一种电子多臂错花自停报警装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明属于纺织电气控制技术领域,具体涉及一种电子多臂错花自停报警装置。
背景技术
电子多臂开口装置由于具有高速、稳定、织造多样的特点,在纺织领域得到了广泛使用。在电子多臂开口装置中,电子多臂控制器发送信号给多臂电磁铁,执行机构基于电磁铁信号动作,实现综框的提升与降落,完成织物织造。
随着国内高速织机性能的不断提高,现有织机通常都是一年365天,一天24小时高速运行,其中控制经纱上下开口的电子多臂提综动作一年运作的次数大概为2亿次,而且在运行过程中每片提综臂所挂的经纱数量不等,会导致电子多臂无法平衡工作,这种高强度的长期连续不平衡运行难免会使零部件出现磨损,而即便是在零件磨损初期也会偶尔出现某片提综动作失误的情况,使布面产生疵品。
在生产车间,一个挡车工都需要看守多台织机,而在多臂机偶尔提综失误后,只要织机引纬正常和无断经,织机都不会自动停机,因此当失误被发现时很多时候都已织出很多布了,这时候若通过织机寻纬拆布则费时费力,影响织布效率和工期,若不拆布则又会影响布面质量,严重时还会导致整批布报废,致使用户损失巨大。如果能够在多臂提综出现失误时立刻通知织机停机,挡车工及时拆除错误纬纱,这样就能在很短的时间内解决布面问题,大大提高布面质量和织布的工作效率,减少不必要的损失。为此,本申请人作了有益的设计,下面将要介绍的技术方案便是在这种背景下产生的。
发明内容
本发明的目的在于提供一种电子多臂错花自停报警装置,能够在多臂提综出现失误时,方便工作人员快速排查问题,提高作业效率。
本发明的目的是这样来达到的,一种电子多臂错花自停报警装置,其特征在于:包括电子多臂错花报警模块和传感器检测模块,所述的电子多臂错花报警模块安装在电子多臂机的机座的端部外侧,包括CPLD逻辑电路、系统复位电路、C1C2信号输入电路、电磁铁驱动电路、传感器信号输入电路以及报警停车继电器信号输出电路,系统复位电路、C1C2信号输入电路、电磁铁驱动电路、传感器信号输入电路以及报警停车继电器信号输出电路分别与CPLD逻辑电路连接,传感器信号输入电路与传感器检测模块连接,所述的传感器检测模块包括霍尔传感器,霍尔传感器与磁钢配合,用于检测多臂提综连杆信号,霍尔传感器安装在电子多臂机的连杆槽钢内,并位于多臂提综连杆的上方,所述的磁钢吸附于多臂提综连杆的上方,并对准霍尔传感器的位置。
在本发明的一个具体的实施例中,所述的CPLD逻辑电路包括CPLD芯片U1、晶振电路以及程序下载电路,所述的CPLD芯片U1采用ALTERA公司MAX II系列的EMP570T100C5芯片,所述的晶振电路包括晶振Y1、第一电容C1、第一电阻R1以及第一接口JP1,晶振Y1的1脚连接第一电阻R1的一端,晶振Y1的3脚连接第一接口JP1的1、3、5、7脚,第一接口JP1的2脚连接CPLD芯片U1的14脚,第一接口JP1的4脚连接CPLD芯片U1的12脚,第一接口JP1的6脚连接CPLD芯片U1的62脚,第一接口JP1的8脚连接CPLD芯片U1的64脚,所述的程序下载电路包括JTAG接口J、第二电阻R2、第三电阻R3、第四电阻R4以及第五电阻R5,JTAG接口J的1脚与第五电阻R1的一端共同连接CPLD芯片U1的24脚,JTAG接口J的3脚与第二电阻R2的一端共同连接CPLD芯片U1的25脚,JTAG接口J的5脚与第三电阻R3的一端共同连接CPLD芯片U1的22脚,JTAG接口J的9脚与第四电阻R4的一端共同连接CPLD芯片U1的23脚,晶振Y1的4脚、第一电阻R1的另一端、第一电容C1的一端、第二电阻R2的另一端、第三电阻R3的另一端、第四电阻R4的另一端、JTAG接口J的4脚以及CPLD芯片U1的9、13、31、39、45、59、63、80、88、94共同连接3.3V直流电源,晶振Y1的2脚、第一电容C1的另一端、JTAG接口J的2、10脚以及CPLD芯片U1的10、11、32、39、46、60、65、79、90、93共同接地。
