一种滚边工作站
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及零件加工的技术领域,特别是涉及一种滚边工作站。
背景技术
汽车部件中的车门及发动机舱盖加工步骤中必不可缺少的是滚边工艺,它是利用滚边工具中的滚轮使外板进行折弯、压紧,最终使外板与内板紧紧贴合在一起(又称包边)。
目前车门和发动机舱盖的包边通常是针对某一型号的单款零部件以专机的形式进行包边,如对某款车门进行包边时,将车门的内外板置于胎膜总成上,并采用定位销将内、外板简单定位后,使用滚边工具在车门四周同时包边。
现有技术中的滚边工作站中存在着在地面布置胎模存放数量少、导致库体占地面积大,成本高的技术问题。
发明内容
为了解决上述问题,本发明的目的是提供一种滚边工作站,用于解决现有技术中的滚边工作站中存在着的在地面布置胎模存放数量少、导致库体占地面积大,成本高的技术问题。
为解决上述技术问题,本发明的实施例采用了如下技术方案:
本发明的实施例提供了一种滚边工作站,滚边工作站包括:
第一层,所述第一层包括:
第一轨道;
下胎膜库存区,多个所述下胎膜库存区位于所述第一轨道的端部位置上;
滚边工作位,所述滚边工作位位于所述第一导轨侧,所述滚边工作位具有滚边机器人,其中,所述滚边机器人用于对位于第一导轨上的胎膜进行滚边加工;
第二层,所述第二层包括:
多个上胎膜库存区;
第二轨道,所述第二轨道连接各所述上胎膜库存区;
升降装置,所述升降装置设置于所述第一轨道上,且上升时,可将其上的胎膜从第一轨道运输至第二轨道上。
进一步地,所述滚边工作站还包括:
控制器,与所述第一轨道和第二轨道电连接,用于控制胎膜所述第一轨道和所述第二轨道上移动以及控制所述升降装置控制对所述胎膜进行升降操作。
进一步,所述滚边工作站还包括:
胎膜切换装置,所述胎膜切换车的前端具有第一定位部;
其中,所述第一轨道上具有第二定位部,所述第二定位部位于具有下胎膜库存区的端部上,所述第一定位部与所述第二定位部相互匹配。
进一步地,所述胎膜切换装置包括:
机架,所述机架的底部设置有若干个万向轮,所述第一定位部设置于所述机架的前端,所述机架的顶部可供所述胎膜放置。
进一步地,所述第一轨道包括:
第一横杆,其中,两个所述下胎膜库存区位于所述第一横轨的两端;
第二横轨,其中,另外两个所述下胎膜库存区位于所述第二横轨的两端;
第一纵轨,所述第一纵轨的第一端连接所述第一横轨的第一侧,所述第一纵轨的第二端连接所述第二横轨的第一侧;
第二纵轨,所述第一纵轨的第一端连接所述第一横轨的第一侧,所述第一纵轨的第二端连接所述第二横轨的第一侧;
其中,升降装置为四个,分别位于所述第一纵轨和所述第一横轨连接处、所述第一纵轨和所述第二横轨连接处、所述第二纵轨和所述第一横轨连接处以及所述第二纵轨和所述第二横轨连接处。
进一步地,两个所述下胎膜库存区位于所述第一纵轨的两端;
两个所述下胎膜库存区位于所述第二纵轨的两端;
其中,第一纵轨的两端的、第二纵轨的两端的、第二横轨的两端的,第一横轨的两端的所述下胎膜库存区为独立的所述下胎膜库存区。
进一步地,所述滚边工作区包括:
第一滚边工作区,位于所述第一横轨上,且位于所述第一纵轨和所述第二纵轨之间;
第二滚边工作区,位于所述第二横轨上,且位于所述第一纵轨和所述第二纵轨之间。
进一步地,第一所述滚边工作区上的滚边机器人为三个,两个位于所述第一横轨的第一侧,一个位于所述第一横轨的第二侧。
进一步地,所述升降装置包括:
升降机;
连接轨,所述连接轨设置于所述升降机的顶部;
所述第一横轨具有第一槽,所述第一槽位于所述升降装置的位置处,所述第二轨道上具有与所述第一槽位置相对应的第二槽;
随升降机下降至所述连接轨置于所述第一槽内时,所述连接轨与所述第一横轨相匹配;
随升降机上升至所述连接轨置于所述第二槽内时,所述连接轨与所述第二轨道相匹配。
