动力传动系统
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及动力传动系统(powertrain system),更详细而言,涉及搭载于能够执行外部充电和外部放电中的至少一方的混合动力(hybrid)车辆的、具备能够驱动该混合动力车辆的内燃机和电动机以及对该电动机供给电力的电池的动力传动系统。
背景技术
例如,专利文献1中公开了一种混合动力车辆。该混合动力车辆具备内燃机、电动机以及对电动机供给电力的电池。而且,混合动力车辆由内燃机和电动机双方驱动。在这样构成的混合动力车辆中,制定用于使在从出发地到目的地的整个路径上燃料消耗量最小的电池的充放电计划。而且,从发动机行驶模式、电动机行驶模式以及使用内燃机和电动机双方的辅助行驶模式中选择基于该充放电计划的最优的混合动力车辆的行驶模式。另外,也执行基于充放电计划的电池的充放电控制。
现有技术文献
专利文献1:日本特开2015-155261号公报
发明内容
发明所要解决的问题
在这方面,在具备能够驱动混合动力车辆的内燃机和电动机以及对该电动机供给电力的电池的动力传动系统中,考虑以如下方式决定动力传动系统的工作点(以下,简称为“系统工作点”)和电池的充放电量。
具体而言,为了相对于在任意的控制期间(例如,从当前时刻到行程(trip)结束为止的期间)内使用的车速和车辆驱动转矩而使内燃机的燃料消耗量最小,考虑先行搜索并计算最优控制输入值,该最优控制输入值确定该控制期间内的将来的各时间点的系统工作点和充放电量。为了这样先行计算将来的各时间点的最优控制输入值,需要预测将来的车速和车辆驱动转矩。然而,上述控制期间内的车速和车辆驱动转矩不一定会如预测的那样,另外,在由于某些原因而不能进行预测的情况下,将无法适当地进行控制输入值的搜索。
另外,在对构成为与外部设备之间进行充放电的混合动力车辆搭载动力传动系统的情况下,在上次的控制期间与本次的控制期间之间(例如,上次行程与本次行程之间)的控制停止期间内,可能会在与外部设备之间执行电池的充电或者放电。因此,在假设搭载于这种混合动力车辆的动力传动系统中,希望能够也假设在控制停止期间内可能会执行电池的充电或者放电来适当地决定控制输入值。
本发明是鉴于如上所述的问题所做出的,目的在于提供如下的动力传动系统:无需预测将来的车速和车辆驱动转矩,就能够决定相对于在动力传动控制的控制期间内使用的车速和车辆驱动转矩而使内燃机的燃料消耗量最小的控制输入值,并且即使在控制停止期间内与外部设备之间进行了充电或放电的情况下,也能够适当地决定该控制输入值。
用于解决问题的技术方案
本发明涉及的动力传动系统具备:内燃机,其驱动混合动力车辆;电动机,其驱动所述混合动力车辆;电池,其对所述电动机供给电力;以及控制装置,其进行控制所述内燃机和所述电动机的动力传动控制,所述混合动力车辆构成为能够与一个或多个外部设备之间执行所述电池的充电和放电中的至少一方,所述控制装置在进行所述动力传动控制的控制期间内执行控制输入决定处理和系统控制处理,在所述控制输入决定处理中,以所述电池的充电率SOC的动态变化作为约束条件,解决相对于所述混合动力车辆的速度和驱动转矩而使所述控制期间内的所述内燃机的燃料消耗量m
其中,上式的右边第1项是所述燃料消耗量m
也可以,在所述初始值决定处理中,使所述初始值在所述外部充放电量为正的情况下比所述外部充放电量为零的情况下大。
也可以,在所述初始值决定处理中,使所述初始值在所述外部充放电量为负的情况下比所述外部充放电量为零的情况下小。
也可以,所述初始值决定处理中的所述外部充放电校正值是所述外部充放电量与第1增益的乘积。而且也可以,所述第1增益基于所述混合动力车辆的行驶历史记录来设定。
也可以,所述行驶历史记录包括第1平均车速和第1平均驱动转矩中的至少一方,所述第1平均车速和所述第1平均驱动转矩是上次的所述控制期间内的所述速度和所述驱动转矩的各自的平均值。
也可以,在所述行驶历史记录包括所述第1平均车速的情况下,所述第1平均车速越高,则所述第1增益越大。
也可以,在所述行驶历史记录包括所述第1平均驱动转矩的情况下,所述第1平均驱动转矩越高,则所述第1增益越大。
也可以,所述伴随变量决定处理包括伴随变量修正处理,在所述伴随变量修正处理中,基于所述充电率SOC的目标充电率与实际充电率之差,修正所述伴随变量p。
也可以,在所述伴随变量修正处理中,在所述实际充电率低于所述目标充电率的情况下,减小所述伴随变量p。
也可以,在所述伴随变量修正处理中,在所述实际充电率高于所述目标充电率的情况下,增大所述伴随变量p。
也可以,所述伴随变量修正处理中的所述伴随变量p的校正值是所述差与第2增益的乘积。而且也可以,所述第2增益基于所述混合动力车辆的行驶历史记录来设定。
也可以,所述行驶历史记录包括第2平均车速和第2平均驱动转矩中的至少一方,所述第2平均车速是第1预定期间内的所述速度的平均值,所述第2平均驱动转矩是第2预定期间内的所述驱动转矩的平均值。
也可以,在所述行驶历史记录包括所述第2平均车速的情况下,所述第2平均车速越高,则所述第2增益越大。
也可以,在所述行驶历史记录包括所述第2平均驱动转矩的情况下,所述第2平均驱动转矩越高,则所述第2增益越大。
发明效果
根据本发明涉及的动力传动系统,计算使由上式定义的哈密顿量H成为最小的控制输入值。因此,能够按时间步长决定使燃料消耗量成为最小的最优控制输入值。而且,该控制输入值是确定电池的充放电量和动力传动系统的系统工作点的输入值。因此,能够根据所决定的最优控制输入值,适当地决定充放电量和系统工作点。
而且,根据本发明涉及的控制输入决定处理,使用上次的控制期间内的伴随变量的最终值或者平均值作为成为对象的最优化问题的伴随变量的初始值。由此,即使将来(希望将控制输入值最优化的期间)的车速和驱动转矩是未知的(换言之就是无需另行预测将来的车速和驱动转矩),也能够按时间步长适当地决定充放电量和系统工作点。在此基础上,根据初始值决定处理,上述基本值根据基于控制停止期间内的外部充放电量的外部充放电校正值来校正。由此,即使在控制停止期间内与外部设备之间进行了充电或者放电的情况下,相比于不包括初始值决定处理的例子,也能够更适当地决定确定充放电量和系统工作点的控制输入值。
附图说明
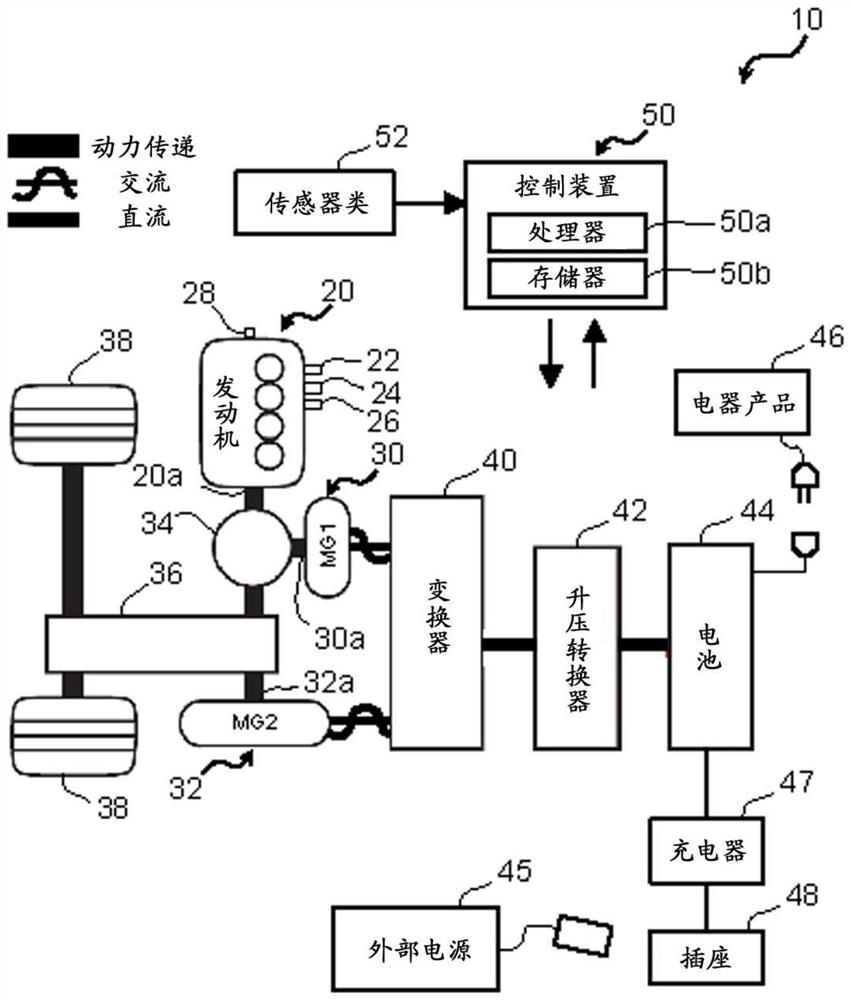
图1是用于说明本发明的实施方式1涉及的动力传动系统的构成例的示意图。
图2是表示与本发明的实施方式1涉及的动力传动控制相关联地由图1所示的控制装置执行的处理的框图。
