机器人抓手快速抓取时摩擦力情况分析试验装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及试验设备技术领域,尤其涉及一种机器人抓手快速抓取时摩擦力情况分析试验装置。
背景技术
机械手抓取薄壁易碎物品作业时,尤其是高速作业,常出现抓取力较大时损坏物品或者抓取力较小时物品脱落的现象。机械手和物品之间的摩擦力大小与物品的掉落有直接关系,为了更方便的研究摩擦力,通常假设摩擦服从库仑定律,接触运动用3个自由度的“点接触”模型或2个自由度的“软手指”模型表示,抓取和操作本质上是接触驱动的过程。因此,接触条件对机械手抓取行为有深刻影响;由于机械手接触表面是力系统和运动传递的界面。因此,机械手与夹持物件接触与摩擦性能也受到手指材质及纹理的限制。
适宜的机械手指结构刚度特征,以及与待作业易碎件的刚度匹配对于实现易碎件的可靠作业十分关键。机械手结构刚度过低,则无法完成力与能量传递;而机械手结构刚度过高,则可能在作业过程中,由于快速接触冲击形成对易碎件的破坏。而不同的机械手指的结构形貌将改变与接触对象之间接触与摩擦力传递,在作业中与易碎件表面形成不同的摩擦约束。
总而言之,为了机械手准确、快速抓取与转运薄壁易碎物品,寻找在满足易碎物品接触强度的条件下,不同的机械手指接触表面的形貌对不同物体的摩擦系数就非常重要。
因而,研究机械手指表面的摩擦系数十分必要。为了使摩擦系数的测量更加简便,有必要设计一台结构简单、便于操作的摩擦系数测量装置。
发明内容
为了解决上述问题,本发明提出一种机器人抓手快速抓取时摩擦力情况分析试验装置。
本发明的技术方案是:一种机器人抓手快速抓取时摩擦力情况分析试验装置,包括通过倒T形支架竖向安装在试验台上方的直线模组,
直线模组的螺母滑块上固定连接有摩擦力测量组件,试验台上设有和直线模组驱动器的控制系统连接的加速度规律控制模块;
摩擦力测量组件包括升降板,升降板通过其内端设置的竖向支座水平固定连接在螺母滑块的外侧面,升降板的上表面设有用于夹紧圆柱类工件的夹具,夹具内设有用于测量夹紧力的弹簧测力计。
优选的,所述的夹具包括相对设置的弧形夹板甲和弧形夹板乙,升降板的上表面设有夹板支架,夹板支架的内端和中间依次设有竖向板甲、竖向板乙,弧形夹板甲通过其外侧面中间设置的横轴甲和竖向支座固定连接,弧形夹板乙通过其外侧面中间设置的横轴乙滑动连接在竖向板甲中部的通孔内,两弧形夹板的轴线均和升降板垂直,弹簧测力计水平连接在竖向板甲和竖向板乙之间,其内端套入在横轴乙端面中间设置的柱形槽甲内,外端和竖向板乙连接。
优选的,所述的夹板支架上设有压力调节机构,该机构包括夹板支架外端设置的竖向板丙、调节螺栓、两端设有柱形槽乙、柱形槽丙的滑动轴,滑动轴滑动连接在竖向板乙中部设置的通孔内,竖向板丙的中部设有螺纹孔,调节螺栓插入在该螺纹孔内,调节螺栓的内端面设有插入到柱形槽丙内形成圆柱副的光轴,所述弹簧测力计的外端套入在柱形槽乙内。
