一种应用于智能马桶的脚踢型磁悬浮感应器
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及智能马桶感应器技术领域,具体为一种应用于智能马桶的脚踢型磁悬浮感应器。
背景技术
智能坐便器起源于美国,用于医疗和老年保健,最初设置有温水洗净功能。后经韩国,日本的卫浴公司逐渐引进技术开始制造,加入了座便盖加热、温水洗净、暖风干燥、杀菌等多种功能。目前市场上的智能坐便器大体上分为三种,一种为带清洗、加热、杀菌等的智能坐便器,一种为可自动换套的智能坐便器,另外一种是自动换套加清洗功能智能座便器。
经检索,中国专利号CN201921863864.0,公开了一种智能马桶感应器,包括:本体,呈中空状,具有外螺纹;感应器组件,形成一个整体模块能拆卸地装接在所述本体中;螺母,与所述本体的外螺纹螺纹连接以将所述本体固定在安装座上。优选的,所述感应器组件与所述本体之间通过螺纹连接相配合。优选的,所述感应器组件包括中空罩体,电路板、设于所述电路板上的感应灯……
上述装置解决的主要技术问题为通过将感应器组件设计为一个整体模块,使得该整体模块能拆卸地装接在本体中,从而大大方便了对感应器组件的安装和维修更方便,结构简单,且安装后的稳定性较好,但在实际应用中,感应器大多数通过螺栓安装在马桶壁上,稳定性较强不会发生脱落,但是感应器对物体的感应能力却较差,传统的马桶脚踢感应器大多数为红外感应器,对大部分物体都有所感应,导致感应效果差,经常容易发生误触,并且功耗较大,而且感应模式大多数功能单一,为此,我们提出一种应用于智能马桶的脚踢型磁悬浮感应器。
发明内容
本发明的目的在于提供一种应用于智能马桶的脚踢型磁悬浮感应器,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种应用于智能马桶的脚踢型磁悬浮感应器,包括磁悬浮底座、感应器壳体和电池,所述磁悬浮底座的表面安装有感应器壳体,所述感应器壳体的内部固定连接有控制芯片,所述感应器壳体的内部安装有电池。
优选的,所述控制芯片通过电连接电池。
优选的,所述控制芯片的输入电压为12V,所述电池的输出电压为12V,所述电池为可拆卸式安装。
优选的,所述控制芯片的型号为JH-CXF1280,所述控制芯片包括磁场感应模块、磁场感应动作处理模块、磁场感应动作命令模块和控制信号传输模块。
优选的,所述磁场感应模块仅可感应人体微弱磁场。
优选的,所述控制芯片的运行流程通过磁场感应模块的感应信息进行判断,所述磁场感应模块通过判断用户脚踢动作磁场轨迹进行识别;
当用户脚踢动作磁场轨迹为:脚部从远向近靠近并停留三秒,所述磁场感应模块识别到磁场从远向近靠近并停留三秒,所述磁场感应模块再将识别到的磁场信号信息传输到磁场感应动作处理模块内,通过磁场感应动作处理模块对感应信息进行处理并传输到磁场感应动作命令模块内,通过所述磁场感应动作命令模块对处理信息进行识别并对应到相应的工作命令如自动烘干,所述磁场感应动作命令模块再将此工作命令通过所述控制信号传输模块传输到智能马桶控制器内使得智能马桶工作;
当用户脚踢动作磁场轨迹为:脚部从远向近靠近并迅速返回,所述磁场感应模块识别到磁场从远向近靠近并并迅速返回,所述磁场感应模块再将识别到的磁场信号信息传输到磁场感应动作处理模块内,通过磁场感应动作处理模块对感应信息进行处理并传输到磁场感应动作命令模块内,通过所述磁场感应动作命令模块对处理信息进行识别并对应到相应的工作命令如大便冲水,所述磁场感应动作命令模块再将此工作命令通过所述控制信号传输模块传输到智能马桶控制器内使得智能马桶工作;
