广义云驱动与辐射协同遥感影像几何精校正方法及系统
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于遥感数据预处理技术领域,涉及一种遥感影像几何精校正方法及系统,具体涉及一种广义云驱动与辐射协同下,考虑全局和局部区域,可处理广义流体的遥感影像几何精校正的方法及系统。
背景技术
遥感影像几何校正是遥感信息处理的重要内容之一。遥感影像在成像过程中,由于地球曲率和自转、地形起伏、大气折光等原因产生几何畸变,对影像变形需进行几何校正。云控制摄影测量利用已有的空间数据作为控制信息,并将其应用于影像处理过程中。
当前的几何校正方法存在以下问题:
(1)在现有的云控制方法中,几何校正仅从全局考虑了几何控制信息,未协同辐射和地物分类等属性信息对特殊的局部区域(山体和流体)进行几何精校正;
(2)传统的正射校正方法对广义流体区域(水体、投影错位但未发生真实变化的山体等)校正效果不佳。
发明内容
为了解决上述技术问题,本发明提供了一种广义云驱动与辐射协同下,考虑全局和局部区域,可处理广义流体的遥感影像几何精校正的方法及系统。
本发明的方法所采用的技术方案是:一种广义云驱动与辐射协同遥感影像几何精校正方法,包括以下步骤:
步骤1:对待校正影像,获取“云”提供的控制信息,包括DOM参考影像数据、参考影像对应的DLG矢量广义云控制线和DEM数据;
步骤2:对待校正影像进行全局几何校正;
步骤2.1:获取待校正影像与参考影像间的多元特征几何对应关系;
步骤2.2:待校正影像定位定姿;
步骤2.3:判断待校正影像是否为多视立体影像;若是,则进行空三平差;若否,则直接执行步骤2.4;
步骤2.4:待校正影像进行正射校正;
步骤3:对待校正影像进行局部几何校正;
步骤3.1:划分局部几何校正区域;
步骤3.2:利用广义云控DEM数据与DOM参考影像,协同地形属性驱动山体局部区域校正;
步骤3.3:利用DLG广义云控制线,协同辐射驱动广义流体局部区域校正。
本发明的系统采用的技术方案是:一种广义云驱动与辐射协同遥感影像几何精校正系统,包括以下模块:
模块1,用于对待校正影像,获取“云”提供的控制信息,包括DOM参考影像数据、参考影像对应的DLG矢量广义云控制线和DEM数据;
模块2,用于对待校正影像进行全局几何校正;
包括以下子模块:
模块2.1,用于获取待校正影像与参考影像间的多元特征几何对应关系;
模块2.2,用于待校正影像定位定姿;
模块2.3:判断待校正影像是否为多视立体影像;若是,则进行空三平差;若否,则直接执行模块2.4;
模块2.4,用于待校正影像进行正射校正;
模块3,用于对待校正影像进行局部几何校正;
包括以下子模块:
模块3.1,用于划分局部几何校正区域;
模块3.2,用于利用广义云控DEM数据与DOM参考影像,协同地形属性驱动山体局部区域校正;
模块3.3,用于利用DLG广义云控制线,协同辐射驱动广义流体局部区域校正。
本发明取得有益效果包括:广义云驱动与辐射协同遥感影像几何精校正方法协同几何控制信息、辐射及属性控制信息,考虑全局及局部区域空间,综合历史数据与衍生数据(目标数据再处理结果),具有信息完整性、空间(尺度)一致性、时间连续性。本发明的广义流体校正可用于处理水体和发生影像变形的山体等广义流体区域。
附图说明
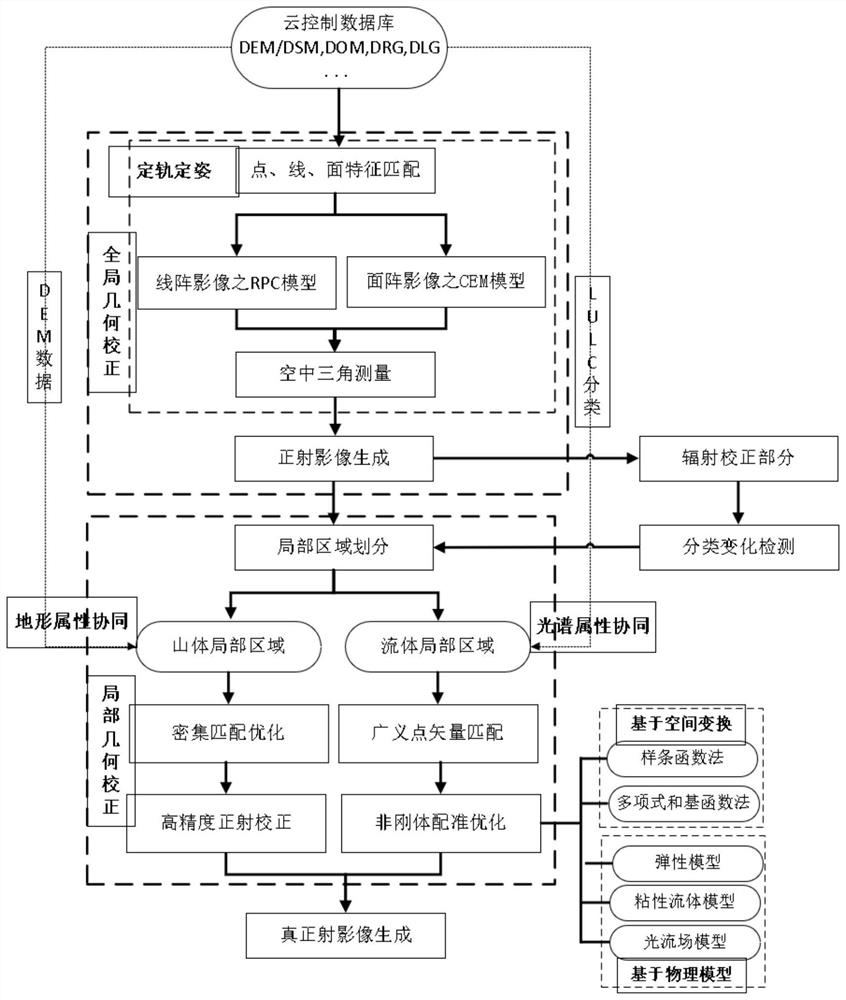
图1是本发明实施例的方法流程图。
图2是本发明实施例的山体校正示意图,(a)为影像为参考影像,(b)为影像为待校正影像,(c)为影像为经过山体校正后的结果影像。
