定位装置、刚度减小装置和电子束设备
文献发布时间:2023-06-19 12:02:28
本申请要求于2018年12月21日提交的EP申请18215161.3的优先权,该申请通过引用以其整体并入本文。
技术领域
本发明涉及定位装置、刚度减小装置和电子束(e-beam)设备。
背景技术
定位装置可以被用于对在处理工具(例如,电子束检查工具)内部的物体(例如,衬底)进行定位。在一个实施例中,定位装置包括用于支撑物体的可移动平台。致动器可以被提供用于在水平移动方向上,例如相对于基准物来移动平台并且移动其上支撑的物体。平衡质量块可以被布置在基准物和致动器之间。这样的平衡质量块可以被提供来减少从致动器到基准物的反作用力传递。平衡质量块可以利用在平衡质量块和基准物之间布置的支撑装置而被支撑在基准物上。
平衡质量块通常在与平台的移动相对的移动方向上移动。这意味着当平台例如沿水平方向在正方向上移动时,平衡质量块将沿相同的水平方向的负方向移动。此外,平衡质量块通常具有显著高于平台的重量的重量,例如可以应用5:1的重量比。由于该重量差,平衡质量块和平台在移动方向上的位移之间将存在相反的比率,导致与平台相比平衡质量块的位移较小,同时仍然减少了到基准物的反作用力传递。例如,平衡质量块和平台之间5:1的重量比将导致移动方向上的1:5的位移比。
用于支撑平衡质量块的支撑装置可以包括在基准物和平衡质量块之间布置的多个板簧。在平衡质量块的正常操作期间,板簧在竖直方向上提供足够的刚度,以在竖直方向上支撑平衡质量块来克服重力。板簧还被设计为在平台的水平移动方向上具有相对较低的刚度,以减少板簧在平衡质量块的移动方向上由板簧的刚度引起的干扰效应。然而,实际上,在移动方向上的这种相对低的刚度可能仍然具有对定位装置的性能具有负面影响的刚度值。
此外,由于在定位装置的正常操作期间发生的板簧材料的应力和疲劳,板簧的可实现行程可能受到限制。尽管该应力和疲劳可以通过减轻平衡质量块的重量来减少,但是平衡质量块的这种重量减轻将导致平衡质量块需要更大的行程来跟随平台的移动。较大的行程本身也可能导致较高的应力和潜在的疲劳问题。
发明内容
本发明的一个目的是提供具有平衡质量块的定位装置,平衡质量块在定位装置的平台的移动方向上具有减小的有效刚度。
在一个实施例中,提供了被配置为使物体移位的定位装置,包括:
用于支撑物体的平台,
致动器,用于在移动方向上相对于基准物移动平台,
平衡质量块,被布置在致动器和基准物之间,用于减少从致动器到基准物的反作用力传递,
支撑装置,被布置在基准物和平衡质量块之间的,用于支撑平衡质量块,以及
重力补偿器,作用在基准物和平衡质量块之间,用于在平衡质量块上施加提升力,以减少要由支撑装置提供的用于支撑平衡质量块的重力支撑力。
根据本发明的一个方面,提供了用于使物体移位的定位装置,包括:
用于支撑物体的平台,
致动器,用于在移动方向上相对于基准物移动平台,
平衡质量块,被布置在致动器和基准物之间,用于减少从致动器到基准物的反作用力传递,
支撑装置,被布置在基准物和平衡质量块之间,支撑装置在移动方向上具有第一刚度,以及
刚度减小装置,作用在基准物和平衡质量块之间,刚度减小装置在移动方向上提供第二刚度,其中第二刚度是至少部分地抵消第一刚度的负刚度。
在另一实施例中,提供了刚度减小装置,该刚度减小装置用于减小布置在平衡质量块和基准物之间的支撑装置的第一刚度,以允许在移动方向上,在平衡质量块和基准物之间移动,其中刚度减小装置在移动方向上提供第二刚度,其中第二刚度是至少部分地抵消第一刚度的负刚度。
在一个实施例中,提供了电子束设备,包括:
根据权利要求1至32中任一项所述的定位装置,其中定位装置被配置为使物体相对于由电子光学系统生成的电子束移位。
在一个实施例中,提供了设备,该设备包括真空室以及根据权利要求1至32中任一项所述的定位装置,其中定位装置被布置在真空室中。
附图说明
通过以下结合附图的详细描述将容易理解本发明,其中相同的附图标记表示相同的结构元件,其中:
图1A和图1B是根据本发明的一个实施例的电子束检查工具的示意图;
图2和图3是在本发明的一个实施例中可以应用的电子光学系统的示意图;
图4示意性地描绘了已知定位装置的一个实施例;
图5示意性地描绘了根据本发明的一个方面的定位装置的第一实施例;
图6示意性地描绘了根据本发明的一个方面的磁重力补偿器的一个实施例的磁体组件;
图7a示意性地描绘了根据本发明的一个方面的定位装置的第二实施例,定位装置并入了图6的磁重力补偿器;
图7b示意性地描绘了根据本发明的一个方面的定位装置的第二实施例的变型;
图7c示意性地描绘了磁屏蔽件的一个实施例;
图8示意性地描绘了根据本发明的一个方面的定位装置的第三实施例;
图9示意性地描绘了图8的定位装置的刚度减小装置的截面的俯视图;
图10示意性地描绘了图8的定位装置的刚度减小装置的截面的俯视图;
图11示意性地描绘了图8的实施例的板簧和刚度减小装置的刚度分布图;
图12示意性地描绘了根据本发明的一个方面的定位装置的第四实施例;
图13示意性地描绘了图12的定位装置的刚度减小装置和磁重力补偿器的俯视图;
图14示意性地描绘了根据本发明的一个方面的定位装置的第四实施例;
图15示意性地描绘了图14的磁重力补偿器的一个实施例的细节;以及
图16示意性地描绘了图14的磁重力补偿器的一个备选实施例的细节。
虽然本发明易于进行各种修改和备选形式,但是其特定实施例在附图中以示例的方式示出并且可以在本文中详细描述。附图可能未按比例绘制。然而,应当理解,附图及其详细描述并非旨在将本发明限制为所公开的特定形式,而是相反,其目的在于涵盖落入如所附权利要求书所限定的本发明的精神和范围内的所有修改、等同物和备选方案。
具体实施方式
现在将参考其中示出本发明的一些示例实施例的附图来更全面地描述本发明的各种示例实施例。本文中公开的具体结构和功能细节仅表示描述本发明的示例实施例的目的。然而,本发明可以以多种备选形式体现并且不应被解释为仅限于本文中阐述的实施例。
因此,虽然本发明的示例实施例能够进行各种修改和备选形式,但是其实施例在附图中以示例的方式示出并且将在本文中详细描述。然而,应当理解,无意将本发明的示例实施例限制为所公开的特定形式,而是相反,本发明的示例实施例涵盖落入本发明范围内的所有修改、等同物和备选方案。贯穿附图的描述,相同的附图标记指代相同的元件。