在本发明的另一个具体的实施例中,所述的系统复位电路包括第一插头J1、第一二极管D1、第二二极管D2、第三二极管D3、第一发光二极管LED1、第一稳压二极管ZD1、第二电容C2、第三电容C3、第四电容C4、第六电阻R6、第七电阻R7、第一复位开关S1、第二复位开关S2以及第一光耦TL1,所述的第一光耦TL1采用TLP521-1,第一插头J1为接线插头,第一光耦TL1的1脚连接第二电容C2的一端以及第一稳压二极管ZD1的正极,第二电容C2的另一端连接第一光耦TL1的2脚、第一复位开关S1的一端、第一插头J1的2脚、第一二极管D1的正极、第二二极管D2的正极、第三二极管D3的正极以及第一发光二极管LED1的负极,第一二极管D1的负极、第二二极管D2的负极及第三二极管D3的负极接织机信号,第一发光二极管LED1的正极连接第六电阻R6的一端,第一光耦TL1的4脚与第七电阻R7的一端、第三电容C3的一端、第二复位开关S2的一端、第四电容C4的正极连接,并共同连接至所述的CPLD逻辑电路,第六电阻R6的另一端和第一稳压二极管ZD1的负极共同连接+24V直流电源,第七电阻R7的另一端连接+3.3V直流电源,第一复位开关S1的另一端、第一插头J1的1脚、第一光耦TL1的3脚、第三电容C3的另一端、第二复位开关S2的另一端及第四电容C4的负极共同接地。
在本发明的又一个具体的实施例中,所述的C1C2信号输入电路包括第二发光二极管LED2、第三发光二极管LED3、第四发光二极管LED4、第八电阻R8、第九电阻R9、第十电阻R10、第十一电阻R11、第十二电阻R12、第二光耦TL2以及第三光耦TL3,所述的第二光耦TL2和第三光耦TL3采用TLP521-1,第二光耦TL2的1脚连接第三发光二极管LED3的负极,第三发光二极管LED3的正极连接第十一电阻R11的一端,第二光耦TL2的2脚连接C1信号,第二光耦TL2的4脚连接第十电阻R10的一端,第二光耦TL2的1脚连接第三发光二极管LED3的负极,第三发光二极管LED3的正极连接第十一电阻R11的一端,第三光耦TL3的1脚连接第四发光二极管LED4的负极,第四发光二极管LED4的正极连接第十二电阻R12的一端,第三光耦TL3的2脚连接C2信号,所述的C1、C2信号为系统工作的时序信号,第三光耦TL3的4脚连接第九电阻R9的一端,第八电阻R8的一端连接所述的CPLD逻辑电路,第八电阻R8的另一端连接第二发光二极管LED2的负极,第二发光二极管LED2的正极、第九电阻R9的另一端以及第十电阻R10的另一端共同接+3.3V直流电源,第十一电阻R11的另一端和第十二电阻R12的另一端共同接+24V直流电源,第二光耦TL2的3脚和第三光耦TL3的3脚共同接地。