图3是搜索使哈密顿量H最小的控制输入值u
图4是概念性地示出按时间步长Δt反复计算最优控制输入值u
图5是表示与本发明的实施方式1涉及的动力传动控制有关的处理的例程(routine)的流程图。
图6是用于对随着控制停止期间ts内的外部充电或者外部放电的执行带来的技术问题进行说明的时间图。
图7是示出本发明的实施方式1涉及的初始值决定处理所进行的校正的效果的时间图。
图8是示出SOC(k+1)与伴随变量p(k)的关系的图表。
图9是按车辆行驶模式分开示出伴随变量p与SOC的关系的图表。
图10是在模式A~模式G之间比较伴随变量p相对于SOC的灵敏度、即比率ΔP/ΔSOC而示出的图表。
图11是表示与本发明的实施方式2涉及的动力传动控制相关联地由实施方式2的控制装置执行的处理的框图。
图12是按车辆行驶模式示出第1平均车速aveV1以及第1平均驱动转矩aveTp1与比率ΔP/ΔSOC的关系的图表。
图13是表示本发明的实施方式2涉及的初始值决定处理的子例程的流程图。
图14是示出本发明的实施方式2涉及的初始值决定处理所进行的校正的效果的时间图。
图15是用于对实施方式1、2涉及的动力传动控制的技术问题与具有其对策的实施方式3涉及的动力传动控制比较着进行说明的时间图。
图16是表示与本发明的实施方式3涉及的动力传动控制相关联地由实施方式3的控制装置执行的处理的框图。
图17是表示与本发明的实施方式3涉及的动力传动控制有关的处理的例程的流程图。
图18是表示与本发明的实施方式4涉及的动力传动控制相关联地由实施方式4的控制装置执行的处理的框图。
图19是表示在本发明的实施方式4涉及的动力传动控制中为了根据偏差ΔSOC(k)修正伴随变量p(k)所执行的处理的子例程的流程图。
图20是用于说明在利用为了与本发明的实施方式4的伴随变量修正处理进行对比所参照的伴随变量修正处理(比较例1、2)的情况下的工作的时间图。
图21是用于说明在利用本发明的实施方式4的伴随变量修正处理的情况下的工作的时间图。
标号说明
10动力传动系统;20内燃机;28曲轴角传感器;30电动发电机(MG1);32电动发电机(MG2);34动力分配机构;38车轮;40变换器(inverter);44电池;45外部电源;46电器产品;50、62、70、80控制装置;52传感器类。
具体实施方式
以下,参照附图,对本发明的实施方式进行说明。但是,对于在各图中共同的要素标注同一标号并省略或简化重复的说明。在以下所示的实施方式中提及了各要素的个数、数量、量、范围等数值的情况下,除了特别明示的情况或者原理上明确地确定为该数值的情况以外,本发明不限定于所提及的数值。另外,在以下所示的实施方式中说明的结构、步骤等除了特别明示的情况或者原理上明确地确定为该结构、步骤等的情况以外,不一定是本发明所必需的。
1.实施方式1
首先,参照图1~图8,对本发明的实施方式1进行说明。
1-1.动力传动系统的构成例
图1是用于说明本发明的实施方式1涉及的动力传动系统10的构成例的示意图。图1所示的动力传动系统10具备内燃机20并且具备第1电动发电机30(以下,简称为“MG1”)和第2电动发电机32(以下,简称为“MG2”)作为车辆的动力源。即,作为一例,动力传动系统10应用于混合动力车辆。
作为一例,内燃机20是火花点火式发动机。然而,成为本发明的对象的内燃机也可以是压缩着火式发动机,另外,其汽缸数及汽缸配置不特别限定。内燃机20具备节气门22、燃料喷射阀24以及点火装置26作为用于控制发动机转矩Te的致动器。节气门22配置于进气通路(图略),控制吸入空气流量。燃料喷射阀24配置于各汽缸,例如直接向汽缸内喷射燃料。点火装置26使用配置于各汽缸的火花塞对汽缸内的混合气进行点火。另外,内燃机20具备用于各种发动机控制的各种传感器。此处所说的各种传感器包括输出与曲轴角相应的信号的曲轴角传感器28。
MG1和MG2均为能够发电的电动机。即,MG1和MG2兼具作为利用被供给的电力输出转矩的电动机的功能与作为将被输入的机械动力转换为电力的发电机的功能,例如是交流同步式的电动发电机。在图1所示的动力传动系统10中,MG1主要作为发电机使用,MG2主要作为驱动车辆的电动机使用。因此,在动力传动系统10的例子中,MG1和MG2中的MG2主要相当于本发明涉及的“电动机”的一例。另外,根据运转条件,存在MG1通过产生负转矩以维持发动机转矩Te从而产生车辆的驱动转矩的情况,因此MG1也与MG2一起相当于本发明涉及的“电动机”的一例。
内燃机20、MG1和MG2经由动力分配机构34以及减速机构36与车轮38连结。动力分配机构34例如为行星齿轮单元,将从内燃机20输出的发动机转矩Te向MG1和车轮38分配。更详细而言,在动力分配机构34中,太阳轮连结于MG1的输出轴30a,行星架连结于内燃机20的曲轴20a,齿圈连结于MG2的输出轴32a。齿圈经由旋转自如地支承于行星架的多个小齿轮而与太阳轮啮合。从内燃机20输出的发动机转矩Te或者从MG2输出的MG2转矩Tm经由减速机构36向车轮38传递。即,内燃机20以及MG2产生并且控制车辆的驱动力。MG1能够使用经由动力分配机构34从内燃机20供给的发动机转矩Te进行再生发电。因此,MG1也用于控制车辆的驱动力。另外,MG2在车辆减速时作为发电机发挥功能,回收车辆动能并转换为电力。
MG1和MG2经由变换器40以及升压转换器42与电池44进行电力的交换。变换器40将储存于电池44的电力从直流变换为交流并向MG2供给,并且将由MG1和MG2生成的电力从交流变换为直流并储存于电池44。因此,电池44利用通过MG1和MG2产生的电力充电,由于电力被MG2消耗而放电。升压转换器42根据需要使电池44的电压上升。
搭载动力传动系统10的混合动力车辆构成为能够与外部电源45之间执行电池44的外部充电、并且能够与电器产品46之间执行电池44的外部放电。外部电源45以及电器产品46相当于本发明涉及的“外部设备”的一例。换言之,本混合动力车辆是具有外部供电功能的插电式混合动力车辆。具体而言,混合动力车辆具备充电器47和插座48。经由插座48以及充电器47从外部电源(充电设备)45向电池44供给电力。其结果,电池44通过外部电源45充电。另一方面,电器产品46例如是家用电器。电池44的电力通过使电器产品46工作而消耗。即,电池44通过电器产品46放电。另外,从外部电源45供给到电池44的电力也使用于本混合动力车辆的驱动。此外,不限于这样的例子,搭载本发明涉及的“动力传动系统”的混合动力车辆也可以构成为能够与一个或多个外部设备之间执行电池的充电和放电中的任一方。
