一种基于回转平动机构的平地机刮土工作装置
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及铲土运输机械领域的平地机,特别是一种基于回转平动机构的平地机刮土工作装置。
背景技术
平地机是一种用于大面积土地平整或整形,边坡填补或切削刮平,冬季破冰除雪作业的铲土运输机械,是道路工程、农业工程、水利工程、国防工程等基础建设中用于土方整形施工的专用机械。其中刮土工作装置是平地机最重要的工作装置,主要由前机架、摆架、牵引架、铲刀装置组成;为了满足土地平整或整形,刮土工作装置需要精确实现铲刀六自由度空间运动,即铲刀升降、铲刀倾斜、铲刀回转、铲刀侧移(铲刀相对于机架左、右侧伸)、刮刀直移(沿机械行驶方向)、铲刀切削角改变、铲刀随回转圈一起侧移(即牵引架引出),其中刮刀直移通过机械直线行驶实现,铲刀切削角改变则由人工或者液压缸实现。
虽然现有平地机从诞生到现在已有几十年历史,但其基本结构并未发生大的改变,因此也存在一些固有问题,例如,现有平地机通过摆架实现铲刀倾斜,难以实现精确的倾斜角度控制;牵引架分为A型结构和T型结构,但不论哪种结构,为了实现牵引架引出,牵引架与前机架之间均通过铰接球头连接,而球铰不仅成本高,而且可靠性差,为了实现铲刀回转,牵引架上安装有大型转盘,重量大、成本高;现有刮土工作装置采用并联空间机构,机构耦合度高,铲刀控制系统复杂,难以实现高精度运动控制;现有刮土工作装置采用并联空间机构虽然保证了刮刀灵活性,但运动空间小,特别是牵引架引出距离小,引出后铲刀升降高度小,限制了铲刀作业空间,铲刀升降过程无法实现平动等等。这是平地机技术发展几十年来未能解决的棘手问题,一定程度上制约了平整或整形施工技术的进一步提升。
发明内容
本发明的目的是提供一种基于回转平动机构的平地机刮土工作装置,克服现有平地机刮土工作装置机构耦合度高,高精度运动控制困难,铲刀灵活性差,运动空间小等问题,满足土地平整或整形作业的高精度、高灵活性、大工作空间要求。
一种基于回转平动机构的平地机刮土工作装置,包括机架、第一回转台、平动机构、第二回转台、铲刀机构,所述机架一端与前车架连接,另一端与后车架连接,所述第一回转台通过第一转动副安装在机架上,由第一驱动元件驱动,所述第一驱动元件为液压马达或电机,在其驱动作用下,第一回转台可相对机架转动,配合平动机构可实现铲刀机构引出,现有平地机依赖摆架实现铲刀随回转圈侧移(即牵引架引出)时,铲刀运动为复杂空间运动,而第一回转台配合平动机构不仅可实铲刀机构大距离引出,而且操纵控制简单,配合第二回转台,可以实现铲刀机构平动以及精确引出控制。另外,相比现有平地机牵引架通过球铰与机架连接的方式,该种基于回转平动机构的平地机刮土工作装置利用第一回转台与机架连接,大幅提升了结构刚度以及抗负载能力,提升了铲刀机构平整或整形时的稳定性。
所述平动机构为平面机构,包括纵梁、第一连杆、第二连杆、动平台,所述纵梁、第一连杆、第二连杆、动平台组成平面双连杆四杆机构,所述纵梁固定安装在第一回转台上,第一连杆一端通过第二转动副与纵梁连接,另一端通过第三转动副与动平台连接,所述第二连杆一端通过第四转动副与纵梁连接,另一端通过第五转动副与动平台连接;所述第二转动副与第三转动副之间的孔心距,它和第四转动副与第五转动副之间的孔心距相同,所述第四转动副与第二转动副之间的孔心距,它和第五转动副与第三转动副之间的孔心距相等,因此所述纵梁、第一连杆、第二连杆、动平台构成平行四边形结构;所述第二转动副与第四转动副之间的孔心连线和第一转动副的回转轴线平行,因此当平动机构运动时,第五转动副与第三转动副之间的孔心连线,它始终和第一转动副的回转轴线平行,即动平台始终相对第一回转台平动;所述第二连杆由第一直线驱动器驱动,所述第一直线驱动器一端通过第六转动副与第一回转台连接,另一端通过第七转动副与第二连杆连接,所述第一直线驱动器为液压缸或伺服电动缸。
