一种连续式去根生产线
文献发布时间:2023-06-19 12:24:27
技术领域:
本发明涉及农业设备技术领域,具体的说是一种连续式去根生产线。
背景技术:
大蒜既是一种不可缺少的调味品,也可以有效预防感冒等疾病,但目前在收获大蒜进行加工处理的时候,需要人工将大蒜放置到切刀处进行修剪去根,在切割的过程中容易切到手,安全系数较低且去根效率慢。
公开号为CN204482334U的一篇中国实用新型,其公开了一种大蒜去根机,包括底座,底座上固定有动力源,动力源通过输出轴与圆形齿刀固定连接,圆形齿刀外部罩有防护罩,防护罩与底座固定连接,底座的两侧固定有连接支架,防护罩包括三个侧板:前侧板、后侧板和第三侧板以及一个顶板,为抽屉型结构。
但是发明人发现,在对大蒜去根的过程中还存在以下问题:在去根之前需要人工对大蒜进行去泥处理,存在时间消耗多和劳动强度大等问题;以及在去根的时候不能保证完全切除根须以及不能将大蒜茎进行切除,存在切除根须不等距的缺陷。
发明内容:
本发明的目的是针对现有技术的不足之处,提供一种连续式去根生产线,通过设置传输机构带动限位组件及承载机构向后移动,在承载机构的移动路径上依次设置转动组件、第一切割组件及第二切割组件,在传输机构的一侧还设置导向组件,在传输机构的尾端设置接料篓,解决了现在对大蒜去根去茎的过程中效率低、劳动强度大以及不能等距切除根须的问题。
本发明的技术解决措施如下:
一种连续式去根生产线,包括传输机构,所述传输机构上设置有若干限位组件,所述限位组件上转动设置有承载机构,所述承载机构的移动路径上从前往后依次设置有转动组件、第一切割组件及第二切割组件,所述传输机构的一侧设置有导向组件;所述承载机构用于装载大蒜并在传输机构的带动下向后传输,所述转动组件用于带动传输经过的承载机构连同大蒜一起转动,对大蒜的根须进行去泥理顺处理,所述承载机构在导向组件的作用下将竖立的大蒜调整为平躺状态,所述限位组件在导向组件的作用下将承载机构连同大蒜进行侧移,将大蒜侧移到恰好能够切除根部及茎部的位置,所述第一切割组件用于对完成状态调整并移动至第一切割组件处的大蒜进行去根处理,所述第二切割组件用于对完成去根处理并移动至第二切割组件处的大蒜进行去茎处理。
作为一种优选,所述传输机构包括支撑架、固定设置在支撑架上的电机以及由电机带动下的传输带,所述传输带尾端还设置有接料篓。
作为一种优选,所述限位组件包括固定设置在传输带上的若干滑座、开设在滑座内的滑槽以及滑动设置在滑槽内的滑块,所述滑块与滑槽两侧均连接有弹簧。
作为一种优选,所述承载机构包括转动设置在滑块上的支撑杆、一端转动设置在支撑杆上的摆动臂、固定设置在摆动臂另一端的横板、固定设置在横板两端的支撑柱、固定设置在支撑柱上的承载筒、开设在承载筒下端的去根空间、转动设置在承载筒上的转动环、固定设置在转动环上的导向臂、开设在导向臂上的凹槽、固定设置在承载筒下端的若干支撑块、转动设置在承载筒上端的筒盖、固定设置在筒盖上的支撑槽、开设在支撑槽上的去茎空间以及开设在筒盖上的空槽,空槽有效的使大蒜与支撑槽更为贴合,在对大蒜进行切割的时候,大蒜更为稳固。
作为一种优选,所述转动组件包括固定设置在支撑杆上的齿轮、固定设置在齿轮一侧的齿条a以及固定设置在齿轮另一侧的齿条b。
作为一种优选,所述第一切割组件包括支撑腿a以及固定设置在支撑腿a上的V型切刀a,V型切刀a对根部切除时覆盖面更广,从而使根部完全切除。
