一种高精度定位方法、车载终端及系统
文献发布时间:2023-06-19 11:50:46
技术领域
本申请涉及车联网的高精度定位方式,具体涉及星历数据、差分修正数据播发等内容。
背景技术
随着无线网络和移动智能终端的发展,移动位置服务(location based service,LBS)扮演越来越重要的角色,例如基于位置的救援、导航、社交、商业等。同时,对LBS定位精度的要求也越来越高。随着车联网时代的到来,定位技术在智能驾驶领域扮演的角色越来越重要,只有获取更精确的定位信息才能更好地作出判断和决策。
现有的定位技术仍然以全球卫星导航系统(global navigation satellitesystem,GNSS)卫星定位为主。为了提高定位精度,车载终端可以采用精密单点定位(precise point positioning,PPP)技术、基于载波相位观测值的实时动态测量(real-time kinematic,RTK)技术以及惯性导航等辅助定位技术。但是这些技术存在一些问题。例如费用过高,或者因为信号遮挡等原因导致车载终端无法有效定位,导致LBS相关的服务受到很大影响。
发明内容
本申请实施例提供一种高精度定位的方法及装置,以分享可以提高定位精度的改正信息。
为达到上述目的,本申请实施例采用如下技术方案:
第一方面,提供一种高精度定位方法,该方法包括:第一车载终端通过移动网络接收来自服务器发送的第一改正信息,第一改正信息用于提高该第一车载终端的定位精度第一车载终端根据第一改正信息确定第二改正信息,该第二改正信息用于提高第二车载终端的定位精度;该第一车载终端通过V2X无线通信链路广播该第二改正信息,以使得该第二车载终端根据该第二改正信息确定高精度位置信息,该高精度位置信息包括该第二车载终端的经纬度信息。
本申请实施例中,距离第一车载终端一定范围内的第二车载终端都可以接收到改正信息,从而完成高精度位置信息的计算。这种方式的好处在于,只需要少数车辆获取高精度的改正信息,然后分享给周围的其他车辆,能有效减轻了中心站的负担,减少参考站的建设。同时,第一车载终端通过V2X广播机制,能够把改正信息在有效的传输距离上传输,能够让高价值的数据分享给多个第二车载终端使用,减少了使用成本。
在一种可能的实现方式中,服务器为RTK系统的服务器;该第一车载终端通过移动网络接收来自服务器发送的第一改正信息之前,该方法还包括:该第一车载终端接收至少四颗GNSS卫星的卫星信号;该第一车载终端根据该至少四颗GNSS卫星的卫星信号确定初始位置信息;该第一车载终端向该服务器发送该初始信息。
在另一个可能的实现方式中,该第一改正信息是该服务器根据该初始信息确定的。
在另一个可能的实现方式中,该第一改正信息包括RTK差分改正信息。
在另一个可能的实现方式中,该服务器为PPP系统的服务器,该第一改正信息包括精密星历和卫星钟差。
在另一个可能的实现方式中,该第一车载终端通过V2X无线通信链路广播该第二改正信息包括:该第一车载终端通过V2X无线通信链路周期性广播该第二改正信息。
在另一个可能的实现方式中,当该服务器为RTK系统的服务器,该第一车载终端根据第一时间间隔周期性广播该第二改正信息;当该服务器为PPP系统的服务器,该第一车载终端根据第二时间间隔周期性广播该第二改正信息,其中该第二时间间隔大于该第一时间间隔。
在另一个可能的实现方式中,该第二车载终端根据该第二改正信息确定高精度位置信息具体包括:该第二车载终端接收该第二改正信息;若该第二车载终端与该第一车载终端的距离不超过预设距离,该第二车载终端根据该第二改正信息确定高精度位置信息。
第二方面,提供一种高精度定位系统,包括第一车载终端、第二车载终端、第一服务器和第二服务器,该第一车载终端,被配置为通过移动网络接收来自该第一服务器发送的第一改正信息,该第一改正信息用于提高该第一车载终端的定位精度;根据该第一改正信息确定第二改正信息,该第二改正信息包括该第一改正信息;该第二服务器发送该第二改正信息;该第二车载终端,被配置为确定初始位置信息;向该第二服务器发送改正信息请求,该改正信息请求包括该初始位置信息;该第二服务器,被配置为接收该第二改正信息;根据该初始位置信息确定第三改正信息,该第三改正信息用于提高该第二车载终端的定位精度;向该第二车载终端发送该第三改正信息;该第二车载终端,还被配置为根据该第三改正信息确定高精度位置信息。
这种方式的好处在于,只需要少数车辆获取高精度的改正信息,然后分享给周围的其他车辆,能有效减轻了中心站的负担,减少参考站的建设。同时,第一车载终端通过V2X广播机制,能够把改正信息在有效的传输距离上传输,能够让高价值的数据分享给多个第二车载终端使用,减少了使用成本。
在一种可能的实现方式中,该第一服务器为PPP系统的服务器,该第一改正信息和该第二改正信息包括精密星历和卫星钟差。
在另一种可能的实现方式中,该第一服务器为RTK系统的服务器,该第一改正信息和该第二改正信息包括RTK差分改正信息。
在另一种可能的实现方式中,该第一车载终端还被配置为周期性向该第二服务器发送该第一改正信息。
在另一种可能的实现方式中,该根据该第三改正信息确定高精度位置信息具体包括:该第二车载终端获取第一距离,该第一距离为该第二车载终端与该第一车载终端的距离;若该第一距离小于或等于预设距离,该第二车载终端根据该第三改正信息确定高精度位置信息。
在另一种可能的实现方式中,该根据该第三改正信息确定高精度位置信息具体包括:该第二车载终端获取第一距离,该第一距离为该第二车载终端与该第一车载终端的距离;若该第一距离小于或等于预设距离,该第二车载终端根据该第三改正信息确定高精度位置信息。
第三方面,提供一种车载终端,包括通信模块,用于通过移动网络接收来自服务器发送的第一改正信息,该第一改正信息用于提高该第一车载终端的定位精度;处理单元,用于根据该第一改正信息确定第二改正信息,该第二改正信息用于提高第二车载终端的定位精度;该通信模块,还用于通过V2X无线通信链路广播该第二改正信息,以使得该第二车载终端根据该第二改正信息确定高精度位置信息,该高精度位置信息包括该第二车载终端的经纬度信息。
在一种可能的实现方式中,该服务器为RTK系统的服务器;该通信模块,还用于接收至少四颗GNSS卫星的卫星信号;该处理模块,还用于根据该至少四颗GNSS卫星的卫星信号确定初始位置信息;该通信模块,还用于向该服务器发送该初始信息。
在另一种可能的实现方式中,该第一改正信息是该服务器根据该初始信息确定的。
在另一种可能的实现方式中,该第一改正信息包括RTK差分改正信息。
在另一种可能的实现方式中,,该服务器为PPP系统的服务器,该第一改正信息包括精密星历和卫星钟差。
在另一种可能的实现方式中,该第一车载终端通过V2X无线通信链路广播该第二改正信息包括:该通讯模块,还用于通过V2X无线通信链路周期性广播该第二改正信息。
在另一种可能的实现方式中,当该服务器为RTK系统的服务器,该通信模块还用于根据第一时间间隔周期性广播该第二改正信息;当该服务器为PPP系统的服务器,该通信模块还用于根据第二时间间隔周期性广播该第二改正信息,其中该第二时间间隔大于该第一时间间隔。
第四方面,提供一种芯片,该芯片与车载终端中的存储器耦合,使得该芯片在运行时调用该存储器中存储的程序指令,使得该车载终端执行第一方面或第一方面的可能的实现方式中任一项该的方法。
第五方面,提供一种计算机存储介质,该计算机存储介质中存储有程序指令,当该程序指令在车载终端上运行时,使得电子设备执行第一方面或第一方面的可能的实现方式中任一项该的方法。
第六方面,提供一种车载装置,该车载装置包括处理器、存储器,该存储器中存储有指令;该指令被该处理器执行时,实现第一方面或第一方面的可能的实现方式中任一项该的方法。
附图说明
图1a是本申请实施例提供的一种车载终端;
图1b是本申请实施例提供的一种车载终端的一种功能框图;
图2a是本申请实施例提供的一种网络RTK技术的示意图;
图2b是本申请实施例提供的另一种网络RTK技术的示意图;
图3是本申请实施例提供的一种PPP技术的示意图;
图4是本申请实施例提供的一种高精度定位系统的示意图;