在实际工程应用中,当该种新型平地机置于水平地面上,此时第一回转台回转轴线与地面垂直,当第一直线驱动器伸缩时,带动第二连杆绕第四转动副上下摆动,动平台在第一连杆配合下将相对地面以及第一回转台实现上下平动,在第一回转台、平动机构、第二回转台配合下,该种基于回转平动机构的平地机刮土工作装置可实现铲刀机构在升降、倾斜移动、侧移等动作的平动,相比现有平地机铲刀复杂的耦合运动控制,有效降低了铲刀控制难度,更好的满足施工要求;相比现有平地机刮土工作装置依赖复杂的耦合空间运动实现铲刀运动,采用平动机构的该种平地机刮土工作装置运动准确性、可控性、稳定性等动态性能更好,更能满足铲刀机构高质量的平整或整形施工技术要求。
所述第二回转台通过第八转动副与动平台连接,所述第二回转台由第二驱动元件驱动,在其驱动下,第二回转台相对动平台旋转,满足铲刀机构平整或整平作业需要,所述第八转动副的回转轴线与第一转动副的回转轴线平行,所述第二驱动元件为液压马达或电机。
所述铲刀机构包括支撑板、第一滑板、第二滑板、铲刀,所述支撑板通过第九转动副与第二回转台连接,所述第九转动副回转轴线与第八转动副的回转轴线垂直,所述支撑板由第三驱动元件驱动,所述第三驱动元件为液压马达或电机,在其驱动作用下,支撑板可相对第二回转台转动,进而实现铲刀机构倾斜,满足边坡平整及整形作业需要,相比现有平地机依赖复杂的耦合运动或手动调节铲刀倾斜角实现铲刀边坡作业,该种基于回转平动机构的平地机刮土工作装置不仅铲刀倾斜角度易控制,而且在第一回转台、平动机构、第二回转台的配合下,铲刀机构在边坡作业中可实现平动,使铲刀更好的满足边坡平整及整形需要;
所述第一滑板通过第一移动副与支撑板连接,第一滑板由第二直线驱动器驱动,所述第二直线驱动器一端固定在支撑板上,另一端固定在第一滑板上,在第二直线驱动器驱动作用下,第一滑板可相对支撑板滑动,进而实现铲刀相对与支撑板向一侧的侧伸;所述第二直线驱动器为液压缸或伺服电动缸。
所述第二滑板通过第二移动副与第一滑板连接,第二滑板由第三直线驱动器驱动,所述第三直线驱动器一端固定在第一滑板上,另一端固定在第二滑板上,在第三直线驱动器驱动作用下,第二滑板可相对第一滑板滑动,进而实现铲刀相对与第一滑板向另一侧的侧伸;所述第三直线驱动器为液压缸或伺服电动缸;所述第二滑板通过第十转动副与铲刀连接,所述铲刀由第四直线驱动器驱动,所述第四直线驱动器一端通过第十一转动副与第二滑板连接,另一端通过第十二转动副与铲刀连接,所述铲刀在第四直线驱动器驱动作用下,可相对第二滑板转动,进而实现铲刀切削角改变;所述第四直线驱动器为液压缸或伺服电动缸。
相比现有平地机刮土工作装置采用单个直线驱动器完成铲刀左、右侧移,该种基于回转平动机构的平地机刮土工作装置采用双滑板、双直线驱动器完成铲刀侧移,铲刀向每一侧侧移均在独立直线驱动器驱动下完成,所述铲刀在第一滑板、第二滑板带动下,以及在第二直线驱动器、第三直线驱动器驱动下,铲刀可实现长距离侧移(铲刀相对于机架左、右侧伸)。