作为一种优选,所述第二切割组件包括支撑腿b以及固定设置在支撑腿b上的V型切刀b。
作为又一种优选,所述导向组件包括底座以及固定设置在底座上的导轨,所述导轨包括下降段a、下降段b、侧推段a、侧推段b、上升段a、上升段b、回转段以及平滑段。
本发明的有益效果在于:
1.本发明中在传输机构上设置若干限位组件,在限位组件上转动设置承载机构,传输机构带动承载机构及承载机构内的大蒜向后传输,并在承载机构移动路径上依次设置转动组件、第一切割组件及第二切割组件,在传输机构的一侧还设置导向组件,承载机构在传输经过转动组件时连同大蒜一起转动,承载机构还在导向组件的作用下调整大蒜的放置状态,限位组件在导向组件的作用下先将大蒜向第一切割组件方向进行侧推,第一切割组件将侧推至切割处的大蒜首先进行去根处理,限位组件在导向组件的作用下再将大蒜向第二切割组件方向进行侧推,第二切割组件将侧推至切割处的大蒜完成去茎处理,解决了现有大蒜去根去茎过程中需要人工去泥,不能等距切割的问题。
2.本发明中限位组件内的滑块与滑槽两端之间均连接有弹簧,使得在侧推大蒜时有一定的缓冲,避免大蒜根部直接撞到设备上,保证了大蒜的完整性;并在第一步侧推完成去根后,依靠弹簧将滑块进行复位,使得后续向另一侧推移对大蒜进行去茎处理连续性更好。
3.本发明中的承载机构中承载筒的下端设置有若干支撑块,在大蒜放入承载筒时对大蒜进行有效的支撑,使得大蒜根部正好处在去根空间范围内,方便后续第一切割组件对大蒜进行等距去根处理,提升了大蒜去根的标准性;还在筒盖上开设空槽,空槽在筒盖闭合时使得大蒜在去茎处理时与支撑槽更为贴合,有效解决了大蒜在去茎处理时易错位的问题。
4.本发明中设置有转动组件,转动组件中的齿条a和齿条b设置在承载机构的两侧,在承载机构先经过齿条a时连同大蒜进行旋转,再经过齿条b时连同大蒜进行反向旋转,达到去泥效果的同时还将大蒜的根须理顺,方便后续切割,提升了大蒜去根去茎过程中的自动化程度。
5.本发明中在传输机构尾端还设置有接料篓,接料篓用来接取从承载机构中下落并完成去根去茎处理的大蒜,省去了人工拾取整理的成本,降低了劳动强度的同时还使得工作区域干净整洁。
综上所述,本连续式去根生产线具有自动去泥整理、切割效率快、标准性较高及减轻了工作人员劳动强度的优点,尤其适用于农业设备技术领域。
附图说明:
下面结合附图对本发明做进一步的说明:
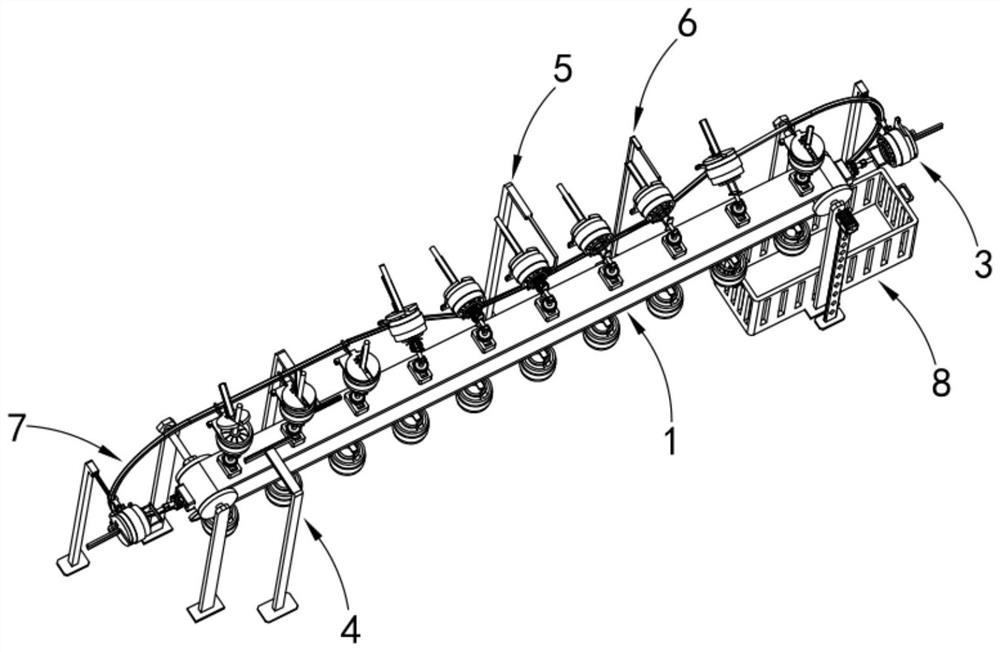
图1为连续式去根生产线的结构示意图;
图2为限位组件及承载机构的结构示意图;
图3为传输机构的结构示意图;
图4为图3中A处的放大示意图;
图5为限位组件中弹簧的结构示意图;
图6为承载机构的结构示意图;
图7为图6中B处的放大示意图;
图8为去根空间及去茎空间的结构示意图;
图9为转动组件的结构示意图;
图10为第一切割组件的结构示意图;
图11为第二切割组件的结构示意图;
图12为导向组件的结构示意图。
具体实施方式:
下面结合附图对本发明实施例中的技术方案进行清楚、完整地说明。
实施例一
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