图3是本发明实施例的广义流体校正示意图,(a)为影像为参考影像,(b)为影像为待校正影像,(c)为影像为经过广义流体校正后的结果影像。
具体实施方式
为了便于本领域普通技术人员理解和实施本发明,下面结合附图及实施例对本发明作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本发明,并不用于限定本发明。
请见图1,本发明提供的一种广义云驱动与辐射协同遥感影像几何精校正方法,包括以下步骤:
步骤1:对待校正影像,获取“云”提供的DOM参考影像数据、参考影像对应的DLG矢量广义云控制线及DEM数据作为控制信息;
步骤2:对待校正影像进行全局几何校正;
步骤2.1:获取待校正影像与参考影像间的多元特征几何对应关系。提出采用基于点的深度卷积神经网(Point-based Deep Convolutional Network,PBDCNN)同时学习训练Harris、Forstner、ASIFT、ORB、FAST、SURF、BRISK、DAISY等算子的特征点提取与匹配,从而实现待校正影像与参考影像的特征点匹配;对线特征,采用基于线的深度卷积神经网(Line-based Deep Convolutional Network,LBDCNN)学习训练LSD算子的特征线提取和匹配,将广义云控制线套合在参考影像上,采用训练好的LBDCNN匹配待校正影像的特征线与广义云中参考影像的控制线;对于面特征,将控制面转化为广义云控制线并根据上述线特征方法进一步匹配,也可以建立基于面的深度卷积神经网(Object-based DeepConvolutional Network,OBDCNN);上述过程产生的误匹配利用BaySAC(Bayesian sampleconsensus)自动剔除。
步骤2.2:待校正影像定位定姿。
将步骤2.1产生的参考影像的控制点、线、面与DEM(或DSM)数据套合,得到待校正影像的三维控制信息;然后,根据成像原理采用共线方程(CEM,Collinear EquationModel)或有理多项式(RPC,Rational Polynomial Coefficients)几何校正模型,基于广义点摄影测量原理解算对应模型中的几何参数,获得位姿信息。对求解过程中的粗差采用BaySAC进行剔除、偶然误差采用WTLS(weighted total least squares)算法、系统误差构建相机畸变模型或者傅里叶多项式进行补偿、模型误差及病态问题通过假设检验剔除过参数化系数进行控制。
步骤2.3:判断待校正影像是否为多视立体影像。
在待校正影像为多视立体影像的情况下,采用基于广义点方程的自检校光束法平差实现多张影像的联合平差优化,其中广义点方程根据特征线的角度的绝对值(大于或小于45°)选择x或者y方向一个方程,线性化展开后采用基于Levenberg-Marquardt(LM)算法的WTLS进行迭代优化;
步骤2.4:待校正影像进行正射校正。
以线阵影像为例,基于RPC的间接法进行数字微分纠正,即正射校正,校正方程如下:
其中,(x,y)为影像坐标,(P,L,H)为三维坐标,a
步骤3:对待校正影像进行局部几何校正;
步骤3.1:划分局部几何校正区域;
(1)利用广义云控数据中已有的LULC和DEM数据,将待校正影像光谱信息,通过机器学习获得待校正影像的图斑属性;然后,协同辐射属性排除前后时期图斑属性不一致的地物真实变化区域,如洪灾、大面积干旱等;
(2)提取地形不变的山体局部区域;
依据地形属性判断:
RDLS=(max(H)-min(H))×(1-P(A)/A)/500
