一种超声手术器械及其控制方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及医疗器械领域,特别涉及一种超声手术器械。
背景技术
超声切割止血刀是一种使用频率高的应用于外科胸腹部手术的医用器械,该器械兼分离、切割及止血于一身,减少了术中器械配置和更换,大大缩短手术时间,其在切割组织同时可封闭细小血管,明显减少术中出血,其切割精度高,且极少产生焦痂和烟雾,其在重要脏器及大血管附近分离切割时安全性高,并且系统没有电流通过机体,不会发生传导性组织损伤,提高了手术安全性。
在当前市面上的超声手术器械超声刀产品中,如图1所示,主要包括:主机(1)、驱动柄(2)、刀头(3)和脚踏板(4)部件组成。主机(1)通过连线分别与脚踏板(4)和驱动柄(2)的一端连接,驱动柄(2)的另一端与刀头(3)相连接,驱动柄(2)的内部设有一换能器(图1中未示出),该换能器把主机(1)提供的高频电能转换成超声机械振动能,并传递至刀头(3)的同时传递超声能量,对组织进行止血切割或凝固,刀头的振动频率约为55.5kHz。
超声刀的刀头组件(3)的远端类似剪刀,具有两端,一端是施加超声波的刀尖端(31),另一端为带有齿纹的夹持垫(32),当夹持组织时,夹持垫(32)靠近刀尖端(31),当释放组织时,夹持垫(32)远离刀尖端(31),夹持垫(32)能够更好地夹持组织加强凝血效果。
现有技术中的超声刀的扳机(21)内置一个弹簧,当超声刀的刀头组件(3)在工作时,需要操作者通过手动闭合驱动柄(2)的扳机(21),使刀头组件(3)远端的刀尖夹紧组织,然后再进行切割,切割完成后,松开扳机(21),在弹簧的作用下扳机(21)可以自动回弹。
采用上述现有结构的超声刀,一方面,虽然内置弹簧可以实现扳机(21)自动弹开,但是弹簧的弹力也使得闭合扳机的力度加大,长时间使用会对使用者造成疲劳。另一方面,超声刀在工作过程中,闭合刀头时,需要使用者一直手握扳机,直到组织已经切割完成,在切割期间,手部需要一直用力来保证前端组织已夹紧,若前端未按要求夹紧组织,则有可能会影响切割止血效果。
目前有一些超声刀刀头厂家为了解决上述问题,采用在手柄处内置一个卡位构件的方式,即,当刀头组件闭合时,刀头组件不会自动回弹,只有当用手轻轻往闭合的反方向推扳机时,刀头组件受力才自动回弹。该方案虽然解决了操作者长时间夹紧扳机带来的不便。但是由于操作方式的改变,不仅需要使用者改变使用习惯来适应新的刀头组件,更重要的是,当刀头组件闭合时,仍需要操作者用力去克服弹簧的弹力,即,上述方案仅仅解决了操作者不需要始终握持刀头组件的问题,而并没有解决刀头组件初始闭合时操作者的耗力问题。
如何设计一种超声手术器械及其控制方法能够解决刀头组件初始闭合时的耗力问题是本领域技术人员迫切需要解决的技术问题。
发明内容
本发明要解决的技术问题是解决现有技术中手术过程中,超声手术器械刀头初始闭合时的耗力的技术问题。
为解决上述技术问题,本发明提供的技术方案如下:
一种超声手术器械,包括,驱动手柄、套设在内套管的波导杆、刀头组件,所述驱动手柄的远端与所述波导杆近端相连,所述波导杆的远端与所述刀头组件的近端相连,其特征在于,还包括推拉构件、马达、传动构件,
所述推拉构件近端与所述马达相连,所述推拉构件的远端与所述传动构件的近端活动连接,所述传动构件的远端与所述内套管近端相连,
当所述刀头组件进行闭合动作时,所述马达驱动所述推拉构件执行拉回动作,驱动所述传动构件拉动所述内套管向近端方向移动;