本实施方式的动力传动系统10还具备用于控制动力传动(内燃机20、MG1和MG2)的控制装置50。控制装置50是具有处理器50a和存储器50b的电子控制单元(ECU)。存储器50b存储有用于控制动力传动系统10的程序。处理器50a从存储器50b读取程序并执行程序。控制装置50从用于控制动力传动的各种传感器收取传感器信号。另外,处理器50a使用收取到的传感器信号执行各种程序,输出用于操作动力传动的各种致动器的操作信号。
除了上述的曲轴角传感器28等用于发动机控制的各种传感器之外,控制装置50还电连接有包括加速器位置传感器、制动器位置传感器以及车速传感器的传感器类52等用于动力传动的控制的各种传感器。控制装置50能够使用来自曲轴角传感器28的信号计算发动机转速Ne。
另外,控制装置50电连接有用于控制包括上述的内燃机20(节气门22、燃料喷射阀24以及点火装置26)、MG1和MG2的动力传动的各种致动器。再者,控制装置50构成为能够计算电池44的充电率(SOC)。更详细而言,SOC相当于当前的充电量相对于电池44的满充电量的比例(%)。SOC的取得方法没有特别限定,例如可以通过具备计测流入电池44、从电池44流出的电流的电流传感器,并按时间对计测出的电流进行积分来取得(计算)SOC。此外,控制装置50也可以由多个ECU构成。
在利用上述的动力分配机构34的本动力传动系统10中,若将车辆的要求驱动转矩称为Tp、将MG1的转矩和转速称为Tg和Ng、将MG2的转矩和转速称为Tm和Nm,则用于由动力传动系统10进行的车辆控制的主要参数的关系能够表示为以下的式(1)~(4)。此外,式(1)~(4)中的g1~g6均为正值。更详细而言,g1~g3和g6是动力分配机构34的齿数比,g4和g5是通过不仅包括动力分配机构34的齿数比,还包括用于将车速V转换为齿圈的转速的差动比以及轮胎直径而决定的值。
Tm=(Tp-Te·g1)/g2…(1)
Tg=-Te·g3…(2)
Nm=V·g4…(3)
Ng=V·g5+Ne·g6…(4)
根据上述的式(1)~(4)的关系,在某个车速V以及要求驱动转矩(车辆驱动转矩的要求值)Tp下,如果确定了发动机转矩Te和发动机转速Ne,则可确定当前的电池44的充放电量Pchg和当前的动力传动系统10的工作点(以下,简称为“系统工作点”)。更详细而言,确定系统工作点这一情况与确定内燃机20的转矩Te和转速Ne、MG1的转矩Tg和转速Ng以及MG2的转矩Tm和转速Nm这一情况相同。另外,电池44的充放电量Pchg通过确定MG1的转矩Tg和转速Ng以及MG2的转矩Tm和转速Nm来确定。这是因为充放电量Pchg成为和MG1的转矩Tg与转速Ng的乘积以及MG2的转矩Tm与转速Nm的乘积相应的值。而且,当确定了电池44的充放电量Pchg时,能够确定SOC。
此外,根据式(4)的关系,在与发动机转矩Te一起确定了MG1的转速Ng代替发动机转速Ne的情况下,也能够同样地确定充放电量和系统工作点。另外,根据式(2)的关系,为了确定充放电量Pchg和系统工作点,也可以使用MG1的转矩Tg代替发动机转矩Te。再者,根据式(3)的关系,在与要求驱动转矩Tp一起给出了MG2的转速Nm代替车速V的情况下,也能够与上述同样地确定充放电量Pchg和系统工作点。此外,车辆驱动转矩相当于车辆的行驶负荷。
1-2.动力传动控制
控制装置50执行为了车辆行驶而控制内燃机20、MG1和MG2的动力传动控制。图2是表示与本发明的实施方式1涉及的动力传动控制相关联地由控制装置50执行的处理的框图。控制装置50与动力传动控制相关联地执行的处理包括“控制输入决定处理54”和“系统控制处理56”。这些处理在进行动力传动控制的控制期间τ内进行。该控制期间τ的一例为车辆的1个行程(从系统起动开始时到系统停止时的期间)。但是,进行动力传动控制的控制期间τ不一定限于1个行程,也可以是1个行程中的任意一部分期间。
1-2-1.控制输入决定处理54
在动力传动系统10的工作期间(车辆行驶期间),电池44的SOC根据电池44的充放电量Pchg发生变化而变动。执行控制输入决定处理54,以使用SOC的动态变化(动态)作为约束条件,解决相对于车速V和要求驱动转矩Tp而使控制期间τ内的内燃机20的燃料消耗量m
在该最优化问题中,使用由以下的式(5)定义的哈密顿量H。如式(5)所示,哈密顿量H是燃料消耗量m
以下的式(7)表示式(5)中的伴随变量p应该满足的关系。式(7)中的Ne
Ne,Te∈U={EV模式(Ne,Te=0)}∪(发动机运转的范围的Ne,Te)…(8)
(伴随变量决定处理58和控制输入计算处理60)
如图2所示,控制输入决定处理54包括“伴随变量决定处理58”和“控制输入计算处理60”。控制输入计算处理60按时间步长Δt搜索并计算使由式(5)定义的哈密顿量H最小的控制输入值u(t)。本最优化问题可以换作求取使哈密顿量H最小的控制输入值u(t)这一问题来考虑,该问题如以下的式(9)所示。即,式(9)的右边所示的哈密顿量H相当于该问题的目标函数。在各采样时刻t处使哈密顿量H最小的控制输入值u(t)例如能够通过利用拟牛顿法(quasi-Newton method)解决由式(9)表示的问题来计算。
此外,在动力传动系统10的例子中,控制输入计算处理60用于按时间步长Δt搜索并计算使HV模式下的哈密顿量H
更详细而言,在哈密顿量H
采样时刻t的HV模式时的哈密顿量H
H
在以下的说明中,在表示连续的时刻的情况下使用“t”,在表示离散的时刻(即,每个时间步长Δt的各时刻)的情况下使用“k”。为了由控制输入计算处理60进行的控制输入值u(t)的计算,给予当前的SOC、当前的车速V及要求驱动转矩Tp,并一起给予通过伴随变量决定处理58决定的伴随变量p(t)。具体而言,伴随变量决定处理58包括后述的初始值决定处理59。伴随变量p的初始值p
关于控制期间τ开始后的第二次以后的伴随变量p的运算,根据伴随变量决定处理58,按时间步长Δt逐次计算并更新伴随变量p(t)。更详细而言,该伴随变量p(t)的更新(即,下一采样时刻(k+1)的伴随变量p(k+1)的计算)通过将当前的采样时刻k的SOC(k)、最优控制输入值u
图3是搜索使哈密顿量H(更详细而言是H
接着,图4是概念性地示出按时间步长Δt反复计算最优控制输入值u
另外,在初次的采样时刻(k=0),伴随变量决定处理58对代入了最优控制输入值u
在下一采样时刻(k=1),控制输入计算处理60使用如上所述那样计算出的伴随变量p