在本发明的再一个具体的实施例中,所述的电磁铁驱动电路包括第四光耦TL4、驱动芯片U2、第十三电阻R13、第十四电阻R14、第十五电阻R15、第十六电阻R16以及第二稳压二极管ZD2,所述的第四光耦TL4采用TLP521-4,所述的驱动芯片U2采用ULN2803,第四光耦TL4的1脚连接第十三电阻R13的一端,第十三电阻R13的另一端连接第二稳压二极管ZD2的正极,第四光耦TL4的2脚与3脚连接,第四光耦TL4的4脚连接多臂控制器,第四光耦TL4的14脚连接第十四电阻R14的一端,并共同连接至所述的CPLD逻辑电路U1的第83引脚,第四光耦TL4的15脚连接第十五电阻R15的一端,并共同连接驱动芯片U2的1脚,驱动芯片U2的18脚连接多臂电磁铁,第四光耦TL4的16脚连接第十六电阻R16的一端,第二稳压二极管ZD2的负极和第十六电阻R16的另一端共同接+24V直流电源,第十四电阻R14的另一端接+3.3V直流电源,第十五电阻R15的另一端接地。
在本发明的还有一个具体的实施例中,所述的传感器信号输入电路包括第三稳压二极管ZD3、第十七电阻R17、第十八电阻R18、第十九电阻R19、第五电容C5以及第五光耦TL5,所述的第五光耦TL5采用TLP281-4,第五光耦TL5的1脚连接第十七电阻R17的一端,第十七电阻R17的另一端连接第三稳压二极管ZD3的正极,第五光耦TL5的2脚接收传感器信号,第五光耦TL5的16脚与第十八电阻R18的一端及第十九电阻R19的一端连接,第十九电阻R19的另一端与第五电容C5的一端连接并共同连接至所述的CPLD逻辑电路U1的第1引脚,第三稳压二极管ZD3的负极连接+24V直流电源,第十八电阻R18的另一端接+3.3V直流电源,第五光耦TL5的15脚与第五电容C5的另一端共同接地。
在本发明的进而一个具体的实施例中,所述的报警停车继电器信号输出电路包括继电器RLY1、第四二极管D4、第五发光二极管LED5、第二十电阻R20、第二十一电阻R21、第二十二电阻R22以及三极管Q1,所述的第二十一电阻R21的一端连接所述的CPLD逻辑电路,第二十一电阻R21的另一端与第二十二电阻R22的一端及三极管Q1的基极连接,三极管Q1的集电极与第二十电阻R20的一端、第四二极管D4的正极以及继电器RLY1的线圈的一端连接,第二十电阻R20的另一端连接第五发光二极管LED5的负极,继电器RLY1的动、静触点连接至织机,第五发光二极管LED5的正极、第四二极管D4的负极及继电器RLY1的线圈的另一端共同接+24V直流电源,第二十二电阻R22的另一端及三极管Q1的发射极共同接地。
在本发明的更而一个具体的实施例中,还包括报警指示灯电路,所述的报警指示灯电路包括一路多起指示灯、一路少起指示灯及多路出错报警指示灯,每个出错报警指示灯对应一片多臂提综连杆。
在本发明的又进而一个具体的实施例中,所述的传感器检测模块还包括第六发光二极管LED6、第二十三电阻R23以及第二十四电阻R24,霍尔传感器即为霍尔传感器H1,霍尔传感器H1的输出端与第六发光二极管LED6的负极及第二十四电阻R24的一端连接,并共同与电子多臂错花报警模块的传感器信号输入电路连接,第六发光二极管LED6的正极与第二十三电阻R23的一端连接,第二十三电阻R23的另一端及霍尔传感器H1的正电源端共同连接+24V直流电源,霍尔传感器H1的负电源端接地。
在本发明的又更而一个具体的实施例中,还包括电源电路,所述的电源电路从电子多臂控制器获得24V电源。
本发明由于采用了上述结构,与现有技术相比,具有的有益效果是:可作为运行多年的电子多臂机的辅助装置,能够在多臂提综出现失误时立刻通知织机停机,使得挡车工能够及时拆除错误纬纱,在很短的时间内解决布面问题,大大提高布面质量和织布的工作效率,减少不必要的损失;采用内部C1C2信号使得检测系统与电子多臂控制器的工作时序完全同步,避免出现误报警;可同时进行多路电子多臂的检测,适应不同片数多臂机的使用要求;电源电路直接采用多臂控制器的电源,从而无需再安装一个电源装置,节省成本并使安装非常简便;错花报警模块安装于多臂机机座端部外侧,设置高度与挡车工视线平齐,方便工作人员观察报警指示灯的状态。