当所述刀头组件进行张开动作时,所述马达驱动所述推拉构件执行推动动作,驱动所述传动构件推动所述内套管向远端方向移动。
进一步地,还包括开关元件,所述开关元件设置于所述驱动手柄上,用于控制所述马达的启停动作。
进一步地,所述马达包括:
限位单元,检测单元,驱动单元以及控制单元,其中:
所述限位单元,用于监测所述马达是否运行至预设位置,并将监测信息发送至所述控制单元;
所述检测单元,用于检测所述马达的参数信息,并将所述参数信息发送至所述控制单元;
所述控制单元,用于根据接收到的所述参数信息以及所述限位单元的监测信息,确定所述马达的工作状态,向所述驱动单元发送控制信号;
所述驱动单元;用于根据所述控制单元发送的控制信号驱动所述马达工作。
进一步的,所述参数信息包括所述马达的输入电流/电压;所述控制单元,用于根据接收到的所述输入电流/电压,确定所述输入电流/电压超出了预设的输入电流/电压阈值范围,则向所述驱动单元发送第一控制信号,使所述驱动单元驱动所述马达停止工作。
进一步的,所述传动构件包括第一传动杆,连接杆,第二传动杆,
所述第一传动杆的第一端与所述推拉构件远端活动连接;
所述第一传动杆的第二端通过所述连接杆与所述第二传动杆的第一端相连;
所述第一传动杆的第三端通过第一钉销活动固定于所述驱动手柄内壳上,使所述第一传动杆在所述推拉构件的作用下,以所述第三端为轴进行限位活动;
所述第二传动杆的第二端与所述内套管近端相连。
进一步地,所述第二传动杆表面至少设有一个通孔,所述通孔插有第二钉销,所述第二钉销的长度大于所述第二传动杆的厚度,所述驱动手柄的外壳体内壁对应分别设有一条形凹槽,所述第二钉销可以沿所述条形凹槽滑移。
进一步地,所述第一传动杆为Y形结构或者V型结构,所述第二传动杆为L形结构。
本发明还提供了一种超声手术器械的控制方法,包括:
接收工作指令;
获取监测信息以及参数信息;
根据所述监测信息以及参数信息控制马达工作,使所述刀头组件执行张开/闭合动作。
进一步的,所述工作指令包括所述刀头组件张开指令和所述刀头组件闭合指令,
当接收到所述刀头组件张开指令时,根据所述张开指令控制所述马达正向转动;
当接收到所述刀头组件闭合指令时,根据所述闭合指令控制所述马达反向转动。
进一步的,所述参数信息包括所述马达的输入电流/电压,根据接收到的所述输入电流/电压,确定所述输入电流/电压超出了预设的输入电流/电压阈值范围,发送第一控制信号,使所述马达停止工作。
采用这样的设计后,本发明至少具有以下优点:
(1)本发明公开的技术方案,通过将传统手动闭合改为了电动闭合,极大地缓解了操作者刀头初始闭合时的耗力问题。
(2)本发明公开的技术方案,电动闭合可以带来更稳定,更持续的压力,使得切割效果更均匀一致。
(3)本发明结构简单,效果好,且成本低,易工艺实现。
附图说明
上述仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,以下结合附图与具体实施方式对本发明作进一步的详细说明。
图1是现有技术中超声手术器械系统示意图;
图2是本发明超声手术器械结构示意图;
图3是本发明驱动柄结构示意图;
图4是本发明驱动柄部分爆炸结构图;
图5是本发明马达工作示意图;
图6是本发明马达结构示意图;
