一种3D视觉机器人及抓取探伤方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及机器人技术领域,尤其涉及一种3D视觉机器人及抓取探伤方法。
背景技术
3D视觉机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。3D视觉机器人通过3D摄像头对目标物进行拍摄转换为坐板实现定位,从而对目标物进行操作,比如金属件生产的探伤抓取。
但传统的3D视觉机器人摄像头缺乏清洁装置,在使用一段时间后,3D摄像头窗口由于灰尘堆积,影响到摄像头的拍摄功能,无法精准的定位,从而影响机器人对目标物的操作。
发明内容
本发明的目的在于提供一种3D视觉机器人,旨在解决传统的3D视觉机器人摄像头缺乏清洁装置,摄像头窗口灰尘堆积影响拍摄功能,无法精准的定位的问题。
为实现上述目的,本发明提供了一种3D视觉机器人,所述3D视觉机器人包括机器人本体、3D摄像头和清洁装置,所述机器人本体具有支架和安装板,所述支架位于所述机器人本体一侧,所述安装板位于所述支架一侧,所述3D摄像头与所述安装板固定连接,且位于所述安装板一侧,所述清洁装置包括洗涤盒、清洗管、风机、刮板和伸缩杆,所述洗涤盒与所述3D摄像头固定连接,且位于所述3D摄像头顶部,所述清洗管与所述洗涤盒固定连接,且位于所述洗涤盒靠近所述3D摄像头一侧,所述伸缩杆与所述安装板固定连接,且位于所述安装板靠近所述3D摄像头一侧,所述刮板与所述伸缩杆固定连接,且位于所述伸缩杆远离所述安装板一侧,所述风机与所述安装板固定连接,且位于所述3D摄像头一侧。
其中,所述清洁装置还包括毛刷和喷头,所述毛刷与所述刮板固定连接,且位于所述刮板靠近所述3D摄像头一侧,所述喷头与所述清洗管固定连接,且位于所述清洗管靠近所述3D摄像头一侧,通过所述喷头喷洒,使洗涤剂喷涂感觉均匀,节约洗涤剂,所述毛刷增强对所述3D摄像头清洁效果。
其中,所述清洁装置还包括密封圈和导流管,所述密封圈与所述3D摄像头固定连接,且位于所述3D摄像头靠近所述清洗管一侧,所述导流管与所述安装板固定连接,且位于所述安装板一侧,所述密封圈增强所述3D摄像头的气密性,所述导流管将使用后的洗涤剂导出所述安装板,防止洗涤剂残留腐蚀所述风机。
其中,所述技机器人本体包括机械臂、升降柱和机械抓,所述升降柱与所述机械臂固定连接,且位于所述机械臂一侧,所述机械爪与所述升降柱固定连接,且位于所述升降柱远离所述机械臂一侧,通过所述机械臂、所述升降柱和所述机械爪柜体配合实现物品的抓取。
其中,所述技机器人本体还包括主控器和探测杆,所述探测杆与与所述支架固定连接,且位于所述支架一侧,所述主控器与所述机械臂固定连接,并与所述探测杆电连接,且位于所述机械臂一侧,所述探测杆的检测装置与所述主控器电连接,实现所述探测杆探伤作业。
其中,所述机器人本体还包括探测模块和超声波检测器,所述探测模块与所述探测杆固定连接,并与所述主控器电连接,且位于所述探测杆一侧,所述超声波检测器与所述探测杆固定连接,且位于所述探测杆一侧,所述超声波检测器检测金属件,检测模块将检测结果通过所述检测杆传递给主控器。
