陀螺稳定腿式机器人
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种陀螺稳定的腿式机器人。
背景技术
双足机器人有望具有与人类相当的移动能力,具有在轮式车辆无法到达的,或四足或六足动物难以驾驭的复杂地形中导航的能力。这种移动性显着增加了设计、控制和驱动的成本和复杂性;仿人机器人技术的最新进展凸显了这一点,其中一个步行平台可能要花费数十万美元。此类机器人使用复杂的运动传感以及结合功能强大的致动器进行控制,通过与地面接触来快速施加所需的平衡力。然而,在低端任务中,例如复合/区域安全、城市巡逻、搜索和救援以及家庭应用,在这些任务中,更经济但功能较弱的动态双足行走机器可能是有用的。这些机器人必然会使用不同的、比调节地面接触力平衡更简单的控制方案。
申请人确定了这种机器的四个关键特征:双足站立;楼梯、坡道和粗糙地面的地形处理;快速(动态)步态;以及不依赖关节臂来保持平衡。双足站立和地形处理使机器人能够处理构建的人类空间,需要快速步态以允许机器人以有用的速度移动并及时覆盖地面。动态步态对于快速运动和低成本来说都是必不可少的,因为将重心保持在机器人支撑多边形上的姿势转移既缓慢又需要髋部和踝关节的腿部外展驱动。避免使用复杂的铰接臂/钟摆来保持平衡的基本原理是相似的,另外还要考虑到移动的附肢可能不适合在人类周围使用,因为它们可能会造成危险。这些挑战需要补偿系统来抵制干扰。
在每个步伐中,动态双足机器人将其质心移动到其支撑点/多边形之外。经典的零力矩点控制涉及平衡脚的接触点以将角动量调节为零。这需要高性能的传感和驱动,以在每个时间点将四肢放置在适当的位置,从而导致昂贵的步行机器。一种更简单的方法是加入一个额外的扭矩控制装置。
一种传统方法是使用基于反作用轮的控制。反作用轮不是动态调整腿部位置以纠正其平衡,而是将角动量传递给移动的质量以引起反作用扭矩来对抗不平衡。简单的反作用轮长期以来一直用于诸如卫星、轮式机器人和“行走”机器人(如Cubeli)(M.Ga jamohan、M.Merz、I.Thommen和R.D'Andrea,“该Cubli:一个可以跳跃和平衡的立方体”,在Proc.IEEE/RSJ智能机器人与系统国际会议,2012年)。然而,反作用轮的一个关键限制是,普通电动机和轴承的运行对车轮可达到的速度设定了上限,因此加速度的维持-在最大速度下,反作用轮饱和,不再进一步势头可能会被取消。增加飞轮的质量允许在饱和之前进行更大的动量传递,但代价是必须增加重量。
Wong&Hung(Terence C.F.Wong和Y.S.Hung,"基于陀螺耦合的双足动态步行稳定性"in Proc.IEEE国际智能与系统联合研讨会,1996.)公开了一种基于陀螺耦合的双足动态步行稳定性的策略,使用动态步行机,其中安装在两足动物顶部的陀螺仪经过加工以实现冠状面和矢状面的平衡。设计了一种步态并提供了模拟结果,以表明所提出的平衡方法的可行性。然而,陀螺仪的步态和进动必须紧密同步,并且这种策略的使用对可用的步态施加了限制性约束。
JP2004009205A公开了另一双腿步行机器人姿势稳定的例子。机器人有主体;一双腿设于主体下部;一个或多个控制力矩陀螺仪设置在主体和一双腿中的至少一个上,以产生用于改变双腿步行机器人的姿势的扭矩。然而,这使用复杂的双型CMG以仅在单轴线上提供扭矩。
希望提供一种简化的陀螺稳定腿式机器人,其允许改进的方位控制,而与腿的运动无关。
本说明书中对任何先前出版物(或从它获得的信息)或任何已知事项的引用不是也不应被视为对先前出版物(或从它获得的信息)或已知事项的认可或承认或任何形式的暗示其构成本说明书所涉及的努力领域中的公知常识的一部分。
发明内容
在一个广泛的形式中,本发明的一方面寻求提供一种陀螺稳定的腿式机器人,包括:主体;联接到主体并且被配置为在使用中提供机器人跨表面的腿式运动的多条腿;用于检测主体的角方位的方位传感器;安装在机器人上的控制力矩陀螺仪,该控制力矩陀螺仪包括:在使用中围绕转子自旋轴线旋转的转子;用于相对于机器人支撑转子的倾斜机构,该倾斜机构用于使转子自旋轴线围绕两个陀螺旋转轴线旋转,从而产生各自的陀螺反作用扭矩;陀螺仪控制器,其被配置为至少部分地基于检测到的主体的角方位来控制倾斜机构的操作,从而产生陀螺反作用扭矩以在机器人的腿式运动期间至少部分地稳定主体的角方位。
在一个实施例中,方位传感器用于至少检测主体关于主体的俯仰轴线和侧倾轴线的角方位,并且其中陀螺仪控制器被配置为控制倾斜机构的操作,从而产生陀螺反作用扭矩以在机器人的腿式运动期间至少部分地稳定主体关于俯仰轴线和侧倾轴线的角方位。
在一个实施例中,每条腿具有一个或多个相应的腿致动器,并且机器人包括运动控制器,该运动控制器被配置为控制腿致动器的操作以引起机器人的腿式运动,并且其中陀螺仪控制器与腿运动控制器分离。
在一个实施例中,机器人的腿式运动涉及不同的腿姿势,包括一些不稳定的腿姿势,其中围绕主体的俯仰轴线和侧倾轴线中的至少一个引起偏置力矩,并且其中所产生的陀螺反作用扭矩至少部分抵消偏置力矩。
在一个实施例中,陀螺仪控制器还被配置为:获得当前腿姿势的指示;并根据当前腿姿势控制倾斜机构的操作。
在一个实施例中,陀螺仪控制器还被配置为:基于当前腿姿势确定估计的偏置力矩;以及至少部分地基于估计的偏置力矩控制倾斜机构的操作,从而产生陀螺反作用扭矩以至少部分地抵消估计的偏置力矩。
在一个实施例中,陀螺仪控制器还被配置为:确定机器人处于稳定的腿姿势;并且在机器人处于稳定的腿姿势时,控制倾斜机构的操作以使转子自旋轴线旋转至预定的转子自旋轴线方向。
在一个实施例中,陀螺仪控制器还被配置为:获得机器人腿式运动中下一腿姿势的指示;当机器人处于稳定的腿姿势时,控制倾斜机构的操作,使转子自旋轴线根据下一腿姿势旋转到预定的转子自旋轴线方向。
在一个实施例中,陀螺仪控制器包括方位稳定性子系统,其用于基于所检测到的主体关于俯仰轴线和侧倾轴线的角方位来产生陀螺反作用扭矩以稳定主体的方位。
在一个实施例中,陀螺仪控制器包括偏置补偿子系统,其用于产生陀螺反作用扭矩以补偿基于腿姿势的估计的偏置力矩。
在一个实施例中,陀螺仪控制器包括松弛控制子系统,其用于以下至少一项:当机器人处于稳定的腿姿势时,使转子自旋轴线返回到法向方位;当机器人处于不稳定的腿姿势时,会产生陀螺反作用扭矩,使主体处于不再引起偏置力矩的方位;并且使陀螺仪轴线的旋转速度与转子自旋轴线相对于法向方位的偏差成比例地增加。
在一个实施例中,倾斜机构被配置为相对于转子自旋轴线的法相垂直方位旋转转子自旋轴线。
在一个实施例中,转子自旋轴线和相应的陀螺仪旋转轴线相互正交。