进一步地,所述第二轨道包括:
第三横轨,其中,两个所述上胎膜库存区位于所述第三横轨的两端,所述第二槽位于所述所述第三横杆上;
第四横轨,其中,两个所述上胎膜库存区位于所述第四横轨的两端;
第三纵轨,所述第三纵轨的第一端连接所述第三横轨的第一侧,所述第三纵轨的第二端连接所述第四横轨的第一侧;
第四纵轨,所述第四纵轨的第一端连接所述第三横轨的第一侧,所述第四纵轨的第二端连接所述第四横轨的第一侧;
所述升降装置上升时,所述连接轨位于所述第二槽时,所述连接轨与所述第三横轨相匹配。
相比于现有技术,本发明的实施例的有益效果在于:
本发明实施例提供的一种滚边工作站,滚边工作站包括:第一层,所述第一层包括:第一轨道;下胎膜库存区,多个所述下胎膜库存区位于所述第一轨道的端部位置上;滚边工作位,所述滚边工作位位于所述第一导轨侧,所述滚边工作位具有滚边机器人,其中,所述滚边机器人用于对位于第一导轨上的胎膜进行滚边加工;第二层,所述第二层包括:多个上胎膜库存区;第二轨道,所述第二轨道连接各所述上胎膜库存区;升降装置,所述升降装置设置于所述第一轨道上,且上升时,可将其上的胎膜从第一轨道运输至第二轨道上。有效地解决了现有技术中的滚边工作站中存在着的在地面布置胎模存放数量少、导致库体占地面积大,成本高的技术问题。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
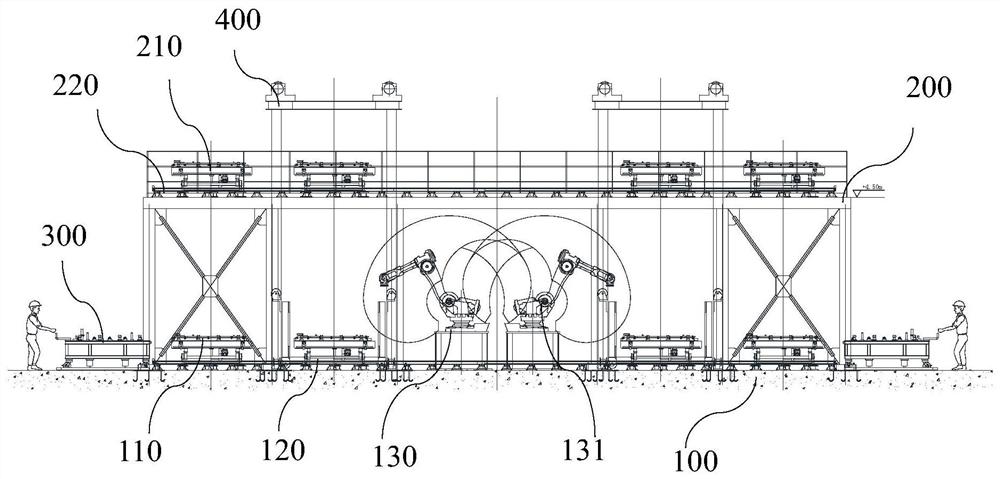
图1是本发明实施例提供的一种滚边工作站的结构示意图;
图2是本发明实施例提供的一种滚边工作站第一层的结构示意图;
图3是本发明实施例提供的一种滚边工作站第二层的结构示意图。
其中:
100、第一层;110、下胎膜库存区;120、第一轨道;121、第一横轨;122、第二横轨;123、第一纵轨;124、第二纵轨;130、滚边工作位;131、滚边机器人;200、第二层;210、上胎膜库存区;220、第二轨道;221、第三横轨;222、第四横轨;223、第三纵轨;224、第四纵轨;300、胎膜切换装置;400、升降装置。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本申请实施例的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请实施例的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本申请实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可更换连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请实施例中的具体含义。
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
如图1所示,图1为本发明实施例提供的一种滚边工作站,其特征在于,滚边工作站包括:
第一层100,所述第一层100包括:
第一轨道120;
下胎膜库存区110,多个所述下胎膜库存区110位于所述第一轨道120的端部位置上;
滚边工作位130,所述滚边工作位130位于所述第一导轨侧,所述滚边工作位130具有滚边机器人131,其中,所述滚边机器人131用于对位于第一导轨上的胎膜进行滚边加工;
第二层200,所述第二层200包括:
多个上胎膜库存区210;
第二轨道220,所述第二轨道220连接各所述上胎膜库存区210;
升降装置400,所述升降装置400设置于所述第一轨道120上,且上升时,可将其上的胎膜从第一轨道120运输至第二轨道220上。
