二阈值713以上、且未输出请求信号的状态持续了规定的期间(第二期间)的情况下(NG判定成立),判定为在路线偏离判定部513中产生了异常(异常判定),输出表示异常判定的信号(异常(NG)826)。
[其他实施方式]
另外,实现在各实施方式中说明的一种以上的功能的车辆控制程序经由网络或存储介质供给至系统或装置,该系统或装置的计算机中的一个以上的处理器能够读出并执行该程序。通过这样的方式也能够实现本发明。
<实施方式的总结>
构成1、上述实施方式的车辆控制装置(例如,图4、图5A的ECU20A)具有:轨迹生成部(例如,图5A的510),其生成车辆(例如,图1的V)的目标轨迹;自动驾驶控制部(例如,图5A的511),其进行基于由所述轨迹生成部(510)生成的所述目标轨迹而自动地对所述车辆的转向进行控制的自动驾驶控制;识别部(例如,图5A的512),其对基于所述自动驾驶控制而行驶的所述车辆的行驶状态进行识别;以及路线偏离判定部(例如,图5A的513),其在表示所述行驶状态的信息相对于所述目标轨迹的偏离量为第一阈值以上的情况下,输出请求进行驾驶交替的请求信号,其中,
所述车辆控制装置(例如,图4、图5A的ECU20A)还具备动作监视部(例如,图5A的520),所述动作监视部对所述路线偏离判定部的处理进行监视,
所述动作监视部(520)在使用表示所述车辆的行驶状态的信息(例如,车辆V的位置信息(行驶轨迹)、转向角、车辆V的绕铅垂轴的旋转角(偏航角)、旋转角速度(偏航率)等)和所述目标轨迹(例如,图6的610)计算出的、表示所述行驶状态的信息相对于该目标轨迹(610)的偏离量为比所述第一阈值(例如,图7、图8的712)大的第二阈值(例如,图7、图8的713)以上、且未输出所述请求信号的状态持续了规定的期间(例如,图7、图8的第二期间)的情况下,判定为所述路线偏离判定部(513)产生了异常。
根据构成1的车辆控制装置,能够判定尽管已偏离目标轨迹但未输出请求进行驾驶交替的请求信号这样的异常状态。
构成2、在上述实施方式的车辆控制装置(ECU20A)中,所述动作监视部(520)在判定为所述路线偏离判定部(513)产生了异常的情况下,抑制所述自动驾驶控制部(511)所进行的所述自动驾驶控制。
根据构成2的车辆控制装置,在判定为路线偏离判定部产生了异常的情况下,能够抑制自动驾驶控制的执行,能够在车辆控制装置的各构成正常的状态下执行自动驾驶控制。
构成3、在上述实施方式的车辆控制装置(ECU20A)中,所述动作监视部(520)在判定为所述路线偏离判定部(513)产生了异常的情况下,在所述车辆(V)的所述自动驾驶控制结束后,禁止所述自动驾驶控制部(511)所进行的所述自动驾驶控制的再启动。
根据构成3的车辆控制装置,在判定为路线偏离判定部产生了异常的情况下,在自动驾驶控制结束后,禁止自动驾驶控制部所进行的自动驾驶控制的再启动,能够在车辆控制装置的各构成正常的状态下执行自动驾驶控制。
构成4、在上述实施方式的车辆控制装置(ECU20A)中,所述车辆控制装置还具备第一存储部(例如,图5的514)以及第二存储部(例如,图5的521),它们存储基于检测单元(例如,图1、图4的摄像机31A、光学雷达32A、陀螺仪传感器33A、GPS传感器28b等)的检测结果而获取到的表示所述车辆的行驶状态的信息,
所述轨迹生成部(510)、所述自动驾驶控制部(511)、所述识别部(512)以及所述路线偏离判定部(513)以第一访问频度对所述第一存储部(514)进行访问,并执行基于在该第一存储部中存储的表示所述行驶状态的信息的处理,
所述动作监视部(520)使用以比所述第一访问频度小的第二访问频度对所述第二存储部(521)进行访问而从该第二存储部(521)中获取到的表示所述行驶状态的信息和由所述轨迹生成部(510)生成的所述目标轨迹,计算出表示所述行驶状态的信息相对于该目标轨迹的偏离量,并基于计算出的该偏离量对所述路线偏离判定部(513)的处理进行监视。
根据构成4的车辆控制装置,在高可靠性处理装置的动作监视部中,与高性能处理装置(轨迹生成部、自动驾驶控制部、识别部、路线偏离判定部)的处理相比,处理的内容被限定,被特化为对路线偏离判定部进行监视的处理。动作监视部以比第一访问频度小的第二访问频度对第二存储部进行访问,由此,与以第一访问频度对第一存储部进行访问的路线偏离判定部等的处理相比,能够实现抑制了RAM滚动等存储器错误的、更高可靠性的处理。
构成5、在上述实施方式的车辆控制装置(ECU20A)中,所述动作监视部(520)在从检测到由该动作监视部(520)计算出的偏离量为所述第二阈值(713)以上的状态的时间点起,开始该偏离量为所述第二阈值以上的状态的持续期间的计数,并且在该偏离量变为小于所述第二阈值的情况下,将所述持续期间的计数复位。
根据构成5的车辆控制装置,在动作监视部计算出的偏离量暂时超过第二阈值的情况下,能够抑制将路线偏离判定部的处理判定为不正常(异常判定)的情况。由此,能够进行可靠性更高的判定处理。
构成6、上述实施方式的车辆(例如,图1的车辆V)具备构成1至构成5中的任一个构成所述的车辆控制装置(例如,图4、图5A的ECU20A)。
根据构成6的车辆,能够提供具有能够判定尽管已偏离目标轨迹但未输出请求进行驾驶交替的请求信号这样的异常状态的车辆控制装置的车辆。
构成7、上述实施方式的车辆控制装置的车辆控制方法,所述车辆控制装置(例如,图4、图5A的ECU20A)具有:轨迹生成部(例如,图5A的510),其生成车辆(例如,图1的V)的目标轨迹;自动驾驶控制部(例如,图5A的511),其进行基于由所述轨迹生成部生成的所述目标轨迹而自动地对所述车辆的转向进行控制的自动驾驶控制;识别部(例如,图5A的512),其对基于所述自动驾驶控制而行驶的所述车辆的行驶状态进行识别;路线偏离判定部(例如,图5A的513);以及动作监视部(例如,图5A的520),其中,
所述车辆控制方法具有:
输出步骤(例如,图5B的S506),在该输出步骤中,在所述路线偏离判定部(513)判定为表示所述行驶状态的信息相对于所述目标轨迹的偏离量为第一阈值以上的情况下,输出请求进行驾驶交替的请求信号;以及
监视步骤(例如,图5B的S513~S517),在该监视步骤中,所述动作监视部(520)对所述路线偏离判定部的处理进行监视,
在所述监视步骤中,在使用表示所述车辆的行驶状态的信息和所述目标轨迹计算出的、表示所述行驶状态的信息相对于该目标轨迹的偏离量为比所述第一阈值大的第二阈值以上、且未输出所述请求信号的状态持续了规定的期间的情况下,判定为所述路线偏离判定部产生了异常。
根据构成7的车辆控制装置的车辆控制方法,能够判定尽管已偏离目标轨迹但未输出请求进行驾驶交替的请求信号这样的异常状态。
本发明不限于上述的实施方式,可以在本发明的主旨的范围内进行各种变形、变更。
- 车辆控制装置、装有车辆控制装置的车辆及车辆控制方法
- 车辆控制装置、装有车辆控制装置的车辆及车辆控制方法