图5是本申请实施例提供的一种高精度定位方法的流程图;
图6是本申请实施例提供的另一种高精度定位系统的示意图;
图7是本申请实施例提供的另一种高精度定位方法的流程图;
图8是本申请实施例提供的一种辅助定位系统的示意图;
图9是本申请实施例提供的一种辅助定位方法的流程图;
图10是本申请实施例提供的一种车载终端的结构示意图;
图11是本申请实施例提供的一种图形用户界面的示意图;
图12是本申请实施例提供的另一种图形用户界面的示意图;
图13是本申请实施例提供的另一种图形用户界面的示意图。
具体实施方式
本申请实施例中所使用的术语只是为了描述特定实施例的目的,而并非旨在作为对本申请的限制。如在本申请的说明书和所附权利要求书中所使用的那样,单数表达形式“一个”、“一种”、“所述”、“上述”、“该”和“这一”旨在也包括复数表达形式,除非其上下文中明确地有相反指示。还应当理解,本申请中使用的术语“和/或”是指并包含一个或多个相绑定的列出项目的任何或所有可能组合。
为了下述各实施例的描述清楚简洁,首先给出相关概念或技术的简要介绍:
车载终端与其他设备通讯(vehicle-to-everything,V2X):V2X指车辆与一切事物息交互。根据实现方式的不同,V2X可以分为专用短距离通信(dedicated short rangecommunication,DSRC)和蜂窝车联网(cellular vehicle-to-everything,C-V2X)。根据业务提供方式不同,V2X又可以分为直通方式和蜂窝方式。其中,直通方式使用PC5接口,指车辆与其他终端直接通讯。蜂窝方式使用UU接口,指车辆与其他终端通过基站通讯。
GNSS:GNSS是覆盖全球的空间定位的卫星系统,允许GNSS接收机确定自身所在的位置,例如经度,纬度和高度。GNSS包括全球卫星定位系统(global positioning system,GPS),全球导航卫星系统(global navigation satellite system,GLONASS),北斗卫星导航系统(beidou navigation satellite system,BDS),准天顶卫星系统(quasi-zenithsatellite system,QZSS)等。为了描述方便,本申请实施例中的全球卫星导航系统以GPS为例。
GPS:GPS是中距离圆形轨道卫星导航系统,可以为地球表面大部分地方提供准确的定位。GNSS接收机只需接收4颗卫星的信号,就能迅速确定自身所在的位置。
差分定位:差分定位是利用相对定位原理实现的高精度的实时定位技术,包括伪距差分,载波相位差分,单参考站差分,局部区域差分,广域差分等。为方便描述,本申请实施例中,差分改正信息指差分定位技术所产生的用来提高卫星定位精度的信息。
差分全球定位系统(Differential GPS,DGNSS):DGNSS通过利用附近已知参考坐标点来修正GPS的误差,提高GPS定位的精度。
RTK:RTK定位技术是基于载波相位差分的实时动态定位技术,包括常规RTK定位技术和网络RTK技术。RTK定位技术的实现需要有参考站,参考站持续接收GNSS卫星信息,并能实时提供自身的高精度位置信息。RTK定位技术在室外空旷无遮挡环境下可以达到厘米级定位。常规RTK定位技术中,参考站持续观测GNSS卫星信息,并将观测结果传送给车载终端。车载终端根据参考站的GNSS卫星信息和自身的GNSS观测结果,采用DGNSS的算法解算自身的精确位置,精度可达到厘米级。但是当车载终端距离参考站较远时,定位精度会急剧下降,直至失效。网络RTK技术是基于常规RTK技术建立的一种定位技术。网络RTK技术的基本原理是在一个较大的区域内设置多个参考站和中心站。中心站是具有数据计算和处理能力的设备。参考站按规定持续观测GNSS卫星信息,并将观测结果发送给中心站。中心站根据车载终端发送的初始位置信息,确定差分改正信息,并发送车载终端。初始位置信息为车载终端根据卫星信号初步确定的位置信息。按照技术算法,网络RTK定位技术可以分为虚拟参考站技术(virtual reference station,VRS),主辅站技术(master-auxiliary concept,MAC),区域改正数技术(flachen korrektur parameter,FKP)等。
PPP:PPP定位技术采用单台GNSS接收机,利用国际GNSS服务组织(internationalGNSS service,IGS)或者特定厂商提供的精密星历和卫星钟差,基于载波相位观测值可实现毫米至分米级高精度定位。经过十多年的快速发展,PPP的基本理论和实践问题已经得到了比较好的解决,已在高精度测量、低轨卫星定轨、航空测量、地表形变监测等领域得到了广泛的应用。示例性的,参考图3,PPP系统的基本原理与RTK系统类似,差别在于,车载终端100只需要从中心站330下载高精度定位需要的修改正数,例如某个区域的电离层造成的误差值。流动站收到改正信息后,根据自身的定位信息,进行高精度位置计算,不需要实时上传原始的观测值给中心站。PPP系统的参考站较少,但是精度和高精度收敛时间不如RTK系统。
VRS:VRS系统中,参考站将所有信息发送给中心站。中心站根据车载终端发送的初始位置信息,确定最佳的一组参考站,根据这组参考站发送的信息,确定差分改正信息,然后将差分改正信息发送给车载终端。示例性的,图2a示出一种基于虚拟参考站技术的网络RTK技术示意图。如图2a所示,车载终端100可以通过国家海洋电子协会(national marineelectronics association,NMEA)格式向中心站330,也可以称为主控站,发送初始位置信息。中心站330可以根据车载终端100的位置信息,选择至少三个最近的参考站的观测数据。例如,如图2a所示,中心站330可以根据车载终端的位置信息、参考站341的观测数据、参考站342的观测数据和参考站343的观测数据,整体的修正GPS的轨道误差、电离层,对流层和大气折射引起的误差,将高精度的差分改正信息发送给车载终端100。这个差分改正信息的效果相当于在车载终端100旁边,生成了一个虚拟的参考基站350。这种方式解决常规RTK技术中,参考站与车载终端100的距离限制,保证了用户的精度。同时,这种方式也可以大大减少参考站的建设数量。
MAC:MAC技术中,整个GNSS参考站网络被划分为小区,每个小区包含至少两个参考站,每个小区选择一个参考站作为主站,其余参考站,以主站的整周参考值为中心,结合辅站的参考值,生成小区的差分改正信息,并由中心站广播给车载终端,由车载终端自行解算自身精确的位置信息。
连续运行卫星定位服务综合(continuously operating reference stations,CORS)系统:CORS系统是永久、连续运行的网络RTK系统,基于连续运行的参考站。CORS系统主要由各国、各地的政府、科研机构兴建。CORS系统相比于常规的网络RTK系统,不用搭建参考站,就可以随时、高精度的实现定位,且中心站的初始化时间、工作范围、可靠性均大大提高。应用范围也从测绘扩展到工业、农林、交通、地动监测、公共安全等多个领域。示例性的,图2b示出了一种CORS系统运行示意图。CORS系统包括GPS卫星210,连续运行的参考站220,服务器230,CDMA/GPRS模块240和GNSS接收单元250。其中连续运行的参考站220接收GPS卫星210发送的卫星信息,即卫星载波数据。参考站220可以通过不间断电源系统(Uninterruptible Power System)供电,实现连续运行。连续运行的参考站220根据接收到的GPS的卫星信息,确定出一个位置信息,然后发送给服务器230。当车载终端想要获取高精度定位信息,可以通过GNSS接收单元250接收GPS卫星210发送的卫星信息,然后根据接收到卫星信息先确定一个初始的位置信息,并将这个位置信息通过CDMA/GPRS模块240发送给服务器230。其中位置信息的格式可以是GGA定位信息。GGA格式为NMEA协议中的一种数据格式。服务器230接收到车载终端发送的位置信息后,可以确定基准站改正信息,并发送给车载终端的GNSS接收单元250。最后GNSS接收单元250输出高精度的定位信息。