本实施例的所述滚边工作站,分为两层,能够在第一层100进行滚边加工以及加工后的下胎膜库存区110进行存放技工后的胎膜;在第二层200上上胎膜库存区210能够直接进行胎膜的存放。
其中,所述上胎膜库存区210和所述下胎膜库存区110均为固定设置于所述第一轨道120或者第二轨道220上方的支架,可以通过机械手直接切换,当然所述上胎膜库存区210和所述下胎膜库存区110也可以直接为第一轨道120和第二轨道220的预置位置,使得直接在所述第一轨道120和第二轨道220上划定预定区域为然所述上胎膜库存区210和所述下胎膜库存区110;或者将与第一轨道120的端部连接的闲置区域设定为下胎膜库存区110,将与第二轨道220的端部连接的闲置区域作为上胎膜库存区210。
其中,所述滚边工作站还包括:
控制器,与所述第一轨道120和第二轨道220电连接,用于控制胎膜所述第一轨道120和所述第二轨道220上移动以及控制所述升降装置400控制对所述胎膜进行升降操作。
通过控制器能够对所述滚边工作站进行自动控制自动加工。
所述滚边工作站还包括:
胎膜切换装置300,所述胎膜切换车的前端具有第一定位部;
其中,所述第一轨道120上具有第二定位部,所述第二定位部位于具有下胎膜库存区110的端部上,所述第一定位部与所述第二定位部相互匹配。
所述胎膜切换装置300是为了能够使得未加工的胎膜进入到所述第一轨道120上,已经加工的胎膜能够在所述下胎膜库存区110里面运输出来,以使得加工能够持续进行,所述胎膜切换装置300与所述第一轨道120上的下胎膜库存区110之间进行出入库。
所述胎膜切换装置300包括:
机架,所述机架的底部设置有若干个万向轮,所述第一定位部设置于所述机架的前端,所述机架的顶部可供所述胎膜放置。
通过若干个万向轮,使得所述胎膜切换装置300能够便于移动。其中个,所述胎膜切换装置300可以为胎膜小车,通过在所述胎膜小车的前端设第一定位部,所述第一定位部可以为位于所述机架前端的凸起部,所述第二定位部可以为凹槽,通过凸起部插入所述凹槽中进行定位,普通的运输小车定位的方法均可适用。
其中,所述第一轨道120包括:
第一横杆,其中,两个所述下胎膜库存区110位于所述第一横轨121的两端;
第二横轨122,其中,另外两个所述下胎膜库存区110位于所述第二横轨122的两端;
第一纵轨123,所述第一纵轨123的第一端连接所述第一横轨121的第一侧,所述第一纵轨123的第二端连接所述第二横轨122的第一侧;
第二纵轨124,所述第二纵轨124的第一端连接所述第一横轨121的第一侧,所述第二纵轨124的第二端连接所述第二横轨122的第一侧;
其中,升降装置400为四个,分别位于所述第一纵轨123和所述第一横轨121连接处、所述第一纵轨123和所述第二横轨122连接处、所述第二纵轨124和所述第一横轨121连接处以及所述第二纵轨124和所述第二横轨122连接处
该方式可以在一层设置四个下胎膜库存区110进行存储加工,能够有效地利用场地空间。
两个所述下胎膜库存区110位于所述第一纵轨123的两端;
两个所述下胎膜库存区110位于所述第二纵轨124的两端;
其中,第一纵轨123的两端的、第二纵轨124的两端的、第二横轨122的两端的,第一横轨121的两端的所述下胎膜库存区110为独立的所述下胎膜库存区110。
通过该方式设置,能够更加有效地利用场地空间,使得一层能够容纳八个下胎膜库存,以便进行存放加工。
所述滚边工作区包括:
第一滚边工作区,位于所述第一横轨121上,且位于所述第一纵轨123和所述第二纵轨124之间;
第二滚边工作区,位于所述第二横轨122上,且位于所述第一纵轨123和所述第二纵轨124之间。
其中,设置第一滚边工作区和第二滚边工作区能够有效地利用场地,进行滚边加工。
而且能够同时对第一层100的第一横轨121、第二横轨122、第一纵轨123和第二纵轨124上的过来的胎膜进行加工,高效快捷。