(初始值决定处理59)
初始值决定处理59使用车辆的上次控制期间τ内的伴随变量p的最终值p
P
外部充放电校正值p
ΔSOC
P
为方便起见,将从上次控制期间τ的结束时到本次控制期间τ的开始时的期间称为“控制停止期间ts”(参照后述的图6)。在该控制停止期间ts内,既没有进行外部充电也没有进行外部放电的情况下,外部充放电量ΔSOC
另一方面,在控制停止期间ts内进行了外部充电的情况下,外部充放电量ΔSOC
另外,在控制停止期间ts内进行了外部放电的情况下,外部充放电量ΔSOC
1-2-2.系统控制处理56
图2所示的系统控制处理56将通过控制输入决定处理54如上所述那样求出的最优控制输入值u(t)
以下的式(15)示出动力传动系统10的驱动系统的运动方程式。换言之,式(15)是规定与由动力传动系统10控制的状态量(控制量)相当的要求驱动转矩Tp(Nm)、充放电量Pchg(W)以及发动机转速Ne的变化率dNe/dt(rad/s
在式(15)中,除了与充放电量Pchg和转矩Tg、Tm有关的c
当通过控制输入决定处理54决定了最优发动机转速Ne
1-2-3.控制例程
图5是表示与本发明的实施方式1涉及的动力传动控制有关的处理的例程的流程图。作为一例,本例程在动力传动系统10的起动期间(即1个行程期间)按预定的时间步长Δt反复执行。即,本实施方式的控制期间τ的一例为车辆的1个行程。
此外,本实施方式的“控制输入决定处理54”与以下的步骤S100~S106的处理对应,“系统控制处理56”与步骤S108的处理对应。更详细而言,包括“初始值决定处理59”的“伴随变量决定处理58”对应于步骤S102及S106的处理,另外,步骤S104的处理包括进行HV模式用的运算的“控制输入计算处理60”。
在图5所示的例程中,首先,在步骤S100中,控制装置50取得(计算)当前的(实际)SOC,并且使用传感器类52取得当前的车速V及要求驱动转矩Tp。更详细而言,当前的车速V例如使用车速传感器来取得,要求驱动转矩Tp作为与由加速器位置传感器检测出的加速器踏板的踩踏量相应的值来取得。之后,处理前进至步骤S102。
在步骤S102中,控制装置50取得当前的采样时刻k的伴随变量p(k)。控制装置50的存储器50b中存储有上次的控制期间τ(在本实施方式中为上次行程)内的伴随变量p的最终值p
此外,如前所述,初始值p
另外,在步骤S102中,在本动力传动控制的开始后的第二次以后的运算中,使用通过后述的步骤S106的处理在上一采样时刻(k-1)计算出的伴随变量p(k)作为本次的采样时刻的伴随变量p(k)。之后,处理前进至步骤S104。
在步骤S104中,控制装置50通过解决由上述式(9)表示的最优化问题,搜索并计算使哈密顿量H最小的最优控制输入值u
在步骤S104之后,处理前进至步骤S106。在步骤S106中,控制装置50计算在下一采样时刻(k+1)的运算中使用的伴随变量p(k+1)。伴随变量p(k+1)的计算方法如参照式(7)所述的那样。计算出的伴随变量p(k+1)存储于存储器50b。之后,处理前进至步骤S108。
在步骤S108中,控制装置50执行用于将通过步骤S104的处理计算出的最优控制输入值u
1-3.效果
根据以上说明的本实施方式的动力传动系统10,在每个采样时刻k取得由式(5)定义的哈密顿量H成为最小的最优控制输入值u
而且,根据本实施方式的控制输入决定处理54,使用上次的控制期间τ内的伴随变量p的最终值p
此外,使用上次的控制期间τ内的最终值p
接着,对使用基于外部充放电量ΔSOC
图6是用于对随着控制停止期间ts内的外部充电或者外部放电的执行带来的技术问题进行说明的时间图。在图6中,表示了在上次的行程(控制期间τ)中实际SOC以使起始SOC
但是,如图6中的虚线的例子那样,上述的效果以本次的起始SOC
如上所述,在将上次的控制期间τ内的最终值p
鉴于这种技术问题,根据本实施方式的初始值决定处理59,在控制停止期间ts内进行了外部充电或者外部放电的情况下,由基于外部充放电量ΔSOC
图7是示出本发明的实施方式1涉及的初始值决定处理59所进行的校正的效果的时间图。图8是示出SOC(k+1)与伴随变量p(k)的关系的图表。如图8所示,采样时刻k的伴随变量p(k)与下一采样时刻(k+1)的SOC(k+1)彼此成反比例关系。更详细而言,当根据当前的采样时刻k的伴随变量p(k)以及(实际)SOC(k)决定了最优控制输入值u
根据初始值决定处理59,如由式(12)~(14)所示的那样,在控制停止期间ts内进行了外部充电的情况下,初始值p
同样地,根据初始值决定处理59,在控制停止期间ts内进行了外部放电的情况下,初始值p
由于以上说明的原因,根据初始值决定处理59,在控制停止期间ts内进行了外部充电或者外部放电的情况下,如图7所示,与没有进行该校正的情况相比,能够使本次行程的终止SOC
2.实施方式2
接着,参照图9~图14,对本发明的实施方式2进行说明。
2-1.动力传动控制
实施方式2在以下之处与上述的实施方式1不同。即,在实施方式1中,作为校正增益G1,使用了固定值。与此相对,在本实施方式中,为了考虑外部充放电的影响来更适当地设定初始值p
图9是按车辆行驶模式分开示出伴随变量p与SOC的关系的图表。在图9中例示了模式A~G。图9中的各直线相当于在使用各车辆行驶模式期间每隔预定时间采样得到的伴随变量p和(实际)SOC的数据的绘制值的近似直线。
在图9所示的例子中,使用模式A~G获得了多种多样的车辆行驶模式的信息。更详细而言,模式A相当于包括市区模式、郊外模式和高速路模式的WLTC(World harmonizedLight vehicles Test Cycle,全球统一轻型车辆测试循环)模式。模式B相当于美国的高速路模式之一的HWY模式。模式C相当于模拟日本的市区的交通拥堵行驶的模式。模式D相当于模拟大都市的交通拥堵行驶的其他交通拥堵行驶模式。模式E相当于作为美国的其他高速路模式的US06模式。模式F相当于模拟洛杉矶郊外的行驶模式的LA#4模式。模式G相当于过去在日本使用的JC08模式。
车辆行驶模式不同时,车辆的行驶方式(代表性的是车速V以及车辆驱动转矩(要求驱动转矩Tp)的变化方式)会不同。其结果,如图9所示,伴随变量p与SOC的关系根据车辆行驶模式而不同。更详细而言,由图9中所示的各近似直线的斜率(比率ΔP/ΔSOC)的差异可知,由于车辆行驶模式的差异,伴随变量p相对于SOC的灵敏度发生变化。图10是在模式A~模式G之间比较伴随变量p相对于SOC的灵敏度、即比率ΔP/ΔSOC而示出的图表。