图1a示出了本申请实施例中涉及的一种车载终端。参考图1,车载终端100为用户侧设备,设置于车辆中。车辆终端100具有定位功能,包括GNSS接收机,GNSS接收机获取卫星信息。车载终端100还用于接收差分改正信息,采用差分改正信息对GNSS接收机获取的卫星信息进行修正,得到车辆的高精度位置。高精度位置是指定位精度达到亚米级的位置信息。在本申请实施例中,车载终端可以包括:车辆所配备的智能前端设备以及独立于车辆的终端设备中的一种或者全部两种设备。其中,车辆所配备的智能前端设备在结构上集成于车辆中,属于车辆的一部分。独立于车辆的终端设备例如是手机。本申请实施例中,用于实现车载终端的功能的装置可以是车辆,也可以是能够支持车辆实现该功能的装置,例如芯片系统。本申请实施例中,芯片系统可以由芯片构成,也可以包括芯片和其他分立器件。为了描述方便,除特别说明外,本申请实施例中的车载终端均具有定位功能,可以接收卫星信号和改正信息。
图1b示出了本申请实施例中涉及的一种车载终端100的功能框图。
耦合到车辆100或包括在车辆100中的组件可包括推进系统102、传感器系统104、控制系统106、外围设备108、电源110、计算装置111以及用户接口112。计算装置111可包括处理器113和存储器114。计算装置111可以是车辆100的控制器或控制器的一部分。存储器114可包括处理器113可运行的指令115,并且还可存储地图数据116。车辆100的组件可被配置为以与彼此互连和/或与耦合到各系统的其它组件互连的方式工作。例如,电源110可向车辆100的所有组件提供电力。计算装置111可被配置为从推进系统102、传感器系统104、控制系统106和外围设备108接收数据并对它们进行控制。计算装置111可被配置为在用户接口112上生成图像的显示并从用户接口112接收输入。
在其它示例中,车辆100可包括更多、更少或不同的系统,并且每个系统可包括更多、更少或不同的组件。此外,示出的系统和组件可以按任意种的方式进行组合或划分。
推进系统102可用于车辆100提供动力运动。如图所示,推进系统102包括引擎/发动机118、能量源120、传动装置(transmission)122和车轮/轮胎124。
引擎/发动机118可以是或包括内燃机、电动机、蒸汽机和斯特林发动机等的任意组合。其它发动机和引擎也是可能的。在一些示例中,推进系统102可包括多种类型的引擎和/或发动机。例如,气电混合轿车可包括汽油发动机和电动机。其它示例是可能的。
能量源120可以是全部或部分向引擎/发动机118供能的能量的来源。也就是说,引擎/发动机118可用于为将能量源120转换为机械能。能量源120的示例包括汽油、柴油、其它基于石油的燃料、丙烷、其它基于压缩气体的燃料、乙醇、太阳能电池板、电池和其它电力来源。(一个或多个)能量源120可以额外地或可替换地包括燃料箱、电池、电容器和/或飞轮的任意组合。在一些示例中,能量源120也可以为车辆100的其它系统提供能量。
传动装置122可用于为把机械动力从引擎/发动机118传送到车轮/轮胎124。为此,传动装置122可包括变速箱、离合器、差速器、驱动轴和/或其它元件。在传动装置122包括驱动轴的示例中,驱动轴包括用于耦合到车轮/轮胎124的一个或多个轴。
车辆100的车轮/轮胎124可配置为各种形式,包括单轮车、自行车/摩托车、三轮车或者轿车/卡车四轮形式。其它车轮/轮胎形式也是可能的,诸如包括六个或更多个车轮的那些。车辆100的车轮/轮胎124可被配置为相对于其它车轮/轮胎124差速地旋转。在一些示例中,车轮/轮胎124可包括固定地附着到传动装置122的至少一个车轮和与驾驶表面接触的耦合到车轮的边缘的至少一个轮胎。车轮/轮胎124可包括金属和橡胶的任意组合,或者其它材料的组合。
推进系统102可以额外地或可替换地包括除了所示出的那些以外的组件。
传感器系统104可包括用于感测关于车辆100所位于的环境的信息的若干个传感器。如图所示,传感器系统的传感器包括GPS126、IMU(Inertial Measurement Unit,惯性测量单元)128、无线电检测和雷达测距(RADAR)单元130、激光测距(LIDAR)单元132、相机134以及用于为修改传感器的位置和/或朝向的致动器136。传感器系统104也可包括额外的传感器,包括例如监视车辆100的内部系统的传感器(例如,O2监视器、燃油量表、机油温度,等等)。传感器系统104也可以包括其它传感器。
GPS模块126可以为用于估计车辆100的地理位置的任何传感器。为此,GPS模块126可能包括收发器,基于卫星定位数据,例如全球导航卫星系统(global navigationsatellite system,GNSS),估计车辆100相对于地球的位置。在示例中,计算装置111可用于结合地图数据116使用GPS模块126来估计车辆100可在其上行驶的道路上的车道边界的位置。GPS模块126也可采取其它形式。
IMU128可以是用于基于惯性加速度及其任意组合来感测车辆100的位置和朝向变化。在一些示例中,传感器的组合可包括例如加速度计和陀螺仪。传感器的其它组合也是可能的。
RADAR单元130可以被看作物体检测系统,其用于使用无线电波来检测物体的特性,诸如物体的距离、高度、方向或速度。RADAR单元130可被配置为传送无线电波或微波脉冲,其可从波的路线中的任何物体反弹。物体可将波的一部分能量返回至接收器(例如,碟形天线或天线),该接收器也可以是RADAR单元130的一部分。RADAR单元130还可被配置为对接收到的信号(从物体反弹)执行数字信号处理,并且可被配置为识别物体。
其它类似于RADAR的系统已用在电磁波谱的其它部分上。一个示例是LIDAR(光检测和测距),其可使用来自激光的可见光,而非无线电波。
LIDAR单元132包括传感器,该传感器使用光感测或检测车辆100所位于的环境中的物体。通常,LIDAR是可通过利用光照射目标来测量到目标的距离或目标的其它属性的光学遥感技术。作为示例,LIDAR单元132可包括被配置为发射激光脉冲的激光源和/或激光扫描仪,和用于为接收激光脉冲的反射的检测器。例如,LIDAR单元132可包括由转镜反射的激光测距仪,并且以一维或二维围绕数字化场景扫描激光,从而以指定角度间隔采集距离测量值。在示例中,LIDAR单元132可包括诸如光(例如,激光)源、扫描仪和光学系统、光检测器和接收器电子器件之类的组件,以及位置和导航系统。
在示例中,LIDAR单元132可被配置为使用紫外光(UV)、可见光或红外光对物体成像,并且可用于广泛的目标,包括非金属物体。在一个示例中,窄激光波束可用于以高分辨率对物体的物理特征进行地图绘制。
在示例中,从约10微米(红外)至约250纳米(UV)的范围中的波长可被使用。光通常经由后向散射被反射。不同类型的散射被用于不同的LIDAR应用,诸如瑞利散射、米氏散射和拉曼散射以及荧光。基于不同种类的后向散射,作为示例,LIDAR可因此被称为瑞利激光RADAR、米氏LIDAR、拉曼LIDAR以及钠/铁/钾荧光LIDAR。波长的适当组合可允许例如通过寻找反射信号的强度的依赖波长的变化对物体进行远程地图绘制。
使用扫描LIDAR系统和非扫描LIDAR系统两者可实现三维(3D)成像。“3D选通观测激光RADAR(3D gated viewing laser radar)”是非扫描激光测距系统的示例,其应用脉冲激光和快速选通相机。成像LIDAR也可使用通常使用CMOS(Complementary Metal OxideSemiconductor,互补金属氧化物半导体)和CCD(Charge Coupled Device,混合互补金属氧化物半导体/电荷耦合器件)制造技术在单个芯片上构建的高速检测器阵列和调制敏感检测器阵列来执行。在这些装置中,每个像素可通过以高速解调或选通来被局部地处理,以使得阵列可被处理成表示来自相机的图像。使用此技术,可同时获取上千个像素以创建表示LIDAR单元132检测到的物体或场景的3D点云。
