一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及工程机械定位技术领域,具体涉及一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法。
背景技术
随着煤矿装备技术的发展,国内煤矿巷道从以往以人工为主的掘进方式逐步实现了机械化掘进,但人工还不能完全从煤矿巷道中完全解放。我国煤矿巷道掘进以悬臂式掘进机为主,煤矿掘进工作面仍然是我国煤矿事故多发区,亟需提高掘进装备自动化和智能化水平,对于确保我国煤矿安全高效生产具有极其重要的意义。
煤矿巷道掘进主要采用悬臂式掘进机或称综掘机,配合连续式皮带运输装置实现快速掘进和运输。在掘进环节中,通常由测量队从大地基准开始接续测量直至巷道内,设置激光指向光源从后方指向采掘面,以指向激光光斑为基准确定采掘面的顶面、底面和两帮。由于采掘现场煤尘浓度极高、能见度极差,需要反复人工手持皮尺测量顶底板和两帮的超欠挖量。一方面,通过这种方式施工,人员必须站在采掘面附近进行操作,煤尘大、距未支护区近,对操作手造成极大的健康威胁和安全隐患;另一方面,由于采掘断面形状控制依赖人工目视和经验判断,超欠挖和截割断面起伏严重,给支护带来不便,增加了塌方风险。
现有的定位系统,有的结构复杂,有的不能得到物体的空间位姿的六个物理参数,实现精确定位,还有的需要在巷道中设置固定或者可移动的参考标记或者基站,需要人工固定参考标记或者通过多个无线定位基站机器人、通过点测来参与掘进机导航过程,人工没有完全解放,对于煤矿巷道定位都有一定的局限性。
综上所述,急需一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法以解决现有技术中存在的问题。
发明内容
本发明目的在于提供一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法,以解决现有煤矿巷道掘进装备定位方法无法获取机身在大地坐标系中的全部位姿参数,实时测量受限,测量结果不准确,不能实现安全高效的智能化掘进等问题。
为实现上述目的,本发明提供了一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法,采用了一种定位装置,所述定位装置包括UWB(超宽带)雷达发射机、UWB雷达接收机和惯性测量单元;UWB雷达发射机安装在巷道内,UWB雷达接收机、惯性测量单元安装在掘进设备上;定位方法包括以下步骤:
步骤一:测量UWB雷达发射机、UWB雷达接收机在地理坐标系下的坐标;测量惯性测量单元相对于掘进设备的位置关系;测量UWB雷达相对于惯性测量单元的位置关系;求得掘进设备在移动过程中在地理坐标系下的坐标(X
步骤二:通过惯性测量单元得到掘进设备在X、Y、Z三个方向的位移增量ΔX、ΔY、ΔZ,以及围绕着X、Y、Z三个轴的角度偏移量Δβ、Δα、Δγ;进一步得到掘进设备在行驶过程中的实时位置(X
步骤三:结合UWB雷达测距的方式观察掘进设备位置,得到观测值;通过惯性测量单元得到掘进设备的动作值,采用卡尔曼滤波的方式对观测值和动作值进行处理,修正定位误差。
进一步地,所述步骤一UWB雷达发射机、UWB雷达接收机在地理坐标系下的坐标,惯性测量单元相对于掘进设备的位置关系,UWB雷达相对于惯性测量单元的位置关系均通过全站仪或人工放线的方式测量得到。
进一步地,所述惯性测量单元配备的是自标定的单轴激光陀螺仪。
进一步地,所述惯性测量单元内含有三个单轴加速度计;三个单轴加速度计提供掘进装备在行驶工作过程中在X、Y、Z轴三个相交垂直方向上实时的加速度a
进一步地,所述惯性测量单元内含三个单轴激光陀螺仪;三个单轴激光陀螺仪分别测得围绕着X、Y、Z三个轴的角加速度α
进一步地,惯性测量单元测量到的数据中,横滚角度Δβ、俯仰角度Δα通过重力实时修正观测,偏航角度Δγ通过惯性测量单元自身配备的自标定功能来定期归零;纵向偏移量和竖向偏移量产生的误差受到掘进设备机身轮胎的限制,满足精准定位的精度;横向偏移误差没有限制也不能自动修正,会随着时间成二次方的增长,需要对横向偏移量进行修正误差。
应用本发明的技术方案,具有以下有益效果:
本发明基于UWB雷达及惯性测量单元,通过多种技术手段实时得到设备在某一空间中的精确位置及姿态信息。通过UWB雷达,通过惯性测量单元获取机身相对于大地水平面的位置(横向偏移、纵向偏移以及竖向偏移)与姿态(横滚角度、偏航角度、俯仰角度),最终解算出掘进装备的实时位姿信息,UWB雷达实现测距只与时间参数有关,不受外界环境的任何影响。本发明结构简单,可以获取机身定位的全部信息,可靠性高;解决在地下工程、煤矿巷道、隧道掘进等施工作业过程中,工程机械等的空间位置、姿态判断等信息的实时采集分析,由于基本原理决定,该发明不受能见度、空气含量、有害气体含量等影响,是实现地下工程施工装备智能化、远程操控、无人作业的第一步。定位过程不需要人工干预,实现安全高效的巷道掘进,为煤矿巷道掘进装备无人化和智能化提供技术支撑。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是煤矿巷道空间坐标系定义示意图;
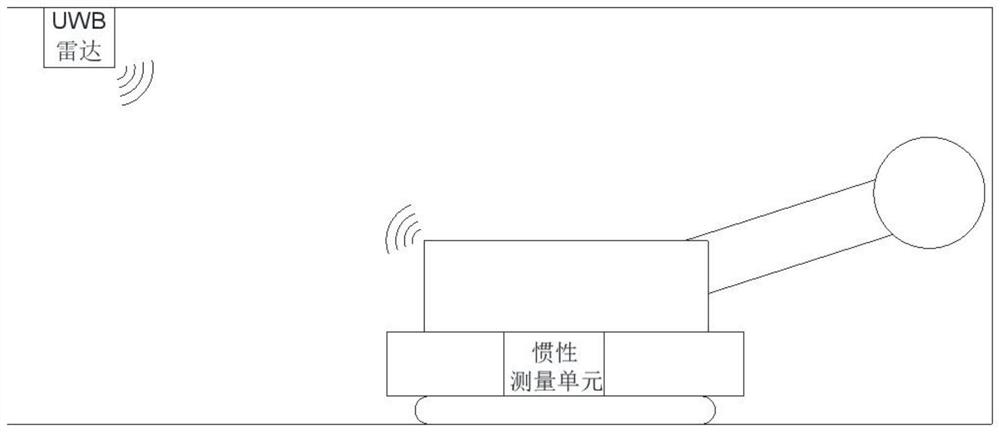
图2是UWB+惯性测量单元组合测量定位系统图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以根据权利要求限定和覆盖的多种不同方式实施。
实施例1:
参见图1、图2,一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法,本实施例应用于煤矿巷道中的掘进设备定位。
一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法,采用了一种定位装置,如图2所示,所述定位装置包括UWB雷达发射机、UWB雷达接收机和惯性测量单元;UWB雷达发射机安装在巷道内,UWB雷达接收机、惯性测量单元安装在掘进设备上。
图1为煤矿巷道空间坐标系定义示意图,以巷道掘进方向为x轴,垂直于巷道方向为z轴建立的右手坐标系。确定某一物体的空间位置,可以通过对一个物品在某一坐标参考系中的横向偏移、纵向偏移以及竖向偏移三个偏移量,也就是某一坐标系下的X、Y、Z的数值。以及在其坐标系下横滚角度、偏航角度、俯仰角度三个旋转角度,即这六个物理参数详细、准确的描述空间内任意物体的空间位置及姿态。
所述定位方法包括以下步骤:
步骤一,设备始发时,通过各种成熟测量手段(如全站仪、人工放线)等测量设备,测量UWB雷达发射机、UWB雷达接收机在地理坐标系下的坐标、惯导相对于设备的位置关系、雷达相对于惯导的位置关系。在设备移动过程中,UWB雷达接收机的位置不断变化,且UWB雷达实时测得UWB雷达发射机和UWB雷达接收机的距离,结合两者的初始位置坐标,可求得移动过程中的UWB雷达接收机的地理坐标系下的坐标,通过对应的位置转换关系,可求得设备在移动过程中在地理坐标系下的坐标(X
步骤二,在设备行走过程中,通过车载的惯性测量单元(内含三个单轴加速度计、三个个单轴激光陀螺仪),由三个加速度计提供车辆在行驶工作过程中在X、Y、Z三个相交垂直方向上实时的加速度a
步骤三,由于惯性测量单元(内含三个单轴加速度计、三个个单轴激光陀螺仪)的工作原理决定,激光陀螺仪会随着时间而漂移,导致机身动作值误差进行对时间的二次积累,呈现出平方性的增长,减小定位精度。因此我们结合UWB雷达测距的方式去观机身位置,得到观测值,通过卡尔曼滤波的方式对观测值和动作值进行处理,及时的去修正、减小这种误差。
通过惯性测量单元测量到的数据中,横滚角度Δβ、俯仰角度Δα可以通过重力实时修正观测,偏航角度Δγ只能通过惯性测量单元自身配备的自标定功能来定期归零。纵向偏移量和竖向偏移量产生的误差受到机身轮胎的限制,满足精准定位的精度。横向偏移误差没有限制也不能自动修正,会随着时间成二次方的增长,需要对横向偏移量进行修正误差。本发明则考虑卡尔曼滤波的方式去分析处理UWB雷达测距的观测值和惯性测量单元的动作值,使得定位更加精准。
由以上步骤,就可以得出描述机身位姿的六个物理参数,实现精准定位。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于UWB与惯性单元的地下巷道掘进装备实时定位方法
- 一种多传感器融合的巷道掘进装备实时定位系统和方法