该种基于回转平动机构的平地机刮土工作装置在机架、第一回转台、平动机构、第二回转台、铲刀机构配合作用下,铲刀不仅可实现铲刀升降运动、倾斜运动、回转运动、引出运动等动作的平动,铲刀大距离侧移(铲刀相对于机架左、右侧伸)、刮刀直移(沿机械行驶方向)、铲刀切削角改变等六自由度可控调整,而且相比现有平地机刮土工作装置复杂的空间耦合运动,具有灵活性好、运动耦合度低、控制难度低,动作空间大、支撑刚性和稳定性好等特点,可更好的满足施工技术要求较高的平整及整形作业。
本发明的一种基于回转平动机构的平地机刮土工作装置与现有技术相比,所产生的有益效果是:
1)现有平地机依赖摆架实现铲刀随回转圈侧移(即牵引架引出)时,铲刀运动为复杂空间运动,而该种基于回转平动机构的平地机刮土工作装置的第一回转台配合平动机构不仅可实铲刀机构大距离引出,而且操纵控制简单,配合第二回转台,可以实现铲刀机构平动以及精确引出控制。
2)相比现有平地机牵引架通过球铰与机架连接的方式,该种基于回转平动机构的平地机刮土工作装置利用第一回转台与机架连接,大幅提升了结构刚度以及抗负载能力,提升了铲刀机构平整或整形时的稳定性。
3)该种基于回转平动机构的平地机刮土工作装置可实现铲刀机构在升降、倾斜移动、侧移等动作的平动,相比现有平地机铲刀复杂的耦合运动控制,有效降低了铲刀控制难度,更好的满足施工要求;相比现有平地机刮土工作装置依赖复杂的耦合空间运动实现铲刀运动,采用平动机构的该种平地机刮土工作装置运动准确性、可控性、稳定性等动态性能更好,更能满足铲刀机构高质量的平整或整形施工技术要求。
4)相比现有平地机依赖复杂的耦合运动或手动调节铲刀倾斜角实现铲刀边坡作业,该种基于回转平动机构的平地机刮土工作装置不仅铲刀倾斜角度易控制,而且在第一回转台、平动机构、第二回转台的配合下,铲刀机构在边坡作业中可实现平动,使铲刀更好的满足边坡平整及整形需要。
5)该种基于回转平动机构的平地机刮土工作装置的铲刀不仅可实现铲刀升降运动、倾斜运动、回转运动、引出运动等动作的平动,铲刀大距离侧移(铲刀相对于机架左、右侧伸)、刮刀直移(沿机械行驶方向)、铲刀切削角改变等六自由度可控调整,而且相比现有平地机刮土工作装置复杂的空间耦合运动,具有灵活性好、运动耦合度低、控制难度低,动作空间大、支撑刚性和稳定性好等特点,可更好的满足施工技术要求较高的平整及整形作业。
附图说明
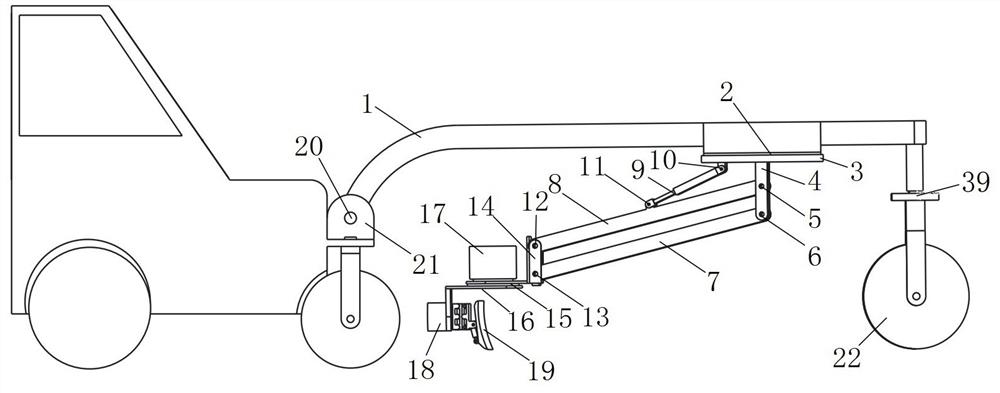
图1为本发明所述的一种基于回转平动机构的平地机刮土工作装置主视图。
图2为本发明所述的一种基于回转平动机构的平地机刮土工作装置立体图。
图3为本发明所述的一种基于回转平动机构的平地机刮土工作装置示意图。
图4为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀机构示意图。
图5为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀机构引出示意图。
图6为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀机构回转示意图。
图7为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀机构平动上升示意图。