点云可包括3D坐标系统中的一组顶点。这些顶点例如可由X、Y、Z坐标定义,并且可表示物体的外表面。LIDAR单元132可被配置为通过测量物体的表面上的大量点来创建点云,并可将点云作为数据文件输出。作为通过LIDAR单元132的对物体的3D扫描过程的结果,点云可用于识别并可视化物体。
在一个示例中,点云可被直接渲染以可视化物体。在另一示例中,点云可通过可被称为曲面重建的过程被转换为多边形或三角形网格模型。用于将点云转换为3D曲面的示例技术可包括德洛内三角剖分、阿尔法形状和旋转球。这些技术包括在点云的现有顶点上构建三角形的网络。其它示例技术可包括将点云转换为体积距离场,以及通过移动立方体算法重建这样定义的隐式曲面。
相机134可以用于获取车辆100所位于的环境的图像的任何相机(例如,静态相机、视频相机等)。为此,相机可被配置为检测可见光,或可被配置为检测来自光谱的其它部分(诸如红外光或紫外光)的光。其它类型的相机也是可能的。相机134可以是二维检测器,或可具有三维空间范围。在一些示例中,相机134例如可以是距离检测器,其被配置为生成指示从相机134到环境中的若干点的距离的二维图像。为此,相机134可使用一种或多种距离检测技术。例如,相机134可被配置为使用结构光技术,其中车辆100利用预定光图案,诸如栅格或棋盘格图案,对环境中的物体进行照射,并且使用相机134检测从物体的预定光图案的反射。基于反射的光图案中的畸变,车辆100可被配置为检测到物体上的点的距离。预定光图案可包括红外光或其它波长的光。
致动器136例如可被配置为修改传感器的位置和/或朝向。传感器系统104可额外地或可替换地包括除了所示出的那些以外的组件。
控制系统106可被配置为控制车辆100及其组件的操作。为此,控制系统106可包括转向单元138、油门140、制动单元142、传感器融合算法144、计算机视觉系统146、导航或路线控制(pathing)系统148以及避障系统150。
转向单元138可以是被配置为调整车辆100的前进方向或方向的机构的任意组合。
油门140可以是被配置为控制引擎/发动机118的操作速度和加速度并进而控制车辆100的速度和加速度的机构的任意组合。
制动单元142可以是被配置为使车辆100减速的机构的任意组合。例如,制动单元142可使用摩擦来减慢车轮/轮胎124。作为另一示例,制动单元142可被配置为再生的(regenerative)并且将车轮/轮胎124的动能转换为电流。制动单元142也可采取其它形式。
传感器融合算法144可以包括例如计算装置111可运行的算法(或者存储算法的计算机程序产品)。传感器融合算法144可被配置为接受来自传感器104的数据作为输入。所述数据可包括例如表示在传感器系统104的传感器处感测到的信息的数据。传感器融合算法144可包括例如卡尔曼滤波器、贝叶斯网络或者另外的算法。传感器融合算法144还可被配置为基于来自传感器系统104的数据来提供各种评价,包括例如对车辆100所位于的环境中的个体物体和/或特征的评估、对具体情形的评估和/或基于特定情形的可能影响的评估。其它评价也是可能的。
计算机视觉系统146可以是被配置为处理和分析由相机134捕捉的图像以便识别车辆100所位于的环境中的物体和/或特征的任何系统,所述物体和/或特征包括例如车道信息、交通信号和障碍物。为此,计算机视觉系统146可使用物体识别算法、从运动中恢复结构(Structure from Motion,SFM)算法、视频跟踪或其它计算机视觉技术。在一些示例中,计算机视觉系统146可以额外地被配置为地图绘制环境、跟随物体、估计物体的速度,等等。
导航和路线控制系统148可以是被配置为确定车辆100的驾驶路线的任何系统。导航和路线控制系统148可以额外地被配置为在车辆100处于操作中的同时动态地更新驾驶路线。在一些示例中,导航和路线控制系统148可被配置为结合来自传感器融合算法144、GPS模块126和一个或多个预定地图的数据以便为车辆100确定驾驶路线。
避障系统150可以是被配置为识别、评估和避免或者以其它方式越过车辆100所位于的环境中的障碍物的任何系统。
控制系统106可以额外地或可替换地包括除了所示出的那些以外的组件。
外围设备108可被配置为允许车辆100与外部传感器、其它车辆和/或用户交互。为此,外围设备108可包括例如无线通信系统152、触摸屏154、麦克风156和/或扬声器158。
无线通信系统152可以是被配置为直接地或经由通信网络无线耦合至一个或多个其它车辆、传感器或其它实体的任何系统。为此,无线通信系统152可包括用于直接或通过空中接口与其它车辆、传感器或其它实体通信的天线和芯片集。芯片集或整个无线通信系统152可被布置为根据一个或多个其它类型的无线通信(例如,协议)来通信,所述无线通信诸如蓝牙、IEEE 802.11(包括任何IEEE 802.11修订版)中描述的通信协议、蜂窝技术(诸如GSM、CDMA、UMTS(Universal Mobile Telecommunications System,通用移动通信系统)、EV-DO、WiMAX、2G、3G、LTE(Long Term Evolution,长期演进)、5G、FM,NFC,IR或通用2.4G/5G无线通信技术、紫蜂、DSRC(Dedicated Short Range Communications,专用短程通信)、V2X以及RFID(Radio Frequency Identification,射频识别)通信,等等。无线通信系统152也可采取其它形式。
触摸屏154可被用户用来向车辆100输入命令。为此,触摸屏154可被配置为经由电容感测、电阻感测或者表面声波过程等等来感测用户的手指的位置和移动中的至少一者。触摸屏154可能够感测在与触摸屏表面平行或与触摸屏表面在同一平面内的方向上、在与触摸屏表面垂直的方向上或者在这两个方向上的手指移动,并且还可能够感测施加到触摸屏表面的压力的水平。触摸屏154可由一个或多个半透明或透明绝缘层和一个或多个半透明或透明导电层形成。触摸屏154也可采取其它形式。
麦克风156可被配置为从车辆100的用户接收音频(例如,声音命令或其它音频输入)。类似地,扬声器158可被配置为向车辆100的用户输出音频。
外围设备108可以额外地或可替换地包括除了所示出的那些以外的组件。
电源110可被配置为向车辆100的一些或全部组件提供电力。为此,电源110可包括例如可再充电锂离子或铅酸电池。在一些示例中,一个或多个电池组可被配置为提供电力。其它电源材料和配置也是可能的。在一些示例中,电源110和能量源120可一起实现,如一些全电动车中那样。
包括在计算装置111中的处理器113可包括一个或多个通用处理器和/或一个或多个专用处理器(例如,图像处理器、数字信号处理器等)。就处理器113包括多于一个处理器而言,这种处理器可单独工作或组合工作。计算装置111可实现基于通过用户接口112接收的输入控制车辆100的功能。
存储器114进而可包括一个或多个易失性存储组件和/或一个或多个非易失性存储组件,诸如光、磁和/或有机存储装置,并且存储器114可全部或部分与处理器113集成。存储器114可包含可由处理器113运行的指令115(例如,程序逻辑),以运行各种车辆功能,包括本文中描述的功能或方法中的任何一个。
车辆100的组件可被配置为以与在其各自的系统内部和/或外部的其它组件互连的方式工作。为此,车辆100的组件和系统可通过系统总线、网络和/或其它连接机制通信地链接在一起。
目前高精度定位技术主要应用的是RTK和PPP定位技术。服务商基于这两种定位技术,向用户提供高精度的定位服务。然而这种定位服务价格较高,也无法共享。每个用户需要单独购买高精度服务。政府建立的CORS系统也存在很多问题。例如,CORS系统还未对普通用户开放,中心站容量有限,提供高精度服务的能力有限。具体来说,采用VRS算法的CORS系统,车载终端每次定位都需要和中心站交互,用户量通常在数千级别。而采用MAC算法的CORS的用户量稍多,但是因为广播的能力有限,用户量依然受到很大的限制。政府建立的CORS系统不对一般消费者开放,仅仅对专业用户开放,其认证系统严格并且呆板,不适合移动网络的海量数据交互。此外,现有技术中,还可以通过终端与各锚点之间进行定位报文交互,得到终端的高精度定位信息。其中,锚点是指位置已知的节点。这种方式依赖定位服务器,需要额外增加定位报文。