附图说明
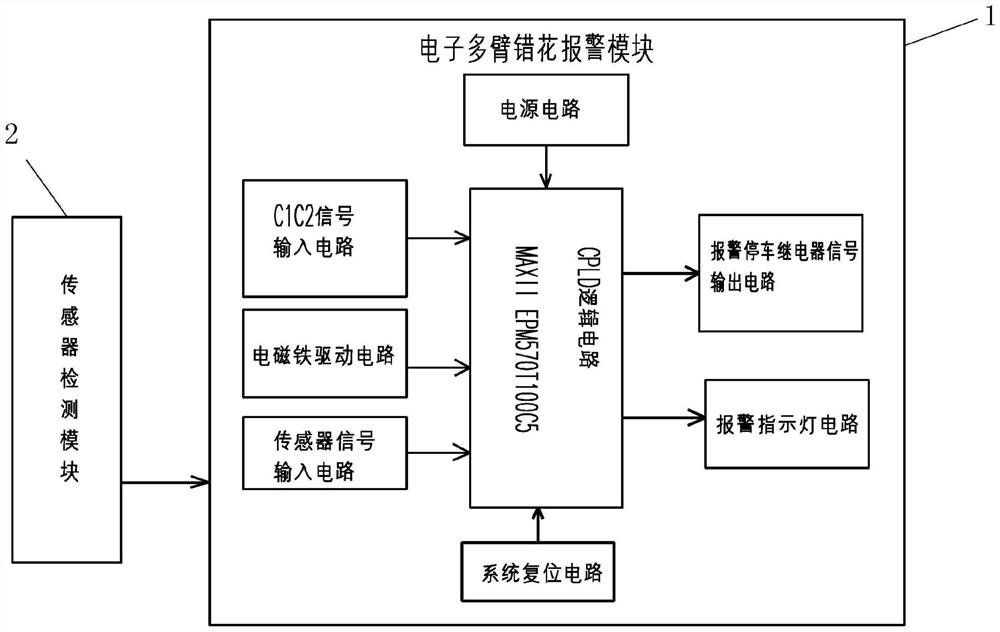
图1为本发明的电原理框图。
图2为本发明所述的CPLD逻辑电路的电连接示意图。
图3为本发明所述的系统复位电路的电连接示意图。
图4为本发明所述的C1C2信号输入电路的电连接示意图。
图5为本发明所述的电磁铁驱动电路的电连接示意图。
图6为本发明所述的传感器信号输入电路的电连接示意图。
图7为本发明所述的报警停车继电器信号输出电路的电连接示意图。
图8为本发明所述的报警指示灯电路的电连接示意图。
图9为本发明所述的传感器检测电路的电连接示意图。
图10为本发明所述的电源电路的电连接示意图。
图11为本发明所述的电子多臂错花报警模块的前面板示意图。
图12为本发明所述的电子多臂错花报警模块的后面板示意图。
图13为本发明所述的传感器检测模块的示意图。
图14为本发明所述的电子多臂错花报警模块的安装示意图。
图15为本发明所述的传感器检测模块的安装示意图。
具体实施方式
下面结合附图对本发明的具体实施方式详细描述,但对实施例的描述不是对技术方案的限制,任何依据本发明构思作形式而非实质的变化都应当视为本发明的保护范围。
在下面描述中凡是涉及上、下、左、右、前和后的方向性(或者称方位性)的概念均是针对正在被描述的图所处的位置状态而言的,目的在于方便公众理解,因而不能将其理解为对本发明提供的技术方案的特别限定。
请参阅图1并结合图11~图15,本发明涉及一种电子多臂错花自停报警装置,作为电子多臂装置的辅助装置,用于原来的电子多臂控制器和多臂电磁铁之间信号的侦查。所述的电子多臂错花自停报警装置包括电子多臂错花报警模块1和传感器检测模块2,所述的电子多臂错花报警模块1安装在电子多臂机3的机座31的端部外侧,其外壳采用铝合金型材一体成型,具有前面板11和后面板12,如图11和图12所示。电子多臂错花报警模块1包括CPLD逻辑电路、系统复位电路、C1C2信号输入电路、电磁铁驱动电路、传感器信号输入电路、报警停车继电器信号输出电路及报警指示灯电路。所述的传感器检测模块2包括霍尔传感器21,霍尔传感器21与磁钢4配合,用于检测多臂提综连杆信号。
具体的,所述的电子多臂机3的机座31支撑连杆槽钢32,连杆槽钢32内设有多臂提综连杆33。连杆槽钢32在两侧壁的内侧,面对面设有一对安装板321,在一对安装板321之间设置有安装架322,安装架322的长度方向的两端设有固定条323,所述的固定条323上沿高度方向设有插槽3231,所述的传感器检测模块2的两端卡设在插槽3231内。
使霍尔传感器21安装在连杆槽钢32内,并位于多臂提综连杆33的上方,所述的磁钢4吸附于多臂提综连杆33的上方,并对准霍尔传感器21的位置。
当电子多臂机3转到综平区域时,电子多臂控制器发送纹版信号给电子多臂错花报警模块1的CPLD逻辑电路进行缓存,同时通过电磁铁驱动电路使电磁铁带动多臂机构动作。当多臂机转到开口最大时,传感器检测模块2检测多臂提综连杆33的位置信号,并与前面缓存在CPLD逻辑电路中的纹版信号进行逻辑运算,当某路的纹版信号与检测到的多臂提综连杆33的位置信号不一致时,报警停车继电器信号输出电路发出一个报警联锁信号给织机,使织机能及时停车,并使相应通道的报警灯亮起,综框多起或者少起的报警指示灯同时被点亮,方便工作人员有针对性地进行检查。本发明可同时进行二十路电子多臂的检测,适应不同片数多臂机的使用要求。