如图1至图12所示,一种连续式去根生产线,包括传输机构1,所述传输机构1上设置有若干限位组件2,所述限位组件2上转动设置有承载机构3,所述承载机构3的移动路径上从前往后依次设置有转动组件4、第一切割组件5及第二切割组件6,所述传输机构1的一侧设置有导向组件7;所述承载机构3用于装载大蒜10并在传输机构1的带动下向后传输,所述转动组件4用于带动传输经过的承载机构3连同大蒜10一起转动,对大蒜10的根须进行去泥理顺处理,所述承载机构3在导向组件7的作用下将竖立的大蒜10调整为平躺状态,所述限位组件2在导向组件7的作用下将承载机构3连同大蒜10进行侧移,将大蒜10侧移到恰好能够切除根部及茎部的位置,所述第一切割组件5用于对完成状态调整并移动至第一切割组件5处的大蒜10进行去根处理,所述第二切割组件6用于对完成去根处理并移动至第二切割组件6处的大蒜10进行去茎处理。
值得一提的是,本实施例中在传输机构1上设置若干限位组件2,在限位组件2上转动设置承载机构3,传输机构1带动承载机构3及承载机构3内的大蒜10向后传输,并在承载机构3移动路径上依次设置转动组件4、第一切割组件5及第二切割组件6,在传输机构的一侧还设置导向组件7,承载机构3在传输经过转动组件4时连同大蒜10一起转动,承载机构3还在导向组件7的作用下调整大蒜10的放置状态,限位组件2在导向组件7的作用下先将大蒜10向第一切割组件5方向进行侧推,第一切割组件5将侧推至切割处的大蒜10首先进行去根处理,限位组件2在导向组件7的作用下再将大蒜10向第二切割组件6方向进行侧推,第二切割组件6将侧推至切割处的大蒜10完成去茎处理,解决了现有大蒜10去根去茎过程中需要人工去泥,不能等距切割的问题。
进一步地,所述传输机构1包括支撑架11、固定设置在支撑架11上的电机12以及由电机12带动下的传输带13。
进一步地,所述限位组件2包括固定设置在传输带13上的若干滑座21、开设在滑座21内的滑槽22以及滑动设置在滑槽22内的滑块23,所述滑块23与滑槽22两侧均连接有弹簧24。
需进一步说明的是,本实施例中限位组件2内的滑块23与滑槽22两端之间均连接有弹簧24,使得在侧推大蒜10时有一定的缓冲,避免大蒜10根部直接撞到设备上,保证了大蒜10的完整性;并在第一步侧推完成去根后,依靠弹簧24将滑块23进行复位,使得后续向另一侧推移对大蒜10进行去茎处理连续性更好。
进一步地,所述承载机构3包括转动设置在滑块23上的支撑杆31、一端转动设置在支撑杆31上的摆动臂32、固定设置在摆动臂32另一端的横板33、固定设置在横板33两端的支撑柱34、固定设置在支撑柱34上的承载筒35、开设在承载筒35下端的去根空间36、转动设置在承载筒35上的转动环37、固定设置在转动环37上的导向臂38、开设在导向臂38上的凹槽39、固定设置在承载筒35下端的若干支撑块311、转动设置在承载筒35上端的筒盖312、固定设置在筒盖312上的支撑槽313、开设在支撑槽313上的去茎空间314以及开设在筒盖312上的空槽315。
此外,本实施例中的承载机构3中承载筒35的下端设置有若干支撑块311,在大蒜10放入承载筒35时对大蒜10进行有效的支撑,使得大蒜10根部正好处在去根空间36范围内,方便后续第一切割组件5对大蒜10进行等距去根处理,提升了大蒜10去根的标准性;还在筒盖312上开设空槽315,空槽315在筒盖312闭合时使得大蒜10在去茎处理时与支撑槽313更为贴合,有效解决了大蒜10在去茎处理时易错位的问题。