现有定位技术大多采用卫星定位,车载终端因为卫星信号遮挡、自身天线或者电路故障等原因,可能无法有效定位,导致LBS相关的服务受到很大影响。例如车载终端在紧急呼叫时无法发送位置信息,导致用户无法得到及时营救。又例如,在V2X场景时,车载终端没有位置信息,或者位置信息不准确,会导致出现安全事故等问题。
本申请实施例提供一种高精度定位方法,车载终端通过移动网络或者卫星接收改正信息,通过V2X技术在一定范围内,向周边的车载终端发送改正信息。接收改正信息的车载终端可以使用接收到的星历数据减少首次定位时间(time to first fix,TTFF),利用差分改正信息或者修改正数提高实时位置精度,最终达到实现高精度定位的目的。每个车载终端都有可能成为中心站,这样用来提高定位精度的改正信息就可以在一定有效范围内充分共享,从而让没有高精度服务的车辆也能够享受高精度定位服务,减少使用成本。同时,这种方法也减少每个车载终端对于中心站的依赖和减少中心站的负担。此外,本申请实施例还提供一种辅助定位方法,车载终端还可以利用卫星定位原理,获取周边V2X设备的定位信息和距离信息,通过运算来得到自身的位置信息。这种方法能有效解决车辆在GNSS信号被遮挡,或者自身定位系统损坏而无法自身定位的问题。
可以理解的是,本申请实施例中,改正信息可以包括差分改正信息、修改正数、精密星历、卫星钟差等用来提高卫星定位精度的信息。本申请实施例对改正信息的具体定义不做限定。
可以理解的是,本申请实施例中,位置信息可以包括经纬度坐标,经纬度和高程坐标,空间坐标等。
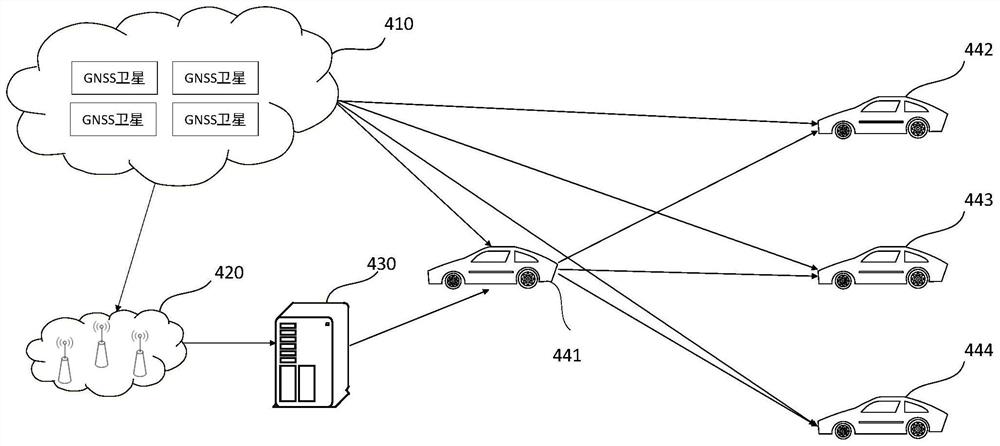
图4示出了本申请实施例所涉及的一种高精度定位系统示意图。该高精度定位系统包括GNSS卫星410,参考站420,中心站430,车载终端441,442,443和444。参考站420,中心站430,车载终端441,442,443和444都可以接收GNSS卫星410传来的卫星信息。中心站430也可以称为差分服务器或者服务器,其作用是接收参考站发送的GNSS卫星信息的观测结果,并将高精度的改正信息发送给主车。示例性的,图4所示的车载终端441为主车,车载终端442,443和444为从车。参考站420在获取卫星信息后,将观测到的卫星信息传输给中心站430。中心站430根据参考站的卫星信息,确定高精度的改正信息,并将高精度的改正信息发送给车载终端441。车载终端441接收到中心站发送的高精度的改正信息后,可以向周围的车载终端广播发送该高精度的改正信息。
结合图4,图5示出了本申请实施例提供的一种高精度定位方法的流程图。示例性的,图5所示的中心站可以是图4所示的中心站430。图5所示的第一车载终端可以是图4所示的车载终端441。图5所示的第二车载终端可以是图4所示的车载终端442,443和444中的一个或多个。
501.发送第一改正信息
中心站向第一车载终端发送第一改正信息。第一改正信息用于提高第一车载终端的定位精度。根据不同的高精度定位技术,第一改正信息可以包括不同的数据。在一些实施例中,如果采用RTK定位技术,第一改正信息可以包括差分改正信息。如果采用PPP定位技术,第一改正信息可以包括精密星历和卫星钟差。本申请实施例对第一改正信息的具体内容不做限定。中心站可以通过广播的方式向第一车载终端发送第一改正信息,也可以通过移动网络向第一车载终端发送第一改正信息。中心站可以持续向第一车载终端发送第一改正信息,也可以周期性的向第一车载终端发送第一改正信息。
示例性的,参考图4,以网络RTK技术为例。参考站420获取GNSS卫星410发送的卫星信息,将其发送至中心站430。第一车载终端根据接收到的卫星信息确定初始位置信息,然后将初始位置信息发送至中心站430。中心站430根据第一车载终端的初始位置信息,选择附近三个参考站的信息确定第一改正信息。中心站430将第一改正信息通过移动网络发送给第一车载终端。
需要说明的是,第一车载终端也可以直接从参考站获取卫星信息,再结合自身接收的卫星信息进行差分定位,从而获得高精度定位信息。
502.根据第一改正信息获得第一高精度位置信息
该步骤为可选步骤。第一车载终端获得第一改正信息后,可以根据第一改正信息,获得第一高精度位置信息。第一高精度位置信息为第一车载终端当前的位置信息。第一车载终端获得第一高精度位置信息可以参考RTK和PPP的计算方式,在此不再赘述。
参考图4,车载终端441获取中心站430发送的第一改正信息后,可以根据第一改正信息得到第一高精度位置信息,既车载终端441当前的高精度位置信息。
503.发送第二改正信息
本步骤中,第一车载终端可以向第二车载终端发送第二改正信息。第二车载终端可以使用第二改正信息提高定位精度。第二改正信息可以包括第一改正信息,第一高精度位置信息,第一车载终端获得的星历数据等。本申请实施例对第二改正信息的具体内容不做限定。
第一车载终端可以通过多种方式向第二车载终端发送第二改正信息。在一些实施例中,第一车载终端可以通过C-V2X技术,向周围的车载终端发送第二改正信息。这种方式的好处在于,第二车载终端可以快速判断第二改正信息是否有效。差分改正信息,修改正数和星历数据与第一车载终端的位置有关,有一定的有效范围。换而言之,第二车载终端接收到第二改正信息时,离第一车载终端的距离不能超过一个范围。例如,如果第二车载终端在第一车载终端方圆500米的范围内接收到第一车载终端广播的差分改正信息或者星历数据,第二车载终端根据差分改正信息数得到的定位精度可以达到亚米级,远高于未经修正的GPS定位。而如果第二车载终端与第一车载终端的距离过远,则第二车载终端无法使用第二改正信息提高自己的定位精度。由于V2X通讯链路的通讯距离有限,如果第二车载终端能接收到第一车载终端发送的第二改正信息,说明第二车载终端与第一车载终端距离不远。此时第二车载终端可以快速判断接收到的第二改正信息可以用来提高自身的定位精度。
在一些实施例中,第一车载终端可以周期性广播发送第二改正信息。例如第一车载终端可以通过V2X通讯技术周期性广播第二改正信息。周期性发送的时间间隔与参考站的覆盖有关。例如,如果采用RTK定位方式,第一车载终端可以每隔10秒发送一次第二改正信息。如果采用PPP定位方式,第一车载终端可以每隔200秒发送一次第二改正信息。时间间隔可以预先设定,也可以随时根据用户的需求调整。本申请实施例对此不做限定。第一车载终端采用广播方式发送第二改正信息的好处在于,第一车载终端不需要提前跟第二车载终端提前建立连接,可以有效减少信令交互,也能保证第二改正信息的时效性。可以理解的是,第二改正信息可以固定不变,也可以根据第一车载终端的位置变化。在另一些实施例中,第一车载终端也可以先和第二车载终端建立通讯链路,点对点发送第二改正信息。这种方式的好处在于,第二改正信息的发送会更安全。在另一些实施例中,第一车载终端也可以通过移动网络向第二车载终端发送第二改正信息。本申请实施例对发送第二改正信息的通讯网络不做限定。
示例性的,参考图4,车载终端441可以通过V2X通讯技术,广播发送第二改正信息。车载终端442,443和444在接收到第二改正信息后,可以结合自身接收到的GPS卫星信息,计算自身的高精度位置信息。示例性的,第二改正信息可以是车载终端441获取的差分改正信息和星历数据。
步骤503可以发生在步骤502之前,也可以发生在步骤502之后,也可以与步骤502同时发生,本申请实施例对此不做限定。例如,第一车载终端在获得第一改正信息后,也可以直接广播第二改正信息。此时,第二改正信息与第一改正信息相同。例如,当第一改正信息适用范围较大,例如为整个中国区域的电离层造成的误差值,第一车载终端获得第一改正信息后,可以立刻向周围广播第一改正信息,或者通过其他通信链路向第二车载终端发送第一改正信息。