请参阅图2,所述的CPLD逻辑电路包括CPLD芯片U1、晶振电路以及程序下载电路。所述的CPLD芯片U1采用ALTERA公司MAX II系列的EMP570T100C5芯片。所述的晶振电路包括晶振Y1、第一电容C1、第一电阻R1以及第一接口JP1,晶振Y1优选为50MHz。晶振Y1的1脚连接第一电阻R1的一端,晶振Y1的3脚连接第一接口JP1的1、3、5、7脚,第一接口JP1的2脚连接CPLD芯片U1的14脚,第一接口JP1的4脚连接CPLD芯片U1的12脚,第一接口JP1的6脚连接CPLD芯片U1的62脚,第一接口JP1的8脚连接CPLD芯片U1的64脚。所述的程序下载电路采用JTAG下载,包括JTAG接口J、第二电阻R2、第三电阻R3、第四电阻R4以及第五电阻R5。JTAG接口J的1脚与第五电阻R1的一端共同连接CPLD芯片U1的24脚,JTAG接口J的3脚与第二电阻R2的一端共同连接CPLD芯片U1的25脚,JTAG接口J的5脚与第三电阻R3的一端共同连接CPLD芯片U1的22脚,JTAG接口J的9脚与第四电阻R4的一端共同连接CPLD芯片U1的23脚。
请参阅图3,所述的系统复位电路包括第二插头J2、第一插头J1、第一二极管D1、第二二极管D2、第三二极管D3、第一发光二极管LED1、第一稳压二极管ZD1、第二电容C2、第三电容C3、第四电容C4、第六电阻R6、第七电阻R7、第一复位开关S1、第二复位开关S2以及第一光耦TL1,所述的第一光耦TL1采用TLP521-1,第二插头J2和第一插头J1为接线插头。所述的第一复位开关S1(图11上的111)设置在电子多臂错花报警模块1的前面板11上,按下第一复位开关S1,通过光耦隔离和滤波输出一个低电平信号给所述CPLD芯片U1的复位引脚(27脚)上,使系统复位。此时电子多臂错花报警模块1的各个报警信号,即各个报警指示灯全灭。该系统复位电路还可通过第一插头J1将第一复位开关S1安置于其他位置,方便人员操作,此处第一插头J1(图11上的112)设置于电子多臂错花报警模块1的前面板11上。所述的系统复位电路通过第二插头J2接入织机信号,所述的织机信号主要是织机的倒车信号。织机停车是停在平综区间的,然后倒车,此时由于已经将当前的纹版数据缓存在CPLD芯片U1中,倒车到达多臂最大开口时连杆信号执行的还是上一纬的信号动作,使得传感器检测模块2检测到的连杆信号与缓存的纹版信号不符,因此当织机倒车时先要将CPLD芯片U1进行复位,清除缓存。第二插头J2(图12上的121)设置在电子多臂错花报警模块1的后面板12上,织机倒车信号同样通过光耦隔离和滤波后输送到CPLD芯片U1的复位引脚上。所述的第二复位开关S2用作电子多臂错花报警模块1在通电调试阶段复位系统,方便操作,设置在CPLD芯片U1的附近。
请参阅图4,所述的C1C2信号输入电路包括第二发光二极管LED2、第三发光二极管LED3、第四发光二极管LED4、第八电阻R8、第九电阻R9、第十电阻R10、第十一电阻R11、第十二电阻R12、第二光耦TL2以及第三光耦TL3,所述的第二光耦TL2和第三光耦TL3采用TLP521-1。第二光耦TL2的2脚连接C1信号,第三光耦TL3的2脚连接C2信号,所述的C1、C2信号为系统工作的时序信号,通过电磁铁驱动电路接入。第二发光二极管LED2、第三发光二极管LED3及第四发光二极管LED4设置于电子多臂错花报警模块1的前面板11上,其中,第二发光二极管LED2为调试指示灯(图11上的113),第三发光二极管LED3为C1信号指示灯(图11上的114),第四发光二极管LED4为C2信号指示灯(图11上的115)。采用内部C1C2信号可以使错花报警系统与电子多臂控制器的工作时序完全同步,避免出现误报警。当C1信号为高电平,C2信号为低电平时,第三发光二极管LED3熄灭,第四发光二极管LED4点亮,多臂机处于平综位置区域,此时电子多臂控制器的纹版信号发送给电子多臂错花报警模块1,将纹版信号缓存于CPLD芯片U1中。当C1信号为低电平,C2为高电平时,第三发光二极管LED3点亮,第四发光二极管LED4熄灭,多臂机处于最大开口位置,第二发光二极管LED2点亮,此时系统将传感器检测模块2测得的连杆位置信号与多臂控制器输入的纹版信号进行逻辑对比。