根据上述的实施方式1的初始值决定处理59,初始值p
因此,如上所述在初始值决定处理59中所使用的校正增益G1为固定值时,在上次行程的车辆的行驶方式与设定校正增益G1时设想的车辆的行驶方式不同的情况下,校正增益G1有可能不再合适。这可能会导致混合动力车辆的燃料经济性恶化。此外,即使所使用的校正增益G1不是固定值,但如果没有考虑伴随变量p相对于SOC的灵敏度根据上次行程的车辆的行驶方式而变化之处而使得校正增益G1变更,也可能会产生与上述同样的技术问题。
图11是表示与本发明的实施方式2涉及的动力传动控制相关联地由控制装置62执行的处理的框图。控制装置62的处理与控制装置50的处理的不同之处在于,控制输入决定处理54’所包括的伴随变量决定处理58’包括初始值决定处理64以取代初始值决定处理59。
初始值决定处理64基于混合动力车辆的行驶历史记录设定校正增益G1。作为行驶历史记录的具体例子,可使用作为上次的控制期间τ(上次行程)内的车速V和要求驱动转矩Tp的各自的平均值的第1平均车速aveV1和第1平均驱动转矩aveTp1。即,在本实施方式中,为了设定校正增益G1而使用上次行程的行驶历史记录。
图12是按车辆行驶模式示出第1平均车速aveV1以及第1平均驱动转矩aveTp1与比率ΔP/ΔSOC的关系的图表。更详细而言,与各车辆行驶模式(模式A~G)有关的绘制点对应于使用各个模式期间的数据整体(aveV1、aveTp1、ΔP/ΔSOC)的平均值。因此,模式A~G根据各个模式期间的平均的车辆行驶负荷(车辆驱动转矩)以及平均的车速而如图12中所示的那样分布。
图12中的近似直线L相当于与模式A~G的各绘制点有关的近似直线。如由该近似直线L所示的那样,第1平均车速aveV1越高,则比率ΔP/ΔSOC越高。另外,第1平均驱动转矩aveTp1越高,则比率ΔP/ΔSOC越高。如此,根据图12所示的三维关系可知,比率ΔP/ΔSOC与第1平均车速aveV1以及第1平均驱动转矩aveTp1具有高相关性。
根据上述见解,通过利用第1平均车速aveV1以及第1平均驱动转矩aveTp1,能够适当地取得基于上次行程的行驶历史记录的比率ΔP/ΔSOC(即,伴随变量p相对于SOC的灵敏度)。
以下的式(16)表示了在本实施方式的初始值决定处理64中所使用的校正增益G1的计算式的一例。如式(16)所示,在本实施方式中,将作为第1平均车速aveV1和第1平均驱动转矩aveTp1的函数f(aveV1,aveTp1)的比率ΔP/ΔSOC用作校正增益G1。
G1=f(aveV1,aveTp1)=A·aveV1+B·aveTp1+C…(16)
如式(16)的例子那样,作为校正增益G1、即比率ΔP/ΔSOC的近似式,能够使用以第1平均车速aveV1以及第1平均驱动转矩aveTp1为自变量的一次式。该近似式中的系数A、B和C例如使用最小二乘法等多元回归分析预先设定。通过利用这种近似式,能够取得(推定)与基于上次行程的行驶历史记录的比率ΔP/ΔSOC(即,伴随变量p相对于SOC的灵敏度)相应的适当的校正增益G1。
此外,通过利用具有如图12所示的关系的比率ΔP/ΔSOC,第1平均车速aveV1越高,则校正增益G1设定得越大。另外,第1平均驱动转矩aveTp1越高,则校正增益G1设定得越大。
此外,为了设定校正增益G1所使用的近似式不限于上述的一次式的例子,也可以是二次以上的高次式。另外,为了设定校正增益G1,也可以代替这种近似式而使用确定了相对于第1平均车速aveV1以及第1平均驱动转矩aveTp1的比率ΔP/ΔSOC的关系的映射(图略)。
2-1-1.控制例程
图13是表示本发明的实施方式2涉及的初始值决定处理64的子例程的流程图。控制装置62将该子例程的处理与上述的图5所示的例程(主例程)并行地执行。而且,该子例程的处理在上述主例程的步骤S102中计算初始值p
在图13所示的子例程中,首先,在步骤S200中,控制装置62使用上次的终止SOC
控制装置62在各行程结束时计算行程中的车辆行驶历史记录(第1平均车速aveV1以及第1平均驱动转矩aveTp1)并存储于存储器。在步骤S202中,控制装置62取得那样的上次行程的第1平均车速aveV1以及第1平均驱动转矩aveTp1的存储值。
计算第1平均车速aveV1所使用的车速V例如能够使用车速传感器取得。计算第1平均驱动转矩aveTp1所使用的车辆驱动转矩例如是要求驱动转矩Tp。如前所述,要求驱动转矩Tp例如能够作为与由加速器位置传感器检测出的加速器踏板的踩踏量相应的值来取得。另外,为了计算第1平均驱动转矩aveTp1所使用的车辆驱动转矩也可以是实际驱动转矩。
在步骤S202之后,处理前进至步骤S204。在步骤S204中,控制装置62决定校正增益G1。具体而言,控制装置62使用上述式(16),计算与通过步骤S202的处理所取得的第1平均车速aveV1以及第1平均驱动转矩aveTp1相应的校正增益G1。之后,处理前进至步骤S206。
在步骤S206中,控制装置62计算在步骤S200中所取得的外部充放电量ΔSOC
在步骤S208中,控制装置62按照上述式(12),计算基本值(上次行程的最终值p
2-2.效果
图14是示出本发明的实施方式2涉及的初始值决定处理64所进行的校正的效果的时间图。根据以上说明的本实施方式的初始值决定处理64,基于上次行程的车辆行驶历史记录来设定校正增益G1。如前所述,伴随变量p相对于SOC的灵敏度(即比率ΔP/ΔSOC)根据车辆的行驶方式而变化。因此,通过考虑上次行程的车辆行驶历史记录(车辆的行驶方式)来决定校正增益G1,与将校正增益G1设为固定值的例子相比,能够使用与上次行程的行驶方式相应的适当的校正增益G1,且能够适当地算出基于外部充放电量ΔSOC
更详细而言,根据初始值决定处理64,第1平均车速aveV1越高,则校正增益G1设定得越大。由此,能够考虑第1平均车速aveV1越高、则表示伴随变量p相对于SOC的灵敏度的比率ΔP/ΔSOC越高这一特性,适当地设定校正增益G1。再者,第1平均驱动转矩aveTp1越高,则校正增益G1设定得越大。由此,能够考虑第1平均驱动转矩aveTp1越高、则表示上述灵敏度的比率ΔP/ΔSOC越高这一特性,适当地设定校正增益G1。
3.实施方式3
接着,参照图15~图17,对本发明的实施方式3进行说明。
3-1.动力传动系统的构成例
实施方式3涉及的动力传动系统除了具备后述的图16所示的控制装置70以代替控制装置50之处以外,与实施方式1涉及的动力传动系统10是同样的。