如本文所使用的,术语“样本”通常指代晶片或者感兴趣的缺陷(DOI)可能所处的任何其他样本。尽管术语“样本”和“样品”在本文中可互换使用,但是应理解,本文关于晶片描述的实施例可以被配置和/或用于任何其他样本(例如,掩模版、掩模或光掩模)。
如本文所使用的,术语“晶片”通常指代由半导体或非半导体材料形成的衬底。这样的半导体或非半导体材料的示例包括但不限于单晶硅、砷化镓和磷化铟。这样的衬底通常可以在半导体制造设施中找到和/或进行加工。
在本发明中,“轴向”是指“在设备、装置列或诸如透镜的装置的光轴方向上”,而“径向”是指“在垂直于光轴的方向上”。通常,光轴从阴极开始,到样本结束。在所有图中,光轴总是指代z轴。
术语交叉指代电子束聚焦的点。
术语虚拟源是指从阴极发射的电子束可以被追溯到“虚拟”源。
根据本发明的检查工具涉及带电粒子源,具体地涉及可以应用于SEM、电子束检查工具或电子束直写器(进一步还可以被称为EBDW)的电子束源。在本领域中,电子束源还可以被称为e-gun或者电子枪。
关于附图,请注意,这些附图未按比例绘制。具体地,附图中的一些元件的比例可能被极大地夸大来强调元件的特性。例如,为了清楚起见,层和区域的厚度可以被夸大。还应注意,图未按相同比例绘制。已使用相同的附图标记指示了在多于一个附图中示出的可以类似配置的元件。
在附图中,为了清楚起见,每个部件的相对尺寸以及每个部件之间的相对尺寸可能被夸大。在以下对附图的描述中,相同或相似的附图标记指代相同或相似的部件或实体,并且仅描述关于各个实施例的不同之处。
图1A和图1B示意性地描绘了根据本发明的一个实施例的电子束(e-beam)检查(进一步还被称为EBI)系统100的俯视图和截面图。所示的实施例包括外壳110、用作接口来接收待检查物体并且输出已检查物体的装载端口对120。如图所示的实施例还包括被指示为设备前端模块130(进一步还被称为EFEM)的物体传送系统,物体传送系统被配置为将物体搬运和/或运输到装载端口以及从装载端口搬运和/或运输物体。在如图所示的实施例中,EFEM 130包括搬运机器人140,搬运机器人140被配置为在装载端口和EBI系统100的装载锁150之间运输物体。装载锁150是在外壳110外部和EFEM中发生的大气条件与在EBI系统100的真空室160中发生的真空条件之间的接口。在如图所示的实施例中,真空室160包括电子光学系统170,电子光学系统170被配置为将电子束投射到待检查的物体(例如,半导体衬底或晶片)上。EBI系统100还包括定位装置180,定位装置180被配置为使物体190相对于由电子光学系统170生成的电子束移位。
在一个实施例中,定位装置可以包括多个定位器的级联布置,多个定位器诸如是用于在正常操作期间在基本水平的平面中定位物体的X-Y平台以及用于在正常操作期间在竖直方向上定位物体的Z平台。
在一个实施例中,定位装置可以包括粗略定位器和精细定位器的组合,粗略定位器被配置为在相对大的距离上提供物体的粗略定位,精细定位器被配置为在相对小的距离上提供物体的精细定位。
在一个实施例中,定位装置180还包括用于在EBI系统100执行的检查过程期间保持物体的物体台。在这样的实施例中,物体190可以借助夹具(诸如静电夹具)而被夹持到物体台上。这样的夹具可以被集成在物体台中。
根据本发明,定位装置180包括用于对物体台进行定位的第一定位器以及用于对第一定位器和物体台进行定位的第二定位器。
图2示意性地描绘了可以应用于根据本发明的电子束检查工具或系统的电子光学系统200的一个实施例。电子光学系统200包括还被称为电子枪210的电子束源和成像系统240。
电子枪210包括电子源212、抑制器214、阳极216、孔径集合218和聚束器220。电子源212可以是例如肖特基发射器。更具体地,电子源212包括陶瓷衬底、两个电极、钨丝和钨针。两个电极被平行固定到陶瓷衬底,并且两个电极的另一侧被分别连接到钨丝的两个端部。钨被稍微弯曲来形成用于放置钨针的尖端。接着,ZrO2被涂覆在钨针的表面上,并且被加热到1300℃,使其熔融并覆盖钨针,但不覆盖钨针的针尖。熔融的ZrO2减小了钨的功函数,并且降低了所发射的电子的能量势垒,并且因此使得能够更高效地发射电子束202。然后,通过向抑制器214施加负电压,电子束202被抑制。因此,具有大发散角的电子束被抑制为初级电子束202,并且因此电子束202的亮度被增强。通过阳极216的正电荷,电子束202可以被提取,并且然后电子束202的库仑强制力可以通过使用具有不同孔径尺寸的可调孔径218来控制,以消除孔径外部不需要的电子束。为了会聚电子束202,聚束器220被应用于电子束202,聚束器220还提供放大。图2中所示的聚束器220可以是例如能够会聚电子束202的静电透镜。另一方面,聚束器220还可以是磁透镜。
如图3所示的成像系统240包括消隐器248、孔径集合242、检测器244、四个偏转器集合250、252、254和256、线圈对262、轭260、过滤器246和电极270。电极270被用于延迟和偏转电子束202,并且由于上极片和样本300的组合而还具有静电透镜功能。此外,线圈262和轭260构成磁物镜。
为了创建相对稳定的电子束202,电子源通常在相对长的时间段期间被加热。为了避免电子在该稳定时间段期间撞击任何样本,消隐器248被施加到电子束202,以将电子束202临时偏转远离样本。
偏转器250和256被应用以扫描电子束202来获得相对大的视场,并且偏转器252和254被用于扫描电子束202来获得相对小的视场。所有偏转器250、252、254和256可以控制电子束202的扫描方向。偏转器250、252、254和256可以是静电偏转器或磁偏转器。在正常操作期间,轭260的开口面向样本300,这将磁场浸入样本300中。
由于使用电子束202来照射样本300,次级电子从样本300的表面出现,次级电子可以被过滤器246引导至检测器244。
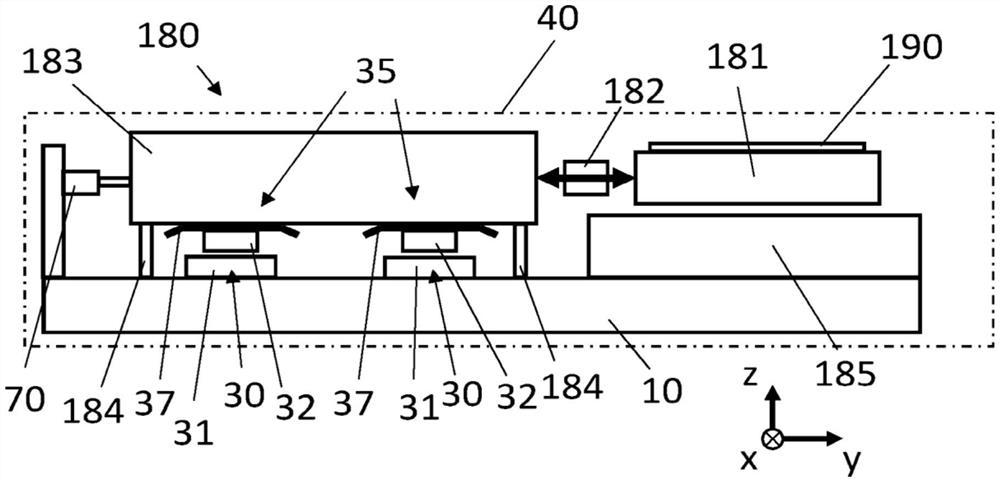
图4示意性地描绘了定位装置180的一个实施例。该定位装置180包括平台181,平台181被布置为支撑物体190,例如衬底或晶片。致动器182被提供,以在水平移动方向y上相对于基准物10移动平台181并随之移动物体190。