在一个实施例中,倾斜机构包括一组两个万向节,各自包括万向节致动器并且被配置为围绕陀螺仪旋转轴线旋转转子自旋轴线,并且其中陀螺仪控制器被配置为控制万向节致动器的操作。
在一个实施例中,两个万向节包括:第一万向节,其被配置为围绕陀螺仪俯仰轴线旋转转子自旋轴线;以及第二万向节,其被配置为围绕陀螺仪侧倾轴线旋转转子自旋轴线。
在一个实施例中,两个万向节包括:内部万向节,其枢转地联接到转子;外部万向节,其枢接于内部万向节并安装在机器人上。
在一个实施例中,转子在使用中以固定的转子速度旋转,并且其中陀螺反作用扭矩通过控制转子自旋轴线围绕相应的陀螺仪轴线的旋转速度来确定。
在一个实施例中,每条腿包括具有各自的髋部和膝部致动器的髋部和膝部枢轴,腿式运动由髋部和膝部致动器的旋转位置限定。
在一个实施例中,每条腿包括通过踝关节联接到腿的足部,踝关节包括用于提供与表面的销接触的两轴万向节枢轴。
在一个实施例中,每个踝关节包括足部旋后致动器,其被配置为在表面平面中向足部施加转动力矩。
在一个实施例中,每个踝关节包括用于选择性地防止踝关节旋转的制动系统。
在一个实施例中,腿被配置为允许机器人在髋部和膝部致动器停用时稳定的蹲伏位置和站立位置之间转换。
在一个实施例中,腿被配置为使得髋部枢轴和踝关节枢轴可以在蹲伏和站立位置之间的过渡期间保持竖直对齐。
在一个实施例中,机器人是包括两条腿的双足机器人。
在另一个广泛的形式中,本发明的一方面寻求提供一种在腿式机器人中使用的方位控制系统,该腿式机器人包括主体,以及联接到主体并被配置为在使用中提供机器人跨表面的腿式运动的多条腿。该方位控制系统包括:用于检测主体的角方位的方位传感器;安装在机器人上的控制力矩陀螺仪,该控制力矩陀螺仪包括:在使用中绕转子自旋轴线旋转的转子;用于相对于主体支撑转子的倾斜机构,该倾斜机构用于使转子自旋轴线围绕两个陀螺旋转轴线旋转,从而产生各自的陀螺反作用扭矩。陀螺仪控制器,其被配置为至少部分地基于检测到的主体的角方位来控制倾斜机构的操作,从而产生陀螺反作用扭矩以在机器人的腿式运动期间至少部分地稳定主体的角方位。
在另一个广泛的形式中,本发明的一方面寻求提供一种用于控制腿式机器人的方位的方法,该腿式机器人包括主体,以及联接到主体并被配置为在使用中提供机器人跨表面的腿式运动的多条腿,该方法包括:使用方位传感器检测主体的角方位;使用安装在机器人上的控制力矩陀螺仪产生陀螺反作用扭矩以在机器人的腿运动期间至少部分地稳定主体的角方位,其中,控制力矩陀螺仪包括:在使用中绕转子自旋轴线旋转的转子;用于相对于机器人支撑转子的倾斜机构,该倾斜机构用于使转子自旋轴线围绕两个陀螺旋转轴线旋转,从而产生各自的陀螺反作用扭矩,使用陀螺仪控制器产生陀螺反作用扭矩,该陀螺仪控制器被配置为至少部分地基于检测到的主体的角方位来控制倾斜机构的操作。
在另一个广泛的形式中,本发明的一方面寻求提供一种陀螺稳定的双足机器人,包括:主体;联接到主体并被配置为在使用中提供机器人跨表面的行走运动的两条腿;用于检测主体围绕主体的俯仰轴线和侧倾轴线的角方位的方位传感器;安装在机器人上的控制力矩陀螺仪,该控制力矩陀螺仪包括:在使用中绕转子自旋轴线旋转的转子;用于相对于机器人支撑转子的一组两个万向节,该两个万向节包括各自的万向节致动器,用于围绕两个陀螺仪旋转轴线旋转转子自旋轴线,从而产生各自的陀螺反作用扭矩。陀螺仪控制器被配置为至少部分地基于检测到的主体的角方位来控制万向节致动器的操作,从而产生陀螺反作用扭矩以在机器人的行走运动期间至少部分地稳定主体关于俯仰轴线和侧倾轴线的角方位。
在一个实施例中,机器人的行走运动涉及不同的腿姿势,包括单腿姿势,其中偏置力矩围绕主体的俯仰轴线和侧倾轴线中的至少一个引起,并且其中产生的陀螺反作用扭矩至少部分抵消偏置力矩。
在另一个广泛的形式中,本发明的一方面寻求提供一种陀螺稳定的腿式机器人,包括:主体;联接到主体并且被配置为在使用中提供机器人跨表面的腿式运动的多条腿;用于检测主体的角方位的方位传感器;安装在机器人上的两个控制力矩陀螺仪,每个控制力矩陀螺仪包括:在使用中围绕转子自旋轴线旋转的转子;用于相对于机器人支撑转子的倾斜机构,该倾斜机构被配置为围绕相应的陀螺旋转轴线旋转转子自旋轴线,从而产生相应的陀螺反作用扭矩。陀螺仪控制器,其被配置为至少部分地基于检测到的主体的角方位来控制两个控制力矩陀螺仪的倾斜机构的操作,从而产生陀螺反作用扭矩以在机器人的腿式运动期间至少部分地稳定主体的角方位。
在一个实施例中,方位传感器用于至少检测主体围绕主体的俯仰轴线和侧倾轴线的角方位,并且两个控制力矩陀螺仪包括:第一控制力矩陀螺仪,其被配置为产生第一陀螺反作用扭矩以至少部分地稳定主体关于俯仰轴线的角方位;以及第二控制力矩陀螺仪,其被配置为产生第二陀螺反作用扭矩以至少部分地稳定主体关于侧倾轴线的角方位。
应当理解,本发明的广义形式和它们各自的特征可以结合、可互换和/或独立地使用,并且对单独的广义形式的引用并不旨在限制。
附图简要说明
现在将参考附图描述本发明的各种示例和实施例,其中:
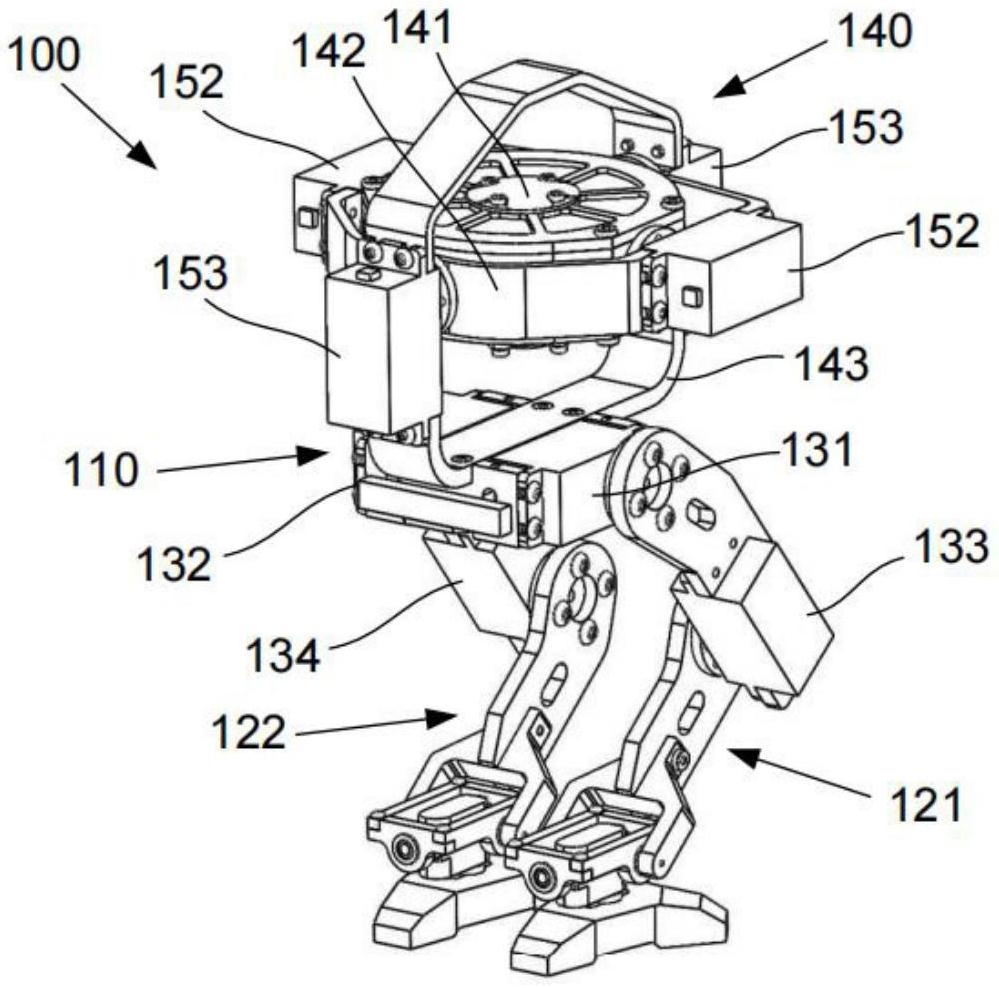
图1A是示例陀螺稳定腿式机器人的立体图;
图1B是图1A的机器人的侧视图;
图1C是图1A的机器人的截面图,示出了机器人的控制力矩陀螺仪的内部特征;
图1D是图1A的机器人的示例踝关节的前视图;
图2是与图1A的机器人一起使用的示例方位控制系统的框图;
图3是与图1A的机器人一起使用的示例控制力矩陀螺仪的示意图;
图4A是图1A的机器人的表示几何参考的立体图;
图4B是图1A的机器人单腿姿势的前视自由体图;
图5是控制架构的示例的示意图;
图6是模拟跨越不同长度的多个步伐的方位控制系统性能的图;
图7A和7B是处于测试配置中的示例陀螺稳定腿式机器人的照片;
图8是来自方位控制系统示例的测试的方位和陀螺仪旋转角的图;
图9A是陀螺稳定腿式机器人的示例的侧视示意图,其中控制力矩陀螺仪的转子自旋轴线处于垂直方向;
图9B是图9A的机器人的侧视图的示意图,其中转子自旋轴线相对于图9A的垂直方向倾斜了90°;
图10A是示例陀螺稳定腿式机器人的对应侧视图和前视图的示意图,其中转子自旋轴线向前倾斜,而机器人处于第一腿姿势;
图10B是图10A的机器人的对应侧视图和前视图的示意图,其中转子自旋轴线向后倾斜,而机器人处于第二腿姿势;
图11A是示例陀螺稳定腿式机器人的侧视图的示意图,其中横向陀螺仪偏置已经累积;
图11B是图11A的机器人的对应侧视图和前视图的示意图,其中在枢转机器人的质心的同时校正横向陀螺仪偏置;