请参阅图5,所述的电磁铁驱动电路包括第四光耦TL4、驱动芯片U2、第三插头J3、第四插头J4、第十三电阻R13、第十四电阻R14、第十五电阻R15、第十六电阻R16以及第二稳压二极管ZD2,所述的第四光耦TL4采用TLP521-4,所述的驱动芯片U2采用ULN2803,所述的第三插头J3(图12上的122)及第四插头J4(图12上的123)为DB37插头,设置在电子多臂错花报警模块1的后面板12上。所述的C1、C2信号通过第四插头J4接入,再通过第三插头J3输送给电子多臂控制器。第四光耦TL4的4脚连接第三插头J3的1脚,第四光耦TL4的14脚连接第十四电阻R14的一端,并共同连接至所述的CPLD逻辑电路,第四光耦TL4的15脚连接第十五电阻R15的一端,并共同连接驱动芯片U2的1脚,驱动芯片U2的18脚连接第四插头J4的1脚,第四光耦TL4的16脚连接第十六电阻R16的一端。上述构成了一路电磁铁驱动电路,而在实际应用时,由十个第四光耦TL4、三个驱动芯片U2构成二十路,可同时进行二十路电子多臂的检测,适应不同片数多臂机的使用要求。所述的纹版信号通过第三插头J3从电子多臂控制器输入,由光耦隔离后分成两路,一路信号通过驱动芯片U2由第四插头J4输送给多臂电磁铁,带动多臂机构动作;另一路输送给CPLD芯片U1的IO引脚(83脚)上,此信号与传感器检测模块2测得的连杆位置信号通过CPLD芯片U1进行逻辑处理与运算,用于判定此多臂运行是否出错。
请参阅图6,所述的传感器信号输入电路在该实施例中同样设有二十路,共同通过一第一插座J5接入传感器信号,所述的第一插座J5(图12上的124)为DC34牛角插座,设置于电子多臂错花报警模块1的后面板12上。现以一路为例,包括第三稳压二极管ZD3、第十七电阻R17、第十八电阻R18、第十九电阻R19、第五电容C5以及第五光耦TL5,所述的第五光耦TL5采用TLP281-4。传感器信号接入后,通过光耦隔离再输送到CPLD芯片U1的1脚上。
请参阅图7,所述的报警停车继电器信号输出电路包括继电器RLY1、第四二极管D4、第五发光二极管LED5、第二十电阻R20、第二十一电阻R21、第二十二电阻R22以及三极管Q1,所述的第二十一电阻R21的一端连接所述的CPLD芯片U1的26脚。三极管Q1采用S8050三极管,用作信号放大器,驱动继电器RLY1动作。当提综出错时,CPLD芯片U1输出一个低电平信号,通过三极管Q1放大,三极管Q1的集电极连接到继电器RLY1的线圈上,使继电器RLY1线圈通电,继电器触点动作,同时第五发光二极管LED5被点亮,第五发光二极管LED5为连锁报警指示灯。继电器触点信号通过一个四脚的第二插座J6输送给织机,织机得到此停车信号时可及时停车。所述的第二插座J6(图12上的125)位于电子多臂错花报警模块1的后面板12上。所述的第五发光二极管LED5(图11上的116)位于电子多臂错花报警模块1的前面板11上。