平台181由线性或平面轴承185(例如,具有永磁体或电磁体的磁轴承、空气轴承或滚动轴承)支撑。在移动方向y上没有刚度或者具有相对非常低的刚度的情况下,平面轴承185在竖直方向(z方向)上支撑平台181。
平衡质量块183被布置在致动器182和基准物10之间,以减少从致动器182到基准物10的反作用力传递。基准物10是例如框架,诸如电子束检查工具100的基部框架或者量测框架。
当平台181被致动器182致动以在正y方向上(例如,向图4中的右侧)移动平台181时,平衡质量块183将由于致动器182的反作用力而在负y方向上(例如,向图4中的左侧)移动。通常,平衡质量块183的重量显著大于平台181的重量,例如重量比为5:1。由于这种重量差,平衡质量块183在负y方向上的位移将显著小于平台181在正y方向上的位移。例如,当平衡质量块183的重量和平台181的重量之间的重量比为5:1时,平衡质量块183的位移和平台181的位移之间的位移比将为1:5。
平衡质量块183由支撑系统支撑,支撑系统包括在基准物10和平衡质量块183之间的多个板簧184。多个板簧184是弹性引导装置,被构造为在竖直z方向上支撑平衡质量块50,即,多个板簧184提供重力支撑力来抵消施加在平衡质量块183上的重力。为了在正常操作期间,在竖直z方向上提供提升力,板簧184在竖直方向上具有合适的刚度。
为了适应平衡质量块183在移动方向y上的移动,板簧184应允许平衡质量块183在移动方向y上的位移。板簧184还被设计为在平衡质量块18的移动方向y上具有相对低的刚度。板簧184在水平移动方向上的该相对低的刚度被提供,以在到框架10的移动方向上传递致动器182的最小反作用力。然而,为了承载平衡质量块183的重量,板簧184必须在移动方向y上具有一定的刚度,以稳定地支撑平衡质量块183。
y方向上的刚度乘以移动方向y上的位移产生平衡质量块183上的静态干扰力。平衡质量块致动器70可以被提供,以在需要时将平衡质量块183保持在移动范围内的位置中,特别是以防止平衡质量块183由于板簧184的该静态干扰力而返回到中心位置。平衡质量块致动器70通常是在平衡质量块183的移动方向y上没有刚度或具有非常低的刚度的致动器,例如,洛伦兹致动器。
当平衡质量块183的重量减小时,板簧184在y方向上的刚度可以被降低。然而,平衡质量块183的该减小的重量将需要更大的位移来响应平台181的位移。因此,更大的行程还将导致板簧184中的更高应力和潜在疲劳。
鉴于上述情况,期望在不需要减小平衡质量块183的重量的情况下,在平衡质量块183的移动方向上降低平衡质量块183的支撑装置的有效刚度。
图5示出了根据本发明的一个实施例的定位装置180的第一实施例。在图5的定位装置180中,提供了两个重力补偿器20。重力补偿器20被配置为减少必须由板簧184支撑的平衡质量块183的重量。图5的定位装置180的重力补偿器20是机械重力补偿器20,机械重力补偿器20包括布置在基准物10和平衡质量块183之间的弹簧21。弹簧21在竖直方向上延伸。每个弹簧21的上端部在枢纽22处被连接到基准物10,具体是基准物10的位于比平衡质量块183更高的层级处的部分。每个弹簧21的下端部在枢纽23处被连接到平衡质量块183。弹簧21被预张紧,以在竖直向上的方向(即,在正z方向)上拉动平衡质量块183。由于弹簧21在竖直向上的方向上施加的拉力,提升力被施加在平衡质量块上,结果是必须由板簧184承载的平衡质量块183的重量被显著减少,同时保持了平衡质量块183的总质量。
因此,稳定地支撑平衡质量块183所需的板簧184的最低竖直刚度显著低于图4的实施例中所需的竖直刚度,并且因此,板簧184可以被设计为在竖直方向上提供较低的刚度。因此,板簧184在平衡质量块183的移动方向y上的刚度也可以较低。板簧184在平衡质量块183的移动方向上的该较低的刚度为平衡质量块183响应于平台181的致动的移动提供了更大的灵活性,并且使得较少的反作用力从致动器182传递到基准物10。由于平衡质量块183的重量可以与图4的实施例相同,所以不必增加跟随平台181的移动的最大位移。
由于使用了枢纽22、23,弹簧21的水平刚度被减小到基本为零。弹簧21的长度也相对较大。弹簧21因此不会在平衡质量块183的移动范围内引入任何显著的水平刚度。
由弹簧21的组合提供的提升力可以与由平衡质量块183的重量产生的重力基本相同,使得平衡质量块183的重量主要由弹簧21支撑。然而,弹簧21的提升力不必与施加在平衡质量块183上的重力完全相等,因为残余力(即,施加在平衡质量块183上的重力与由弹簧21提供的提升力之间的差)可以被由板簧184施加的重力支撑力抵消。然而,该残余力将显著低于施加在平衡质量块183上的重力。
例如,当由弹簧21的组合提供的提升力是施加在平衡质量块183上的重力的90%至110%时,只有重力的最大10%必须被板簧184吸收。在弹簧21提供的提升力小于施加在平衡质量块183上的重力的100%的情况下,被板簧184吸收的该力可以是向上的力,或者在弹簧21提供的提升力大于施加在平衡质量块183上的重力的100%的情况下,被板簧184吸收的该力可以是向下的力。
在一个实施例中,必须由多个板簧184组合提供的最大推/拉力小于由于平衡质量块183的重量而施加在平衡质量块183上的重力的0.5倍,例如在由于平衡质量块183的重量而施加在平衡质量块183上的重力的0.05倍到0.4倍的范围内,诸如在由于平衡质量块183的重量而施加在平衡质量块183上的重力的0.08倍到0.2倍的范围内。
在备选实施例中,其他类型的机械重力补偿器可以被用于在平衡质量块183上提供提升力。例如,在图5的实施例中,弹簧21被提供,弹簧21向上拉动平衡质量块183来提供平衡质量块183上的提升力。备选地,弹簧或其他机械重力补偿器可以被提供,以向上推动平衡质量块183来提供平衡质量块183上的提升力。
图6示出了可以被用作磁重力补偿器的一部分的磁体组件30的一个实施例。磁体组件30包括彼此相邻布置的三个下部永磁体31和三个上部永磁体32。每个上部永磁体32被布置在下部永磁体31中的一个下部永磁体之上。下部永磁体31和上部永磁体32中的相邻永磁体在竖直方向(即,z方向)上具有相反的磁化。磁体组件30中的各个磁体31、32的磁化方向由图6中各个磁体31、32中的箭头表示。