附图标记中,1主机,2驱动柄,21扳机,3刀头组件,31刀尖端,32夹持垫,4脚踏板,5波导杆,6内套管,7推拉构件,8马达,81限位单元,82检测单元,83控制单元,84驱动单元,9传动构件,91第一传动杆,911第一传动杆的第一端,912第一传动杆的第二端,913第一钉销,92连接杆,93第二传动杆,931通孔,932第二钉销,933凹槽,10开关元件,
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本文中,“上”、“下”等仅用于表示相关部分之间的相对位置关系,而非限定这些相关部分的绝对位置。
除非另有说明,本文中的数值范围不仅包括其两个端点内的整个范围,也包括含于其中的若干子范围。
以下每个部件靠近操作者的一端定义为近端,远离操作者的一端定义为远端。该近端、远端的表达只用于使描述简单、清楚,不应该理解为对本发明的任何限定。
结合如图2-图6所示,对本发明进行阐述。
本发明公开了一种超声手术器械,包括,驱动柄(2)、套设在内套管(6)的波导杆(5)、刀头组件(3),驱动柄(2)的远端与波导杆(5)近端相连,波导杆(5)的远端与刀头组件(3)的近端相连,还包括推拉构件(7)、马达(8)、传动构件(9),推拉构件(7)近端与马达(8)相连,推拉构件(7)的远端与传动构件(9)的近端活动连接,传动构件(9)的远端与内套管(6)近端相连,
当刀头组件(3)进行闭合动作时,马达(8)驱动推拉构件(7)执行回拉动作,驱动传动构件(9)拉动内套管(6)向近端方向移动;当刀头组件(3)进行张开动作时,马达(8)驱动推拉构件(7)执行推动动作,驱动传动构件(9)推动内套管(6)向远端方向移动。
具体的,当使刀头组件(3)进行闭合动作时,启动马达(8),马达(8)开始工作,驱动推拉构件(7)在水平方向上向近端方向推行前进,从而带动传动构件(9)沿水平方向向近端方向移动,因传动构件(9)远端与内套管(6)近端连接,传动构件(9)推动内套管(6)向近端移动,因内套管(6)向近端移动,使刀头组件(3)进行闭合动作。
在这里,刀头组件(3)包括夹持垫(31)和刀尖端(32),夹持垫(31)的近端与刀尖端(32)的近端活动连接,传动构件(9)推动内套管(6)向近端移动,使刀头组件(3)的夹持垫(31)的远端与刀尖端(32)的远端相对运动进行闭合动作。
当使刀头组件(3)进行张开动作时,启动马达(8),马达(8)开始工作,驱动推拉构件(7)在水平方向上向远端方向推拉,从而带动传动构件(9)沿水平方向向远端方向移动,因传动构件(9)远端与内套管(6)近端固定连接,传动构件(9)推动内套管(6)向远端移动,因内套管(6)向远端移动,使刀头组件(3)的夹持垫(31)的远端与刀尖端(32)的远端相向运动进行张开动作。
进一步的,马达可以根据需要设置采用匀速、步进速度等多种速度方式,另外,刀头组件的张开速度和闭合速度可以相同也可以不同,具体的开合速度根据需要设定,在此不做赘述。
本发明方案,通过将传统手动方式实现刀头组件的闭合改为了采用刀头组件电动自动开合方式,极大地缓解了操作者进行刀头组件开合时的耗力问题。
本发明方案还包括开关元件(10),开关元件(10)设置于超声刀外壳上,开关元件(10)用于控制马达(8)启停动作。当开关元件(10)闭合时,马达(8)启动工作,当开关元件(10)断开时,马达(8)停止工作。
具体的,开关元件(10)可以设置在扳机(21)上,便于操作者操作。当按下扳机上的开关元件(10),马达(8)启动工作,刀头组件(3)执行闭合动作;当松开扳机上的开关元件(10),刀头组件(3)执行张开动作。