其中,所述机器人本体还包括压力传感器和橡胶垫,所述橡胶垫与所述机械爪固定连接,且位于所述压力传感器一侧,所述压力传感器与所述机械爪固定连接,且位于所述机械爪和所述橡胶垫之间,所述压力传感器检测到压力停止夹取物品控制所述升降柱上升,所述橡胶垫保护所述压力传感器不被磨损。
其中,所述机器人本体还包括底座和转动电机,所述底座与所述机械臂固定连接,且位于所述机械臂一侧,所述转动电机与所述底座固定连接,并与所述机械臂固定连接,且位于所述机械臂和所述底座之间,所述底座增加重量防止所述机器人本体侧翻,所述转动电机将所述机械臂转动,移动所述机械爪。
第二方面,一种3D视觉机器人及抓取探伤方法,包括以下步骤;
通过探测杆上的超声波检测器检测传送带上的金属件表面,探测模块判断超声波检测器检测到不良品将信号传递到主控器;
通过3D摄像头对不良品金属件进行拍摄传递给主控器形成坐标;
通过主控器控制升降柱下降,机械爪夹紧对不良品金属件抓取,机械臂转动使升降柱和机械爪移动到不良品区域,机械爪再松开放置不良品金属件。本发明的一种3D视觉机器人,通过所述3D摄像头拍摄录像传递给所述机器人本体进行定位,所述支架和所述安装板对所述3D摄像头和所述清理组件提供支撑及安装条件。在所述3D摄像头窗口灰尘堆积,需要使用所述清理组件清理时,先通过所述清洗管往所述洗涤盒中抽取洗涤剂,所述清洗管喷涂洗涤剂在所述3D摄像头窗口上,通过所述伸缩杆来回伸缩,推动所述刮板来回在所述3D摄像头窗口移动,通过所述刮板清理所述3D摄像头窗口上的灰尘及洗涤剂,所述风机启动运行向所述3D摄像头窗口吹风,将所述刮板未刮干净的洗涤剂吹干,防止洗涤剂自然风干的过程中粘上灰尘,形成斑点影响所述3D摄像头窗口的拍摄效果,从而影响到所述机器人本体对目标件的定位。解决传统的3D视觉机器人摄像头缺乏清洁装置,摄像头窗口灰尘堆积影响拍摄功能,无法精准的定位的问题。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
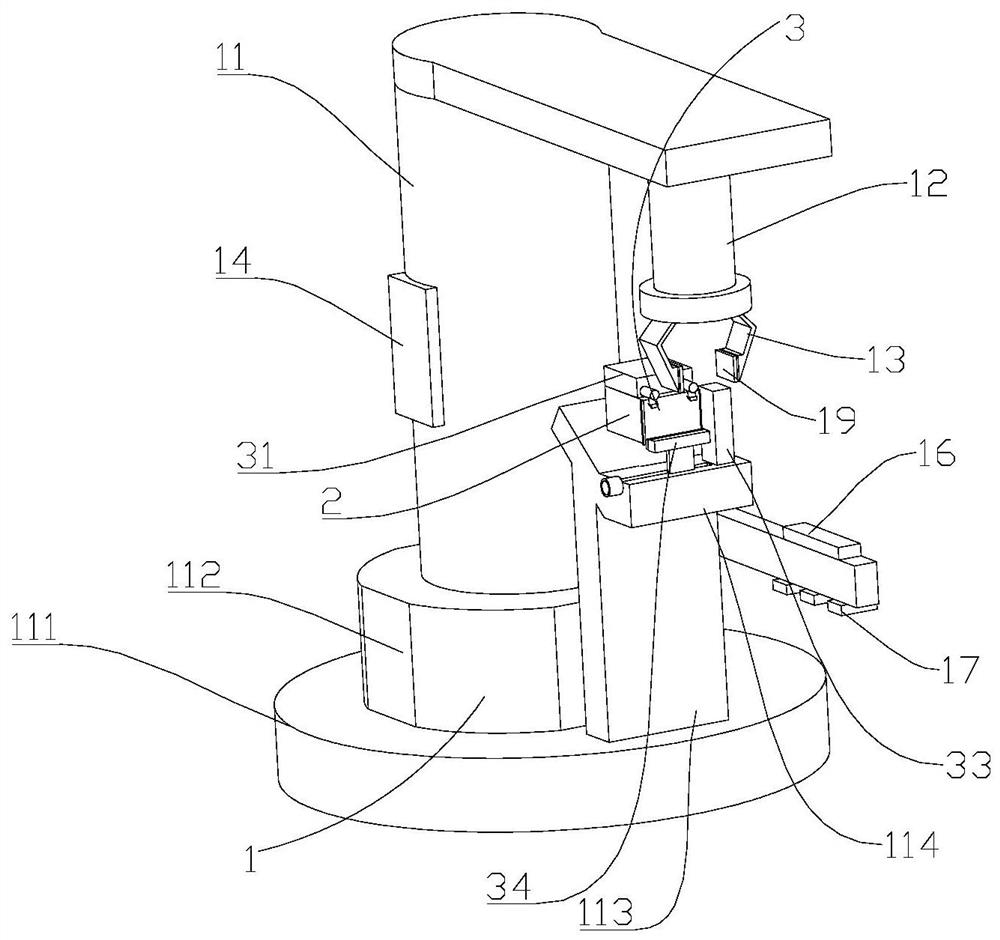
图1是本发明提供的一种3D视觉机器人的结构示意图;
图2是本发明提供的一种3D视觉机器人的侧视图;
图3是本发明提供的一种3D视觉机器人的正视图;
图4是图3的局部放大图A;
图5是本发明提供的一种3D视觉机器人抓取探伤方法的流程图。
图中:1-机器人本体、2-3D摄像头、3-清洁装置、11-机械臂、12-升降柱、13-机械抓、14-主控器、15-探测杆、16-探测模块、17-超声波检测器、18-压力传感器、19-橡胶垫、31-洗涤盒、32-清洗管、33-风机、34-刮板、35-伸缩杆、36-毛刷、37-喷头、38-密封圈、39-导流管、111-底座、112-转动电机、113-支架、114-安装板。