图7a示出了针对定位装置180的两个磁重力补偿器35,其中磁重力补偿器35中的每一个包括如图6所示的磁体组件30。磁重力补偿器35各自包括安装在基准物10上的下部永磁体31和安装在平衡质量块183上的上部永磁体32。在上部永磁体32和平衡质量块183之间提供磁屏蔽件37,以将磁重力补偿器35的磁场与定位装置180中的其他磁场(例如,致动器182的磁场)屏蔽。磁屏蔽件37还可以被用于将磁重力补偿器35的磁场与其他元件(诸如电子光学系统200的电子束202(见图2))至少部分地屏蔽。当需要时,另外的磁屏蔽件可以被提供以将磁重力补偿器与其他磁场屏蔽,反之亦然。磁屏蔽件可以被安装在平台181、平衡质量块183、基准物10或任何其他合适的位置上。
甚至可以提供更进一步的磁屏蔽件以屏蔽由重力补偿器和/或任何磁性部件(例如,致动器182、平衡质量块致动器70)产生的磁场,以特别是在对磁场灵敏的区域(例如,物体190之上或周围的区域,在该区域中,运动对磁场灵敏的电子束被辐射;电子光学系统170周围的区域;或者电子光学系统170和物体190之间的区域,在该区域中,电子束移动穿过)中,避免或减少到周围空间的磁场泄漏。图7b示出了这样的更进一步的磁屏蔽件38的一个实施例。更进一步的磁屏蔽件38包围重力补偿器35的永磁体31、32和/或致动器182和平衡质量块致动器70的被布置在平衡质量块183中/上的永磁体182.1、70.1。更进一步的磁屏蔽件38可以被配备有允许平衡质量块183移动所必需的狭缝和/或开口(例如,更进一步的磁屏蔽件38中的狭缝或开口可以被布置围绕板簧184,以允许平衡质量块183的运动和板簧184的变形)。更进一步的磁屏蔽件38的材料可以被选择为使得材料在更进一步的磁屏蔽件38内的磁通密度层级(=更进一步的磁屏蔽件38的位置处的磁通密度层级)处具有较高相对磁导率38)。当更进一步的磁屏蔽件的磁导率较高时,更进一步的磁屏蔽件38阻挡更多的磁场。根据在更进一步的磁屏蔽件38内的磁通密度层级,可以使用不同的材料和/或材料成分。在一个实施例中,材料可以是铁镍合金。本领域技术人员应清楚,提供这样的更进一步的磁屏蔽件的相同概念适用于其他配置,诸如图7a中重力补偿器35被布置在平衡质量块下方的配置。
更进一步的磁屏蔽件38可以包括一个或多个磁屏蔽件。在一个实施例中,更进一步的磁38包括内部磁屏蔽件38.1和外部磁屏蔽件38.2。内部磁屏蔽件38.1包围重力补偿器35的永磁体31、32和/或致动器182和平衡质量块致动器70的被布置在平衡质量块183中/上的永磁体182.1、70.1。外部磁屏蔽件38.2包围内部磁屏蔽件38.1,在其之间具有间隙38.3(图7c)。永磁体31、32、182.1、70.1的大部分磁场被内部磁屏蔽件38.1e38.1屏蔽朝向内部磁屏蔽件38.1的外侧。由于间隙38.3(例如,在本文件的实施例中为真空,或者在另一潜在实施例中为空气)的高电阻率,泄漏的磁场然后被吸引朝向外部磁屏蔽件38.2并且因此被外部磁屏蔽件38.2屏蔽。间隙38.3也可以被非铁磁材料、具有低相对磁导率(例如,低于内部和外部磁屏蔽件38.1、38.2的磁导率)的任何材料、或者具有接近或基本上等于1的相对磁导率的任何材料占据。不同的材料可以被选择用于内部和外部磁屏蔽件38.1、38.2。内部或外部磁屏蔽件38.1、38.2的材料可以被选择为使得材料分别在内部或外部磁屏蔽件38.1、38.2的位置的磁通密度层级处具有高相对磁导率。用于内部屏蔽件38.1的材料可以被选择为在内部磁屏蔽件38.1内的磁通密度层级(=内部磁屏蔽件38.1的位置处的磁通密度)处具有高相对磁导率的材料。用于外部磁屏蔽件38.2的材料可以被选择为与内部磁屏蔽件38.1的材料不同的材料。用于外部磁屏蔽件38.2的材料可以被选择为在外部磁屏蔽件38.2内的磁通密度层级(=外部磁屏蔽件38.2的位置处的磁通密度层级)处具有高相对磁导率的材料。内部和外部磁屏蔽件38.1、38.2的材料可以是不同成分比的相同合金,例如,不同成分比的铁镍合金。
磁体组件30被设计为在下部永磁体31和上部永磁体32之间施加排斥力,使得该排斥力充当平衡质量块183上的提升力来抵消施加在平衡质量块183上的重力。在正常操作中,磁体组件30被设计为在竖直方向(z方向)上,在平衡质量块183上施加提升力,而不在水平方向(包括平衡质量块183的移动方向y)上施加任何显著的力。因此,磁体组件30用作磁重力补偿器35,其可以在竖直方向上提供高(磁性)刚度,而在水平方向基本没有刚度。由于施加在平衡质量块183上的大部分重力可以由磁重力补偿器35承载,板簧184可以被设计为具有显著较低的竖直和水平刚度。
例如,由磁重力补偿器35的组合提供的提升力可以是施加在平衡质量块183上的重力的90%至110%。在这样的情况下,只有最大10%的重力必须被板簧184吸收。在磁铁组件30的组合提供的提升力小于施加在平衡质量块上的重力的100%的情况下,要被板簧184吸收的该力可以是向上的力,或者在磁铁组件30的组合提供的提升力大于施加在平衡质量块183上的重力的100%的情况下,要被板簧184吸收的该力可以是向下的力。
在一个实施例中,由多个板簧184组合提供的最大力可以小于施加在平衡质量块183上的重力的0.5倍,例如在施加在平衡质量块183上的重力的0.05倍到0.4倍的范围内,诸如在施加在平衡质量块183上的重力的0.08倍至0.2倍的范围内。
多个板簧184的较低水平刚度的附加益处是:平衡质量块致动器70用于抵消由平衡质量块183的偏心位置引起的干扰力可能需要的致动力也可以被显著降低。结果,这样的平衡质量块致动器70的热耗散也可以显著降低。
由于使用磁重力补偿器35,可以设计允许相对于其长度有较大位移的板簧;例如,在移动方向y上从平衡质量块183的中心位置的最大允许位移可以是板簧184的有效长度的至少0.15倍,例如为板簧的有效长度的0.2倍。从y-z平面看,板簧的有效长度是相对于平衡质量块183固定的板簧的点与相对于基准物10固定的板簧的点之间的距离。