其中,RDLS为地形起伏度,max(H)和min(H)分别为区域内的最高与最低海拔,P(A)为区域内的平地面积,A为区域总面积;
或者R(H)=max(H)-min(H)
其中,R(H)为基本单元区域H的地形起伏度,max(H)和min(H)分别为区域内最高与最低高程值;
(3)提取广义流体局部区域,对参考历史数据并排除真实变化区域后的区域进行地物分类,依据分类图斑属性提取水域等广义流体和未发生真实变化但因投影差导致影像错位的山体区域。
步骤3.2:利用广义云控DEM数据与DOM参考影像,协同地形属性驱动山体局部区域校正;
(1)采用半整体全局法(Semi-Global Matching,SGM),借助影像互信息作为匹配测度进行密集匹配;过程如下:
1、通过空三或广义云控数据获取定向几何参数;建立几何约束,校正立体像对;
2、基于物方面元进行匹配;对多视影像直接生成点云,对单像利用广义云控DOM及DEM影像作为物方控制获得三维信息;基于互信息熵,采用SGM法计算和聚合匹配代价,逐像素得到视差,进行一致性检查并获取影像同名点信息;
3、前方交会优化,生成三维点云,根据变分法再次平滑优化点云;通过滤波剔除异常点云,并沿法向量调整点云三维位置以获得更精细的高精度点云结果,构建变分法构建能量泛函数E
E
其中,P表示点云,S为物体表面,v表示向量场;E
(3)对生成的三维点云进行高精度正射校正,生成真正射影像图。
步骤3.3:利用DLG广义云控制线,协同辐射驱动广义流体局部区域校正。
(1)根据广义点法配准广义云控制线与待校正影像;经过步骤2全局几何校正后,广义云控制线与待校正影像套合;对待校正影像,采用Harris法提取特征点,采用LSD法提取特征线,并基于广义点法进行配准;
(2)对广义点配准后的残差,运用广义流体配准方法再次配准优化并完成校正;配准方法分为基于空间变换(样条函数法、多项式和基函数法)和基于物理模型(粘性流体模型、弹性模型、光流场模型)的方法,对以上方法采用RMSE均方根误差进行性能评估及优选,最后配准;
其中,k次B样条曲线表达式如下:
上式中,n阶B样条曲线包含变量u的分段多项式函数,定义了n+1个控制点,P
请见图2,为本实施例的广义流体校正中山体示意图:矢量线为广义云控制线,(a)影像为参考影像,(b)影像为待校正影像,(c)影像为经过山体校正后的结果影像。请见图2,发生投影错位但未发生真实变化的山体区域经广义流体校正后与广义云控制线更加吻合。
请见图3,为本实施例的广义流体校正中流体示意图:矢量线为广义云控制线,(a)影像为参考影像,(b)影像为待校正影像,(c)影像为经过广义流体校正后的结果影像。请见图3,流体区域经广义流体校正后与广义云控制线更加吻合。
本发明相对于现有技术,具备以下区别:
(1)已有云控制方法未考虑辐射、分类等信息,本发明的广义云控制方法协同几何控制信息、辐射及属性控制信息,考虑全局及局部区域空间,综合历史数据与衍生数据(目标数据再处理结果),提出具有信息完整性、空间(尺度)一致性、时间连续性的广义云控制遥感影像几何精校正方法。
(2)已有几何校正方法(刚性校正等)不适用于水体和发生影像变形的山体等特殊区域,本发明的广义流体校正方法可解决上述问题。
应当理解的是,上述针对较佳实施例的描述较为详细,并不能因此而认为是对本发明专利保护范围的限制,本领域的普通技术人员在本发明的启示下,在不脱离本发明权利要求所保护的范围情况下,还可以做出替换或变形,均落入本发明的保护范围之内,本发明的请求保护范围应以所附权利要求为准。
- 广义云驱动与辐射协同遥感影像几何精校正方法及系统
- 一种广义云驱动与几何协同遥感影像辐射校正方法及系统