当然,也可以设置成,短暂时间按压扳机开关元件(10),示例性的,按下扳机上的开关元件(10)后立即松开,马达(8)启动工作,刀头组件(3)执行闭合动作;再次按下扳机上的开关元件(10)后立即松开,刀头组件(3)执行张开动作。本发明方案中的开关元件(10),只要保证开关元件(10)能够控制马达(8)的启动动作即可。可以根据操作者操作的方便程度,设置不同的启动方式。
进一步地,开关元件(10)可以为轻触开关也可以为触摸开关,当为触摸开关元件时,同样将该触摸开关元件设置在扳机处,当手指放在扳机处的触摸面板上时,刀头组件执行闭合动作,当手指移开触摸面板时,刀头组件执行张开动作。
另外,马达(8)的工作电源可以通过内置电池获取,也可以在驱动柄(2)外壳尾端设置一插口,直接从主机(1)处获取。
本发明实施例中,马达(8)包括:限位单元(81),检测单元(82),控制单元(83)、驱动单元(84);
限位单元(81)与控制单元(83)相连,用于监测所述马达(8)是否运行至预设位置,并将监测信息发送至控制单元(83);
具体的,预先对马达(8)的行程位移范围进行了预设,马达(8)在预设位移范围内移动属于正常工作范围,超过了预设位移范围则属于工作异常,限位开关(81)将会将异常信息发送至控制单元(83)。
限位单元(81)为一限位开关,当马达(8)正向转动运行过程中,带动推拉构件(7)从初始位置向远端移动并通过传动单元(9)驱动刀头组件(3)执行夹紧动作,当推拉构件(7)移动至预先设置的最远位置时,限位开关启动,使马达停止工作;当马达(8)反向转动运行过程中,带动推拉构件(7)从最远位置向近端移动并通过传动单元(9)驱动刀头组件(3)执行张开动作,当推拉构件(7)移动至初始位置时,限位开关启动,使马达(8)停止工作。
本发明实施例中,推拉构件(7)从初始位置到最大位置之间的距离大于刀头组件(3)的夹持垫与刀尖端之间的相对运动距离。优选的,推拉构件(7)从初始位置到最大位置之间的距离为1cm--3cm左右。
检测单元(82)与控制单元(83)相连,用于检测马达(8)的参数信息,并将参数信息发送至控制单元(83);
控制单元(83),用于根据接收到的参数信息以及限位单元的监测信息,确定马达(8)的工作状态,向驱动单元(84)发送控制信号,使驱动单元(84)驱动马达(8)做相应动作。
其中,参数信息为马达(8)的输入电流信号,当控制单元(83)根据输入电流信号,确认输入电流超出了预设的输入电流阈值范围,马达(8)工作状态异常时,控制单元(83)向推拉构件(7)发送第一控制信号,使驱动单元(84)驱动马达(8)停止动作。
需要说明的是,参数信息还可以为马达(8)的输入电压、输出电压、输出电流等任一参数信息,或其他表示马达实时状态的参数信息,可以根据需要进行设定,本发明实施例对此不作任何限定。
本发明通过增加检测单元(82),对马达(8)工作状态进行监控,一方面,有效延长了马达的使用寿命,另一方面,使马达电控控制更加精准。
本发明方案中,传动构件(9)包括第一传动杆(91),连接杆(92),第二传动杆(93),第一传动杆(91)的第一端与推拉构件(7)远端活动连接;第一传动杆(91)的第二端通过连接杆(92)与第二传动杆(93)的第一端相连;第一传动杆(91)的第三端通过第一钉销活动固定于驱动手柄内壳上,使第一传动杆(91)在推拉构件(7)的作用下,以第三端为轴进行限位活动;第二传动杆(93)的第三端与内套管(6)近端相连。