优选的,所述竖向板甲的通孔内套有内侧面沿轴向设有限位槽甲的轴套甲,竖向板乙的通孔内套有内侧面沿轴向设有限位槽乙的轴套乙,横轴乙匹配套入在轴套甲内且横轴乙的侧面设有滑动连接在限位槽甲内的限位键甲,滑动轴匹配套入在轴套乙内且滑动轴的侧面设有滑动连接在限位槽乙内的限位键乙。
优选的,所述升降板的上表面中间设有滑轨,夹板支架的底面中间设有和滑轨滑动连接的滑槽,夹板支架的两侧均设有长圆孔,升降板两侧设置的螺纹孔内插入有定位螺栓,定位螺栓位于长圆孔内。
优选的,所述的试验台上设有用于记录物块运行状态的高速摄像系统,用于逮捉物块在夹具上产生相对滑移的时点。
优选的,所述夹具正下方的横向升降板上设有海绵垫或橡胶垫。
优选的,所述弧形夹板甲和弧形夹板乙的内侧面均设有软质垫片。
优选的,该试验装置的直线模组驱动器的控制系统实时记录直线模组上摩擦力测量组件的加速度等参数变化,高速摄像系统记录状态变化的时点,并与记录直线模组上摩擦力测量组件的加速度等参数变化的时点自动关联。
本发明的有益技术效果是:
该实验装置的摩擦力测量组件上设有模仿机械手的夹具,物块被夹紧在夹具的两弧形夹板之间,弧形夹板内侧面的软质垫片可设置不同的材料及纹理来改变摩擦力的大小,测量装置上还设有测量物块所受横向夹紧力(法向力)的弹簧测力计,通过试验台上竖向设置的直线模组驱动摩擦力测量组件快速升降产生加速度;因此,该试验装置能够完成物块在不同加速度、不同夹具表面材料及纹理等条件下的物块临界状态摩擦力测量试验,记录物块的质量、加速度以及物块所受的法向力,根据牛顿第二定律,即可计算出机械手表面的摩擦系数,通过对不同材料及纹理的夹具的摩擦系数进行对比总结,选出机械手表面最合适的材料及纹理;该试验装置结构简单、便于操作,使机械手摩擦系数的测量更加简便。
该试验装置的直线模组驱动器的控制系统设置有不同的加速度规律控制模块,可以根据需要输出不同的加速度,并实时记录直线模组上摩擦力测量组件的加速度等参数变化。试验台上设置的高速摄像系统,用于记录被夹持物块的运动状态,捕捉物块在夹具上产生相对滑移的时点。且高速摄像系统记录状态变化的时点与记录直线模组上摩擦力测量组件的加速度等参数变化的时点自动关联。
该试验装置的夹具上设有压力调节机构,通过转动调节螺栓即可调整物块受到夹具的夹紧力(法向力)大小,调节螺栓通过滑动轴、限位键、轴套对弹簧测力计施加轴向力,避免调节过程中滑动轴转动导致弹簧测力计随之转动,使弹簧测力计始终处于水平状态,便于试验人员观测压力值。
附图说明
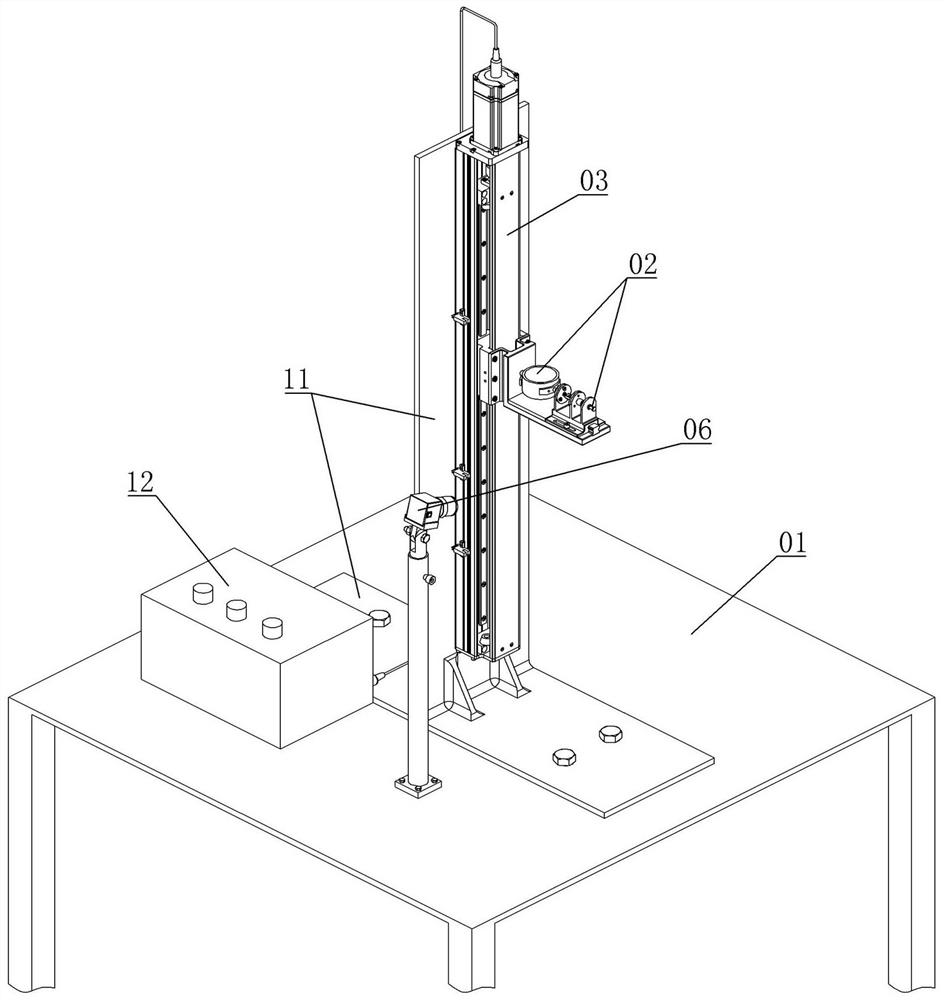
图1是本发明的立体结构示意图;
图2是本发明的主视结构示意图;
图3是本发明摩擦力测量组件的立体结构示意图;
图4是本发明摩擦力测量组件的俯视结构示意图;