图8为本发明所述的一种基于回转平动机构的平地机刮土工作装置俯视图。
图9为本发明所述的一种基于回转平动机构的平地机刮土工作装置第二回转台及铲刀机构示意图。
图10为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀机构局部示意图。
图11为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀示意图。
图12为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀倾斜示意图。
图13为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀侧移示意图之一。
图14为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀侧移示意图之二。
图15为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀侧移示意图之三。
图16为本发明所述的一种基于回转平动机构的平地机刮土工作装置铲刀侧移示意图之四。
图17为本发明所述的一种基于回转平动机构的平地机刮土工作装置支撑板示意图。
图18为本发明所述的一种基于回转平动机构的平地机刮土工作装置支撑板和第一滑板示意图。
图19为本发明所述的一种基于回转平动机构的平地机刮土工作装置第一滑板示意图。
图20为本发明所述的一种基于回转平动机构的平地机刮土工作装置第二滑板示意图。
具体实施方式
以下通过附图和实施例对本发明的技术方案作进一步说明。
对照图1、图2、图3、图4,一种基于回转平动机构的平地机刮土工作装置,包括机架1、第一回转台3、平动机构、第二回转台16、铲刀机构,所述机架1一端与前车架22连接,另一端与后车架21连接,所述第一回转台3通过第一转动副2安装在机架1上,由第一驱动元件40驱动,所述第一驱动元件40为液压马达或电机,在其驱动作用下,第一回转台3可相对机架1转动,配合平动机构可实现铲刀机构引出。
对照图2、图5、图6,现有平地机依赖摆架实现铲刀随回转圈侧移(即牵引架引出)时,铲刀运动为复杂空间运动,而第一回转台3配合平动机构不仅可实铲刀机构大距离引出,而且操纵控制简单,配合第二回转台16,可以实现铲刀机构平动以及精确引出控制。另外,相比现有平地机牵引架通过球铰与机架连接的方式,该种基于回转平动机构的平地机刮土工作装置利用第一回转台与机架连接,大幅提升了结构刚度以及抗负载能力,提升了铲刀机构平整或整形时的稳定性。
对照图1、图2、图3,所述平动机构为平面机构,包括纵梁4、第一连杆7、第二连杆8、动平台14,所述纵梁4、第一连杆7、第二连杆8、动平台14组成平面双连杆四杆机构,所述纵梁4固定安装在第一回转台3上,第一连杆7一端通过第二转动副6与纵梁4连接,另一端通过第三转动副13与动平台14连接,所述第二连杆一端通过第四转动副5与纵梁4连接,另一端通过第五转动副12与动平台14连接;所述第二转动副6与第三转动副13之间的孔心距,它和第四转动副5与第五转动副12之间的孔心距相同,所述第四转动副5与第二转动副6之间的孔心距,它和第五转动副12与第三转动副13之间的孔心距相等,因此所述纵梁4、第一连杆7、第二连杆8、动平台14构成平行四边形结构;所述第二转动副6与第四转动副5之间的孔心连线和第一转动副2的回转轴线平行,因此当平动机构运动时,第五转动副12与第三转动副13之间的孔心连线,它始终和第一转动副2的回转轴线平行,即动平台14始终相对第一回转台3平动;所述第二连杆8由第一直线驱动器9驱动,所述第一直线驱动器9一端通过第六转动副10与第一回转台3连接,另一端通过第七转动副11与第二连杆8连接,所述第一直线驱动器9为液压缸或伺服电动缸。