请参阅图8,本发明还包括报警指示灯电路,所述的报警指示灯电路包括一路多起指示灯、一路少起指示灯及多路出错报警指示灯,每个出错报警指示灯对应一片多臂提综连杆33。在本实施例中,所述的出错报警指示灯有二十路,图上示意了两路,分别为第八发光二极管LED8和第九发光二极管LED9,此外,第十发光二极管LED10为多起指示灯,第十一发光二极管LED11为少起指示灯。各个指示灯分别通过一电阻连接至CPLD芯片U1的IO引脚上。当提综动作出错时CPLD芯片U1输出低电平信号,对应报警指示灯被点亮,同时多起报警指示灯或者少起报警指示灯的其中一个被点亮,示意此路提综出错的原因是多起了或者是少起了。所述的出错报警指示灯(图11上的117)、多起报警指示灯(图11上的118)和少起报警指示灯(图11上的119)设置于电子多臂错花报警模块1的前面板11上。
请参阅图9,所述的传感器检测模块2包括第六发光二极管LED6、第二十三电阻R23、第二十四电阻R24以及霍尔传感器H1(图13上的21),霍尔传感器H1采用A3144单极开关型,只感应南极磁场,输出方波,其与磁钢配合,用于检测多臂提综连杆信号,霍尔传感器H1安装在电子多臂机3的连杆槽钢32内,并位于多臂提综连杆33的上方,所述的磁钢4通过磁性吸附于多臂提综连杆33的上方,并对准霍尔传感器H1的位置,磁钢4的南极朝上。当多臂带动多臂提综连杆33运动时,磁钢4靠近霍尔传感器H1,霍尔传感器H1产生霍尔效应,输出一个低电平信号;当远离霍尔传感器H1时,则输出一个高电平信号。所述的磁钢4与多臂提综连杆33用胶水粘住,防止在织造运动过程中磁钢4的位置发生移动,使检测产生误差。所述的传感器检测模块2上设置了两个DC34的牛角插座,分别为第三插座J7(图13上的22)和第四插座J8(图13上的23),通过数据线连接到电子多臂错花报警模块1上传感器信号输入电路的第一插座J5上,其特点是当右边第一个霍尔传感器H1作为测量第一片多臂提综连杆33时,则将数据线插在第四插座J8上,当左边第一个霍尔传感器H1作为测量的第一片多臂提综连杆33时,则将数据线插在第三插座J7上,这样可适应左右手电子多臂机的检测需要。所述的霍尔传感器H1的间距与多臂提综连杆33的间距相同,由此来保证测量的准确性。
请参阅图10,本发明还包括电源电路,包括第六电容C6、第七电容C7、第八电容C8、第九电容C9、第十电容C10、第十一电容C11、第十二电容C12、第三十电阻R30、第三十一电阻R31、第三十二电阻R32、第五二极管D5、第十二发光二极管LED12、第十三发光二极管LED13、第十四发光二极管LED14、第一电源芯片U3及第二电源芯片U4,所述的第一电源芯片U3采用LM2575T-5.0,所述的第二电源芯片U4采用AS1117-3.3。所述的DC24V电源采用多臂控制器的DC24V电源,然后通过第一电源芯片U3产生DC5V的电压,DC5V的电压通过第二电源芯片U4产生DC3.3V的电压,此电压为CPLD系统的供电电压。所述的电源电路通过第三插头J3向电子多臂错花报警模块1供电,再通过第一插座J5向传感器检测模块2供电。打开电子多臂控制器的电源时,即电子多臂错花报警模块1和传感器检测模块2同时通电,电子多臂错花报警模块1的电源指示灯,即第十四发光二极管LED14(图11上的110)被点亮,传感器检测模块2上的电源指示灯,即第七发光二极管LED7(图13上的24)被点亮。所述的电源指示灯位于电子多臂错花报警模块1的前面板11上。采用多臂控制器的电源,使得多臂出错报警装置无需再安装一个电源装置,节省成本并使安装更简单。另外在电子多臂错花报警模块1的后面板12上还设置有外接电源接口126,方便模块的检修和调试。
- 一种电子多臂错花自停报警装置
- 一种电子多臂错花自停报警装置