如上所述,平衡质量块183被构造为响应于平台181的移动,在与平台181的移动方向相对的方向上移动,以防止或至少减少反作用力从致动器182到基准物10的传递。作为平衡质量块在移动方向上移动的结果,上部永磁体32可以在移动方向(y方向)上,相对于下部永磁体31被定位在不同的水平位置中。下部永磁体32在移动方向y上的长度大于上部永磁体在移动方向y上的长度,使得图7a所示实施例的磁重力补偿器35在平衡质量块183的移动范围内,基本上独立于平衡质量块183相对于基准物10位置的水平位置而在平衡质量块183上施加提升力。当提升力具有20%的最大偏差(例如,10%的最大偏差)时,在平衡质量块183的移动范围内,由磁重力补偿器35提供的提升力可以例如被认为基本上独立于平衡质量块183在y方向上相对于基准物10的位置。
在一个实施例中,在与移动方向垂直的水平方向上(在当前示例中是在x方向上),平衡质量块183可能存在一些位移。在这样的情况下,图7a中所示的实施例的磁重力补偿器35还可以被设计为在垂直于移动方向的该水平方向上(在x方向上),在该方向上的移动范围内,基本上独立于平衡质量块183相对于基准物10位置的水平位置而在平衡质量块183上施加提升力。当提升力具有20%的最大偏差(例如,10%的最大偏差)时,在平衡质量块183在x方向上的移动范围内,由磁重力补偿器35提供的提升力例如可以被认为基本上独立于平衡质量块183相对于基准物10在x方向上的位置。
图7a的定位装置180可以例如被布置在真空环境40(例如真空室)中,在该真空环境中,存在相对低的压力,因为磁重力补偿器35的作用基于磁力。
图7a的磁重力补偿器35被设计为在平衡质量块183上施加排斥力,排斥力向上推动平衡质量块183。在一个备选实施例中,一个或多个磁重力补偿器可以被提供为在平衡质量块上施加吸引力来向上拉动平衡质量块。在这样的实施例中,磁重力补偿器35可以例如代替如图5所示的枢纽22、23和弹簧21。
图8公开了根据本发明的一个方面的另一实施例的定位装置180。定位装置包括平台181、致动器182、平衡质量块183,平衡质量块183由基准物10上的板簧184支撑。如关于图4的定位装置所解释的,平衡质量块183的重量需要板簧184在竖直方向上具有最小刚度,以在平衡质量块183上施加提升力来抵消施加在平衡质量块183上的重力。平衡质量块183的重量与平台181的重量之间的重量比率以及平台181的期望位移决定了板簧184在平衡质量块183和基准物10之间应允许的最大位移。板簧184的设计被优化为在竖直和水平方向上具有最小刚度。如上所述,板簧184在平衡质量块183的水平移动方向(y方向)上仍需要一定刚度,以为平衡质量块183提供稳定支撑。当平衡质量块183移出中心位置时,板簧184在水平移动方向(y方向)上的该刚度通常会产生将平衡质量块183推回到平衡质量块183的中心位置的力。
在图8所示的实施例中,刚度减小装置60被提供,刚度减小装置60作用在基准物10和平衡质量块183之间,以在水平方向上提供负刚度来抵消板簧184的水平刚度。
刚度减小装置60包括在基准物10上安装的永磁体61以及在平衡质量块183上利用板支撑件63安装的磁性或可磁化材料的板62。在一个备选实施例中,永磁体可以被安装在基准物10上,并且磁性或可磁化材料的板可以例如利用板支撑件而被安装在平衡质量块183上。
图9示出了刚度减小装置60的永磁体61和板62的截面的俯视图A-A。板62是由磁性或可磁化材料(诸如铁磁材料)制成的板状体,板62包括开口64,永磁体61被布置在开口64中。永磁体61可以在开口64内沿移动方向(y方向)和垂直于移动方向的水平方向(x方向)移动。当由致动器182致动时,永磁体61在开口64内的移动范围对应于由于平台181的移动而由平衡质量块183做出的移动。
在图8和图9中,平衡质量块183处于其移动范围的中心位置中,其中永磁体61也被布置在开口64的中心位置中。开口64被设计和定位为使得在永磁体61在开口64内的该中心位置中,永磁体61和板62之间的磁力在移动方向y的正负方向上将基本相等。换言之,作用在永磁体61和板62之间的磁力彼此补偿。
图10示出了从板62的开口64内的中心位置移出之后(例如,如图10所示在正y方向上)的永磁体61。该移动由平衡质量块183从其中心位置的移出引起。在永磁体61相对于开口64的该非中心位置中,永磁体61和板62之间的磁力将不再彼此补偿。例如,在永磁体61的一侧(例如,图10中的右侧)处,永磁体61和板62之间的距离被减小,从而导致永磁体61和板62之间的吸引磁力增加,但是在永磁体61的相对侧(例如,图10中的左侧)处,永磁体61和板62之间的距离增加,从而导致永磁体61和板62之间的吸引磁力减小。结果,由于永磁体61和板62之间的吸引磁力在图10所示位置中的该失衡,永磁体61将在正y方向上,被永磁体61和板62之间的磁力有效地拉动(图10中的右侧)。永磁体61上的该拉力用作负刚度,其可以被用于抵消板簧184中y方向上的水平刚度,板簧184将在移动方向y的相反负方向上将平衡质量块183(到图10中的左侧)推回到永磁体61在开口64中的中心位置。
在当前实施例中,由刚度减小装置60提供的负刚度被配置为抵消板簧184的刚度。负刚度不一定由材料的刚度创建。
板簧184的刚度和由刚度减小装置60提供的负刚度提供了平衡质量块183的支撑件的组合刚度。该组合刚度是比板簧184的水平刚度低的刚度。结果,板簧184的水平刚度的干扰效应可以被显著减小。
图11示出了板簧184的第一刚度分布SLS、刚度减小装置60的第二刚度分布SRD以及将第一刚度分布SLS和第二刚度分布SRD的刚度进行组合的组合刚度分布CSP。刚度分布示出了平衡质量块183在移动方向y上相对于中心位置(P
板簧184的第一刚度分布SLS和刚度减小装置60的第二刚度分布SRD是线性刚度分布。显然,刚度减小装置60的第二刚度分布SRD被适配于板簧184的第一刚度分布SLS来获得预定的组合刚度分布CSP。刚度减小装置60的第二刚度分布SRD可以被设计为线性或非线性的,以获得期望的组合刚度分布CSP。刚度减小装置60的第二刚度分布SRD由板62的开口64的形状和尺寸、永磁体61的形状和尺寸以及永磁体61的磁化来确定。
