一种智能机器人焊接设备的过焊保护装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及焊接设备技术领域,具体为一种智能机器人焊接设备的过焊保护装置。
背景技术
金属普遍具有热塑性,焊接是金属器件在组装固定时常用的连接手段,大到航空航天,小到生活用品,金属焊接早已无处不在,随着人工智能机器人的发展进步,焊接逐渐开始从人手动操作,逐渐往机械作业发展,这不仅更加安全,焊接准确性和效率也更高。
现有的焊接机器人高温焊头通过步进电机驱动保持其行程和精度,但为保证焊接质量往往会多预留一定的行程余裕,这也有助于避免运动器件间碰撞,但随着使用,这种行程余裕往往会造成过焊,极大的浪费焊料,不符合节能环保要求,且对于有些设备来说,过焊还会给设备行带来不稳定,应极力避免。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种智能机器人焊接设备的过焊保护装置,具备可调节焊头行程范围,有效解决过焊的优点,解决了上述背景技术中的问题。
(二)技术方案
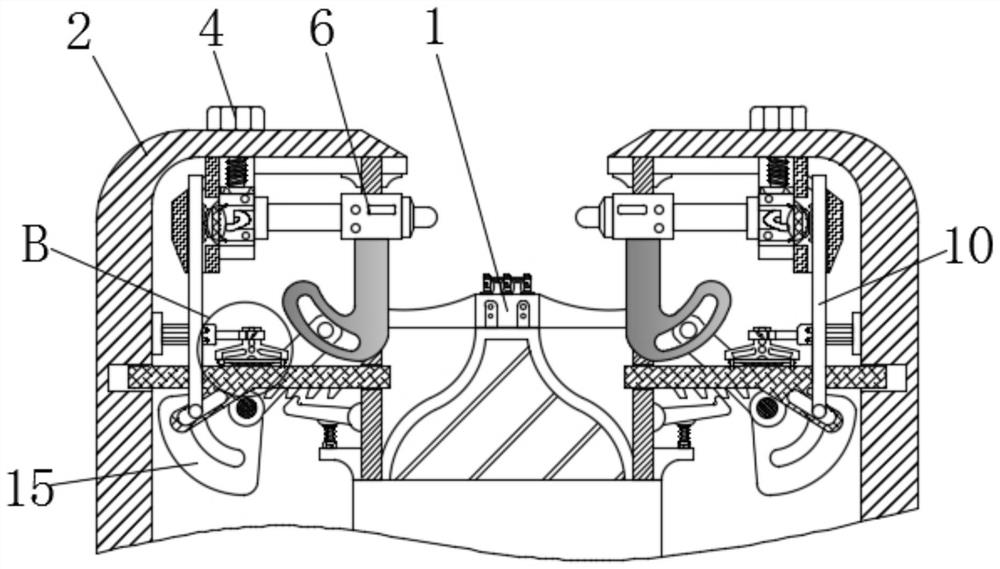
为实现上述可调节焊头行程范围,有效解决过焊的目的,本发明提供如下技术方案:一种智能机器人焊接设备的过焊保护装置,包括焊座,所述焊座的左右两侧设置有焊接室,所述焊接室靠近焊座的一侧设置有隔热板,所述焊接室上端设置有手调旋钮,所述手调旋钮的下方设置有给料盒,所述给料盒靠近焊座的一端固定连接有焊头,所述焊头的下端活动连接有钩形件,所述给料盒内设置有调节齿轮,所述给料盒远离焊座的一侧设置有导槽,所述导槽内设置有调整杆,所述调整杆的下端活动连接有棘齿条,所述棘齿条的上端设置有卡接座,所述卡接座的上方活动连接有夹持器,所述夹持器远离焊座的一侧活动连接有主动推杆,所述棘齿条的后方设置有扇形拨叉,所述隔热板靠近棘齿条的下端设置有扣爪,所述扣爪的下方设置有主动扣。
优选的,所述隔热板靠近焊座处开设有开口与钩形件适配。
优选的,所述给料盒外接焊料供给设备,右端焊料棒穿过焊头靠近焊座。
优选的,所述上设置有齿条与调节齿轮适配。
优选的,所述棘齿条下部设置有斜开槽与调整杆下端适配。
优选的,所述扇形拨叉为一端设置有扇形槽的杆结构,其中部设置有转轴,扇形端与调整杆下端适配,其转轴设置与棘齿条空间垂直,另一端与钩形件下端适配。
优选的,所述扣爪向上设置与棘齿条下端棘齿适配。
(三)有益效果
与现有技术相比,本发明提供了一种智能机器人焊接设备的过焊保护装置,具备以下有益效果:
1、该智能机器人焊接设备的过焊保护装置,通过棘齿条动作时,调整杆沿斜开槽移动,带动调节齿轮转动可控制给料,可以控制同一焊点处焊料供给速度,保护不会过焊。
2、该智能机器人焊接设备的过焊保护装置,通过在焊料供给调整的同时,斜开槽的偏移会同步限制扇形拨叉的偏转范围,继而控制钩形件的行程极限,既可以提高焊接控制的精度,又保证了焊头在不过焊的同时,对焊点、焊缝提供足够焊料,不会虚焊。
附图说明