图12A是示例陀螺稳定腿式机器人的侧视图的示意图,其中累积了纵向陀螺仪偏置;
图12B是图12A的机器人的对应侧视图和前视图的示意图,其中在使用双支撑姿势时校正了纵向陀螺仪偏置;
图13A是示例陀螺稳定腿机器人的透视图的示意图,指示由地面接触点和对应的陀螺仪去偏置轴线定义的特定双支撑姿势;
图13B是图13A的机器人的平面图的示意图,表示机器人行走时出现的不同双支撑姿势和相应的陀螺仪去偏置轴线;和
图14A至14D是由不同的旋后致动器位置限定的不同腿部构造的示意图。
具体实施方式
现在将参照图1A至图1D描述陀螺稳定的腿式机器人100的示例。
从广义上讲,机器人100包括主体110和多条腿121、122,这些腿联接到主体110并被配置为在使用中提供机器人跨表面的腿式运动。应当理解,腿式运动的特定形式将取决于腿的数量和构造。虽然下面的描述将主要集中在如图1A到1D中所示的机器人100的双腿(即双足)实施例,其能够进行行走运动,但应当理解,可以应用以下列出的技术到具有任意数量腿的机器人,从单腿跳跃机器人到具有两条以上腿的步行机器人。
机器人100适于在主体110的腿式运动期间至少部分地稳定主体110的角方位。图2是用于在机器人100中使用以提供该功能的方位控制系统200的示例的框图。
关于图2,机器人100还包括用于检测主体110的角方位的方位传感器210,并且机器人100还包括安装在机器人100上的控制力矩陀螺仪(CMG)140,如图1A和1B所示。
图1A的实施例的CMG140进一步的构造细节可以在图1C的横截面图中看到,并且为了进一步帮助理解,图3中还提供了CMG140示例的简化示意图。一般而言,CMG140包括围绕转子自旋轴线旋转的转子141和用于相对于机器人100支撑转子141的倾斜机构230(如图2所示)。倾斜机构230被配置为围绕两个陀螺旋转轴线Gx,Gy旋转转子自旋轴线Gz,从而产生各自的陀螺反作用扭矩。通常,转子141由合适的转子致动器151例如马达旋转,并且倾斜机构230可以设置有多个陀螺仪致动器240以引起转子自旋轴线Gz的旋转。
应当理解,当转子自旋轴线Gz旋转时(即当陀螺仪转子被倾斜机构230倾斜时),响应于转子角动量的变化,陀螺反作用扭矩将产生。当转子自旋轴线围绕陀螺仪轴线Gx,Gy之一旋转时,产生的陀螺反作用扭矩将垂直作用于转子自旋轴线和该陀螺仪轴线。考虑到这一点,应当理解,使用两轴倾斜机构230(即,能够围绕两个不同的陀螺仪轴线旋转转子自旋轴线的机构)能够允许产生围绕轴线的两个陀螺反作用扭矩分量,但应当注意,这些轴线将相对于转子的参考系,其可相对于机器人100的主体110及其各自的方位轴线旋转。尽管如此,可以通过以协调的方式围绕两个陀螺轴线Gx,Gy旋转转子自旋轴线Gz来提供围绕两个不同轴线作用的期望的陀螺反作用扭矩。
再次参考图2,机器人100包括陀螺仪控制器220,该陀螺仪控制器220被配置为至少部分地基于检测到的主体110的角方位(由方位传感器210提供)来控制倾斜机构230的操作,从而产生陀螺反作用扭矩以在机器人100的腿移动期间至少部分地稳定主体110的取向。通常,陀螺仪控制器220将通过控制陀螺致动器230的操作来控制倾斜机构230的操作,如下文进一步讨论的,其配置可根据倾斜机构230的特定实施例而变化。
应当理解,机器人100可以使用CMG140来控制其主体110在腿式运动期间的取向,例如步行,正如它从腿姿势转换到腿姿势。这样的设置提供的优势是可以消除静态稳定步行时缓慢或拖曳步态,或者在动态步行技术中需要复杂的控制或高性能致动器,例如零力矩点、反作用力控制和其他依赖于机器人的脚与地面之间的力相互作用以保持稳定性的方法。
通过使用倾斜机构230控制CMG140以在两个轴线上提供陀螺反作用扭矩,主体110的取向可以保持接近水平(或处于某个其他期望的角度)。应当理解,由倾斜机构230施加的转子141的旋转运动可以产生独立于腿121、122的运动的陀螺反作用扭矩。
虽然反作用轮通常被用作控制扭矩的来源,但是应当理解,CMG140的不同之处在于所施加的角动量存储在旋转质量中。在这种情况下,陀螺仪转子141在与施加的动量传递正交的方向上旋转。所产生的陀螺反作用扭矩将是转子141的轴线向速度、转子的转动惯量和垂直于陀螺轴线施加的速度的函数:
其中τ是反作用扭矩,ω
在图1A至图1D所示的机器人100的优选实施例中,倾斜机构230包括一组两个万向节142、143,用于相对于机器人100支撑转子141。两个万向节142、143分别包括万向节致动器152、153,其被配置为围绕陀螺仪旋转轴线Gx,Gy旋转转子自旋轴线Gz,陀螺仪旋转轴线对应于万向节142、143的枢轴。在这种情况下,万向节致动器152、153充当陀螺仪致动器240,如上所述,并且陀螺仪控制器220被配置为控制万向节致动器152、153的操作。应当理解,以这种方式使用双万向节控制力矩陀螺仪140,响应万向节致动器152、153的旋转运动,能够允许在两个轴线上产生陀螺反作用扭矩分量。
然而,应当理解,控制力矩陀螺仪140的倾斜机构230不一定需要使用如图所示的两个万向节142、143。例如可替代地,合适的倾斜机构230可以使用斯图尔特平台或类似的平行机器人平台来实现,被配置以支撑转子提供至少两个旋转自由度。在这种情况下,倾斜机构可以包括一组线性致动器形式的陀螺仪致动器240,其可以由陀螺仪控制器220以协调的方式控制以引起转子自旋轴线Gz的期望旋转。
因此,虽然以下描述将集中于倾斜机构230的双万向节实施方式,特别是关于用于控制万向节致动器152、153的操作的陀螺仪控制器220的特定配置,但应当理解可以将本文描述的技术应用于其他合适形式的具有不同致动器布置的倾斜机构230。
在优选实施例中,方位传感器210可用于至少检测主体关于主体110的俯仰轴线和侧倾轴线的角方位。陀螺仪控制器220因此可被配置为控制倾斜机构230的操作使得在机器人100的腿式运动期间产生陀螺反作用扭矩以至少部分地稳定主体110关于其俯仰轴线和侧倾轴线的角方位。因此,可以使用单个CMG140在俯仰和侧倾两者中稳定机器人100通过控制由所需要的倾斜机构提供的转子自旋轴线Gz的旋转运动(例如通过控制万向节致动器152、153的操作)来实现期望的稳定性能。
通常,每条腿121、122具有一个或多个相应的腿致动器131、132、133、134,并且机器人100可以包括运动控制器(未示出),其被配置为控制腿致动器131、132、133、134的操作以引起机器人100的腿运动。优选地,陀螺仪控制器220与这样的腿运动控制器分离。因此,机器人100的运动和取向控制功能可以解耦。使用该技术,机器人100的取向及其行走稳定性可以局部独立于腿部运动。因此,不需要精确的腿定位和扭矩产生并且更便宜,可以使用较低性能的腿致动器131、132、133、134。