进一步地,所述转动组件4包括固定设置在支撑杆31上的齿轮41、固定设置在齿轮41一侧的齿条a42以及固定设置在齿轮41另一侧的齿条b43。
此外,本实施例中设置有转动组件4,转动组件4中的齿条a42和齿条b43设置在承载机构3的两侧,在承载机构3先经过齿条a42时连同大蒜10进行旋转,再经过齿条b43时连同大蒜10进行反向旋转,达到去泥效果的同时还将大蒜10的根须理顺,方便后续切割,提升了大蒜10去根去茎过程中的自动化程度。
进一步地,所述第一切割组件5包括支撑腿a51以及固定设置在支撑腿a51上的V型切刀a52。
进一步地,所述第二切割组件6包括支撑腿b61以及固定设置在支撑腿b61上的V型切刀b62。
更进一步地,所述导向组件7包括底座71以及固定设置在底座71上的导轨72,所述导轨72包括下降段a73、下降段b74、侧推段a75、侧推段b76、上升段a77、上升段b78、回转段79以及平滑段711。
实施例二
如图1所示,其中与实施例一中相同或相应的部件采用与实施例一相应的附图标记,为简便起见,下文仅描述与实施例一的区别点;该实施例二与实施例一的不同之处在于:所述传输带13尾端还设置有接料篓8。
本实施例中在传输机构1尾端还设置有接料篓8,接料篓8用来接取从承载机构3中下落并完成去根去茎处理的大蒜10,省去了人工拾取整理的成本,降低了劳动强度的同时还使得工作区域干净整洁。
工作过程
首先由工作人员将大蒜10放置到承载机构3中的承载筒35中,传输机构1带动限位组件2、承载机构3及承载筒35内的大蒜10向后传输,承载机构3传输经过转动组件4的过程中,在齿条a42的作用下,承载筒35连同大蒜10一起旋转,再通过齿条b43的作用下,承载筒35连同大蒜10进行反向旋转,此过程对大蒜10进行去泥处理,随后承载筒35连同大蒜10继续向后传输,之后在导向组件7中下降段a73和下降段b74的作用下,承载筒35将大蒜10从竖立状态调整为平躺状态,之后限位组件2中的滑块23在导向组件7中侧推段a75的作用下,带动承载机构3向第一切割组件5方向侧移,在经过第一切割组件5时,第一切割组件5中的V型切刀a52从去根空间36中穿过将平躺状态下的大蒜10根部切除,随后滑块23通过弹簧24复位,并在导向组件7中侧推段b76的作用下带动承载机构3向第二切割组件6方向侧移,在经过第二切割组件6时,第二切割组件6中的V型切刀b62从去茎空间穿过将平躺状态下的大蒜10进行去茎处理,最后承载筒35经过导向组件7中回转段79的过程中,将筒盖312打开,将完成去根去茎处理的大蒜10下放至传输机构1尾端的接料篓8中,以上过程循环往复。
在本发明的描述中,需要理解的是,术语“前后”、“左右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对发明的限制。
当然在本技术方案中,本领域的技术人员应当理解的是,术语“一”应理解为“至少一个”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
以上结合附图所述的仅是本发明的优选实施方式,但本发明并不限于上述实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可作出各种变形和改进,这些也应该视为本发明的保护范围,都不会影响本发明实施的效果和实用性。
- 一种连续式去根生产线
- 一种大蒜切杆去根装置及加工生产线