例如,第一刚度分布SLS可以是非线性刚度分布,例如具有从平衡质量块183的中心位置逐渐增加的刚度的刚度分布。第二刚度分布SRD可以在相对方向上提供对应的非线性刚度分布,以获得线性组合刚度分布CSP。在另一实施例中,组合刚度分布CSP可以是非线性刚度分布。
为了抵消板簧184在x方向(即,垂直于(主)移动方向y的水平方向)上的正刚度,刚度减小装置60还可以被配置为在x方向上提供负刚度。当平衡质量块183在其在x方向上的移动范围的中心位置中时,如图8和图9所示,永磁体61也将在x方向上的开口64的中心位置中。开口64可以被设计和定位为使得在永磁体61在开口64内的该中心位置中,永磁体61和板62之间在x方向的正负方向上的磁吸引力将相同或者至少基本相似。换言之,当永磁体61位于开口64中的中心位置中时(沿x方向观察),作用在永磁体61和板62之间的沿x方向的磁力彼此补偿。
当开口64中的永磁体61在x方向上移出中心位置时,这将导致作用在永磁体61和板62之间的磁力之间的失衡,失衡将有效地拉动永磁体61远离中心位置。因此,当永磁体61将从图9所示的中心位置沿正x方向移动(到图10的顶部)时,作用在永磁体61和板62之间的磁力将一起在永磁体61上施加沿正x方向的拉力。永磁体61上的该拉力用作抵消板簧184中x方向上的水平刚度的负刚度,板簧184将在x方向的相对方向上将平衡质量块183推回(到图10的底侧)永磁体61在开口64中的中心位置。因此,同样在x方向上,负刚度可以由刚度减小装置60来提供。
永磁体61的形状及其磁化以及板62和其中开口64的形状被选择为提供期望的负刚度分布。在一个实施例中,该期望的负刚度分布可以被适配于平衡质量块183的寄生移动,使得由寄生移动导致的x方向上的水平刚度至少部分地被刚度减小装置60补偿。
在刚度减小装置60的设计中,刚度减小装置60允许的移动范围(即,永磁体61在开口64中的移动范围)将被适配于平衡质量块183在一个或两个水平方向上的期望移动范围。
在图8所示的实施例中,定位装置180被布置在真空环境40(例如,真空室)中,在真空环境中,存在相对低的压力。由于刚度减小装置60的作用基于磁力,因此刚度减小装置60可以被有效地应用于真空环境40中。此外,刚度减小装置60的实施例还可以包括磁屏蔽件(未示出,但类似于图7a的磁屏蔽件37),用于将刚度减小装置60的(多个)磁场与其周围环境屏蔽或者将其减小。
在图8中,平衡质量块致动器70被示出。这样的平衡质量块致动器70可以被提供为在需要时,将平衡质量块183保持在移动范围内的位置中,特别是以防止平衡质量块183由于板簧184的水平刚度而返回到平衡质量块183的中心位置。在一个实施例中,平衡质量块致动器70可以被设计为还用作刚度减小装置,其中平衡质量块致动器被布置为主动提供致动力来抵消由板簧184在移动方向上的刚度而产生的静态干扰力。
图12示出了根据本发明的一个方面的定位装置180的一个实施例,其中磁重力补偿器35的磁体组件30的上部永磁体32也用作刚度减小装置的永磁体来减小平衡质量块183在移动方向y上的水平刚度。磁体组件30对应于图6所示的磁体组件。
图13示出了定位装置180在磁体组件30的上部永磁体32的高度处的截面B-B。
磁体组件30的下部永磁体31被安装在基准物10上,并且上部永磁体32被安装在平衡质量块183上。磁体组件30被布置在磁屏蔽件37下方。下部永磁体31将在上部永磁体32上施加提升力,并且因此在平衡质量块183上施加提升力,从而导致在使用中,平衡质量块183在竖直方向上施加在板簧184上的重力减小。由于平衡质量块183的大部分重量将由磁体组件30形成的磁重力补偿器支撑,板簧184可以被设计为具有显著减小的竖直刚度。结果,板簧184在平衡质量块183的移动方向y上的水平刚度也可以被减小。这将有效地减小由板簧184的水平刚度产生的干扰力。此外,由致动器70提供的用于抵消干扰力的致动力可以更低,从而导致致动器70中的热耗散更少。
为了进一步降低板簧184的水平刚度的影响,上部永磁体32可以被布置在板62的开口64中,该板62利用板支撑件63而被安装在基准物10上。上部永磁体32和板62用作刚度减小装置。板62的开口64被设计为使得在上部永磁体32(被附接到平衡质量块183)的中心位置中,如图12和图13所示,在永磁体32和板62之间没有施加有效磁力。换言之,作用在上部永磁体32和板62之间的磁力彼此补偿。
如果开口64中的上部永磁体32例如在正y方向上从中心位置移出,则上部永磁体32将更靠近开口64的一个边缘并且远离开口64的相对边缘。这导致在板62的开口64的相对侧处,作用在上部永磁体32的一侧和板62的边缘之间的磁力与作用在上部永磁体32的相对侧和板62的边缘之间的磁力之间的失衡。该失衡将导致上部永磁体32将被作用在永磁体32和板62之间的磁力有效地拉动远离中心位置,例如在正y方向上朝向开口64的最近边缘。上部永磁体32上的该拉力用作负刚度,负刚度至少部分地抵消板簧184中在y方向上的水平刚度,板簧184将在与移动方向相对的方向上,将平衡质量块183推回(到图13中的左侧)到平衡质量块183的中心位置。
对应于图8中所示的实施例,由磁体组件30的永磁体32和板62(具体是板62中的开口64)形成的刚度减小装置产生的刚度分布可以相对于板簧184的刚度分布来适配,以创建平衡质量块183的期望组合刚度分布。
图14示意性地描绘了根据本发明的一个方面的定位装置180的第四实施例。定位装置180包括一个磁重力补偿器80。实际上,可以提供多个磁重力补偿器。磁重力补偿器80包括可磁化材料的第一元件81,第一元件81利用支撑件82而被安装到平衡质量块183。磁重力补偿器80还包括在可磁化材料的第二元件84中布置的永磁体83,第二元件84均被安装在基准物10上(例如,借助第一元件81中的孔或者通过其他方式、未示出的支撑件)。第一元件81和第二元件84可以被提供来引导由永磁体83提供的磁场。
磁重力补偿器80被构造为使得磁体83在第一元件81上施加吸引力。磁重力补偿器80的该吸引力向上拉动平衡质量块183。这具有如下优点,如上文关于重力补偿器的其他实施例所述,由板簧184支撑的力可以被显著减小。结果,板簧184可以被设计为具有较小的水平刚度,从而导致在移动方向y上的干扰力较小,并且平衡质量块致动器70中的热耗散较少。