当用户脚踢动作磁场轨迹为:脚部从左向右靠近,所述磁场感应模块识别到磁场从左向右靠近,所述磁场感应模块再将识别到的磁场信号信息传输到磁场感应动作处理模块内,通过磁场感应动作处理模块对感应信息进行处理并传输到磁场感应动作命令模块内,通过所述磁场感应动作命令模块对处理信息进行识别并对应到相应的工作命令如小便冲水,所述磁场感应动作命令模块再将此工作命令通过所述控制信号传输模块传输到智能马桶控制器内使得智能马桶工作;
当用户脚踢动作磁场轨迹为:脚部从右向左靠近,所述磁场感应模块识别到磁场从右向左靠近,所述磁场感应模块再将识别到的磁场信号信息传输到磁场感应动作处理模块内,通过磁场感应动作处理模块对感应信息进行处理并传输到磁场感应动作命令模块内,通过所述磁场感应动作命令模块对处理信息进行识别并对应到相应的工作命令如马桶自洁,所述磁场感应动作命令模块再将此工作命令通过所述控制信号传输模块传输到智能马桶控制器内使得智能马桶工作。
优选的,所述磁场感应模块的磁场感应动作可以进行更改设置或自定义,所述磁场感应动作命令模块对应的工作命令可以进行更改设置或自定义。
与现有技术相比,本发明的有益效果是:
1、本装置通过磁悬浮感应器仅可感应人体微弱磁场,无法感知其他物体,使得感应器的感应精确度提高,改善了传统红外感应器对被检测物体因颜色、光线、材质的差异,而导致无法检测的问题;
2、本装置的输入电压仅为12V,并且采用可拆卸式的电池进行功能,低耗节能;
3、本装置的内部设置多种感应方式,提高了感应动作的丰富性,实现了功能多样化,并且感应方式还支持自定义设置,提高了使用的便捷性。
附图说明
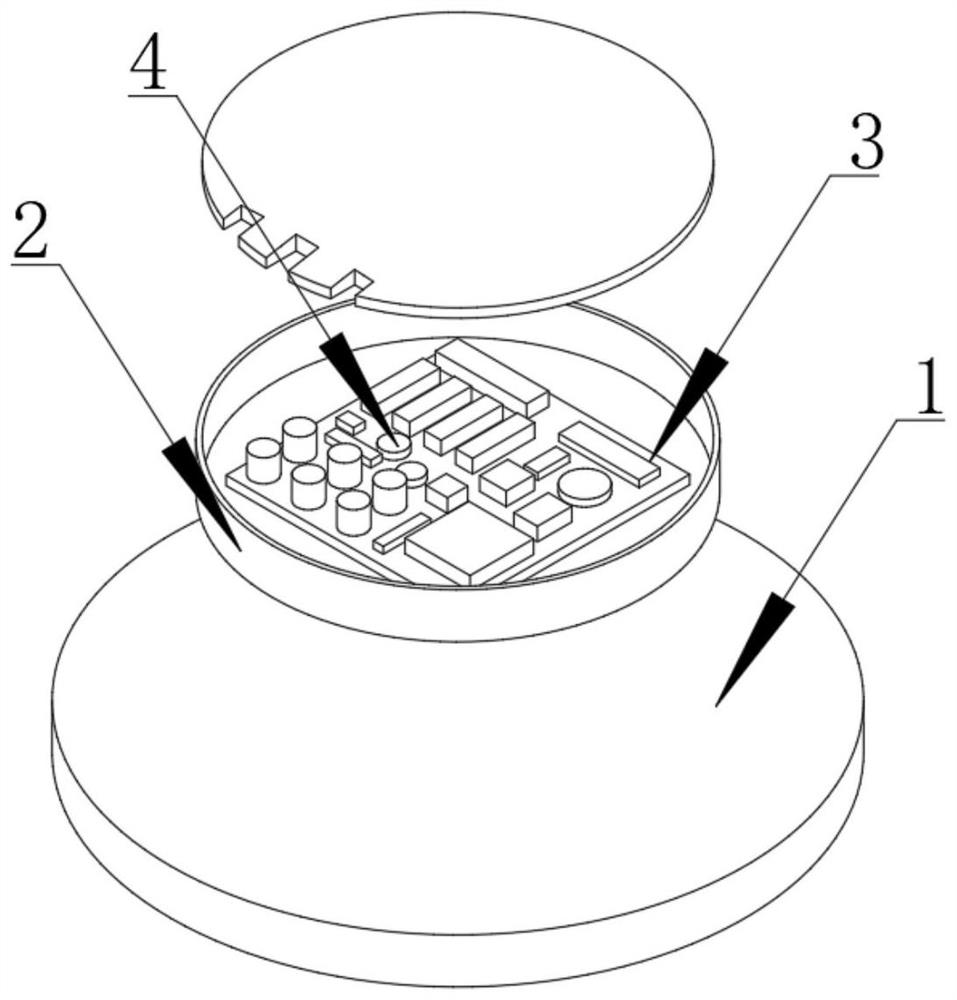
图1为本发明结构爆炸示意图;
图2为本发明结构示意图;
图3为本发明结构俯视示意图;
图4为本发明结构正视示意图;
图5为本发明控制芯片结构组成示意图;
图6为本发明控制芯片结构运行流程示意图。
图中:1、磁悬浮底座;2、感应器壳体;3、控制芯片;301、磁场感应模块;302、磁场感应动作处理模块;303、磁场感应动作命令模块;304、控制信号传输模块;4、电池。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
请参阅图1-6,本发明提供一种技术方案:
一种应用于智能马桶的脚踢型磁悬浮感应器,包括磁悬浮底座1、感应器壳体2和电池4,其特征在于:磁悬浮底座1的表面安装有感应器壳体2,感应器壳体2的内部固定连接有控制芯片3,感应器壳体2的内部安装有电池4,本装置的结构简单,安装方式方便。
实施例二
在实施例一的基础上,本发明提供一种技术方案:
一种应用于智能马桶的脚踢型磁悬浮感应器,包括磁悬浮底座1、感应器壳体2和电池4,控制芯片3通过电连接电池4,通过电池4对控制芯片3进行供电,使得控制芯片3可以长时间运行,提高续航能力;
控制芯片3的输入电压为12V,电池4的输出电压为12V,电池4为可拆卸式安装,通过电池4的安装方式为可拆卸式,提高了安装使用的便捷性,同时控制芯片3的输入电压为12V,低耗节能,进一步提高了续航能力;
