基于电控空气悬架的车辆ACC系统姿态控制方法及系统
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及一种基于电控空气悬架的车辆ACC系统姿态控制方法及系统,属于汽车智能辅助驾驶技术领域。
背景技术
随着先进驾驶辅助系统的不断完善与发展,ACC系统在车辆自动、半自动驾驶领域得到广泛应用。其工作原理为:在跟车行驶过程中ACC系统会根据雷达设备采集到的车间相关信息,如车距和相对速度,发出加速及制动信号,控制车辆的驱动、制动系统,进而实现车辆的自适应变速运行。但由于加速、制动过程中车辆纵向载荷的转移,车辆会失衡,产生“抬头”和“点头”现象,会对车上驾乘人员的舒适性造成一定影响。导致用户对ACC系统的信任度降低,甚至弃用智能辅助驾驶系统。
发明内容
鉴于此,本发明的目的是提供一种基于电控空气悬架的车辆ACC系统姿态控制方法及系统,可以克服现有技术的不足。
本发明的目的是通过以下技术方案实现的:
一种基于电控空气悬架的车辆ACC系统姿态控制方法,其包括以下步骤:
s1、根据车辆自适应巡航工况,采用滑模控制算法获得实时的车辆期望附加俯仰力矩值;
s2、将所需附加俯仰力矩值进行分配,转化为车辆前后轴悬架上的附加力;
s3、采用逻辑控制方法对电控空气悬架系统进行调节,通过其产生的抗俯仰力矩来抵抗使车身姿态失衡的附加俯仰力。
前述步骤s1中,工作触发条件为自适应巡航工况急加速和急减速,通过车辆ACC系统采集相应的加速度和车身俯仰角度,判断车辆姿态情况;
以俯仰角为控制变量,俯仰角误差为控制反馈信号输送到滑模控制器中;滑模控制算法根据实时测量状态信息产生抗俯仰力矩来实现最小车身俯仰角的目标。
前述步骤s2中,对力矩在前后轴的附加垂向力进行分配,并通过控制前后轴电磁阀PWM 波信号来实现附加俯仰力矩的跟随作用。
前述步骤s2中,将期望抗俯仰力矩值经力分配器分配后,成为电控空气弹簧所需产生的主动力信号;经过空气充放气气体热力学过程以及结合电控空气弹簧实时结构参数,主动力信号变为了所需充入或放出空气弹簧的空气质量信号;空气质量信号经过与高速开关电磁阀所能提供的当下空气流量进行比较分析,将空气质量转化为占空比信号;占空比数字信号输入到电磁阀模型后产生空气质量流量信号;质量流量信号最终进入到空气弹簧气囊内;由于气囊内气体压力信号的变化,引起空气弹簧力信号最终发生变化。
前述步骤s3中,根据车辆轴距参数,将力矩转化为前后轴悬架上的附加力,附加力可通过空气弹簧重放气进行实现。
前述步骤s3中,急加速时,前轴空气弹簧放气,后轴空气弹簧充气;急减速时,前轴空气弹簧充气,后轴空气弹簧放气;空气弹簧的充气和放气过程将改变气囊内压力,进而实现空气弹簧主动力调节,最终使悬架刚度变化,合成抵抗车身姿态失衡的抗俯仰力矩。
一种基于电控空气悬架的车辆ACC系统姿态控制系统,包括ACC车辆,及与ACC车辆ACC系统电连接的滑模控制器和力分配器;在ACC车辆的前后轮轴悬架上均设有电控空气悬架,且电控空气悬架与力分配器相连;
所述ACC系统用于采集ACC车辆急加速或急减速工况时的加速度和路面激励的作用下产生俯仰角,并将反馈信号输送到滑模控制器中;
所述滑模控制器采用滑模控制算法得到期望抗俯仰力矩值;
所述力分配器用于将期望抗俯仰力矩值分配成为电控空气弹簧所需产生的主动力信号,使电控空气悬架产生抗俯仰力矩来抵抗使车身姿态失衡的附加俯仰力。
前述电控空气悬架包括带液压减振器的空气弹簧,所述空气弹簧通过供气管系和供气装置相连,在供气管系上设有调节空气弹簧供气量的控制系统。
前述控制系统包括电控单元及与之相连的高速开关电磁阀。
前述高速开关电磁阀为通过PWM波控制的开关电磁阀。