在当前实施例中,磁重力补偿器80被构造为允许平衡质量块183在移动方向y上并且根据需要在x方向上移动,同时在第一元件81与永磁体83和第二元件84的组合之间保持基本相同的吸引磁力。
此外,磁重力补偿器80被配置为在第一元件81和永磁体83之间提供比平衡质量块183上施加的重力更大的吸引磁力。这具有以下优点:重力由第一元件81和永磁体83之间的吸引磁力完全补偿,结果是当板簧184例如由于疲劳而故障时,平衡质量块183将被磁重力补偿器80提升。由于第一元件81和磁体83之间的间隙相对较小,因此板簧183的故障将仅导致平衡质量块184的较小的向上移动,从而闭合第一元件81和磁体83之间的间隙,而不是使得平衡质量块184向下落在基准物10上。磁重力补偿器80的该实施例可以防止损坏定位装置180的部件,诸如致动器182、平衡质量块致动器70或磁屏蔽件。
图15示出了图14的定位装置的细节,定位装置包括第一元件81、永磁体83和第二元件84。边沿85被提供在第二元件84面向第一元件81的表面上。边沿85防止第一元件83在板簧184发生故障的情况下将抵靠永磁体83移动。具有的边沿可以防止对永磁体83的损坏。作为备选,其他突起(诸如球状件)可以被提供在第二元件84面向第一元件81的表面上来保护磁体83。
图16示出了第一元件81、永磁体83和第二元件84的一个备选实施例,其中永磁体83被保护免受可能由第一元件81在板簧184故障的情况下向上移动引起的损坏。在该实施例中,第二元件84包括凹部86,永磁体83被放置在凹部86中,其中凹部86的深度大于永磁体83在相同方向上的高度。结果,永磁体83被完全布置在凹部86中。当第一元件81在板簧184故障之后向上移动时,第二元件84包围凹槽86并且面向第一元件81的表面将防止第一元件81与永磁体83接触。
在图14的实施例中,第一元件81被安装在平衡质量块183上并且永磁体83和第二元件84被安装在基准物10上。在一个备选实施例中,第一元件81可以被安装基准物10上并且永磁体83和第二元件84可以被安装在平衡质量块183上。此外,第一元件81和永磁体83也可以被设计为在第一元件81和永磁体83之间提供排斥力,该排斥力被用于在平衡质量块183上施加提升力。
在上文中,描述了定位装置的不同实施例,其中在平衡质量块的移动方向上支撑平衡质量块的板簧的刚度的干扰效应至少部分地通过重力补偿器和/或刚度减小装置来补偿。这样的定位装置可以被应用于任何电子束设备,诸如电子束检查设备、电子束光刻设备或者使用电子束的任何其他设备。
在上述实施例中,平衡质量块183旨在沿一个水平方向移动来跟随平台181的移动。在其他实施例中,平衡质量块183可以沿两个垂直的水平方向移动。重力补偿器和/或刚度减小装置可以被设计为允许平衡质量块在两个水平方向上的移动范围内的移动。
上文描述的重力补偿器和/或刚度减小装置使用永磁体。在一个备选实施例中,磁体还可以是可以被电能磁化的电磁体。
此外,在一些上述实施例中,永磁体被安装在基准物上,而与磁体磁性配合的相对元件被安装在平衡质量块上。在备选实施例中,磁体可以被安装在平衡质量块上,而相对元件可以被安装在基准物上。
重力补偿器和/或刚度减小装置还可以应用于电子束设备的定位装置中,以减少支撑平衡质量块、在平衡质量块的水平移动方向上具有刚度的另一支撑装置的干扰效应。
实施例可以使用以下条款来进一步描述:
1.一种被配置为使物体移位的定位装置,包括:
用于支撑物体的平台,
致动器,用于将平台在移动方向上相对于基准物移动,
被布置在致动器和基准物之间的平衡质量块,用于减少从致动器到基准物的反作用力传递,
被布置在基准物和平衡质量块之间的支撑装置,用于支撑平衡质量块,以及
作用于基准物和平衡质量块之间的重力补偿器,用于在平衡质量块上施加提升力来减小由支撑装置提供的用于支撑平衡质量块的重力支撑力。
2.根据条款1所述的定位装置,其中重力补偿器是磁重力补偿器。
3.根据条款2所述的定位装置,其中定位装置包括磁屏蔽件,该磁屏蔽件用于屏蔽磁重力补偿器的磁场。
4.根据条款1所述的定位装置,其中重力补偿器是机械重力补偿器。
5.根据前述条款中任一项所述的定位装置,其中重力补偿器被布置为在平衡质量块上施加吸引力,或者其中重力补偿器被布置为在平衡质量块上施加排斥力。
6.根据条款1至5中任一项所述的定位装置,其中重力补偿器在移动方向上的刚度显著小于支撑装置在移动方向上的刚度。
7.根据条款1至6中任一项所述的定位装置,其中重力补偿器提供的提升力是在平衡质量块上施加的重力的0.8倍-1.2倍。
8.根据条款1至6中任一项所述的定位装置,其中定位装置包括多个重力补偿器,其中多个重力补偿器一起提供的提升力是在平衡质量块上施加的重力的0.8-1.2倍。
9.根据前述条款中任一项所述的定位装置,其中支撑装置包括一个或多个弹性引导装置。
10.根据条款9所述的定位装置,其中一个或多个弹性引导装置是一个或多个板簧,其中一个或多个板簧允许在移动方向上从平衡质量块的中心位置的最大位移,并且其中一个或多个板簧各自具有有效弹簧长度,其中最大位移至少为有效弹簧长度的0.15倍。
11.根据前述条款中任一项所述的定位装置,其中将由支撑装置提供的最大提升力小于在平衡质量块上施加的重力的0.5倍。
12.根据前述条款中任一项所述的定位装置,其中重力补偿器被布置为在平衡质量块相对于基准物在移动方向上的移动范围内,在平衡质量块上施加提升力。
13.根据条款12所述的定位装置,其中重力补偿器还被布置为在平衡质量块相对于基准物在与移动方向垂直的水平方向上的移动范围内,在平衡质量块上施加提升力。
14.根据前述条款中任一项所述的定位装置,其中移动方向是水平方向。
15.根据前述条款中任一项所述的定位装置,其中重力补偿器被布置为在移动方向上提供负刚度,负刚度至少部分地抵消支撑装置在移动方向上的正刚度。
16.根据条款15所述的定位装置,其中重力补偿器被布置为根据平衡质量块相对于基准物在移动方向上的位置来提供负刚度。
17.根据条款15或16所述的定位装置,其中正刚度和负刚度在移动方向上、在基准物和平衡质量块之间产生组合刚度,其中重力补偿器被设计为沿移动方向提供预定组合刚度分布。