3-2.动力传动控制
3-2-1.实施方式1、2涉及的控制输入决定处理54、54’的技术问题
根据上述的控制输入决定处理54、54’,作为伴随变量p的初始值p
然而,过去的行驶模式与将来的行驶模式不一定相同。具体而言,在使用控制输入决定处理54的例子中,若假设将来的行驶模式相对于过去的行驶模式而不同,则实际SOC轨迹(相对于时间发生变动的实际SOC的变动中心线)有可能从SOC控制中心值(参照后述的图15)偏离。
图15是用于对上述的实施方式1、2涉及的动力传动控制的技术问题与具有其对策的实施方式3涉及的动力传动控制比较着进行说明的时间图。在图15中由虚线所示的实际SOC的波形表示了在实施方式1、2涉及的动力传动控制的执行期间产生了相对于SOC控制中心值的实际SOC的轨迹的偏离的例子。更详细而言,图15表示了随着时间的经过实际SOC轨迹向实际SOC相对于SOC控制中心值(例如60%)降低的一侧(即,放电侧)偏离的例子。实际SOC轨迹有时也与图15所示的例子相反地向实际SOC相对于SOC控制中心值增高的一侧(即,充电侧)偏离。此处所说的SOC控制中心值相当于本发明涉及的“目标充电率”的一例。
3-2-2.考虑到将来的行驶模式相对于过去的行驶模式的变化的动力传动控制的概要
图16是表示与本发明的实施方式3涉及的动力传动控制相关联地由控制装置70执行的处理的框图。控制装置70在以下说明的点上与实施方式1的控制装置50不同。即,控制装置70与动力传动控制相关联地执行的处理包括“控制输入决定处理72”以代替“控制输入决定处理54”。而且,该控制输入决定处理72所包括的“伴随变量决定处理74”与实施方式1的伴随变量决定处理58的不同之处在于,鉴于参照图15所说明的技术问题而包括“伴随变量修正处理74a”,并且包括初始值决定处理59。如此,在本实施方式中,在控制停止期间ts内进行了外部充电或者外部放电的情况下,伴随变量p的初始值p
为了基于SOC的偏差ΔSOC
伴随变量修正处理74a基于如上那样计算出的偏差ΔSOC
接着,表示基于偏差ΔSOC
修正后p=修正前p+ΔSOC
偏差ΔSOC
另一方面,在实际SOC轨迹向充电侧偏离了的情况下(实际SOC>SOC控制中心值),偏差ΔSOC
如前所述,可以说使用上次的控制期间τ内的最终值p
3-2-3.控制例程
图17是表示与本发明的实施方式3涉及的动力传动控制有关的处理的例程的流程图。此外,关于图17所示的例程中的步骤S100~S108的处理,如在实施方式1中所述。本例程的步骤S300及S302的处理对应于“伴随变量修正处理74a”。
在图17所示的例程中,处理在步骤S102之后前进至步骤S300。在步骤S300中,控制装置70计算当前的采样时刻k的偏差ΔSOC
在步骤S302中,控制装置70根据在步骤S300中计算出的偏差ΔSOC
之后,处理前进至步骤S104。因此,由步骤S302的处理进行修正后的伴随变量p(k)反映在由步骤S104的处理进行的最优控制输入值u
3-3.效果
如上所述,由本实施方式的控制装置70执行的控制输入决定处理72的伴随变量决定处理74包括伴随变量修正处理74a。根据伴随变量修正处理74a,在动力传动控制的执行期间,根据偏差ΔSOC
3-4.伴随变量修正处理的执行时期的其他例子
在上述的实施方式3中,举出了按时间步长Δt修正伴随变量p的伴随变量修正处理74a的例子。然而,也可以替代上述的例子,例如按比时间步长Δt(动力传动控制的控制周期)长的任意的周期,在进行动力传动控制的控制期间内反复执行本发明涉及的“伴随变量修正处理”。
4.实施方式4
接着,参照图18~图21,对本发明的实施方式4进行说明。
4-1.动力传动系统的构成例
实施方式4涉及的动力传动系统除了具备后述的图18所示的控制装置80以代替控制装置70之处以外,与实施方式3涉及的动力传动系统是同样的。
4-2.动力传动控制
4-2-1.实施方式3涉及的伴随变量修正处理74a的技术问题
根据上述的实施方式3的伴随变量修正处理74a,根据SOC的偏差ΔSOC
因此,若在如上所述的反馈处理中所使用的FB增益G2为固定值,则在除了在设定FB增益G2时假设的车辆行驶模式以外的车辆行驶模式下,FB增益G2有可能不再合适。这可能会导致混合动力车辆的燃料经济性恶化。此外,即使所使用的FB增益G2不是固定值,但如果没有考虑伴随变量p相对于SOC的灵敏度根据车辆行驶模式而变化之处来变更FB增益G2,则也可能产生与上述同样的技术问题。
4-2-2.实施方式4涉及的伴随变量修正处理84a的概要
图18是表示与本发明的实施方式4涉及的动力传动控制相关联地由控制装置80执行的处理的框图。控制装置80在以下说明的点上与实施方式3的控制装置70不同。即,控制装置80与动力传动控制相关联地执行的处理包括“控制输入决定处理82”和“系统控制处理56”。而且,该控制输入决定处理82所包括的“伴随变量决定处理84”与实施方式3的伴随变量决定处理74的不同之处在于,鉴于参照图9以及图10所说明的技术问题而包括“伴随变量修正处理84a”以代替“伴随变量修正处理74a”,并且包括初始值决定处理59。
伴随变量修正处理84a与伴随变量修正处理74a的不同之处在于,使用如下这样设定的FB增益G2。具体而言,在本实施方式中使用的FB增益G2基于混合动力车辆的行驶历史记录来设定。作为行驶历史记录的具体例子,使用第2平均车速aveV2和第2平均驱动转矩aveTp2。
第2平均车速aveV2相当于在预定期间内的车速V的平均值。第2平均驱动转矩aveTp2相当于在预定期间内的车辆驱动转矩(要求驱动转矩Tp)的平均值。它们的预定期间的一例为从当前时刻追溯30秒。如此,在本实施方式中,为了设定FB增益G2,使用相对于当前时刻的刚刚之前的行驶历史记录。此外,FB增益G2的设定方法与实施方式2的校正增益G1的设定方法类似。但是,设定校正增益G1所使用的第1平均车速aveV1以及第1平均驱动转矩aveTp1分别为“上次行程中的车速V以及要求驱动转矩Tp的平均值”这一点与在本实施方式中所使用的第2平均车速aveV2以及第2平均驱动转矩aveTp2不同。
此外,与计算第2平均车速aveV2有关的预定期间相当于本发明涉及的“第1预定期间”的一例,与计算第2平均驱动转矩aveTp2有关的预定期间相当于本发明涉及的“第2预定期间”的一例。在上述的例子中,第1预定期间与第2预定期间相同,但它们也可以不必相同。