鉴于以上所述,本发明的方位控制功能可以在不需要运动控制器的功能和所提供的腿式运动的具体形式的具体知识的情况下实现,并且应当理解,可以使用任何合适的已知的运动控制技术。因此,假设合适的传统技术对本领域技术人员来说是容易获得的,这里将不再提供对运动控制器和可以实施的腿式运动的具体步态的进一步讨论。
通常,机器人100的腿式运动可能涉及多种不同的腿姿势,包括一些不稳定的腿姿势,其中偏置力矩是围绕主体的俯仰轴线和侧倾轴线中的至少一个轴线引起的。应当理解,这些偏置力矩通常是由于机器人100的重心和由与表面接触的任何腿121、122限定的支撑中心之间的偏移而引起的。
因此,在图1A到1D中描绘的机器人100的双腿实施例中,不稳定的腿姿势可以包括单腿姿势,其中腿121、122中的一条从表面抬起。由于该实施例具有横向间隔开的腿121、122,将腿121、122中的一条抬高到单腿支撑姿势(例如图4B中所示的腿姿势)将导致机器人100的重心在从保持与表面接触的另一条腿122限定的支撑中心横向偏移。结果,偏置力矩将围绕主体110的侧倾轴线产生,使得机器人100将趋向于朝向抬高的腿121下落。此外,如果抬高的腿121也向前移动以引起机器人100的运动,这也将导致机器人100的重心从保持与表面接触的另一条腿122限定的支撑中心纵向偏移。结果,还将围绕主体110的俯仰轴线产生偏置力矩,使得机器人100也将趋向于抬高的腿的运动方向向前倾倒。
使用上述方位控制系统,通过与表面接触的任何腿121、122施加到主体110的偏置力矩可以被视为干扰并被补偿,同时稳定机器人100的取向。特别地,可以产生陀螺反作用扭矩以至少部分地抵消步伐中的任何感应偏置力矩。
如上所述,机器人100可以使用由两轴万向节组支撑的CMG140。每个万向节142、143可以负责产生各自的陀螺反作用扭矩,其可以用于控制机器人100的方向,其中,扭矩方向与万向节提供的施加旋转速度相移90度。使用两轴万向节组,CMG将在±90度处锁定万向节,此时系统饱和,无法存储进一步的动量。由于万向节轴线与所需扭矩施加方向对齐的奇异性,在所有条件下,需要多个CMG产生任意扭矩。
上述万向节锁定现象可以通过图9A和9B进一步理解,其示出了陀螺稳定腿式机器人100的示例的示意图,其中控制力矩陀螺仪140的转子自旋轴线Gz位于不同的方向。在图9A和9B中,机器人100处于不稳定的单腿支撑姿势,其中一条腿121被抬起并且支撑中心由另一条腿122限定。应当理解,如上所述,在该支撑姿势下将围绕主体110的侧倾轴线引起偏置力矩。
在图9A中,转子自旋轴线Gz处于垂直方向,使得施加如图所示(例如通过万向节142的旋转)的旋转速度ω
然而,当转子自旋轴线Gz通过施加旋转速度ω
图9B示出了当转子自旋轴线相对于图9A的垂直方向倾斜90°时的万向节锁定情形,其中不再有陀螺反作用扭矩τ绕侧倾轴线的任何分量减小。在这种情况下,所产生的扭矩τ垂直于所需的控制方向,并且无法抵消在这种单腿支撑姿势下围绕侧倾轴线产生的偏置力矩。如果达到该条件,则控制力矩陀螺仪140在机器人100的腿式运动期间不能再提供在侧倾轴线上的有效稳定。
然而,在如本文所述的腿式机器人的上下文中,这不被视为障碍。步行等腿部运动是一个循环过程,其中支撑点反作用力在重心的前后左右交替。施加的扰乱机器人取向的偏置力矩将在多个步伐中平均为零。因此,方位控制系统的CMG140不需要无限的动量传递,而是需要足够的能力在交替之前的每个步伐期间保持方位稳定性。作为动量存储,在一个步伐期间将陀螺仪转子141倾斜到一个极限提供了更大的范围以在随后的交替步伐中补偿动量。在每个步伐中,系统不需要全局稳定:相反,它只需要在给定的步伐周期内保持在CMG的饱和限制范围内。
在一些示例中,陀螺仪控制器220可以被配置为获得当前腿姿势的指示,并且根据当前腿姿势控制倾斜机构230的操作。应当理解,这样的布置不需要腿运动控制和方位控制功能之间的联接,而仅需要将腿姿势信息提供给陀螺仪控制器220。这种腿姿势信息可以简单地采用数字指示符的形式指示当前腿姿势。例如,在如图所示的双足机器人100中,右腿支撑姿势可以表示为“-1”,双腿支撑姿势可以表示为“0”,而左腿支撑姿势可以表示为“1”。
在任何情况下,关于在不同腿姿势期间可能预期的特定偏置力矩,陀螺仪控制器220可以通过腿姿势信息以考虑更准确的方位控制。
例如,在一些示例中,陀螺仪控制器220可以进一步被配置为基于当前腿姿势确定估计的偏置力矩,并且至少部分地基于估计的偏置力矩控制倾斜机构230的操作,从而产生陀螺反作用扭矩以至少部分抵消估计的偏置力矩。应当理解,这可以促进更灵敏的方位控制。陀螺仪控制器220不仅可以对由于机器人因偏置力矩而开始下降而导致的方位变化做出反应,还可以在检测到方位变化之前使陀螺反作用扭矩产生。
在一些示例中,陀螺仪控制器220可以附加地或替代地被配置以确定机器人100处于稳定的腿姿势,并且当机器人100处于稳定的腿姿势时,控制倾斜机构230的操作使转子自旋轴线旋转到预定的转子自旋轴线方向。例如,这可用于在转子自旋轴线之前旋转后将转子自旋轴线恢复到法向方向(例如图中所示的垂直方向),以当机器人100处于不稳定的腿姿势时产生陀螺反作用扭矩来抵消偏置力矩。
应当理解,在一个步伐的过程中,当其中一条腿被移动时,转子141可能会由于转子自旋轴线通过倾斜机构230的旋转而倾斜相当大的角度,以产生抵消偏置力矩所需的陀螺反作用扭矩。然而,当机器人100处于稳定的腿姿势时,转子自旋轴线可能会倾斜回其法向方向,并且由于该运动产生的任何陀螺反作用扭矩都可以通过与表面接触的腿121、122提供的稳定支撑点作出反应。
该功能可以被扩展为CMG140在机器人100的腿式运动中为即将到来的腿姿势做准备。例如,陀螺仪控制器220可以进一步配置为获得机器人100的腿式移动中的下一腿姿势的指示,并且当机器人100处于稳定的腿姿势时,控制倾斜机构230的操作以基于下一腿姿势使转子自旋轴线旋转到预定的转子自旋轴线方向。例如,转子自旋轴线可以预先旋转到一个相反的方向,以产生陀螺反作用扭矩以抵消下一腿姿势中估计的偏置力矩所需的旋转。这可以允许更大范围的可用旋转以在机器人100实际移动通过下一个腿姿势时产生所需的陀螺反作用扭矩。
如上所述,与CMG140饱和和万向节锁定相关的问题可以通过在每个步伐期间循环倾斜陀螺仪转子141来至少部分地减轻。图10A和10B中示出了这种行为的例子,现在将更详细地描述。