与现有技术比较,本发明公开的一种基于电控空气悬架的车辆ACC系统姿态控制方法及系统,其通过ACC系统采集巡航车辆加速或制动时车身产生俯、仰运动参数,采用滑模控制算法获得实时的车辆期望附加俯仰力矩值,并通过力分配器进行分配,最终通过电控空气悬架系统充放气实现悬架期望附加垂向力,进而合成抗俯仰力矩,抑制车身姿态失衡,有效改善巡航工况下车身姿态俯仰角变化,减少车身垂向和俯仰加速度,提升车辆行驶平顺性。
本发明的有益效果是:
(1)本发明提供一种基于电控空气悬架的车辆ACC系统姿态控制方法,能运用简单可行的原理及策略,可实施性好,并且可有效保障车辆巡航状况下抑制车身姿态失衡,提升驾乘舒适性;
(2)采用滑模控制器的滑模控制算法得到期望抗俯仰力矩值,通过力分配器将期望抗俯仰力矩值分配成为电控空气弹簧所需产生的主动力信号,来调节电控空气悬架的空气弹簧内部气体压力,实现悬架力的主动调节,改善车辆底盘力学特性响应;
(3)采用PWM波控制高速电磁阀,可实时进行空气弹簧充放气,通过空气弹簧的可变刚度特性来实现悬架系统力的变化,有效地改善车辆俯仰姿态,车姿加速度均方值优化均达到10%以上;
(4)可根据不同车型参数更改力分配器,可将抑制俯仰的力矩值在前后轴悬架进行实时分配,适用范围广,推广性高。
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
图1为本发明工作流程示意图。
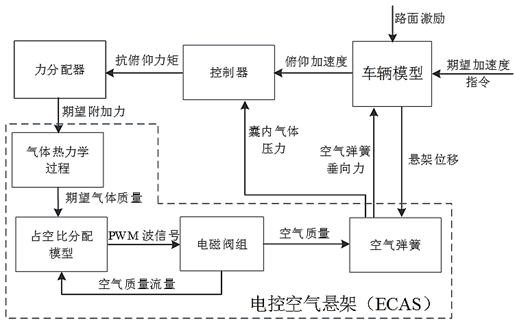
图2为本发明的工作原理示意图。
图3为空气悬架七自由度力分析示意图。
图4为本发明的结构示意图。
图5为电控空气悬架的结构示意图。
图6为电控空气弹簧的调控原理图。
图7为仿真分析中,ACC系统加速工况加速度分析图。
图8为仿真分析中,车身加速工况下垂向加速度的对比分析图。
图9为仿真分析中,车身加速工况下俯仰倾角加速度的对比分析图。
图10为仿真分析中,车身加速工况下俯仰角的对比分析图。
图11为仿真分析中,车身加速工况下前轴阀PWM波脉冲信号图。
图12为仿真分析中,ACC系统制动工况加速度分析图。
图13为仿真分析中,车身制动工况俯仰角的对比分析图。
图14为仿真分析中,车身制动工况俯仰角加速度的对比分析图。
图15为仿真分析中,车身制动工况垂向加速度的对比分析图。
图16为仿真分析中,车身制动工况下前轴阀PWM波脉冲信号图。
具体实施方式
以下将参照附图,对本发明的优选实施例进行详细的描述。应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
如图1-图2所示,一种基于电控空气悬架的车辆ACC系统姿态控制方法及系统,其包括以下步骤:
s1、根据车辆自适应巡航工况,采用滑模控制算法获得实时的车辆期望附加俯仰力矩值;
s2、将所需附加俯仰力矩值进行分配,转化为车辆前后轴悬架上的附加力;
s3、采用逻辑控制方法对电控空气悬架系统进行调节,通过其产生的抗俯仰力矩来抵抗使车身姿态失衡的附加俯仰力。
步骤s1中,
工作触发条件为自适应巡航工况急加速和急减速,通过车辆ACC系统采集相应的加速度和车身俯仰角度,判断车辆姿态情况;
以俯仰角为控制变量,俯仰角误差为控制反馈信号输送到滑模控制器中;滑模控制算法根据实时测量状态信息产生抗俯仰力矩来实现最小车身俯仰角的目标;
具体地,所述滑模控制算法如下,
见图3,加入电控空气悬架系统建立了整车七自由度动力学模型,包括四个簧下质量的垂向运动,以及簧载车身的垂向、侧向以及俯仰运动,由牛顿第二定理可得车身簧载质量的运动为:
式中,z
空气弹簧的垂向作用力F
P