具体的,第一传动杆(91)的第一端(911)与推拉构件(7)远端活动连接形成第一活动连接点;第一传动杆(91)的第二端(912)与连接杆(92)一端相连形成第二连接点;连接杆(92)另一端与第二传动杆(93)的第一端相连形成第三连接点;第一传动杆(91)的第三端设有一通孔,通过第一钉销(913)与器械内壳活动固定连接,第一传动杆(91)可以第一钉销(913)为轴进行限位转动。
第一传动杆(91)的第一端紧贴器械内壳侧壁,当推拉构件构件(7)在马达(8)驱动下,沿水平方向向远端移动时,使第一活动连接点也向远端移动,因受器械内壳侧壁的抵档作用,又因第一传动杆(91)的第一端(911)与推拉构件(7)远端活动连接,使第一传动杆(91)以第一活动连接点为轴向推拉构件(7)方向倾斜,从而带动第一传动杆(91)的第二端(912)沿着与连接杆(92)相连的第二连接点方向向下运动,使第二传动杆(93)沿水平方向向远端移动,推动内套管(6)向远端移动,使刀头组件(3)张开。
当推拉构件(7)在马达(8)驱动下,沿水平方向向近端移动时,使第一活动连接点也向近端移动,从而带动第一传动杆(91)的第二端(912)沿着与连接杆(92)相连的第二连接点方向向上运动,从而使第二传动杆(93)沿水平方向向远端移动,拉动内套管(6)向远端移动,使刀头组件(3)闭合。
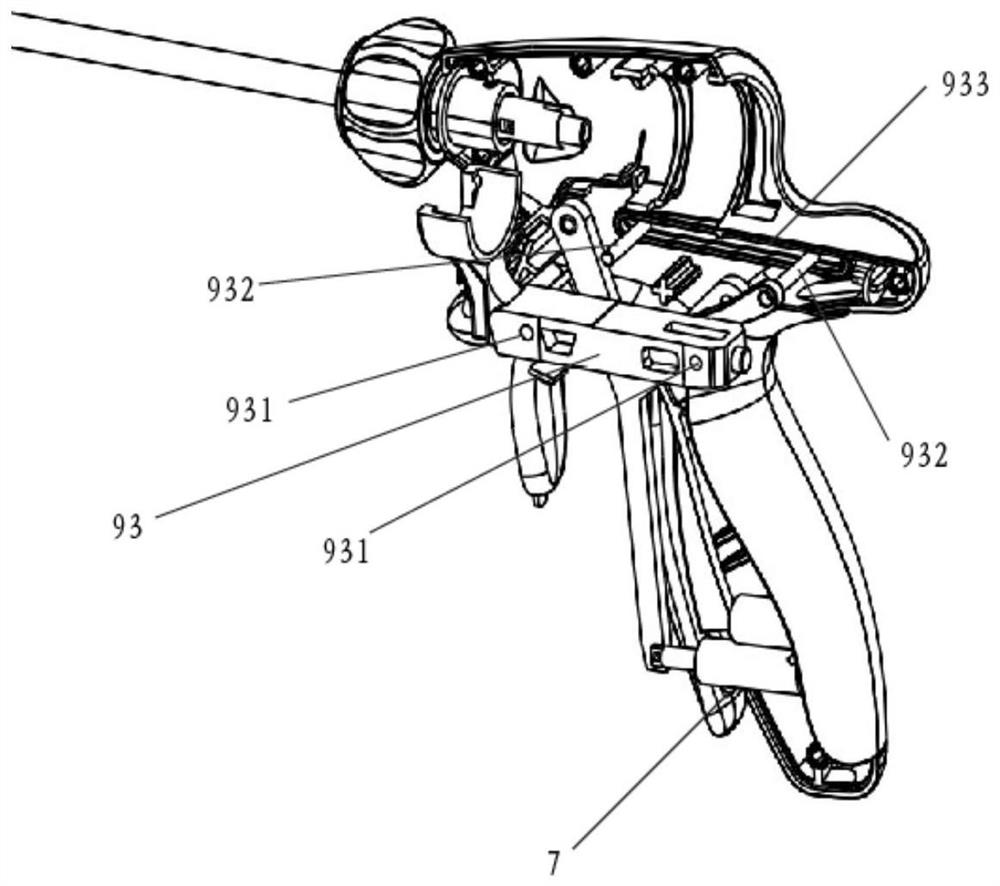
进一步的,第二传动杆表面至少设有一个通孔(931),通孔(931)插有第二钉销(932),第二钉销(932)的长度大于第二传动杆(93)的厚度,器械的外壳体内壁对应设有一条形凹槽(933)为第二钉销(932)的滑移轨道,第二钉销(932)可以沿条形凹槽滑移。
优选的,通孔(931)为2个,分别位于第二传动杆(93)两端。器械的外壳体内壁分别设有一条形凹槽(933),第二钉销(932)两端分别位于条形凹槽(933)内,可沿条形凹槽(933)滑移。
条形凹槽(933)为第二钉销(932)的滑移轨道,便于对第二传动杆(93)固定,使第二传动杆(93)水平方向上稳定滑移。
本发明实施例中,第一传动杆(91)为Y形结构或者V型结构。第二传动杆(93)为L形结构。也可以根据需要采用其他形状结构。
本申请另一实施例提供一种超声手术器械的控制方法,包括:
接收工作指令;
获取监测信息以及参数信息;
根据所述监测信息以及参数信息控制马达工作,使所述刀头组件执行张开/闭合动作。
具体的,工作指令包括刀头组件张开指令和刀头组件闭合指令,
当接收到刀头组件张开指令时,根据张开指令控制马达正向转动;
当接收到刀头组件闭合指令时,根据闭合指令控制马达反向转动。
进一步的,参数信息包括所述马达的输入电流/电压,根据接收到的所述输入电流/电压,确定所述输入电流/电压超出了预设的输入电流/电压阈值范围,发送第一控制信号,使所述马达停止工作。
需要说明的是,参数信息还可以为马达的输出电流/电压等任一参数信息,或其他表示马达实时状态的参数信息,可以根据需要进行设定,本发明实施例对此不作任何限定。
当然,上述仅为示例性的举例,可以根据齿轮的实际情况,发出该指令时,设置正转或者反转的方向,根据需要进行设定,在此不做赘述。本发明结构简单,降低企业采购零件的成本,同时也降低了患者的手术成本,效果好,且成本低,易工艺实现。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
- 超声波手术刀系统及其控制方法、超声波手术器械
- 一种超声刀手术器械