在图10A中,机器人100处于第一腿姿势,其中机器人100由一条腿121支撑并且另一条腿122被抬起,这引起倾向于使机器人100朝向抬起的腿122倾斜的偏置力矩。在这种情况下,转子自旋轴线Gz向前倾斜,从而抵消偏置力矩。
另一方面,在图10B中,机器人100处于第二腿,其中机器人100由腿122支撑并且腿121被抬起,这在与在图10A中腿姿势相反的方向上引起偏置力矩。因此,转子自旋轴线Gz向后倾斜以抵消偏置力矩。
应当理解,当机器人100在这些相对的腿姿势之间行走和循环时,陀螺仪转子141将周期性地向前和向后倾斜以产生所需的反作用扭矩从而抵消感应的偏置力矩。换句话说,在机器人100的行走运动期间,偏置力矩方向会左右交换,陀螺仪转子141可以相应地前后倾斜,而不会达到上述的万向节锁定状态。
此外,应当理解,在一个步伐中陀螺仪转子141的倾斜可以有效地预加载陀螺仪转子141,为下一步伐做准备,通过增加在相反方向上可用的运动角度范围来产生反作用扭矩以抵消下一步伐中的相反偏置力矩。
然而,应当注意,如果长时间保持不稳定的腿姿势,使得转子自旋轴线Gz从垂直方向倾斜90°并且陀螺仪饱和,则仍可能遇到万向节锁定。换句话说,仅使用陀螺仪稳定无法无限期地保持腿抬高的姿势。这可以通过选择机器人100的步态以确保在预定时间段内在相对不稳定的腿姿势之间循环来减轻。
即使使用上述技术来避免腿式运动期间的万向节锁定,控制力矩陀螺仪的有限范围意味着累积误差不能被无限期地拒绝。即使是很小的不平衡也会开始累积,例如关节的束缚/摩擦、机器人的重量不平衡、外在的颠簸和干扰。因此,陀螺仪可能会随着时间的推移向饱和方向漂移。然而,可以利用其他力量来校正这些类型的累积误差,如下例所示。
例如,图11A示出了横向陀螺仪偏置已经累积到转子自旋轴线Gz在横向上倾斜到几乎90°的阶段的场景。应当理解,横向陀螺仪的进一步偏置将导致万向节锁定并且使得控制力矩陀螺仪140不能抵消绕俯仰轴线引起的进一步偏置力矩。
然而,图11B图示了用于校正图11A的横向陀螺仪偏置的策略,其包括有意地倾斜机器人100的主体110。在这种情况下,机器人的重心相对于由腿121、122提供的支撑基部纵向重新定位,其中通过使主体110相对于腿121、122枢转来提供该支撑基部。这有意地在一个方向引起俯仰偏置力矩τ
在另一个示例中,图12A示出了纵向陀螺仪偏置已经累积到转子自旋轴线在纵向上倾斜到几乎90°的阶段的场景。在这种情况下,纵向陀螺仪进一步的偏置将导致万向节锁定并使得控制力矩陀螺仪140不能抵消绕侧倾轴线引起的进一步偏置力矩。
图12B图示了用于校正图12A的纵向陀螺仪偏置的策略,通过使用双支撑姿势将控制力矩陀螺仪140“卸载”为由机器人100的腿121、122提供的两个地面反作用力中。当腿121、122都与地面接触时,转子自旋轴线Gz可以在减小转子自旋轴线Gz的倾斜角的方向上以旋转速度ω
应当理解,使用地面反作用力来校正陀螺仪偏置的这种原理可以应用于不同的姿势(即,除了双腿并排站立姿势)以允许不同的陀螺仪去偏置校正。
例如,图13A示出了机器人100在起伏的地面上处于特定的双支撑姿势的示例。机器人100分别在地面接触点A和B处由腿121、122支撑,但点B相对于点A升高,因此通过将点B垂直投影到与点A相交的水平地面上来定义点C。在这种双支撑姿势期间通过脚的地面反作用力允许转子自旋轴线Gz围绕平行于连接点A和C(即投影到水平地面上的地面接触点)的线的轴线旋转,而不会引起机器人100的运动。因此,陀螺仪去偏置可以在任何双支撑姿势下的特定去偏置轴线上执行。
转向图13B,其显示了机器人行走时出现的不同双支撑姿势和相应的陀螺仪去偏置轴线,应当理解,在机器人行走时交替腿姿势允许去偏置轴线在行走过程中完全跨越控制力矩陀螺仪万向节的2个自由度空间。
上面讨论的用于校正陀螺仪偏置的不同技术(即通过倾斜主体或使用双支撑姿势用于反作用力去偏置)可以在静止站立和主动跨步期间结合在一起。应该注意的是,在静止站立期间反作用力去偏置是不够的,因为它无法补偿与双支撑姿势正交的转子自旋轴线倾斜。还应该注意的是,通过反作用力去偏置所能施加的扭矩大小受限于机器人重量对踝关节偏移的力矩。
在一些实施例中,陀螺仪控制器220可以包括不同的控制子系统,这些子系统适于根据不同的输入或控制方法贡献不同的控制输出部件,如实现期望的稳定性控制性能所需要的。因此,可以使用来自不同子系统的控制输出部件的组合来控制倾斜机构230。
例如,陀螺仪控制器220可以包括方位稳定性子系统,用于基于检测到的主体110关于俯仰轴线和侧倾轴线的角方位来产生陀螺反作用扭矩以稳定主体110的方位。应当理解,这可以采用检测到的方位的负反馈控制,使得该子系统的控制输出分量可以基于检测到的方位和期望的方位之间的偏差,例如具有零俯仰和零侧倾的水平方位。
虽然在某些情况下,单独的这种控制水平可以允许足够的稳定性控制,但是可以实施附加的控制子系统以增强性能和/或提供额外的有用功能。
例如,陀螺仪控制器220可以可选地包括偏置补偿子系统,用于产生陀螺反作用扭矩以补偿基于腿姿势的估计偏置力矩。这能够允许特定腿姿势的估计偏置力矩被陀螺反作用扭矩直接抵消,而不是必须对由偏置力矩导致的实际方位变化做出反应。应当理解,这能够允许更灵敏的稳定性控制。这可能涉及正前馈控制方法,如将在适当时候进一步描述的。
附加地或替代地,陀螺仪控制器220可以包括松弛控制子系统,其可以根据腿姿势提供进一步的控制功能。例如,当机器人100处于稳定的腿姿势时,松弛控制子系统可以使转子自旋轴线返回到法向方位,从而“松弛”转子自旋轴线的任何先前施加的旋转。另一方面,当机器人处于不稳定的腿姿势时,松弛控制子系统可能会导致产生陀螺反作用扭矩,从而使主体呈现不再引起偏置力矩的方位。在任何一种情况下,这些功能都可以涉及使用正反馈控制,这可能会导致陀螺仪轴线的旋转速度与转子自旋轴线与法向方向相比的偏差成比例地增加。这方面的进一步实施细节也将在适当的时候描述。
陀螺仪控制器220可以与机器人的处理设备一体地提供,用于提供运动控制器功能和其他可选功能,例如导航。可替代地,陀螺仪控制器220可以使用能够完全独立于运动控制器操作的单独的处理设备来提供。
现在将描述机器人100的优选实施例的进一步特征。
在一些实施例中,倾斜机构230被配置为相对于转子自旋轴线的法相垂直方位旋转转子自旋轴线。因此,当转子141没有被万向节142、143倾斜时,转子141通常可以呈现水平取向。
