一种能自动规划安全巡检路线的智能系统及其应用方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及智能巡检领域,具体涉及其一种能自动规划安全巡检路线的智能系统及其应用方法。
背景技术
在一些危险的工作区域,人为的巡检会存在安全隐患,需要通过巡检设备进行安全巡检,在巡检的同时需要制定规划巡检路线,本方案具体涉及其一种能自动规划安全巡检路线的智能系统及其应用方法;
但是现有的巡检路线的智能系统在使用时,不能够在巡检设备巡检时进行障碍物识别和避让,不能够优化巡检设备的巡检路线,巡检路线的智能系统的工作效率较低。
发明内容
本发明的主要目的在于提供一种能自动规划安全巡检路线的智能系统及其应用方法,可以有效解决背景技术中提出的问题。
为实现上述目的,本发明采取的技术方案为:
一种能自动规划安全巡检路线的智能系统,包括中央控制模块、定位模块、避障模块、识别模块、数据库、传输模块、采集模块、传感器和定位器;
所述中央控制模块用于实现自动规划安全巡检路线的智能控制;
所述定位模块用于巡检设备和障碍物的准确定位;
所述避障模块用于巡检设备避障规划巡检路线;
所述识别模块用于对障碍物进行识别;
所述数据库用于对巡检区域的地图和环境进行记录和存储;
所述传输模块用于对巡检相关信息进行传输;
所述采集模块用于对巡检设备和障碍物的相关信息进行采集;
所述传感器用于实现巡检相关信息的传输;
所述定位器用于实现巡检的相关定位。
优选的,所述识别模块包括摄像单元、标记单元、传输单元和储存单元。
优选的,所述识别模块具体处理步骤如下:
S1:当巡检设备巡检遇到障碍物时进行拍照上传;
S2:识别障碍物类型,判断障碍物是否为活动的物体,若不是活动的物体在地图中标记为障碍物,若是活动的物体在地图中标记为未定障碍物;
S3:判断下一次巡检是否仍在该位置遇到障碍物,若是则在地图中将未定障碍物标记改为障碍物标记,若否则在地图中将未定障碍物标记删除;
S4:分析单元对障碍物类型进行分析,并将分析的结果通过传输模块传输到中央控制模块。
优选的,所述避障模块包括传输单元、储存单元和分析单元,所述传输单元、储存单元和分析单元均通过传输线与避障模块相连接接。
优选的,所述避障模块的具体步骤如下:
A1:巡检设备进行正常巡检;
A2:判断是否有障碍物,若无障碍物直接按照原先线路完成巡检,若有障碍物,将障碍物的信息发送到基站,根据公式L=CT得出距离值进行超声波测距,式中L为测量的距离长度,C为超声波在空气中的传播速度,T为测量距离传播的时间差,T为发射到接收时间数值的一半;
A3:巡检设备进行转向操作并通过超声波测距保持与障碍物适当距离绕行,最终完成巡检。
一种能自动规划安全巡检路线的智能系统的使用应用方法,该应用方法具体包括以下步骤:
步骤一:对巡检设备进行通电,将巡检设备与相关的功能设备以及基站进行连接;
步骤二:启动巡检设备,进行巡检,当巡检设备巡检遇到障碍物时进行拍照上传,识别障碍物类型,判断障碍物是否为活动的物体,若不是活动的物体在地图中标记为障碍物,若是活动的物体在地图中标记为未定障碍物,判断下一次巡检是否仍在该位置遇到障碍物,若是则在地图中将未定障碍物标记改为障碍物标记,若否则在地图中将未定障碍物标记删除,分析单元对障碍物类型进行分析,并将分析的结果通过传输模块传输到中央控制模块;
步骤三:巡检设备进行正常巡检,判断是否有障碍物,若无障碍物直接按照原先线路完成巡检,若有障碍物,将障碍物的信息发送到基站,根据公式L=CT得出距离值进行超声波测距,式中L为测量的距离长度,C为超声波在空气中的传播速度,T为测量距离传播的时间差,T为发射到接收时间数值的一半,巡检设备进行转向操作并通过超声波测距保持与障碍物适当距离绕行,最终完成巡检;
步骤四:将识别障碍物和躲避障碍物的标记信息通过传输模块输出到中央处理模块,中央处理模块结合地图中相关信息拟定合适的安全巡检路线;