示例性的,第一车载终端的用户可以选择是否发送第二改正信息。图11示出了车载终端的一种图形用户界面(graphical user interface,GUI),该GUI为车内显示屏的桌面1100。可选的,车内显示屏可以有多个,并且可以放于其他位置,比如方向盘的左侧,车窗上,车内座椅的靠背背面,也可以包括与车连接的穿戴设备,终端设备的显示屏显示。如图12所示,当第一车载终端检测到用户点击分享改正信息的图标1130后,可以通过V2X广播第二改正信息。
504.对第二改正信息进行鉴权
该步骤为可选步骤。第二车载终端接收到第二改正信息后,可以对第二改正信息进行鉴权,判断是否有权使用第二改正信息。如果鉴权成功,则第二车载终端可以执行步骤505或者步骤506。如果鉴权失败,第二车载终端可以执行步骤507。示例性的,第一车载终端可以对第二改正信息加密。只有被授权使用第二改正信息的第二车载终端,才有对应的解密功能。这种方式的好处在于,可以选择分享改正信息的第二车载终端。
参考图4,假设车载终端444获得车载终端441的授权,车载终端443和车载终端442没有获得车载终端441的授权。当车载终端441广播发送第二改正信息后,虽然车载终端442、443和444都收到了第二改正信息,但只有车载终端444能成功解码第二改正信息,并用来确定自身的高精度位置信息。
505.对第二改正信息进行有效性判断
该步骤为可选步骤。第二车载终端可以不执行步骤504,直接执行步骤505。第二车载终端也可以不执行步骤505,直接执行步骤506。
第二车载终端在获得第二改正信息后,可以对第二改正信息进行有效性判断。具体来说,第二车载终端可以判断与第一车载终端的距离是否超过预设距离。如果超过,则确定第二改正信息为无效数据,执行步骤507。如果没有,则确定第二改正信息为有效数据,执行步骤506。针对不同的高精度定位模式,可以设置不同的预设距离。例如,如果是RTK系统,预设距离可以设置为300米。如果是PPP系统,预设距离可以设置为1000米。预设距离可以根据实际需求设置,也可以由用户自行设定。
差分修正数据和星历数据都有一定的使用范围限制,如果第二车载终端距离第一车载终端超过一定距离,第二改正信息对于第二车载终端来说便是无效数据。第二车载终端无法使用第二改正信息来提高定位精度。这种方式的好处在于,可以避免第二车载终端使用无效的数据进行高精度定位信息计算。
示例性的,参考图4,假设车载终端441接收到的是RTK系统的差分改正信息,并广播该差分改正信息和星历数据。车载终端444距离车载终端441不到500米,而车载终端443和442距离车载终端441超过1000米。当车载终端442,443和444都接收到车载终端441发送的差分改正信息和星历数据,且预设距离为500米时,由于车载终端444与车载终端441的距离没有超过预设距离,车载终端444使用接收到的数据确定自身的高精度位置信息。而车载终端442和车载终端443与车载终端441的距离超过了预设距离,因此车载终端442和车载终端443不会使用接收到的数据去确定自身的高精度位置信息。
506.根据第二改正信息获得第二高精度位置信息
在一些实施例中,第二车载终端在接收到第二改正信息后,可以直接使用第二改正信息获得第二高精度位置信息。第二高精度位置信息为第二车载终端的高精度位置信息。
在另一些实施例中,第二车载终端在接收到第二改正信息后,需要先对第二改正信息进行鉴权或者有效性判断。当确定第二改正信息鉴权成功,或者是有效的,第二车载终端再根据第二改正信息获得第二高精度位置信息。
示例性的,第二车载终端的用户可以选择是否接收第二改正信息。参考图13,当第二车载终端检测到用户点击接收改正信息的图标1130后,接收第一车载终端发送的第二改正信息。
507.删除第二改正信息
如果第二改正信息是无效的数据,或者是鉴权失败的数据,第二车载终端可以删除第二改正信息。
本申请实施例中,距离第一车载终端一定范围内的第二车载终端都可以接收到改正信息,从而完成高精度位置信息的计算。这种方式的好处在于,只需要少数车辆获取高精度的改正信息,然后分享给周围的其他车辆,能有效减轻了中心站的负担,减少参考站的建设。同时,第一车载终端通过V2X广播机制,能够把改正信息在有效的传输距离上传输,能够让高价值的数据分享给多个第二车载终端使用,减少了使用成本。进一步的,本申请实施例提供的技术方案还可以通过V2X的权限机制来管理差分修正数据,有利于更多的用户使用。
图6示出了本申请实施例所涉及的另一种高精度定位系统示意图。与图4所示的高精度定位系统类似,图6所示的高精度定位系统也包括GNSS卫星410,参考站420,中心430,车载终端441,442,443和444。区别在于,图6所示的高精度定位系统还包括服务器610,用来接收车载终端441发送的改正信息。示例性的,车载终端441在接收到中心站430发送的差分改正信息后,可以根据差分改正信息获得自身的高精度位置信息。然后车载终端441可以将差分改正信息和高精度位置信息一起发送给服务器610。服务器610收到车载终端441发送的差分改正信息和高精度位置信息后,可以再发送给其他的车载终端,例如车载终端442,443和444。
结合图6,图7示出了本申请实施例提供的另一种高精度定位方法的流程图。示例性的,图7所示的中心站可以是图6所示的中心站430。图7所示的第一车载终端可以是图6所示的车载终端441。图7所示的第二车载终端可以是图6所示的车载终端442,443和444中的一个或多个。图7所示的服务器可以是图6所示的服务器610。
701.发送第一改正信息
中心站向第一车载终端发送第一改正信息。具体发送方式和第一改正信息的内容参考图5所示的步骤501,在此不再赘述。需要说明的是,中心站可以持续向第一车载终端发送第一改正信息,即实时更新最新的改正信息。
702.根据第一改正信息获得第一高精度位置信息
该步骤为可选步骤。第一车载终端获得中心站发送的第一改正信息后,可以结合自身获取的卫星信息,得到第一高精度位置信息。具体过程可以参考图5所示的步骤502,在此不再赘述。
703.发送第三改正信息
具体的,第一车载终端在获得第一改正信息后,可以确定第三改正信息,然后通过移动网络向服务器发送第三改正信息。
本申请实施例中的服务器为一种信息处理设备或装置。具体的,服务器可以为通用服务器,也可以为云服务器,还可以为一个或多个处理器等。本申请实施例对服务器的具体实现形式不作限定。其中,服务器主要用于保存第一车载终端发送的第三改正信息,以及向第二车载终端发送第四改正信息。可以理解的是,第一车载终端可以有多个,均向服务器发送第三改正信息。
第三改正信息包括高精度的改正信息,例如差分修正数据,修改正数,星历数据等数据中的一种或任意组合。例如,第三改正信息可以包括差分修正数据和星历数据,也可以只包括修改正数。在一些实施例中,第三改正信息还可以包括第一车载终端当前的位置信息。第一车载终端当前的位置信息可以是第一高精度位置信息,也可以是未经初始位置信息。这种方式的好处在于,服务器可以知道第一改正信息的有效使用范围。如上所述,第一改正信息的使用范围是有限的,并且与第一车载终端的位置有关。当第一车载终端通过移动网络服务器发送数据时,由于移动网络的通讯距离较远,服务器无法通讯距离判断第一车载终端的当前位置。换而言之,为了让服务器确定第一改正信息的有效使用范围,第一车载终端发送的第三改正信息可以包括第三改正信息对应的位置信息,即第一车载终端当前的位置信息。
在另一些实施例中,如果第一改正信息有效使用范围较大,第三改正信息可以不包括第一车载终端当前的位置信息。例如,中心站可能一次性发送整个中国区域的修改正数。
第一车载终端有多种方式向服务器发送第三改正信息。在一些实施例中,第一车载终端可以周期性的向服务器发送第三改正信息。周期性的时间间隔可以根据高精度的改正信息类型提前设置,也可以由用户自行调整。例如,如果采用RTK模式,由于差分修正数据的有效范围不大,周期性发送的时间间隔可以设置为10秒。即第一车载终端每隔10秒便向服务器发送一次最新的差分修正数据。如果采用PPP模式,则时间间隔可以设置为200秒。这种方式的好处在于,服务器可以实时收集到最新的改正信息,保证改正信息的有效性。周期性的时间间隔还可以根据第一车载终端的运动速度调整。例如,第一车载终端的运动速度越快,则时间间隔越短。