其中,第一所述滚边工作区上的滚边机器人131为三个,两个位于所述第一横轨121的第一侧,一个位于所述第一横轨121的第二侧。
所述第二滚边工作区,同理,也为三个滚边机器人131,分别对同一个运输过来的胎膜进行加工。
能够实现快速多方位的双轨道进行加工,有效的提升了加工效率以及场地利用率。
所述升降装置400包括:
升降机;
连接轨,所述连接轨设置于所述升降机的顶部;
所述第一横轨121具有第一槽,所述第一槽位于所述升降装置400的位置处,所述第二轨道220上具有与所述第一槽位置相对应的第二槽;
随升降机下降至所述连接轨置于所述第一槽内时,所述连接轨与所述第一横轨121相匹配;
随升降机上升至所述连接轨置于所述第二槽内时,所述连接轨与所述第二轨道220相匹配。
具体地,所述第二轨道220包括:
第三横轨221,其中,两个所述上胎膜库存区210位于所述第三横轨221的两端,所述第二槽位于所述所述第三横杆上;
第四横轨222,其中,两个所述上胎膜库存区210位于所述第四横轨222的两端;
第三纵轨223,所述第三纵轨223的第一端连接所述第三横轨的第一侧,所述第三纵轨223的第二端连接所述第四横轨的第一侧;
第四纵轨224,所述第四纵轨224的第一端连接所述第三横轨的第一侧,所述第四纵轨224的第二端连接所述第四横轨的第一侧;
所述升降装置400上升时,所述连接轨位于所述第二槽时,所述连接轨与所述第三横轨221相匹配。
其中,其余三个升降装置400同理,均包括升降机和连接轨,能够实现相同的作用,以及工作方式相同,在此不再赘述。
本实施例的所述滚边工作站,采用二层、地面+线外切换的方式实现在线存放9款车型的滚边胎模,在生产节拍内切换完成,减少场地占用面积,同时该库体方案根据生产车型数量,分步投资下、线外切换和上层。其占地面积小、投资灵活性高、在线滚边胎模库存数量多。
所述升降机为四柱升降机。
图1中A、B分别代表发动机盖、后背门滚边胎模库存区,下胎模库体存放位A1-A4、B1-B4分别存放四款不同车型机盖和背门胎模。滚边作业区为机盖、背门机器人即为滚边机器人131滚边作业位。
A位存放机盖滚边胎模,胎模切换流程如下:
以A1为例:
胎模由存放位A1自动运行至滚边作业位;
滚边机器人131Ra
滚边机器人131Ra
胎模由滚边作业位自动运行至存放位A1。
B位存放背门滚边胎模,工艺流程如下:
以B1为例:
胎模由存放位B1自动运行至滚边作业位
滚边机器人131Rb
滚边机器人131Rb
胎模由滚边作业位自动运行至存放位B1。
A2-A4,B2-B4存放位胎模切换流程同上;在此不再赘述。
图1中A、B分别代表发动机盖、后背门滚边胎模库存区,地面一层胎模库体存放位A5-A9、B5-B9分别存放四款不同车型机盖和背门胎模。
A5位存放机盖滚边胎模,胎模在线切换流程如下:
胎模存放位A5自动运行由第一层100至第二层200升降机(四柱)处
胎模通过升降机由第二层200将至第一层100;
胎模由地面一层升降机(四柱)位置自动运行至滚边作业位,批量生产;
机器人Ra
机器人Ra
胎模由滚边作业位自动运行至地面一层升降机(四柱)位置;
胎模通过升降机(四柱)由第一层100将至第二层200;
胎模由升降机(四柱)处自动运行至胎模存放位A5。
胎模存放位B5自动运行至第二层200升降机(四柱)处
胎模通过升降机(四柱)由第二层200将至第一层
胎模由第一层升降机(四柱)位置自动运行至滚边作业位,批量生产
滚边机器人131Rb
滚边机器人131Rb
胎模由滚边作业位自动运行至第一层100升降机(四柱)位置;
胎模通过升降机(四柱)由第一层100将至第二层200;
胎模由升降机(四柱)处自动运行至胎模存放位B5;
以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种滚边工作站
- 滚边工作站