如前所述,设定FB增益G2所使用的第2平均车速aveV2以及第2平均驱动转矩aveTp2在成为车速V以及要求驱动转矩Tp的各平均值的计算对象的期间内不同于第1平均车速aveV1以及第1平均驱动转矩aveTp1。然而,关于第2平均车速aveV2以及第2平均驱动转矩aveTp2,也能在第2平均车速aveV2以及第2平均驱动转矩aveTp2与比率ΔP/ΔSOC之间得到与图12所表示的同样的关系。而且,根据从图12获得的上述见解(参照实施方式2),通过利用第2平均车速aveV2以及第2平均驱动转矩aveTp2,能够适当地取得基于相对于当前时刻的刚刚之前的行驶历史记录的比率ΔP/ΔSOC(即,伴随变量p相对于SOC的灵敏度)。
以下的式(18)表示了在本实施方式的伴随变量修正处理84a中所使用的FB增益G2的计算式的一例。如式(18)所示,在本实施方式中,将作为第2平均车速aveV2与第2平均驱动转矩aveTp2的函数的比率ΔP/ΔSOC用作FB增益G2。
如式(18)的例子那样,作为FB增益G2、即比率ΔP/ΔSOC的近似式,能够使用以第2平均车速aveV2以及第2平均驱动转矩aveTp2为自变量的一次式。该近似式中的系数A、B和C例如使用最小二乘法等多元回归分析预先设定。通过利用这种近似式,能够取得(推定)与基于相对于当前时刻的刚刚之前的行驶历史记录的比率ΔP/ΔSOC(即,伴随变量p相对于SOC的灵敏度)相应的适当的FB增益G2。
此外,通过利用具有如图12所示的关系的比率ΔP/ΔSOC,第2平均车速aveV2越高,则FB增益G2设定得越大。另外,第2平均驱动转矩aveTp2越高,则FB增益G2设定得越大。
此外,为了设定FB增益G2所使用的近似式不限于上述的一次式的例子,也可以是二次以上的高次式。另外,为了设定FB增益G2,也可以代替这种近似式而使用确定了相对于第2平均车速aveV2以及第2平均驱动转矩aveTp2的比率ΔP/ΔSOC的关系的映射(图略)。
4-2-3.控制例程
与本实施方式涉及的动力传动控制有关的处理的主例程(图略)与实施方式3的图17所示的例程的不同之处在于,代替步骤S302的处理而执行接下来的图19所示的子例程的处理。
图19是表示在本发明的实施方式4涉及的动力传动控制中为了根据偏差ΔSOC
在图19所示的子例程中,首先,在步骤S400中,控制装置80取得偏差ΔSOC
在步骤S402中,控制装置80取得相对于当前时刻的刚刚之前的车辆行驶历史记录。具体而言,控制装置80取得上述的预定期间(例如,从当前时刻追溯30秒)内的第2平均车速aveV2以及第2平均驱动转矩aveTp2。更详细而言,它们为移动平均值。即,由于本子例程的处理按时间步长Δt反复执行,因此按时间步长Δt更新在基于本步骤S400的第2平均车速aveV2的计算中所使用的车速V的时间序列数据。这对于第2平均驱动转矩aveTp2也是同样的。
每个时间步长Δt的第2平均车速aveV2以及第2平均驱动转矩aveTp2的值的取得方法的例子与在实施方式2中说明了的第1平均车速aveV1以及第1平均驱动转矩aveTp1的相同。此外,从混合动力车辆的新的行程(本次的行程)的开始到上述预定期间的结束的期间内,仅通过在本次的行程开始后取得的车速V和要求驱动转矩Tp的数据无法令人满意地算出上述预定期间内的第2平均车速aveV2以及第2平均驱动转矩aveTp2。在这种期间内,也可以还使用上次的行程中的即将结束前的车速V和要求驱动转矩Tp的数据来计算第2平均车速aveV2以及第2平均驱动转矩aveTp2。然而,也可以不使用上次的行程中的数据而仅使用在本次的行程开始后所取得的数据来计算第2平均车速aveV2以及第2平均驱动转矩aveTp2。另外,计算第2平均车速aveV2以及第2平均驱动转矩aveTp2所使用的上述预定期间不一定限于相对于当前时刻的刚刚之前的期间(即,以从当前时刻追溯的方式确定的期间),也可以是以从相对于当前时刻的预定时间前的时间点起追溯的方式确定的期间。
在步骤S402之后,处理前进至步骤S404。在步骤S404中,控制装置80决定FB增益G2。具体而言,控制装置80使用上述式(18),计算与通过步骤S402的处理所取得的第2平均车速aveV2以及第2平均驱动转矩aveTp2相应的FB增益G2。之后,处理前进至步骤S406。
在步骤S406中,控制装置80计算伴随变量p(k)的校正值C(k)。此处所说的校正值C(k)相当于上述式(17)的右边第2项。因此,控制装置80计算在步骤S400中所取得的偏差ΔSOC
在步骤S408中,控制装置80按照上述式(17),使用通过步骤S406的处理计算出的校正值C(k),修正在步骤S102中所取得的伴随变量p(k)。
4-3.效果
图20的(A)以及图20的(B)是用于说明在利用为了与本发明的实施方式4的伴随变量修正处理84a进行对比所参照的伴随变量修正处理(比较例1、2)的情况下的工作的时间图。在这些比较例1和2中的伴随变量修正处理中,使用固定值作为FB增益G2。
首先,在图20的(A)所示的比较例1中,时间点t1至时间点t2的期间相当于FB增益G2(固定值)适合于该期间内的车辆的行驶方式的期间。因此,在该期间内,实际SOC轨迹良好地跟随SOC控制中心值(目标SOC轨迹)。
接着,时间点t2相当于车辆的行驶方式发生了变化的时间点。假设在时间点t2之后的期间内继续为变更后的行驶方式。而且,假设在比较例1中的时间点t2之后的期间内,由于行驶方式的变化,FB增益G2(固定值)相对于理想的FB增益G2变得过小。其结果,在比较例1中,由伴随变量修正处理进行的伴随变量p的修正不能令人满意地发挥作用,如图20的(A)所示,随着时间的经过,实际SOC轨迹逐渐向实际SOC相对于SOC控制中心值降低的一侧(即,放电侧)变化。然而,在时间点t3,实际SOC降低到需要实施强制充电的水平。另外,在实际进行了强制充电的情况下,内燃机20的燃料经济性恶化。
此外,比较例1示出因FB增益G2过小而实际SOC向放电侧发生了变化的状况。然而,根据状况,也存在因FB增益G2过小而实际SOC向充电侧变化的情况,而且,作为其结果,也存在需要实施强制放电的情况。另外,在实际进行了强制放电的情况下,由于会进行从电池44的不必要的放电,所以会导致内燃机20的燃料经济性恶化。
另一方面,在图20的(B)所示的比较例2中的时间点t2之后的期间内,由于行驶方式的变化,FB增益G2(固定值)相对于理想的FB增益G2变为过大。其结果,在比较例2中,由伴随变量修正处理进行的伴随变量p的修正过度,如图20的(B)所示,实际SOC轨迹相对于SOC控制中心值大幅地波动。其结果,发生电池44的不必要的放电/充电。这一情况可能导致内燃机20的燃料经济性恶化及电池44的劣化中的至少一方。