根据公式(1)的车辆模型,以电控空气悬架系统作为车身姿态的执行设备。系统输入为附加俯仰力矩M
则
式中,θ
f=-[F
同时选择滑模的比例趋近率作为趋近条件,即
s=-ηs-ksgn(s) (4)
联立式(3)和(4)可得姿态控制的期望附加俯仰力矩为:
为消除抖振,利用饱和函数替换原来的符号函数sat()替换原有的符号函数
式中,系数b表示滑模面的边界厚度。
步骤s2中,对力矩在前后轴的附加垂向力进行分配,并通过控制前后轴电磁阀PWM波信号来实现附加俯仰力矩的跟随作用。
将期望抗俯仰力矩值经力分配器分配后,成为电控空气弹簧所需产生的主动力信号;经过空气充放气气体热力学过程以及结合电控空气弹簧实时结构参数,主动力信号变为了所需充入或放出空气弹簧的空气质量信号;空气质量信号经过与于高速开关电磁阀的所能提供的当下空气流量进行比较分析,将空气质量转化为占空比信号;占空比数字信号输入到电磁阀模型后产生空气质量流量信号;质量流量信号最终进入到空气弹簧气囊内;由于气囊内气体压力信号的变化,引起空气弹簧力信号最终发生变化,通过四个空气悬架主动力的合成进而实时期望抗俯仰力矩信号的跟随响应。
具体地,根据前后轴载荷分配可得前后轴悬架附加力为:
式中,l为车辆轴距,P
由充放气热力学过程可得所需理想的冲入或放出空气质量为:
式中,R为理想气体常数,T表示绝对温度,
P
因此,通过占空比信号在一个周期内的开关信号控制电磁阀的动作,最终流入空气弹簧的有效空气质量为:
m
步骤s3中,
根据车辆轴距参数,将力矩转化为前后轴悬架上的附加力,附加力可通过空气弹簧重放气进行实现,急加速时,前轴空气弹簧放气,后轴空气弹簧充气;急减速时,前轴空气弹簧充气,后轴空气弹簧放气;空气弹簧的充气和放气过程将改变气囊内压力,进而实现空气弹簧主动力调节,最终使悬架刚度变化,合成抵抗车身姿态失衡的抗俯仰力矩。
见图4-图6,
一种基于电控空气悬架的车辆ACC系统姿态控制系统,包括ACC车辆1,及与ACC车辆ACC系统电连接的滑模控制器2和力分配器3;在ACC车辆1的前后轮轴悬架上均设有电控空气悬架4,且电控空气悬架4与力分配器3相连;
所述ACC系统用于采集ACC车辆1急加速或急减速工况时的加速度和路面激励的作用下产生俯仰角,并将反馈信号输送到滑模控制器2中;
所述滑模控制器2采用滑模控制算法得到期望抗俯仰力矩值;
所述力分配器3用于将期望抗俯仰力矩值分配成为电控空气弹簧所需产生的主动力信号,使电控空气悬架4产生抗俯仰力矩来抵抗使车身姿态失衡的附加俯仰力。
所述电控空气悬4架包括带液压减振器402的空气弹簧401,所述空气弹簧401通过供气管系和供气装置403相连,在供气管系上设有调节空气弹簧401供气量的控制系统404。
所述供气装置403包括储气罐及与储气罐相连的压缩机。
所述控制系统404包括电控单元4041及与之相连的高速开关电磁阀4042。
所述高速开关电磁阀4042为通过PWM波控制的开关电磁阀。
所述电控单元4041为控制器。
电控空气悬架的工作原理:
1)充气过程分析:当需要增加车辆悬架刚度系数抵抗车身姿态变化时,电控单元将高压气体通过高速开关电磁阀的控制流入空气弹簧囊内,此时压缩机开始向储气罐供应高压空气,使压缩空气通过高速开关电磁阀从储气罐流到空气弹簧。针对车辆的前后轮轴悬架,每个电控空气悬架的空气弹簧通过其对应的高速开关电磁阀单独调节进入对应空气弹簧的气流,且各空气弹簧之间不会相互影响。
2)放气过程分析:当需要降低车辆悬架刚度系数减少主动力时,空气弹簧囊内的压缩气体在高速开关电磁阀PWM波的控制作用下通过管路排放到大气中,使得空气弹簧囊内气体压力减小,悬架刚度下降。
见图7-图16,基于上述方法的仿真分析:
首先,对电控空气悬架系统进行非线性机理建模,并对系统进行如下假设:
1)空气压缩机和储气罐可简化为两个压力相同的高压气压源,大气环境压力简化为一个低压气压源,且高低气压源在充放气姿态调节过程中近似保持不变;
2)系统中的气体为理想气体,其动能和势能可忽略不计;
3)系统中所用的开关电磁阀的物理特性均相同,都被近似为薄壁小孔;
4)空气弹簧和减振器阻尼系数都近似为常数。
为了验证电控空气悬架模型及其控制算法的有效性,模拟车辆在ACC工况下遇到前车急加或急减速行驶,本车为了保持良好的跟车性以同等加速度跟随行驶工况下进行仿真。车辆及电控空气悬架仿真参数见表1。
表1车辆主要参数
选取ACC车辆在B级路面以60km/h的速度跟车巡航行驶,为保持良好的跟车性能,假设ACC车辆与前车保持相同加速度。在2s时前车突然急加速行驶,最大加速度达到3m/s
如图7所示,当前方人工驾驶车辆因道路宽阔,行驶条件好时出现急加速。
由图8和图9可知,与被动空气悬架相比,电控空气悬架通过电磁阀充放气适时改变空气弹簧的内部压力,进而产生附加垂向力,悬架系统合成附加俯仰力矩,抑制了车身的垂向振动,改善了车辆的平顺性。
由图10可知,电控空气悬架的俯仰角峰值和振动范围均有下降,车身姿态变化更加平稳。
为了更直观对比空气悬架和电控空气悬架之间的差异,如表2所示,列出了各指标的加速度均方值,
表2加速工况车身姿态指标加速度均方值
由表2的结果对比分析可知,加了实时车身俯仰控制和电磁阀逻辑控制的电控空气悬架车辆巡航加速工况时各项性能指标均优于被动空气悬架车辆,且垂向加速度均方值和俯仰角加速度均方值分别降低了20.85%和16.89%。因此所设计的电控空气悬架策略能改善车身俯仰姿态,提升车辆的平顺性能。
如图11所示为前轴空气悬架充放气电磁阀PWM波脉冲信号图。选用电磁阀的切换频率为50Hz,急加速时对前轴电磁阀采放气来保持车身俯仰姿态,1表示电磁阀充气,-1表示电磁阀放气。同时,由于着路面随机不平度激励电磁阀也伴随着间断充气控制信号。
如图12所示,从远处接近前车,并最终紧急制动停车。ACC车辆以80km/h的初始速度在B级路面巡航行驶,先加速从远处接近前车,之后紧急制动至减速度为-5.7m/s
由图13所示,紧急制动工况下,电控空气悬架由于系统时滞和进气量较少,初段作用效果不是很明显,但之后系统能保证车身姿态俯仰角在期望值0附近波动,且幅值较空气悬架有所降低。由图14和15可知,紧急制动时车身的垂向和俯仰方向的振动均得到有效抑制,显著改善了车辆运行时的平顺性和舒适性。
为了更直观对比空气悬架和电控空气悬架之间的差异,如表3所示,列出了各指标制动工况下的加速度均方值,
由表3进一步分析知,垂向和俯仰方向的加速度均方值分别降低了14.89%和17.60%。
如图16所示为车辆前轴悬架PWM波控制信号,紧急制动时,通过前轴充气,后轴放气来实现滑模控制所需附加俯仰力矩的跟随作用。
本发明应用滑模控制理论设计滑模控制算法获得实时的车辆所需附加俯仰力矩,通过电磁阀充放气实现期望附加俯仰力矩的跟随作用。仿真结果表明,提出的基于电控空气悬架的车辆在ACC系统巡航急加速和制动工况下均能够有效地改善车辆俯仰姿态,车姿加速度均方值优化均达到10%以上。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式保密的限制,任何未脱离本发明技术方案内容、依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 基于电控空气悬架的车辆ACC系统姿态控制方法及系统
- 一种用于车辆开发阶段的ACC系统用电控加减速系统