图5是图4的A-A向剖视结构示意图;
图6是图5的B-B向剖视结构示意图;
图7是图5的C-C向剖视结构示意图;
图8是本发明软质垫片的内侧表面设为光滑表面的示意图;
图9是本发明软质垫片的内侧表面设为凸粒表面的示意图;
图10是本发明软质垫片的内侧表面设为网文表面的示意图;
图11是本发明的直线模组的立体结构示意图;
图12是沿着图11中丝杠的轴线的剖视结构示意图;
图13是图12的C-C向剖视图。
图中,01.试验台、11.倒T形支架、12.加速度规律控制模块、02. 摩擦力测量组件、21.升降板、211.滑轨、22.竖向支座、23.弧形夹板甲、231.横轴甲、24.弧形夹板乙、241.横轴乙、242.柱形槽甲、25.夹板支架、251.竖向板甲、252.竖向板乙、253.竖向板丙、254.螺纹孔、 255.滑槽、256.长圆孔、257.定位螺栓、26.调节螺栓、261.光轴、27. 滑动轴、271.柱形槽乙、272.柱形槽丙、28.轴套甲、281.限位槽甲、 282.限位键甲、29.轴套乙、291.限位槽乙、292.限位键乙、03.直线模组、31.螺母滑块、32.滑轨、33.丝杠、34.电机、04.圆柱类工件、05. 弹簧测力计、06.高速摄像系统、07.海绵垫或橡胶垫、08.软质垫片。
具体实施方式
实施例一,参见说明书附图1-12,一种机器人抓手快速抓取时摩擦力情况分析试验装置,包括通过倒T形支架竖向安装在试验台上方的直线模组,直线模组的螺母滑块上固定连接有摩擦力测量组件,通过螺母滑块驱动摩擦力测量组件快速上升或下降;所述的直线模组由电机、丝杠、螺母滑块、滑轨等部件组成,电机驱动丝杠转动,丝杠驱动螺母滑块沿着滑轨滑动。
摩擦力测量组件包括升降板,升降板通过其内端设置的竖向支座水平固定连接在螺母滑块的外侧面,升降板的上表面设有用于夹紧圆筒形物块的夹具,夹具内设有用于测量夹紧力的弹簧测力计。
所述的夹具包括相对设置的弧形夹板甲和弧形夹板乙,升降板的上表面设有夹板支架,夹板支架的内端和中间依次设有竖向板甲、竖向板乙,弧形夹板甲通过其外侧面中间设置的横轴甲和竖向支座固定连接,弧形夹板乙通过其外侧面中间设置的横轴乙滑动连接在竖向板甲中部的通孔内,两弧形夹板的轴线均和升降板垂直,夹持工件后使其处于竖直状态,弹簧测力计水平连接在竖向板甲和竖向板乙之间,其内端套入在横轴乙端面中间设置的柱形槽甲内,外端和竖向板乙连接;该夹具针对发明名称为:圆柱面内壁工件的支撑式抓取与套模下压机械手(申请号:2017103564669)的发明专利中提到的圆柱类工件的夹持。
弧形夹板甲和弧形夹板乙的内侧面均设有软质垫片,软质垫片可设为不同材质,同时软质垫片的内侧表面设为光滑表面(参见附图8)、凸粒表面(参见附图9)或网纹表面(参见附图10),不同材质或不同纹理的内侧表面可改变夹具(机械手)摩擦力的大小,通过实验选择出最合适的材料及纹理的软质垫片。