图21是用于说明在利用本发明的实施方式4的伴随变量修正处理84a的情况下的工作的时间图。如上所述,根据本实施方式的伴随变量修正处理84a,FB增益G2基于混合动力车辆的行驶历史记录(第2平均车速aveV2以及第2平均驱动转矩aveTp2)来设定(变更)。更详细而言,在图21中所示的时间点t2,车辆的行驶方式发生变更后,按时间步长Δt更新第2平均车速aveV2以及第2平均驱动转矩aveTp2。也即是说,行驶方式变更后的数据逐渐反映在第2平均车速aveV2以及第2平均驱动转矩aveTp2的各自的值上。
而且,随着第2平均车速aveV2以及第2平均驱动转矩aveTp2的更新,作为FB增益G2的比率ΔP/ΔSOC也逐渐更新。也即是说,逐渐进行比率ΔP/ΔSOC(FB增益G2)的学习以使得反映变更后的行驶方式。其结果,FB增益G2逐渐接近适合于变更后的行驶方式的值。此外,在图21所示的例子中,FB增益G2逐渐增大以成为适合于变更后的行驶方式的值。
根据本实施方式的伴随变量修正处理84a,如上所述,在行驶方式变更了的情况下,变更FB增益G2以使其成为适合于变更后的行驶方式的值。其结果,如图21例示的那样,即使在行驶方式变化了的情况下,也能抑制实际SOC轨迹相对于SOC控制中心值的偏离变得过大。而且,如图21所示,在FB增益G2收敛为适合于变更后的行驶方式的值之后,使实际SOC轨迹适当地收敛为SOC控制中心值。
另外,根据本实施方式的伴随变量修正处理84a,第2平均车速aveV2越高,则FB增益G2设定得越大。由此,能够考虑第2平均车速aveV2越高、则表示伴随变量p相对于SOC的灵敏度的比率ΔP/ΔSOC越高这一特性,适当地设定FB增益G2。再者,第2平均驱动转矩aveTp2越高,则FB增益G2设定得越大。由此,能够考虑第2平均驱动转矩aveTp2越高、则表示上述灵敏度的比率ΔP/ΔSOC越高这一特性,适当地设定FB增益G2。
5.其他实施方式
5-1.设定增益G1、G2所使用的行驶历史记录的其他例子
在此,列举FB增益G2为例进行说明,但以下的例子同样也能够应用于设定校正增益G1所使用的行驶历史记录。
在上述的实施方式4中,第2平均车速aveV2和第2平均驱动转矩aveTp2双方被用于FB增益G2的设定。然而,也可以替代这样的例子,将第2平均车速aveV2和第2平均驱动转矩aveTp2中的任一方用于FB增益G2的设定。另外,也可以使用预定期间内的车辆驱动输出的平均值即平均驱动输出(kW)以代替第2平均驱动转矩aveTp2(Nm)。
再者,设定FB增益G2所使用的行驶历史记录例如也可以除了第2平均车速和第2平均驱动转矩中的至少一方之外还包含平均车辆加速度。此处所说的平均车辆加速度是预定期间内的混合动力车辆的加速度的平均值,加速度不仅包括正的加速度,也包括负的加速度(减速度)。计算平均车辆加速度所使用的上述预定期间既可以与计算第2平均车速和第2平均驱动转矩中的至少一方所使用的预定期间相同,也可以不同。而且,作为一例,在除了第2平均车速aveV2以及第2平均驱动转矩aveTp2之外还使用平均车辆加速度aveA的情况下,增益(FB增益G2)也可以基于与上述的式(18)同样的考虑,例如按照以下的式(19)来决定。
另外,设定FB增益G2所使用的行驶历史记录例如也可以除了第2平均车速和第2平均驱动转矩中的至少一方之外还包含平均车辆加加速度,或者也可以除了第2平均车速和第2平均驱动转矩中的至少一方之外还包含平均车辆加速度和平均车辆加加速度。此处所说的平均车辆加加速度是预定期间内的混合动力车辆的加加速度的平均值。加加速度不仅包括正的加加速度,也包括负的加加速度。计算平均车辆加加速度所使用的上述预定期间既可以与计算第2平均车速和第2平均驱动转矩中的至少一方所使用的预定期间、以及计算平均车辆加速度所使用的预定期间相同,也可以不同。而且,作为一例,在除了第2平均车速aveV2以及第2平均驱动转矩aveTp2之外还使用平均车辆加速度aveA以及平均车辆加加速度aveJ的情况下,FB增益G2也可以基于与上述的式(18)同样的考虑,例如按照以下的式(20)来决定。
此外,上述的计算平均车辆加速度所使用的加速度也可以使用加速度传感器(G传感器)来取得。另外,计算平均车辆加加速度所使用的加加速度也可以通过用时间对加速度传感器的输出进行微分来取得,或者也可以使用加加速度传感器来取得。另外,上述的加速度及加加速度例如也可以如下这样作为基于加速器踏板的操作信息的推定值来取得。
具体而言,加速度例如也可以使用确定加速器踏板的踩踏量(或其踏力)与加速度的关系的关系信息(例如,关系式或映射)而作为与踩踏量(或踏力)相应的值来推定。另外,加加速度例如也可以使用确定加速器踏板的踩踏速度与加加速度的关系的关系信息(例如,关系式或映射)而作为与踩踏速度相应的值来推定。
5-2.动力传动系统的其他例子
在上述的实施方式1~4中,对与利用图1所示的动力分配机构34的动力分配方式的混合动力系统相当的动力传动系统10进行了说明。然而,只要成为本发明的对象的“动力传动系统”具备能够驱动混合动力车辆的内燃机及电动机、和向该电动机供给电力的电池,则不限于上述的例子。即,本发明涉及的动力传动系统例如也可以构成为将驱动车辆的内燃机与电动机并联地连结的并联方式的混合动力系统。
5-3.动力传动系统的控制输入值的其他例子
在上述的实施方式1~4中,使用发动机转速Ne及发动机转矩Te作为控制输入值u。然而,本发明涉及的最优化对象的“控制输入值”取决于动力传动系统的构成,不限于上述的例子。即,例如在具备与有级式的自动变速器组合而得到的内燃机的动力传动系统中,也可以替代发动机转速Ne而将自动变速器的档位与发动机转矩Te一起用作控制输入值。这是因为当知道所选择的档位时,可基于车速V得知发动机转速Ne。此外,在具备有级式的自动变速器的例子中,当变更档位时,发动机转速Ne不连续地(阶段性地)发生变化。因此,在搜索最优控制输入值时,也可以针对每个档位算出哈密顿量,并控制自动变速器以选择与所算出的多个哈密顿量中的最小的哈密顿量对应的档位。
关于以上所说明的各实施方式所记载的例子及其他各变形例,除了已明示的组合以外也可以在可能的范围内适当地进行组合,另外,也可以在不脱离本发明的要旨的范围内进行各种变形。
- 动力传动系统及包含有该动力传动系统的摩托车
- 一种动力总成传动系统及动力总成传动系统匹配方法