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1至图5,本发明提供一种3D视觉机器人,所述3D视觉机器人包括机器人本体1、3D摄像头3和清洁装置3,所述机器人本体1具有支架113和安装板114,所述支架113位于所述机器人本体1一侧,所述安装板114位于所述支架113一侧,所述3D摄像头3与所述安装板114固定连接,且位于所述安装板114一侧,所述清洁装置3包括洗涤盒31、清洗管32、风机33、刮板34和伸缩杆35,所述洗涤盒31与所述3D摄像头3固定连接,且位于所述3D摄像头3顶部,所述清洗管32与所述洗涤盒31固定连接,且位于所述洗涤盒31靠近所述3D摄像头3一侧,所述伸缩杆35与所述安装板114固定连接,且位于所述安装板114靠近所述3D摄像头3一侧,所述刮板34与所述伸缩杆35固定连接,且位于所述伸缩杆35远离所述安装板114一侧,所述风机33与所述安装板114固定连接,且位于所述3D摄像头3一侧。
在本实施方式中,通过所述3D摄像头3拍摄录像传递给所述机器人本体1进行定位,所述支架113和所述安装板114对所述3D摄像头3和所述清理组件提供支撑及安装条件。在所述3D摄像头3窗口灰尘堆积,需要使用所述清理组件清理时,先通过所述清洗管32往所述洗涤盒31中抽取洗涤剂,所述清洗管32喷涂洗涤剂在所述3D摄像头3窗口上,通过所述伸缩杆35来回伸缩,推动所述刮板34来回在所述3D摄像头3窗口移动,通过所述刮板34清理所述3D摄像头3窗口上的灰尘及洗涤剂,所述风机33启动运行向所述3D摄像头3窗口吹风,将所述刮板34未刮干净的洗涤剂吹干,防止洗涤剂自然风干的过程中粘上灰尘,形成斑点影响所述3D摄像头3窗口的拍摄效果,从而影响到所述机器人本体1对目标件的定位。解决传统的3D视觉机器人摄像头缺乏清洁装置3,摄像头窗口灰尘堆积影响拍摄功能,无法精准的定位的问题。
进一步的,所述清洁装置3还包括毛刷36、喷头37、密封圈38和导流管39,所述毛刷36与所述刮板34固定连接,且位于所述刮板34靠近所述3D摄像头3一侧,所述喷头37与所述清洗管32固定连接,且位于所述清洗管32靠近所述3D摄像头3一侧,所述密封圈38与所述3D摄像头3固定连接,且位于所述3D摄像头3靠近所述清洗管32一侧,所述导流管39与所述安装板114固定连接,且位于所述安装板114一侧。
在本实施方式中,所述清洗管32抽取的洗涤剂通过所述喷头37喷洒,使洗涤剂喷涂感觉均匀,节约洗涤剂,所述毛刷36增强所述刮板34对所述3D摄像头3清洁效果,提高实用性,所述密封圈38增强所述3D摄像头3的气密性,防止洗涤剂从所述3D摄像头3窗口缝隙进入其中,引起电路故障,所述导流管39将使用后的洗涤剂导出所述安装板114,防止长时间的洗涤剂残留腐蚀所述风机33,影响所述风机33的使用寿命。
进一步的,所述技机器人本体1包括底座111、转动电机112、机械臂11、升降柱12、机械抓13、压力传感器18和橡胶垫19,所述升降柱12与所述机械臂11固定连接,且位于所述机械臂11一侧,所述机械爪13与所述升降柱12固定连接,且位于所述升降柱12远离所述机械臂11一侧,所述橡胶垫19与所述机械爪13固定连接,且位于所述压力传感器18一侧,所述压力传感器18与所述机械爪13固定连接,且位于所述机械爪13和所述橡胶垫19之间,所述底座111与所述机械臂11固定连接,且位于所述机械臂11一侧,所述转动电机112与所述底座111固定连接,并与所述机械臂11固定连接,且位于所述机械臂11和所述底座111之间。