所述的夹板支架上设有压力调节机构,该机构包括夹板支架外端设置的竖向板丙、调节螺栓、两端设有柱形槽乙、柱形槽丙的滑动轴,滑动轴滑动连接在竖向板乙中部设置的通孔内,竖向板丙的中部设有螺纹孔,调节螺栓插入在该螺纹孔内,调节螺栓的内端面设有插入到柱形槽丙内形成圆柱副的光轴,所述弹簧测力计的外端套入在柱形槽乙内,转动调节螺栓可通过弹簧测力计调整弧形夹板的夹紧力大小。
所述竖向板甲的通孔内套有内侧面沿轴向设有限位槽甲的轴套甲,竖向板乙的通孔内套有内侧面沿轴向设有限位槽乙的轴套乙,横轴乙匹配套入在轴套甲内且横轴乙的侧面设有滑动连接在限位槽甲内的限位键甲,该限位键甲用于避免横轴乙在轴套甲内转动,滑动轴匹配套入在轴套乙内且滑动轴的侧面设有滑动连接在限位槽乙内的限位键乙。
所述升降板的上表面中间设有滑轨,夹板支架的底面中间设有和滑轨滑动连接的滑槽,夹板支架的两侧均设有长圆孔,升降板两侧设置的螺纹孔内插入有定位螺栓,定位螺栓位于长圆孔内,夹板支架和升降板之间的滑动连接结构用于调整夹具开口的大小,可适应不同尺寸的工件的摩擦力情况分析。
所述的试验台上设有用于记录物块运行状态的高速摄像系统,用于逮捉物块在夹具上产生相对滑移的时点,所述夹具正下方的横向升降板上设有海绵垫或橡胶垫,海绵垫或橡胶垫用来缓冲物块掉落的冲击力,起到保护工件的作用。
本发明的工作过程和原理是:
试验时,将圆柱类工件竖向夹紧在夹具的两弧形夹板之间,两弧形夹板内侧面的软质垫片采用不同的材料及纹理来改变对工件施加摩擦力的大小,测量装置上的弹簧测力计用于测量物块所受的横向夹紧力(法向力),转动手动螺栓调整物块受到法向力的大小。通过直线模组驱动摩擦力测量组件快速升降产生加速度,通过该试验装置能够完成物块在不同加速度、不同夹具表面材料及纹理等条件下的物块临界状态摩擦力测量试验,记录物块的质量、加速度以及物块所受的法向力,根据牛顿第二定律即可计算出机械手表面的摩擦系数,计算公式为2μFn≥mg+ma,通过对不同材料及纹理的夹具的摩擦系数进行对比总结,选出机械手表面最合适的材料及纹理。
实施例二,试验台上设有和直线模组驱动器的控制系统连接的加速度规律控制模块,该模块行可设置数据接口来传输运动数据,可以根据需要输出不同的加速度规律。
下表所示的通用简谐梯形加速度运动规律将等速运动曲线、等加速度曲线及简谐曲线组合在一起,充分利用各自的优点,通过选择不同的T
将曲线由7段组成,其加速度表达式为
如下表,选择不同的T
表1通用简谐梯形曲线中常见曲线所对应的T
在直线模组驱动器的控制系统中,按照这些参数对应的加速度规律编制有控制曲线。并根据相应的控制模型转化为运动模组上下运动速度的变化,最终形成摩擦力测量组件升降运动的不同加速度运动。
- 机器人抓手快速抓取时摩擦力情况分析试验装置
- 带防护罩的抓手模块及含有该抓手模块的抓取机器人