在另一些实施例中,第一车载终端也可以接收到第一改正信息,再发送第三改正信息给服务器。这种方式的好处在于,可以减少第一车载终端和服务器的负担。例如,第一车载终端可能在信号覆盖较差的公路上行驶,这种情况下,第一车载终端可能无法及时接收到中心站发送的第一改正信息。由于没有新的高精度的改正信息,第一车载终端没有必要重复给服务器发送数据。在另一些实施例中,如果服务器可以请求第一车载终端发送第三改正信息,第一车载终端接收服务器发送的请求后,再向服务器发送第三改正信息。本申请实施例对第一车载终端如何给服务器发送第三改正信息不做限定。
示例性的,参考图6,车载终端441可以周期性向服务器610发送最新的第三改正信息。其中第三改正信息可以包括修改正数和星历数据。周期性发送的时间间隔可以是200秒。
704.发送位置信息
该步骤为可选步骤。第二车载终端在接收服务器发送的第四改正信息前,可以向服务器发送自身的位置信息。
修改正数,差分修正数据和星历数据都有适用的范围。为了能得到有效的高精度的改正信息,第二车载终端可以向服务器发送自身的位置信息。服务器接收到第二车载终端发送的位置信息后,可以查找到有效区域包括该位置信息的改正信息,然后发送给第二车载终端。
705.发送第四改正信息
具体的,服务器可以通过移动网络向第二车载终端发送第四改正信息。
第四改正信息可以包括差分改正信息,星历数据,修改正数等用于提高定位精度的数据。在一些实施例中,第四改正信息还可以包括有效范围或者位置信息。例如,第一车载终端向服务器发送第一差分改正信息和第一星历数据的时候,同时发送第一高精度位置信息。这种方式的好处在于,第二车载终端接收到第四改正信息后,可以判断第四改正信息是否有效。
在一些实施例中,服务器接收到第二车载终端发送的位置信息后,根据第二车载终端的位置信息确定第四改正信息。例如,服务器可以查找到有效区域包括第二车载终端的位置的改正信息。示例性的,如图6所示,车载终端442,443和444分别向服务器610发送自己的位置信息。服务器610根据车载终端442的位置,确定车载终端442所在区域有效范围内的改正信息,例如差分改正信息和星历数据。然后服务器610将该改正信息发送给车载终端442。类似的,服务器610根据车载终端443和车载终端444的位置,分别确定车载终端443和车载终端444所在区域有效范围内的改正信息,然后分别发送给车载终端443和车载终端444。这种方式的好处在于,服务器可以针对不同位置的第二车载终端发送不同的第四改正信息。在第二车载终端较多的情况下,不需要将所有的改正信息都发送给第二车载终端,能有效减少数据发送量。
在另一些实施例中,服务器也可以周期性向第二车载终端发送第四改正信息。例如,服务器可以周期性向在中国区域的第二车载终端发送整个中国区域的修改正数。第二车载终端在接收到第四改正信息后,可以根据自身的位置信息,选择合适的改正信息进行高精度位置解算。示例性的,如图6所示,服务器610可以周期性的向车载终端442,443和444发送第四改正信息。车载终端442,443和444每次计算高精度位置时,可以使用服务器610最新发送的第四改正信息,不需要先向服务器610发送位置或者请求。这种方式可以有效减少服务器的负担。
706.对第四改正信息进行鉴权
该步骤为可选步骤。第二车载终端接收到第四改正信息后,可以对第四改正信息进行鉴权。具体过程可参考图5所示步骤504。
707.对第四改正信息进行有效性判断
该步骤为可选步骤。第二车载终端接收到第四改正信息后,可以基于自己的地理位置,判断第四改正信息是否有效。具体来说,如果第二车载终端的位置与第四改正信息所对应的位置的距离小于或者等于预设距离,则第四改正信息有效。如果第二车载终端的位置与第四改正信息所对应的位置的距离大于预设距离,则第四改正信息无效。预设距离可以提前设定,也可以由用户调整。具体方式可以参考图5所示的步骤505。
例如,在RTK模式下,第四改正信息包括差分改正信息,第二车载终端可以判断自身的位置与差分改正信息对应的位置信息是否大于300米。如果大于,则第二车载终端确定该差分改正信息无效,执行步骤709。如果没有大于,则第二车载终端确定该差分改正信息有效,执行步骤707。
708.根据第四改正信息获得第二高精度位置信息
第二车载终端根据第四改正信息获得第二高精度位置信息。第二高精度位置信息为第二车载终端的位置信息。
在一些实施例中,第二车载终端在接收到第四改正信息后,可以直接使用第四改正信息和卫星信号,获得自身的高精度位置信息。
709.删除第四改正信息
第二车载终端对第四改正信息鉴权失败,或者确定第四改正信息无效,可以删除第四改正信息。
本申请实施例的好处在于,V2X信号可能会受到干扰或者阻挡,此时从车不一定能及时接收到主车广播的改正信息。而从车通过移动网络从服务器上下载改正信息,受到干扰的可能性较低,且可以接收数据的范围较广,不必局限在主车附近的一定距离范围内。
在GNSS系统中,车载终端通过接收4颗卫星的卫星信号,就可以确定自身的位置信息。然而在一些情况下车载终端可能无法接收到卫星信号,无法确定自身的位置信息。而在车联网系统中,有大量支持V2X协议的车载终端,交管控制单元,路测单元(road sideunit,RSU)等终端设备。根据V2X协议,这些设备可以通过PC5接口直接通讯,并且在正常工作时会主动上报自己的位置信息。本申请实施例提供一种辅助定位方式,车载终端可以通过测量其他支持V2X协议的终端设备的距离,测算自身的位置信息,例如经纬度坐标或者空间坐标。
下面以车载终端801为例,对本申请实施例车载终端辅助定位的方法进行详细介绍。如图9所示,为本申请实施例车载终端辅助定位的方法的流程示意图。具体包括以下步骤。
901.获取终端设备的位置信息
具体的,车载终端801可以通过V2X协议获取周边终端设备的位置信息。其中,终端设备可以是车载终端,也可以是非车载终端。非车载终端包括交管控制单元或者路测单元。位置信息可以包括经纬度坐标,空间坐标等,也可以包括二维坐标、三维坐标等。本申请实施例对位置信息的具体表现形式不做限定。具体的,车载终端801可以通过V2X协议中的PC5接口,获取周边终端设备的位置信息。例如,参考图8,车载终端802,803,804可以通过接收到的卫星信号确定自身的位置信息。车载终端801通过V2X技术获取车载终端802,803和804的位置信息。
车载终端801根据需要确定的位置信息类型和计算方式,决定获取位置信息的终端设备的数量。例如,如果车载终端801要确定空间坐标,至少需要获取三个终端设备的位置信息。为了提高精度,车载终端801也可以获取四个或者四个以上的终端设备的位置信息,用来确定空间坐标。如果车载终端801需要确定二维坐标,则车载终端801至少需要获取终端设备的位置信息。类似的,如果要获取精度较高的二维坐标,车载终端801至少需要获得三个终端设备的数据。理解的是,车载终端801可以获取较多的终端设备的位置信息,然后从中选出质量较好的位置信息,用于确定自身的位置信息。
902.获取终端设备的距离信息
车载终端801获取周边终端设备的距离信息,其中,距离信息为车载终端801与终端设备的距离。在一些实施例中,车载终端801可以先执行步骤901,获取终端设备的位置信息,然后获取这些终端设备的距离信息。例如,车载终端801先获取终端设备1,终端设备2和终端设备3的位置信息,再获取终端设备1,终端设备2和终端设备3的距离信息。在另一些实施例中,车载终端801可以先执行步骤902,再执行步骤901。在另一些实施例中,步骤901和步骤902也可以同时进行,例如车载终端801可以同时获取终端设备1的位置信息和距离信息,然后再获取终端设备2的位置信息和距离信息。本申请实施例对此不做限定。
车载终端801可以通过多种方式获取其他终端设备的距离信息。在一些实施例中,车载终端可以通过测距设备获得距离信息。测距设备可以包括超声波测距,毫米波雷达测距,激光测距,摄像系统测距或者红外测距。
