一种用于垃圾储坑中的防碰撞吊装机构
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及吊装技术领域,具体涉及一种用于垃圾储坑中的防碰撞吊装机构。
背景技术
城市生活垃圾在厂外由城市环卫系统负责收集,用密闭式垃圾压缩运输车运送入厂内。垃圾车经汽车衡自动称重并由计算机记录和存储数据后,通过高架引桥进入综合主厂房卸料平台,通过垃圾卸料门将垃圾卸入垃圾坑内储存。
垃圾储坑内的垃圾通过吊装机构进行堆料、倒垛和取料送至焚烧炉的垃圾料斗中。由于垃圾储坑中的各处垃圾高度不同,在吊装机构的抓斗平移过程中较易发生碰撞事故,且垃圾中也时常存有硬质物品,对吊装机构的伤害较高,因此,本领域技术人员需要一种能够实现防碰撞的吊装机构。
发明内容
本发明的目的是根据上述现有技术的不足之处,提供一种用于垃圾储坑中的防碰撞吊装机构,该防碰撞吊装机构通过在抓斗上设置水平向激光测距仪以及弹射气囊机构,从而防止在水平方向上发生碰撞事故,并通过在抓斗上设置竖向激光测距仪、压力检测装置以及电机,从而防止在竖直方向上发生碰撞时对抓斗造成刚性碰撞伤害。
本发明目的实现由以下技术方案完成:
一种用于垃圾储坑中的防碰撞吊装机构,其特征在于所述防碰撞吊装机构包括龙门架、运行于所述龙门架上的平移机构以及设置在所述平移机构下方的抓斗,所述平移机构下方设置有竖向轨道,所述抓斗可滑动式装配于所述竖向轨道上;所述抓斗上设置有水平向激光测距仪以及竖向激光测距仪,所述抓斗的外壁面上设置有指向至少四个方向的弹射气囊机构,所述水平向激光测距仪、所述竖向激光测距仪以及所述弹射气囊机构分别与中央控制器连接。
所述弹射气囊机构包括钢圆筒以及在所述钢圆筒中自内向外依次设置的压缩气罐、电磁阀、橡胶气囊、保护罩,所述电磁阀连接所述压缩气罐和所述橡胶气囊并控制所述压缩气罐的开闭,所述电磁阀由所述中央控制器连接控制,所述保护罩设置在所述钢圆筒的端部。
所述抓斗在水平横移中,当所述水平向激光测距仪监测到距离垃圾的堆垛达到设定阈值且没有收到停止指令或减速指令时,所述中央控制器根据所述水平向激光测距仪的监测数据控制所述弹射气囊机构中的所述电磁阀开启,从而使所述压缩气罐中的压缩气体充满所述橡胶气囊并冲破所述保护罩向外弹射,以避免所述抓斗与所述垃圾的堆垛发生水平向碰撞;弹开的所述保护罩与所述中央控制器实行联动控制,被弹开后所述保护罩向所述中央控制器发射停止运行指令,所以中央控制器控制所述平移机构停止移动。
所述抓斗通过由电机驱动的滚轮滑动式运行在所述竖向轨道上,所述抓斗的爪瓣最下端设置有压力检测装置,所述压力检测装置以及所述电机分别与所述中央控制器相连接。
所述抓斗在竖向移动中,当所述竖向激光测距仪检测到距离垃圾的堆垛高度为0且所述压力检测装置的压力达到设定阈值时,所述中央控制器控制所述电机停止驱动旋转,以使所述滚轮在所述竖向轨道上滑动以释放碰撞带来的竖向冲击力。
本发明的优点是:防碰撞吊装机构具备水平向和竖直方向上的测距功能,能够防止水平方向上的刚性碰撞,并通过结合压力检测装置能够防止竖直方向上的刚性碰撞。
附图说明
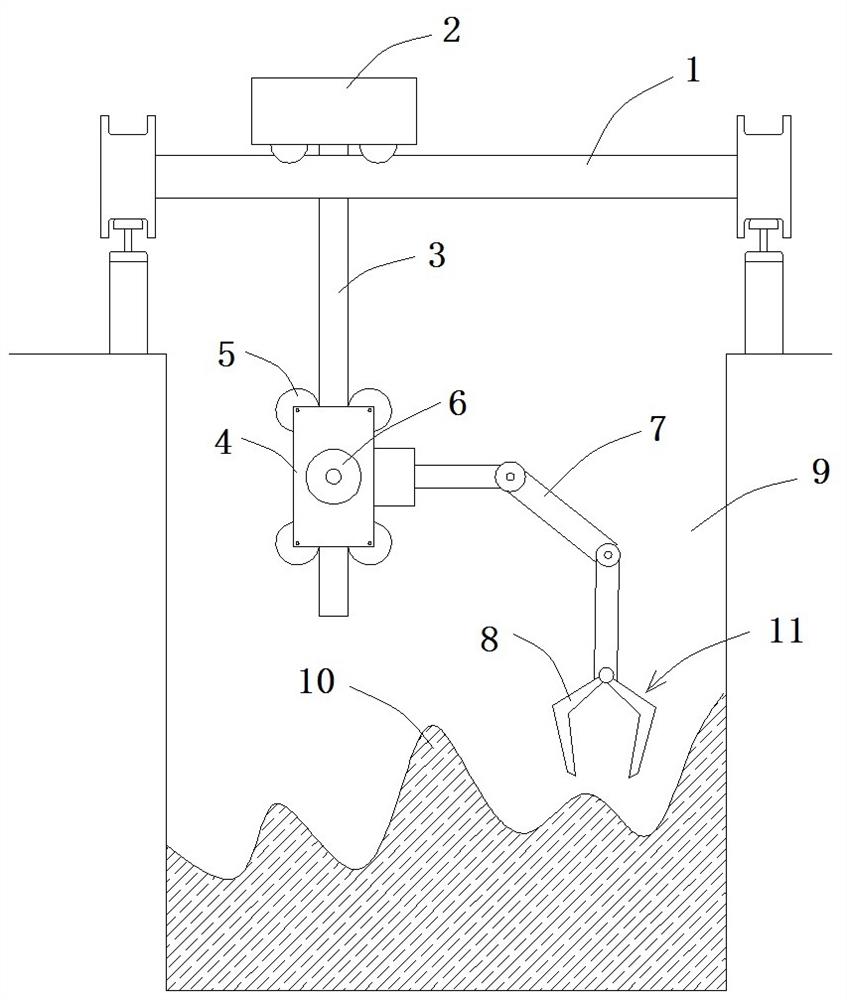
图1为本发明中防碰撞吊装机构在垃圾储坑中的工作示意图;
图2为本发明中防碰撞吊装机构的局部放大示意图;
图3为本发明中防碰撞吊装机构内橡胶气囊弹开的局部放大示意图。
具体实施方式
以下结合附图通过实施例对本发明的特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:
如图1-3,图中各标记分别为:龙门架1、平移机构2、竖向轨道3、竖向移动机构4、滚轮5、电机6、机械臂7、爪瓣8、垃圾储坑9、垃圾堆垛10、抓斗11、压缩气罐12、钢圆筒13、橡胶气囊14、保护罩15、电磁阀16、水平向激光测距仪17、竖向激光测距仪18、压力检测装置19。
实施例:如图1-3所示,本实施例具体涉及一种用于垃圾储坑中的防碰撞吊装机构,该防碰撞吊装机构包括龙门架1、运行于龙门架1上的平移机构2以及设置在平移机构2下方的抓斗11,龙门架1架设在垃圾储坑9的上方两侧并可沿垃圾储坑9的纵向移动走行,平移机构2为一滑行小车用以在龙门架1的横向轨道上实现水平向的横移,通过平移机构2和龙门架1的组合使用,可实现在垃圾储坑9上的平面移动走行。在此基础上,在平移机构2的下方还固定设置有一具有一定长度的竖向轨道3,抓斗11的多自由度机械臂7经竖向移动机构4可滑动式装配在竖向轨道3上,从而进一步实现抓斗11在竖直方向上的自由移动。
如图1-3所示,在抓斗11的外壁面上设置有若干个水平向激光测距仪17以及指向至少四个方向的弹射气囊机构,如果条件允许,可以将若干个水平向激光测距仪17改为360°环向检测的激光测距装置;弹射气囊机构的主体为钢圆筒13,钢圆筒13焊接固定在机械臂7的外壁面上(即抓斗11与机械臂17的连接位置处),钢圆筒13的内腔中自内向外依次设置有压缩气罐12、电磁阀16、橡胶气囊14以及保护罩15,电磁阀16用于将压缩气罐12与橡胶气囊14的连接,且电磁阀16由中央控制器连接控制,保护罩15以有限的强度连接设置在钢圆筒13的端口上,在外力作用下可快速从钢圆筒13的端部脱落。中央控制器实时接收水平向激光测距仪17所传送的测距数据,当抓斗11进行水平向移动并与垃圾堆垛10之间的水平间距达到设定阈值且没有收到停止指令或减速指令时,中央控制器向电磁阀16发送开启指令,从而开启电磁阀16以使压缩气罐12中的压缩气体迅速进入橡胶气囊14内并填充满,膨胀的橡胶气囊14向外挤压弹开保护罩15并进一步向外膨胀,从而使橡胶气囊14作为抓斗11与垃圾堆垛10之间的缓冲体,以避免抓斗11与垃圾堆垛10之间的刚性碰撞,且还需要说明的是,保护罩15与中央控制器具有联动控制关系,当保护罩15弹开时,平移机构2自动执行停止指令,实行锁止。
如图1-3所示,在抓斗11的下端面上还设置有指向下方的竖向激光测距仪18,且抓斗11的各爪瓣8的下端分别设置有压力检测装置19,即压力传感器用于检测抓斗11下降过程中是否碰到垃圾堆垛10且下压力数值有多大,需要说明的是,竖向激光测距仪和压力检测装置19均同中央控制器相连接;竖向移动机构4通过若干个滚轮5同竖向轨道3实现滑动配合,各滚轮5经齿轮传动由电机6驱动进行竖直方向上的上下移动,电机6具体由中央控制器连接控制。在抓斗11向下移动过程中,竖向激光测距仪18实时监测其同垃圾堆垛10的竖向间距,当竖向激光测距仪18检测到距离垃圾堆垛10的高度为0且压力检测装置19的压力达到设定阈值时,中央控制器立即控制电机6停止驱动旋转形成空档,使滚轮5在竖向轨道3上滑动以释放碰撞带来的竖向冲击力,避免电机6内电流过大造成发热甚至是烧坏的事故。
本实施例的有益效果在于:通过在水平方向上设置缓冲体防止碰撞,并通过在竖直方向上依据压力测值来控制电机是否继续运转,从而实现抓斗在垃圾储坑中的全方位防碰撞安全性。
- 一种用于垃圾储坑中的防碰撞吊装机构
- 一种用于防船舶碰撞的靠球吊装置