对照图1、图3、图7、图8,在实际工程应用中,当该种新型平地机置于水平地面上,此时第一回转台3回转轴线与地面垂直,当第一直线驱动器9伸缩时,带动第二连杆8绕第四转动副5上下摆动,动平台14在第一连杆7配合下将相对地面以及第一回转台3实现上下平动,在第一回转台3、平动机构、第二回转台16配合下,该种基于回转平动机构的平地机刮土工作装置可实现铲刀机构在升降、倾斜移动、侧移等动作的平动,相比现有平地机铲刀复杂的耦合运动控制,有效降低了铲刀控制难度,更好的满足施工要求;相比现有平地机刮土工作装置依赖复杂的耦合空间运动实现铲刀运动,采用平动机构的该种平地机刮土工作装置运动准确性、可控性、稳定性等动态性能更好,更能满足铲刀机构高质量的平整或整形施工技术要求。
对照图1、图5、图6、图9,所述第二回转台16通过第八转动副15与动平台14连接,所述第二回转台16由第二驱动元件17驱动,在其驱动下,第二回转台16相对动平台14旋转,满足铲刀机构平整或整平作业需要。所述第八转动副15的回转轴线与第一转动副2的回转轴线平行,所述第二驱动元件17为液压马达或电机。
对照图1、图4、图9、图10、图11,所述铲刀机构包括支撑板24、第一滑板25、第二滑板26、铲刀19,所述支撑板24通过第九转动副23与第二回转台16连接,所述第九转动副23回转轴线与第八转动副15的回转轴线垂直,所述支撑板24由第三驱动元件18驱动,所述第三驱动元件18为液压马达或电机,在其驱动作用下,对照图12,支撑板24可相对第二回转台16转动,进而实现铲刀机构倾斜,满足边坡平整及整形作业需要。相比现有平地机依赖复杂的耦合运动或手动调节铲刀倾斜角实现铲刀边坡作业,该种基于回转平动机构的平地机刮土工作装置不仅铲刀19倾斜角度易控制,而且在第一回转台3、平动机构、第二回转台16的配合下,铲刀机构在边坡作业中可实现平动,使铲刀19更好的满足边坡平整及整形需要。
对照图4、图9、图10、图13、图14,所述第一滑板25通过第一移动副30与支撑板24连接,第一滑板25由第二直线驱动器32驱动,所述第二直线驱动器32一端固定在支撑板24上,另一端固定在第一滑板25上,在第二直线驱动器32驱动作用下,第一滑板25可相对支撑板24滑动,进而实现铲刀19相对与支撑板24向一侧的侧伸;所述第二直线驱动器32为液压缸或伺服电动缸。
对照图4、图9、图10、图15、图16,所述第二滑板26通过第二移动副31与第一滑板25连接,第二滑板26由第三直线驱动器41驱动,所述第三直线驱动器41一端固定在第一滑板25上,另一端固定在第二滑板26上,在第三直线驱动器41驱动作用下,第二滑板26可相对第一滑板25滑动,进而实现铲刀19相对与第一滑板25向另一侧的侧伸;所述第三直线驱动器41为液压缸或伺服电动缸;所述第二滑板26通过第十转动副27与铲刀19连接。
现通过一个具体实施例对铲刀机构作进一步表述和说明:
对照图4、图9、图10,所述铲刀机构包括支撑板24、第一滑板25、第二滑板26、铲刀19,支撑板24一侧通过第九转动副23与第二回转台16连接,支撑板24另一侧安装有第一导轨33,所述第九转动副23回转轴线与第八转动副15的回转轴线垂直,所述支撑板24由第三驱动元件18驱动,在其驱动作用下,对照图5、图6、图12,支撑板24可相对第二回转台16转动,进而实现铲刀机构倾斜,满足边坡平整及整形作业需要,相比现有平地机依赖复杂的耦合运动或手动调节铲刀倾斜角实现铲刀边坡作业,该种基于回转平动机构的平地机刮土工作装置不仅铲刀19倾斜角度易控制,而且在第一回转台3、平动机构、第二回转台16的配合下,铲刀机构在边坡作业中可实现平动,使铲刀19更好的满足边坡平整及整形需要。
对照图4、图9、图17、图18、图19,所述第一滑板25一侧通过第一移动副30与支撑板24的第一导轨33连接,所述第一滑板25另一侧安装有第二导轨38,第一滑板25由第二直线驱动器32驱动,所述第二直线驱动器32为液压缸或伺服电动缸,所述第二直线驱动器32的缸体端34固定在支撑板24上,第二直线驱动器32的推杆端35固定在第一滑板25上,在第二直线驱动器32驱动作用下,对照图13、图14,第一滑板25可相对支撑板24滑动,进而实现铲刀19相对与支撑板24向一侧的侧伸。
对照图4、图9、图18、图20,所述第二滑板26一侧通过第二移动副31与第一滑板25连接,另一侧通过第十转动副27与铲刀19连接,所述第二滑板26由第三直线驱动器41驱动,所述第三直线驱动器41为液压缸或伺服电动缸,所述第三直线驱动器41的缸体端37固定在第一滑板25上,第三直线驱动器41的推杆端36固定在第二滑板26上,在第三直线驱动器41驱动作用下,对照图15、图16,第二滑板26可相对第一滑板25滑动,进而实现铲刀19相对与第一滑板25向另一侧的侧伸。
相比现有平地机刮土工作装置采用单个直线驱动器完成铲刀左、右侧移,该种基于回转平动机构的平地机刮土工作装置采用双滑板、双直线驱动器完成铲刀侧移,铲刀向每一侧侧移均在独立直线驱动器驱动下完成,所述铲刀19在第一滑板25、第二滑板26带动下,以及在第二直线驱动器32、第三直线驱动器41驱动下,铲刀19可实现长距离侧移(铲刀19相对于机架1左、右侧伸)。
对照图9、图10、图11,所述铲刀19由第四直线驱动器28驱动,所述第四直线驱动器28一端通过第十一转动副42与第二滑板26连接,另一端通过第十二转动副29与铲刀19连接,所述铲刀19在第四直线驱动器28驱动作用下,对照图12,可相对第二滑板26转动,进而实现铲刀19切削角改变;所述第四直线驱动器28为液压缸或伺服电动缸。
对照图1、图2、图5、图6、图7、图12、图14、图16,该种基于回转平动机构的平地机刮土工作装置在机架1、第一回转台3、平动机构、第二回转台16、铲刀机构配合作用下,铲刀19不仅可实现铲刀升降运动、倾斜运动、回转运动、引出运动等动作的平动,铲刀大距离侧移(铲刀相对于机架左、右侧伸)、刮刀直移(沿机械行驶方向)、铲刀切削角改变等六自由度可控调整,而且相比现有平地机刮土工作装置复杂的空间耦合运动,具有灵活性好、运动耦合度低、控制难度低,动作空间大、支撑刚性和稳定性好等特点,可更好的满足施工技术要求较高的平整及整形作业。
除说明书所述的技术特征外,均为本专业技术人员的已知技术。
- 一种基于回转平动机构的平地机刮土工作装置
- 一种基于回转平动机构的平地机刮土工作装置