在另一些实施例中,车载终端801可以先收集接收信号强度(received signalstrength indication,RSSI)与距离信息,确定RSSI与距离信息的对应信息。然后车载终端801可以根据测量的RSSI和对应信息确定与其他终端设备的距离信息。
具体的,在GNSS信号良好的情况下,车载终端801接收到某个终端设备的信号后,可以同时记录测量的RSSI和距离信息。例如,参考图8,车载终端801在接收到车载终端803发送的信号后,可以测量RSSI。由于车载终端803支持V2X协议,在正常工作的情况会上报自身的位置信息,因此车载终端801根据自身的位置信息和车载终端803上报的位置信息确定距离信息。车载终端801将RSSI和距离信息一起记录下来。
车载终端801在获取到一定数量的RSSI和距离信息后,可以建立基于本车RSSI和距离信息的对应信息。示例性的,在本申请实施例中,RSSI和距离信息的关系信息如表1所示:
表1
需要说明的是,表1中所示的对应信息仅为示意性举例,其中,对应信息实际上记录的是RSSI数值与对应的距离信息。例如,表1中的,RSSI为-60dBm时,其对应的距离信息为30m。RSSI为-90dBm时,其对应的距离信息为350m。本申请对对应信息中,RSSI与距离信息的对应关系的记录方式和参数的标识方式不做限定。
当车载终端801需要获得其他终端设备的距离信息,可以根据其他终端设备发送的信号,测量RSSI,然后根据RSSI和关联信息确定与其他终端设备的距离信息。示例性的,如图8所示,车载终端801根据车载终端803发送的信号,测量RSSI的数值为-91dBm,然后根据表1确定对应的距离信息为152m。换而言之,车载终端801可以确定与车载终端803的距离为152m。
在另一些实施例中,车载终端801还可以通过LTE-V技术发射不同频率的信号,通过测量相位误差或者根据多普勒频移来计算与其他终端设备的距离。
本申请实施例对车载终端801获得与其他终端设备的距离信息的方式不做限定。
903.确定用于确定车载终端位置信息的位置信息和距离信息
该步骤为可选步骤。如果车载终端801获得较多终端设备的位置信息和距离信息,可以选择质量较好的位置信息和对应的距离信息,用于计算自身的位置信息
在一些实施例中,车载终端801可以通过算法选择信号较强,相对位置关系较好,预估残差最小的位置信息。在另一些实施例中,车载终端801也可以选择多组位置信息用于确定自身位置信息的904.确定车载终端的位置信息
车载终端801根据之前获取的终端设备的位置信息和距离信息,确定自身的位置信息。具体的,车载终端801可以结合位置信息和对应的距离信息,建立方程组,从而确定车载终端801的位置信息。
示例性的,若待确定的车载终端801的位置信息为(x,y,z),可以根据车载终端801之前获取的3个位置信息和对应的距离信息,通过下列方程组确定。
(x-x
(x-x
(x-x
其中,位置信息(x
又示例的,若待确定的车载终端801的位置信息为(x,y,z),可以根据车载终端801之前获取的4个位置信息和对应的距离信息,通过下列方程组确定。
(x-x
(x-x
(x-x
(x-x
其中,位置信息(x
又示例的,若待确定的车载终端801的位置信息为(x,y),可以根据车载终端801之前获取的2个位置信息和对应的距离信息,通过下列方程组确定。
(x-x
(x-x
其中,位置信息(x
本申请实施例提供的一种辅助定位方式,车载终端可以通过V2X技术获取周边终端设备的位置信息和距离信息,确定自身的位置信息。这种方式的好处在于,车载终端在无法根据卫星信号确定位置信息的时候,可以通过其他终端设备的位置信息和距离信息,确定自身的位置信息。随着V2X技术的发展,这种辅助定位方式的精度可以达到厘米级。
上述各个实施例可以单独使用,也可以相互结合使用,以实现不同的技术效果。
上述本申请提供的实施例中,从车载终端和服务器作为执行主体的角度对本申请实施例提供的方法进行了介绍。为了实现上述本申请实施例提供的方法中的各功能,车载终端或服务器可以包括硬件结构和/或软件模块,以硬件结构、软件模块、或硬件结构加软件模块的形式来实现上述各功能。上述各功能中的某个功能以硬件结构、软件模块、还是硬件结构加软件模块的方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
本申请实施例可以根据上述方法示例对车载终端和服务器进行功能模块的划分,例如,可以对应每一个功能划分每一个功能模块,也可以将两个或两个以上的功能集成在一个处理模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。需要说明的是,本申请实施例中对模块的划分是示意性的,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式。下面以采用对应每一个功能划分每一个功能模块为例进行说明:
图10为本申请实施例提供的一种车载终端的结构示意图。该车载终端包括处理模块1001和通信模块1002。其中,处理模块1001用于支持车载终端执行图5中的步骤502,步骤504,步骤505,步骤506和步骤507,图7中的步骤702,步骤706,步骤707,步骤708和步骤709,图9中的步骤903和步骤904。通信模块1002用于支持车载终端执行图5中的步骤501和步骤503,图7中的步骤701,步骤703,步骤704和步骤705。
作为一个示例,图10中的处理模块1001可以由图1b中的处理器113来实现,图10中的通信模块1002可以由图2中的全球定位系统模块126结合无线通信系统152来实现,本申请实施例不限于此。
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机指令;当所述计算机可读存储介质在计算机上运行时,使得该计算机执行本申请实施例所提供的方法。
本申请实施例还提供了一种包含计算机指令的计算机程序产品,当其在计算机上运行时,使得计算机可以执行本申请实施例提供的方法。
本申请实施例提供一种芯片,该芯片包括处理器,该处理器执行指令时,使得该芯片可以执行本申请实施例提供的方法。
本领域普通技术人员可以理解:在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。
所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(Digital SubscriberLine,DSL))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包括一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,数字视频光盘(Digital Video Disc,DVD))、或者半导体介质(例如固态硬盘(Solid State Disk,SSD))等。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个设备上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个功能单元独立存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。
通过以上的实施方式的描述,所属领域的技术人员可以清楚地了解到本申请可借助软件加必需的通用硬件的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在可读取的存储介质中,如计算机的软盘,硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本申请各个实施例所述的方法。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,在本申请揭露的技术范围内的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
- 一种高精度定位方法、车载终端及系统
- 基于高精度室内定位系统的车载终端