在一些示例中,自旋轴线和相应的陀螺仪轴线可以相互正交。例如,在CMG140的双万向节实施方式中,两个万向节142、143可以包括被配置为围绕万向节俯仰轴线旋转转子自旋轴线的第一万向节142和被配置为围绕万向节侧倾轴线旋转转子自旋轴线的第二万向节143。然而,这不是必需的,并且在可替代的示例中,可以提供非正交的陀螺仪轴线,提供的这些轴线不共线。
通常,CMG140的两轴万向节组将包括枢转地联接到转子141的内部万向节和枢转地联接到内部万向节并安装在机器人100上的外部万向节。因此,外部万向节能够围绕外部万向节轴线旋转内部万向节,并且内部万向节可以围绕内部万向节轴线旋转转子。需要说明的是,在图1A至图1D所示的机器人100的实施例中,内部万向节为用于使转子自旋轴线绕万向节俯仰轴线旋转的第一万向节142,而外部万向节为用于使转子自旋轴线绕万向节侧倾轴线旋转的第二万向节143。然而,该特定布置不是必需的,可以颠倒。
在一些实施例中,转子141可以被配置为在使用中以固定的转子速度旋转,使得陀螺反作用扭矩可以通过控制转子自旋轴线绕各自的陀螺轴线的旋转速度来单独确定。然而,可以使用可变转子速度以允许更精确地控制陀螺反作用扭矩。还应当理解,这可以允许额外的自由度以管理CMG的饱和度。
腿121、122可以具有大体常规的构造,尽管图1A至1D中所示的机器人100的实施例的腿121、122包括一些现在将突出显示的特别有利的特征。
在该示例中,每条腿121、122包括具有各自的髋部致动器131、132和膝部致动器133、134的髋部和膝部枢轴。腿式运动因此可以由髋部和膝部致动器的旋转位置限定。在每条腿中,大腿123在髋部和膝部枢轴之间延伸并且小腿124从膝部枢轴向下延伸。
每条腿121、122还可以包括通过踝关节联接到腿的足部125(如图1D的详细视图所示),足部125包括用于提供与表面的销接触的两轴万向节枢轴136、137。如上所述,当使用CMG140控制稳定性时,这种简单的销接触布置可以允许有效的腿式运动,而不需要像其他常规稳定性技术那样复杂的踝关节致动。尽管如此,在机器人100的优选实施方式中,每个踝关节仍可包括足部旋后致动器135,其被配置为在表面平面中向足部125施加转动力矩。这能够允许机器人100通过简单地在单脚上枢转而转动。然而,应注意,可替代地,类似的转动能力可通过提供髋部旋后致动器来提供。
尽管图1A到1D中所示的机器人100的实施例使用了特定的腿配置,包括特定的致动器布置(即髋部、膝部和足部旋后致动器),但是应当理解,在允许类似功能的同时,一系列不同的腿配置可以实现。
不同的腿构造,相对于髋部和膝部致动器以及两轴踝关节枢轴,可由用于相对于主体扭转足部的旋后致动器的相对位置来限定。需要注意的是,踝关节枢轴的顺序并不重要,例如上面提到的两轴万向节枢轴可以用等速万向节或交叉轴线代替。
现在将针对图14A至14D中所示的示意图描述许多不同的腿构造。
图14A表示如上所述的当前腿构造,其中旋后致动器以定位在踝关节枢轴下方的足部旋后致动器的形式提供。需要注意的是,此版本易于构建,但在高度倾斜的地面上可能会出现问题,在这种情况下,机器人重量可能会对旋后致动器施加高扭矩。
图14B示出了另一种腿构造,其中旋后致动器位于髋部致动器上方。尽管从动力学的角度来看,这种布置是理想的,但构建髋部机构可能很复杂。
图14C显示了另一种可能的可替代的腿构造,其中旋后致动器与小腿在一条直线上,即在膝部和踝关节枢轴之间。这种布置可以在动力行为和构造复杂性方面提供前两个示例之间的折衷,但是会导致踝关节中不期望的交叉耦合。
最后,图14D显示的腿构造中,旋后致动器与大腿成一直线,即在髋部和膝部之间。然而,这种布置在实践中不起作用。
在优选实施例中,每个踝关节还可以包括用于选择性地防止踝关节关节的两轴万向节枢轴136、137旋转的制动系统,否则它们将自由旋转。如果需要,例如当机器人断电并且没有主动稳定时,这可以让踝关节锁定在一个稳定的位置。
腿121、122可以被配置为允许机器人100在髋部致动器131、132和膝部致动器133、134被停用时稳定的蹲伏位置和站立位置之间转换。在一些示例中,腿121、122可以被配置为使得髋部和踝关节枢轴能够在蹲伏和站立位置之间的转换过程中保持竖直对齐。
现在将描述机器人100实施例的进一步构造细节。这些构造细节具体涉及如图7A和7B所示的机器人100的小规模实验原型,尽管应注意这包括如图1A至1D所示的类似特征,并且以下描述将参考这些图中的附图标记。
机器人100主要由铣削6061铝构成,并由其陀螺仪转子141、致动万向节142、143、大腿123和小腿124、踝关节万向节136、137和足部125以及电子元件组成(图1A到1D中未示出——但在图7A和7B的照片中可见)。
机器人100围绕其CMG140及其转子141构建,其进一步的特征在图1C中示出。陀螺仪转子141由316不锈钢车削而成,以最大限度地提高可实现的旋转速度并确保离轴扭转强度。在机器人的测试配置中,转子141的转动惯量I
为保护用户,陀螺仪转子141被护罩161包围,护罩161由1.65毫米厚的低碳钢(ASTMA513)带提供,在由至少3毫米厚的6061铝制成的外壳160内部。如果旋转转子141的故障产生高速碎片,这些共同提供抗渗透和抗剥落保护。转子141在SKF 618-7干运转轴承162上运行额定转速>50,000RPM。轴承162被保持在可调轴承座中以允许保持压力和轴向载荷力的变化。陀螺仪转子141的旋转由Tiger Motor MT-1306无刷直流电机163提供动力。
如上所述,在该实施例中,CMG140包括具有一组两个万向节142、143的倾斜机构230。该万向节组由两个同心台组成,每个台由各自的万向节致动器152、153提供动力,其形式为两个MKS HBL575SL低轮廓伺服。根据制造商的数据表,每个HBL575SL提供1.65Nm的扭矩,在7.4V时的最大速度为14.96rads
伺服系统的低轮廓结构减少了万向节组的横向和纵向轮廓,这是一个限制性设计因素。结构的机械限制阻止横向万向节台移动超过30度。由于纵向具有较低的偏置力(围绕俯仰轴线),可通过步长进行控制,因此较低的横向万向节范围不会成为问题。
主体采用极简设计,将横向万向节伺服系统结合到其结构中。简单的髋板将主体联接到髋部伺服系统;髋部和膝部伺服系统也是HBL575SL。98毫米长的大腿和73毫米长的小腿被铣削,下叉结构将小腿联接到踝关节(见图1D)。腿的构造使得在休息站姿和蹲伏、无动力站姿时,髋部和踝关节在重心的正下方对齐。穿过小腿和大腿的孔允许将电线和设备安装到它们上面。