步骤五:完成巡检以及巡检路线的智能规划。
与现有技术相比,本发明具有如下有益效果:
通过设置的识别模块和避障模块,能够在巡检设备巡检时进行障碍物识别和避让,能够优化巡检设备的巡检路线,提高安全巡检路线的智能系统的工作效率。
附图说明
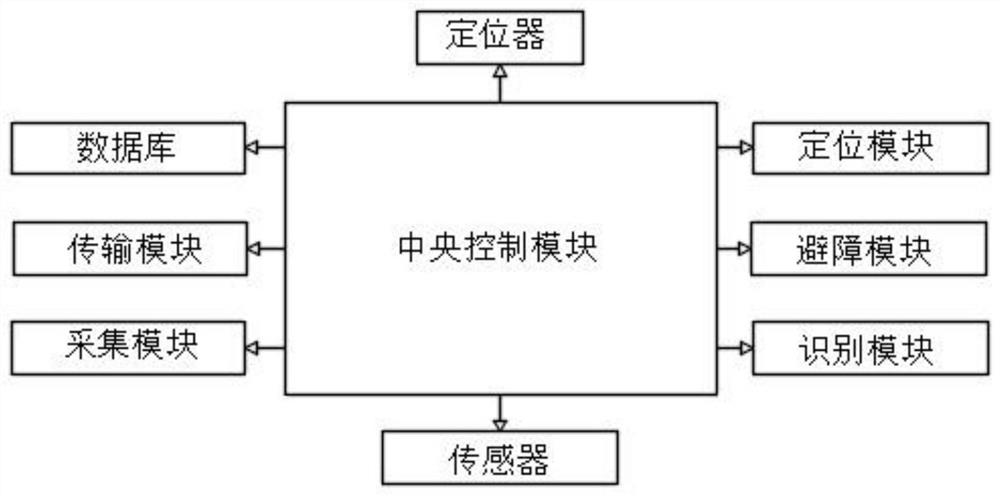
图1为本发明系统图;
图2为本发明的识别模块的流程示意图;
图3为本发明的避障模块的流程示意图。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1-3所示,一种能自动规划安全巡检路线的智能系统,包括中央控制模块、定位模块、避障模块、识别模块、数据库、传输模块、采集模块、传感器和定位器;
中央控制模块用于实现自动规划安全巡检路线的智能控制;
定位模块用于巡检设备和障碍物的准确定位;
避障模块用于巡检设备避障规划巡检路线;
识别模块用于对障碍物进行识别;
数据库用于对巡检区域的地图和环境进行记录和存储;
传输模块用于对巡检相关信息进行传输;
采集模块用于对巡检设备和障碍物的相关信息进行采集;
传感器用于实现巡检相关信息的传输;
定位器用于实现巡检的相关定位。
识别模块包括摄像单元、标记单元、传输单元和储存单元。
识别模块具体处理步骤如下:
S1:当巡检设备巡检遇到障碍物时进行拍照上传;
S2:识别障碍物类型,判断障碍物是否为活动的物体,若不是活动的物体在地图中标记为障碍物,若是活动的物体在地图中标记为未定障碍物;
S3:判断下一次巡检是否仍在该位置遇到障碍物,若是则在地图中将未定障碍物标记改为障碍物标记,若否则在地图中将未定障碍物标记删除;
S4:分析单元对障碍物类型进行分析,并将分析的结果通过传输模块传输到中央控制模块。
避障模块包括传输单元、储存单元和分析单元,传输单元、储存单元和分析单元均通过传输线与避障模块相连接接。
避障模块的具体步骤如下:
A1:巡检设备进行正常巡检;
A2:判断是否有障碍物,若无障碍物直接按照原先线路完成巡检,若有障碍物,将障碍物的信息发送到基站,根据公式L=CT得出距离值进行超声波测距,式中L为测量的距离长度,C为超声波在空气中的传播速度,T为测量距离传播的时间差,T为发射到接收时间数值的一半;
A3:巡检设备进行转向操作并通过超声波测距保持与障碍物适当距离绕行,最终完成巡检。
一种能自动规划安全巡检路线的智能系统的使用应用方法,该应用方法具体包括以下步骤:
步骤一:对巡检设备进行通电,将巡检设备与相关的功能设备以及基站进行连接;
步骤二:启动巡检设备,进行巡检,当巡检设备巡检遇到障碍物时进行拍照上传,识别障碍物类型,判断障碍物是否为活动的物体,若不是活动的物体在地图中标记为障碍物,若是活动的物体在地图中标记为未定障碍物,判断下一次巡检是否仍在该位置遇到障碍物,若是则在地图中将未定障碍物标记改为障碍物标记,若否则在地图中将未定障碍物标记删除,分析单元对障碍物类型进行分析,并将分析的结果通过传输模块传输到中央控制模块;
步骤三:巡检设备进行正常巡检,判断是否有障碍物,若无障碍物直接按照原先线路完成巡检,若有障碍物,将障碍物的信息发送到基站,根据公式L=CT得出距离值进行超声波测距,式中L为测量的距离长度,C为超声波在空气中的传播速度,T为测量距离传播的时间差,T为发射到接收时间数值的一半,巡检设备进行转向操作并通过超声波测距保持与障碍物适当距离绕行,最终完成巡检;
步骤四:将识别障碍物和躲避障碍物的标记信息通过传输模块输出到中央处理模块,中央处理模块结合地图中相关信息拟定合适的安全巡检路线;
步骤五:完成巡检以及巡检路线的智能规划。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种能自动规划安全巡检路线的智能系统及其应用方法
- 一种巡检路线规划方法和相关装置