18.一种被配置为使物体移位的定位装置,包括:
用于支撑物体的平台,
致动器,用于在移动方向上相对于基准物移动平台,
被布置在致动器和基准物之间的平衡质量块,用于减少从致动器到基准物的反作用力传递,
被布置在基准物和平衡质量块之间的支撑装置,支撑装置在移动方向上具有第一刚度,以及
作用在基准物和平衡质量块之间的刚度减小装置,刚度减小装置在移动方向上提供第二刚度,其中第二刚度是至少部分地抵消第一刚度的负刚度。
19.根据条款18所述的定位装置,其中刚度减小装置被布置为根据平衡质量块相对于基准物在移动方向上的位置来提供第二刚度。
20.根据条款19所述的定位装置,其中刚度减小装置的第二刚度与平衡质量块相对于基准物在移动方向上的位置线性相关。
21.根据条款19所述的定位装置,其中刚度减小装置的第二刚度与平衡质量块相对于基准物在移动方向上的位置非线性相关。
22.根据条款19至21中任一项所述的定位装置,其中第一刚度和第二刚度在第一移动方向上、在基准物和平衡质量块之间产生组合刚度,其中刚度减小装置被设计为沿移动方向提供预定组合刚度分布。
23.根据条款22所述的定位装置,其中预定组合刚度分布是线性分布。
24.根据条款22所述的定位装置,其中预定组合刚度分布是非线性分布。
25.根据条款22至24中任一项所述的定位装置,其中刚度减小装置被布置为提供组合刚度分布,其中在平衡质量块相对于基准物的位置处的组合刚度是比第一刚度的0.2倍小的正刚度。
26.根据条款18至25中任一项所述的定位装置,其中刚度减小装置被配置为:当平衡质量块相对于基准物处于中心位置时,提供基本上等于零的第二刚度。
27.根据条款24或26所述的定位装置,其中预定组合刚度分布具有在移动方向上,从平衡质量块的中心位置逐渐增加的组合刚度。
28.根据条款18至27中任一项所述的定位装置,其中刚度减小装置包括一个或多个磁体,一个或多个磁体被安装在基准物和平衡质量块中的一者上,并且在移动方向上,作用于在基准物和平衡质量块中的另一者上安装的磁性或可磁化结构。
29.根据条款18至28中任一项所述的定位装置,其中刚度减小装置包括磁性或可磁化结构,磁性或可磁化结构具有开口以及布置在开口中的一个或多个磁体,其中开口和/或一个或多个磁体的尺寸被选择为根据一个或多个磁体相对于开口在移动方向上的位置来提供预定第二刚度。
30.根据条款28或29所述的定位装置,其中一个或多个磁体是永磁体或电磁体。
31.根据条款18至30中任一项所述的定位装置,其中平衡质量块致动器被布置为主动地提供致动力,该致动力至少部分地抵消由支撑装置在移动方向上的刚度产生的干扰力。
32.根据条款18至31中任一项所述的定位装置,其中支撑装置包括在平衡质量块和基准物之间布置的一个或多个弹性引导装置。
33.根据条款1至32中任一项所述的定位装置,包括磁屏蔽件,磁屏蔽件被布置为基本上包围平衡质量块和磁重力补偿器的至少一部分以屏蔽磁重力补偿器的磁场,其中磁屏蔽件包括允许平衡质量块响应于反作用力而移动的开口。
34.根据条款33所述的定位装置,其中磁屏蔽件的材料基于材料在磁屏蔽件内的磁通密度层级处的相对磁导率来选择,以实现磁场的有效屏蔽。
35.根据条款33或34所述的定位装置,其中在致动器和/或平衡质量块致动器的操作期间产生磁场的致动器和/或平衡质量块致动器的至少一部分被布置在平衡质量块中、平衡质量块上、平衡质量块周围或者与平衡质量块连接,并且其中磁屏蔽件基本上包围致动器和/或平衡质量块致动器的至少一部分。
36.根据条款33至35中任一项所述的定位装置,其中磁屏蔽件包括第一磁屏蔽件和第二磁屏蔽件,其中第一磁屏蔽件基本上包围平衡质量块、磁重力补偿器以及致动器和/或平衡质量块致动器的至少一部分中的一者或多者,并且其中第二磁屏蔽件基本上包围第一磁屏蔽件。
37.根据条款36所述的定位装置,其中磁屏蔽件包括在第一磁屏蔽件和第二磁屏蔽件之间的空间或者在第一磁屏蔽件和第二磁屏蔽件之间的非铁磁材料、相对磁导率小于第一磁屏蔽件和第二磁屏蔽件的材料、以及具有接近或基本等于1的相对磁导率的材料中的一者或多者。
38.根据条款36或37所述的定位装置,其中第一磁屏蔽件的第一材料基于第一材料在第一磁屏蔽件内的第一磁通密度层级下的第一相对磁导率来被选择,并且第二磁屏蔽件的第二材料与第一材料不同,第二磁屏蔽件的第二材料基于第二材料在第二磁屏蔽件内的第二磁通密度层级下的第二相对磁导率来被选择,以实现磁场的有效屏蔽。
39.一种刚度减小装置,用于减小在基准物和平衡质量块之间布置的支撑装置的第一刚度,从而允许在移动方向上,在平衡质量块和基准物之间的移动,其中刚度减小装置在移动方向上提供第二刚度,其中第二刚度是至少部分地抵消第一刚度的负刚度。
40.根据条款39所述的刚度减小装置,其中刚度减小装置包括一个或多个磁体,一个或多个磁体被安装在基准物和平衡质量块中的一者上,并且在移动方向上,作用于在基准物和平衡质量块中的另一者上安装的磁性或可磁化结构。
41.根据条款39至40中任一项所述的刚度减小装置,其中刚度减小装置被布置为根据平衡质量块相对于基准物在移动方向上的位置来提供第二刚度。
42.根据条款39至41中任一项所述的刚度减小装置,其中第一刚度和第二刚度在第一移动方向上、在基准物和平衡质量块之间产生组合刚度,其中刚度减小装置被布置为沿移动方向提供预定组合刚度分布。
43.一种电子束设备,包括:
根据条款1至38中任一项所述的定位装置,其中定位装置被配置为使物体相对于由电子光学系统生成的电子束移位。
44.根据条款43所述的电子束设备,其中电子束设备是电子束检查设备、电子束光刻设备或者使用电子束的任何其他设备。
45.一种具有真空室的设备,包括根据条款1至38中任一项所述的定位装置,其中定位装置被布置在真空室中。
46.一种包括根据条款1至38中任一项所述的定位装置的设备,其中设备是光刻设备。
虽然本发明已关于其优选实施例进行了解释,但是应当理解,在不脱离如所要求保护的本发明的精神和范围的情况下,可以进行其他修改和变化。可能的其他应用包括用于将图案转印(例如,通过曝光工艺)到半导体晶片上、包括本发明的定位装置的光刻设备。
- 定位装置、刚度减小装置和电子束设备
- 在小形状因数设备中使用材料以增加结构刚度、减小尺寸、改善安全性、增强热性能和加速充电