踝关节是带有四个683-2Z滚动轴承的两轴万向节枢轴,以承载机器人的重量,而不会将力矩传递到足部(见图2d);以这种方式,接地触点近似于两个自由度的销触点。足部是使用Formlabs Form 2透明树脂3D打印的SLA(立体光刻)。踝关节中的伺服驱动足部旋后;通过在每个姿势周期中进行旋后运动,机器人能够通过向地面施加力矩来影响转弯。踝关节间距为22.5毫米,保持尽可能短,以最大限度地减少单腿姿势期间的横向重心偏置力矩的大小。
机器人的实验原型总共重1.3公斤,从脚底到主体顶部的尺寸为240毫米。其总成本约为4240澳元。
为了进行测试,机器人包括基于Atmel ATmegaX32D4-AU的原型电路板,使用Adafruit IMU模块和Bosch BNO-0559轴线MEMS传感器在融合模式下进行方向感测。方向控制回路由传感器的100Hz融合输出驱动。电路板安装在后万向节伺服系统的背面,传感器模块刚性固定在万向节框架的底部。该电路板从可提供6.4A和8.4V的稳压台式实验室电源接收板载电源。
在进一步的开发中,可以设想机器人可以使用基于ST STM32L082K微控制器的PCB,安装在万向节中心正下方的髋部伺服系统之间。此版本可以是电池供电的,其中一对平行的2芯1300mAh锂聚合物电池组安装在大腿上部,靠近髋部,以降低重心并减少惯性耦合。
现在将概述用于在如上所述的双足机器人实施例中使用的方位控制系统200的实际实施方式进一步的细节。
机器人的控制原理表面上类似于直升机机器人的控制原理,因为它主要涉及通过施加到其旋翼的运动来调节主体方位。如果保持正确的姿势,则可以独立应用垂直高度和运动。
为了帮助理解控制技术,首先将关于图4A中指示的参考轴线和图4B中机器人的自由体图来讨论机器人的动力学。
机器人的动力学模型基于简单的倒立摆罗盘步态构型,假设地面有反作用力但没有反作用扭矩(见图4B):
其中,I是躯干的转动惯量,τ是施加的陀螺反作用扭矩,φ是θ主体侧倾角和俯仰角,v是w站立腿施加到主体的纵向和横向反作用扭矩作为髋部和膝部角度q
假设腿的质量可以忽略不计,机器人腿的简化力学允许横向力矩(即关于主体侧倾轴线的偏置力矩)减少到:
w=w'(ecosφ-(l
其中,e是踝关节外展枢轴与重心的横向偏移,l
纵向力矩(即关于主体俯仰轴线的偏置力矩)由站立腿的向前运动学给出:
v=(l
站立腿之间的切换引起作用在躯干上的施加力矩的不连续性,因为w改变符号,并且随着q
不稳定腿支撑中的单腿支撑姿势并施加恒定偏置力矩,该偏置力矩必须由CMG产生的陀螺反作用扭矩抵消。如果保持足够长的时间,CMG最终会饱和,并且无法再抵消偏置力矩。因此,机器人不能无限期地保持单腿支撑姿势,必须在单腿支撑之间切换以保持w和v的平均值为零。因此,受上述陀螺稳定性控制的双足机器人必然是动态步行机器。在每一步结束时,陀螺仪转子将在补偿偏置力矩的同时倾斜到其范围的一端,但应理解,这允许增加的范围向后倾斜以补偿下一相反的偏置力矩。如前所述,从开始的双支撑姿势开始,陀螺仪可能会在迈出第一步时预先平铺。
在双腿支撑阶段,双足机器人将具有单个稳定轴线,它不能沿着该稳定轴线跌倒。这为控制器提供了机会以在陀螺仪转子自旋轴线方向“卸载”累积漂移,从而确保陀螺仪转子的平均位置处于中心位置,以保持其动态范围。
现在将讨论方位控制系统的进一步实施特征,特别是关于图5中所示的示例控制架构。
如上所述,控制任务不是实现全局稳定性,而是在单个支撑阶段的时间段内局部地保持方位。正常的步循环预计需要1到2秒才能完成,中止的步(例如,如果检测到悬崖或障碍物)最多需要4秒。对于零运动,这将需要0.117kgms
关于图5,所提出的控制系统设计包括三个子系统:提供局部比例微分(PD)方位控制的方位稳定性子系统510、前馈偏置补偿子系统520和“松弛”控制子系统530。由于CMG的陀螺反作用扭矩输出与施加的旋转速度成正比,并且万向节伺服系统由角度命令驱动,因此控制架构采用包含积分器的偏移动态顺序构建。控制回路包括方位动力学模型501,并且可选地包括输入的步态/腿姿势信息502。
为了避免在方位稳定性子系统510的PD控制导数路径中对来自噪声速度信号的积分误差,角度测量直接用于D增益,并且P增益使用积分角度和。
当处于单腿姿势时,偏置补偿子系统520的前馈控制基于步态/腿姿势501从正向运动学提供估计的偏置力矩。这有助于减少PD中的跟踪误差控制,但不需要在更高的陀螺仪转子旋转速度下保持稳定性。
松弛控制子系统530是控制回路中的正反馈项。它的功能有两个方面:首先,当转子自旋轴线的方向角偏离零时,它通过加快CMG的控制动作来提供额外的稳定性输入,其次,它提供了一种在双支承姿态下将转子旋转轴的方向角返回到零的方法。作为额外的效果,在更长的步数中,它还会导致双足机器人在其踝关节上倾斜,直到重心在其上方对齐,从而抵消偏置力矩-这种行为类似于致动静态稳定性重心移位。通过这种方式,除了可选的前馈偏置补偿项之外,不需要了解多种战略步行行为的运动知识。
来自三个子系统510、520、530的控制输出的总和在504处转换到速度空间,并在503、505处经受饱和限制。
方位控制系统在Matlab Simulink中使用100Hz混合离散-连续模型进行仿真。横向(即侧倾控制)和纵向(即俯仰控制)模型都可以通过改变施加的偏置载荷的结构来模拟。作为第一步,我们使用横向动力学来显示设计的正确操作(见图6)。仿真表明,对于实际的增益参数,机器人的主体侧倾方向角可以保持在±7度以内(短步)和±10度(长达4秒的步)。如上所述,控制参数为:P=22:5,D=0:175,松弛=7:5,前馈由腿姿势指示器给出。
图7A和7B中所示机器人的实验实施例已经过测试以验证其方位控制系统的基本操作,特别是确认它可以在双脚并拢的双支撑腿姿势期间保持直立。此姿势是双足运动的起点,对于执行任务很重要。如上所述,在这方面的动力学相当于倒立摆。在这种姿势下,w和v都为零,因此系统应该围绕陀螺仪零侧倾角维持平衡。
对于该测试,机器人被悬挂在三脚架支架上作为安全绳,被安全网包围。机器人由电源脐带缆、UART线和伺服驱动器联接,以便于手动调整足部的方向;这些本身都被悬挂起来,以避免给机器人带来负担。由于控制板在机器人后部增加了重量,因此在机器人前部放置了一个电池模块作为配重。机器人有一个净前重重心;它被手动调整以移动目标重心-7.75度。除了前馈设置为零外,控制参数与上述模拟相同。
在测试过程中,机器人被命令将其四肢移动到它们的相对位置以将双脚并拢站立,从而使悬挂线松弛。当CMG被激活并且陀螺仪转子加速时,机器人被实验者保持垂直。一旦转子达到速度,就释放机器人并记录由此产生的运动。发现机器人平衡得很好,其指令方向的强烈断言可以在图8的图中看到。随着时间的推移,陀螺仪侧倾角有轻微的漂移(注意陀螺仪侧倾轴线中转子自旋轴线的旋转大约对应于在主体俯仰轴线上产生的陀螺反作用扭矩),导致它最终在实验中饱和25秒。据信,漂移是由于脐带施加的未知机械应力的结果。