控制芯片3的型号为JH-CXF1280,控制芯片3包括磁场感应模块301、磁场感应动作处理模块302、磁场感应动作命令模块303和控制信号传输模块304,通过磁场感应模块301对人体磁场进行感应,同时感应人体磁场的动作变化轨迹,将感应到的数据传输到磁场感应动作处理模块302内,通过磁场感应动作处理模块302进行处理并传输到磁场感应动作命令模块303内转化为对应的操作命令,再通过控制信号传输模块304将磁场感应动作命令模块303的动作命令传输到智能马桶控制器内,实现智能马桶的感应操作;
磁场感应模块301仅可感应人体微弱磁场,无法感知其他物体,使得感应器的感应精确度提高,改善了传统红外感应器对被检测物体因颜色、光线、材质的差异,而导致无法检测的问题;
控制芯片3的运行流程通过磁场感应模块301的感应信息进行判断,磁场感应模块301通过判断用户脚踢动作磁场轨迹进行识别;
当用户脚踢动作磁场轨迹为:脚部从远向近靠近并停留三秒,磁场感应模块301识别到磁场从远向近靠近并停留三秒,磁场感应模块301再将识别到的磁场信号信息传输到磁场感应动作处理模块302内,通过磁场感应动作处理模块302对感应信息进行处理并传输到磁场感应动作命令模块303内,通过磁场感应动作命令模块303对处理信息进行识别并对应到相应的工作命令如自动烘干,磁场感应动作命令模块303再将此工作命令通过控制信号传输模块304传输到智能马桶控制器内使得智能马桶工作;
当用户脚踢动作磁场轨迹为:脚部从远向近靠近并迅速返回,磁场感应模块301识别到磁场从远向近靠近并并迅速返回,磁场感应模块301再将识别到的磁场信号信息传输到磁场感应动作处理模块302内,通过磁场感应动作处理模块302对感应信息进行处理并传输到磁场感应动作命令模块303内,通过磁场感应动作命令模块303对处理信息进行识别并对应到相应的工作命令如大便冲水,磁场感应动作命令模块303再将此工作命令通过控制信号传输模块304传输到智能马桶控制器内使得智能马桶工作;
当用户脚踢动作磁场轨迹为:脚部从左向右靠近,磁场感应模块301识别到磁场从左向右靠近,磁场感应模块301再将识别到的磁场信号信息传输到磁场感应动作处理模块302内,通过磁场感应动作处理模块302对感应信息进行处理并传输到磁场感应动作命令模块303内,通过磁场感应动作命令模块303对处理信息进行识别并对应到相应的工作命令如小便冲水,磁场感应动作命令模块303再将此工作命令通过控制信号传输模块304传输到智能马桶控制器内使得智能马桶工作;
当用户脚踢动作磁场轨迹为:脚部从右向左靠近,磁场感应模块301识别到磁场从右向左靠近,磁场感应模块301再将识别到的磁场信号信息传输到磁场感应动作处理模块302内,通过磁场感应动作处理模块302对感应信息进行处理并传输到磁场感应动作命令模块303内,通过磁场感应动作命令模块303对处理信息进行识别并对应到相应的工作命令如马桶自洁,磁场感应动作命令模块303再将此工作命令通过控制信号传输模块304传输到智能马桶控制器内使得智能马桶工作;
磁场感应模块301的磁场感应动作可以进行更改设置或自定义,磁场感应动作命令模块303对应的工作命令可以进行更改设置或自定义,提高了使用的便捷性。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种应用于智能马桶的脚踢型磁悬浮感应器
- 一种应用于马桶的静电感应器