在本实施方式中,通过所述底座111对所述机器人本体1提供支撑,同时防止所述机器人本体1侧翻,对所述支架113提供安装条件,所述机械臂11对所述升降柱12与所述机械爪13提供支撑,所述橡胶垫19保护所述压力传感器18不被抓取时磨损,所述升降柱12下降使所述机械爪13下降,所述机械爪13下降到传送带上抓取不良品金属件,所述压力传感器18为TP214G-240传感器,通过所述压力传感器18感测到压力时,所述机械爪13停止抓取金属件,所述升降柱12上升使所述机械爪13上升离开传送带,所述转动电机112转动将所述机械爪13移动到不良品放置区,所述机械爪13松开将不良品金属件放置后,所述转动电机112复位,重复上述操作。
进一步的,所述技机器人本体1还包括主控器14、探测杆15、探测模块16和超声波检测器17,所述探测杆15与与所述支架113固定连接,且位于所述支架113一侧,所述主控器14与所述机械臂11固定连接,并与所述探测杆15电连接,且位于所述机械臂11一侧,所述探测模块16与所述探测杆15固定连接,并与所述主控器14电连接,且位于所述探测杆15一侧,所述超声波检测器17与所述探测杆15固定连接,且位于所述探测杆15一侧。
在本实施方式中,通过所述探测杆15对所述探测模块16和所述超声波检测器17提供支撑及安装条件,通过所述超声波检测器17和所述探测模块16共同配合,检测传送带上的金属件表面是否存在裂痕、凹陷或凸起,较人工检测更加准确,效率更高,再通过所述探测模块16将检测结果传递给所述主控器14控制所述机器人本体1对不良品金属将抓取。
第二方面,一种3D视觉机器人及抓取探伤方法,包括以下步骤;
S101通过探测杆15上的超声波检测器17检测传送带上的金属件表面,探测模块16判断超声波检测器17检测到不良品将信号传递到主控器14;
通过所述超声波检测器17和所述探测模块16共同配合,检测传送带上的金属件表面是否存在裂痕、凹陷或凸起,较人工检测更加准确,效率更高,再通过所述探测模块16将检测结果传递给所述主控器14。
S102通过3D摄像头3对不良品金属件进行拍摄传递给主控器14形成坐标;
通过所述主控器14接收到信号的同时,所述3D摄像头3对检测到的不良品金属将进行拍摄传递回所述主控器14形成坐标位置,进行定位。
S103通过主控器14控制升降柱12下降,机械爪13夹紧对不良品金属件抓取,机械臂11转动使升降柱12和机械爪13移动到不良品区域,机械爪13再松开放置不良品金属件。
通过所述3D摄像头3进行定位后,所述主控器14控制所述升降柱12下降,使所述机械爪13下降到传送带上抓取不良品金属件,再由所述升降柱12上升将所述机械爪13和抓取的不良品提升,通过所述转动电机112转动使所述机械臂11转动,所述机械臂11转动使所述机械爪13移动到不良品放置区,所述机械爪13松开将不良品金属件放置后,所述转动电机112复位,重复上述操作再次进行抓取探伤作业。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种3D视觉机器人及抓取探伤方法
- 一种基于3D视觉的机器人智能抓取控制方法及系统