这种小的、未补偿的偏置漂移增加了这样的可能性:单独的CMG可能不足以拒绝在双脚并拢的双腿姿势时某些类型的持续俯仰干扰。对于俯仰动态,可以通过引入应用于髋部角度和俯仰参考角度的调整值来进行额外的平衡校正。这与其他双足上的平衡臂具有相同的效果,但额外成本为零。这种方法不会增加复杂性,然而不能用于机器人的侧倾稳定。在无绳行走中是否会出现同样的偏置还有待测试。将陀螺仪速度提高到23,000RPM也将在饱和之前提供更大的动量传递,进一步调整松弛控制器也可能有助于解决这个问题。
应当理解,基于CMG的方位控制系统对用于稳定非常简单、低成本的腿式机器人是一种有前途的方法。取向所需的控制设计必须考虑每周期不稳定性和饱和限制的独特设计挑战。首选的控制架构将预期腿姿势偏置力矩的前馈补偿与PD方向控制器和“松弛”控制器相结合,该控制器补偿偏移偏置并使陀螺仪转子返回到法向中心位置。测试已经验证了,机器人的1.3公斤亚尺度实验实施例的简单双脚并拢双支撑姿势稳定,其配备了13,000RPM转子。
总的来说,腿式机器人,例如双足机器人,可以通过使用控制力矩陀螺仪(CMG)来控制机器人在行走和从腿姿势转换到腿姿势时的取向,从而实现陀螺仪稳定,具有的优势是消除静态稳定步行的缓慢或拖曳步态,或者在动态步行技术中需要复杂的控制或高性能致动器,例如零力矩点、反作用力控制和其他依赖于脚和地面的稳定性。
该技术使用CMG作为角动量传递的储存器来工作。当机器人抬起一条腿走路时,站立腿的脚和重心(CoG)之间的偏移会产生一个偏置力矩,导致机器人摔倒。控制CMG以产生与跌倒方向对抗的反扭矩,从而使CMG施加在机器人底盘上的反作用扭矩保持其方向。
通过在两个轴线(俯仰和侧倾)上控制CMG,例如通过使用两轴万向节布置,机器人的纵向和横向倾斜(即俯仰和侧倾)可以保持接近水平(或在一些其他所需的角度)。
与传统的稳定性控制技术相比,上述技术可以有利地进行比较,例如将脚的支撑多边形始终保持在重心下方的静态步行,以及依赖于精确控制腿部轨迹的动态步行,以当机器人过渡到其步行/跑步阶段时,改变重心。在这些情况下,机器人的取向受制于重心和腿轨迹的稳定性要求。
相比之下,在上述技术中,机器人的方位及其行走稳定性可以局部独立于腿部运动。因此,腿部定位和扭矩产生不需要精确并且可以使用更便宜、性能更低的伺服致动器。类似地,单独行走所需的方位感测质量可能限于躯干方位保持的期望精度的质量。通过这种方式,更经济的腿式机器人成为可能,而不必牺牲机器人的有效能力。通过正确的构造,这样的机器人,仅使用基本的近端障碍物和悬崖检测,仍然能够穿越破碎的、倾斜的或不平坦的地形、分层/楼梯、光滑的表面和有纹理的表面。
应当理解,上述机器人的实施例使用包括倾斜机构的单个控制力矩陀螺仪,该倾斜机构被配置为围绕两个陀螺仪旋转轴线旋转转子自旋轴线以产生相应的陀螺反作用扭矩。然而,已经设想了机器人的替代实施例,其可以利用两个或更多个控制力矩陀螺仪来提供与上述类似的功能。
例如,机器人可大体如先前示例中描述的那样配置,但可包括两个控制力矩陀螺仪,每个控制力矩陀螺仪包括在使用中围绕转子自旋轴线旋转的转子,以及用于支撑与机器人相关的转子的倾斜机构。每个控制力矩陀螺仪的倾斜机构可以被配置为围绕相应的陀螺仪旋转轴线旋转转子自旋轴线,从而产生相应的陀螺反作用扭矩。与上述类似的方式,陀螺仪控制器可以被配置为至少部分地基于检测到的主体的角方位来控制两个控制力矩陀螺仪的倾斜机构的操作,从而产生陀螺反作用扭矩以在机器人的腿式运动期间至少部分地稳定主体的角方位。
在一些实施方式中,第一控制力矩陀螺仪可以被配置为产生第一陀螺反作用扭矩以至少部分地稳定主体关于俯仰轴线的角方位,以及第二控制力矩陀螺仪被配置为产生第二陀螺反作用扭矩以至少部分地稳定主体围绕侧倾轴线的角方位。这可以通过为每个控制力矩陀螺仪提供单轴万向节来实现,该单轴万向节被配置为围绕正交轴线旋转以分别在俯仰轴线和侧倾轴线上提供陀螺反作用扭矩。
换句话说,可以使用具有各自的单轴倾斜机构的两个控制力矩陀螺仪来有效地替代具有双轴倾斜机构的单个控制力矩陀螺仪。在任何一种情况下,陀螺仪控制器都可以控制一个或多个倾斜机构(例如万向节致动器)的操作,以产生陀螺反作用扭矩,用于在机器人运动期间稳定机器人主体的角方位。
应当理解,与使用单个控制力矩陀螺仪的先前描述的实施例相比,使用两个控制力矩陀螺仪的这种布置将涉及折衷。最重要的是,使用两个控制力矩陀螺仪本质上将复制控制力矩陀螺仪硬件,从而对机器人的成本、尺寸和重量产生重大影响。尽管如此,它可以允许实施不太复杂的控制策略,因为可以使用更简单的单轴万向节提供每个控制力矩陀螺仪,从而避免两个陀螺仪旋转轴线之间的交叉耦合,如在前面描述的使用带有两轴万向节装置的单控制力矩陀螺仪实施例。
其他示例可以涉及使用多个控制力矩陀螺仪,每个控制力矩陀螺仪都具有两轴线倾斜机构。尽管这可能会导致一些冗余,但这可能有助于缓解上述有关累积陀螺仪偏置(例如万向节锁定)的问题,因为即使这发生在一个陀螺仪中,另一个陀螺仪也可能保持不偏置。然而,这种安排将再次涉及复制控制力矩陀螺仪硬件的缺点,但在不太复杂的控制策略方面没有同样的好处。
虽然使用多个控制力矩陀螺仪来提供低成本陀螺稳定机器人与使用如前面示例中讨论的单个控制力矩陀螺仪相比可能不太优选,但可能存在其他应用,其中这可能是可接受的布置。在任何情况下,应当理解,与以上针对使用单个控制力矩陀螺仪的实施例描述的相同的功能和优选实施特征中的许多也可以应用于涉及多个控制力矩陀螺仪的实施例。
在本说明书和随后的权利要求书中,除非上下文另有要求,否则词语“包括”和诸如“包括”或“包括”的变体将被理解为暗示包括规定的整数或整数组或步骤,但不排除任何其他整数或整数组。如本文所用且除非另有说明,术语“大约”是指±20%。
必须注意的是,如在说明书和所附权利要求书中使用的,单数形式“一个”、“一种”和“所述”包括复数形式,除非上下文另有明确规定。因此,例如,提及“支撑物”包括多个支撑物。在本说明书和随后的权利要求中,除非明显相反的意图,否则引用将被定义为具有以下含义的多个术语。
当然应当认识到,虽然以上已经通过本发明的说明性示例的方式给出,但是对于本领域技术人员显而易见的所有此类和其他修改和变化被认为落入在如本文所述的本发明的广泛范围内。
- 陀螺稳定腿式机器人
- 一种提高腿足式机器人触地稳定性的耦合仿生足垫