图1为本发明主要结构示意图;
图2为本发明焊接室结构示意图;
图3为本发明图2中A部分放大示意图;
图4为本发明图1中B部分放大示意图;
图5为本发明棘齿条动作结构示意图。
图中:1、焊座;2、焊接室;3、隔热板;4、手调旋钮;5、给料盒;6、焊头;7、钩形件;8、调节齿轮;9、导槽;10、调整杆;11、棘齿条;12、卡接座;13、夹持器;14、主动推杆;15、扇形拨叉;16、扣爪;17、主动扣。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,一种智能机器人焊接设备的过焊保护装置,包括焊座1,焊座1的左右两侧设置有焊接室2,焊接室2靠近焊座1的一侧设置有隔热板3,焊接室2上端设置有手调旋钮4,手调旋钮4的下方设置有给料盒5,给料盒5靠近焊座1的一端固定连接有焊头6,焊头6的下端活动连接有钩形件7,给料盒5内设置有调节齿轮8,给料盒5远离焊座1的一侧设置有导槽9,导槽9内设置有调整杆10,调整杆10的下端活动连接有棘齿条11,棘齿条11的上端设置有卡接座12,卡接座12的上方活动连接有夹持器13,夹持器13远离焊座1的一侧活动连接有主动推杆14,棘齿条11的后方设置有扇形拨叉15,隔热板3靠近棘齿条11的下端设置有扣爪16,扣爪16的下方设置有主动扣17。
其中,隔热板3靠近焊座1处开设有开口与钩形件7适配。
其中,给料盒5外接焊料供给设备,右端焊料棒穿过焊头6靠近焊座1。
其中,上设置有齿条与调节齿轮8适配。
其中,棘齿条11下部设置有斜开槽与调整杆10下端适配。
其中,扇形拨叉15为一端设置有扇形槽的杆结构,其中部设置有转轴,扇形端与调整杆10下端适配,其转轴设置与棘齿条11空间垂直,另一端与钩形件7下端适配。
其中,扣爪16向上设置与棘齿条11下端棘齿适配。
工作原理:该智能机器人焊接设备的过焊保护装置,给料盒5靠近焊座1的一端固定连接有焊头6,焊头6靠近焊座1,配合给料盒5提供焊料进行焊接作业。给料盒5内设置有调节齿轮8,给料盒5远离焊座1的一侧设置有导槽9,导槽9内设置有调整杆10,调整杆10的下端活动连接有棘齿条11,棘齿条11下部设置有斜开槽与调整杆10下端适配,主动推杆14推动夹持器13,带动棘齿条11动作时,调整杆10沿斜开槽移动,带动调节齿轮8转动可控制给料,可以控制同一焊点处焊料供给速度,保护不会过焊。
同时,焊头6的下端活动连接有钩形件7,钩形件7转动、偏转,平移可带动焊头6进行相应动作,对焊接点位进行调整,扇形拨叉15扇形端与调整杆10下端适配,其转轴设置与棘齿条11空间垂直,另一端与钩形件7下端适配,焊料供给调整的同时,斜开槽的偏移会同步限制扇形拨叉15的偏转范围,继而控制钩形件7的行程极限,既可以提高焊接控制的精度,又保证了焊头6在不过焊的同时,对焊点、焊缝提供足够焊料,不会虚焊。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种智能机器人焊接设备的过焊保护装置
- 焊线机气体保护装置及使用该焊线机气体保护装置的全自动焊线机