物料搬运车辆的操作员控制系统
文献发布时间:2023-06-19 18:27:32
技术领域
本发明提供用于物料搬运车辆的操作员控制系统,其中操作员控制系统的一个或多个部件是可调节的。
背景技术
已知的物料搬运车辆包括动力单元、桅杆组件和操作员舱室。桅杆组件可以包括多个桅杆焊接件,其中第一桅杆焊接件可以固定到动力单元,并且一个或多个其它的桅杆焊接件可以被支撑成用于进行伸缩运动。物料搬运车辆中的操作员舱室可支撑在桅杆组件上进行竖直移动,以定位操作员从升高位置处的搁架上取回物品。
发明内容
根据本公开的第一方面,提供一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括具有地板和支撑结构的操作员工位,操作员控制系统包括:操作员控制组件;固定结构,其联接到支撑结构以相对于支撑结构以多个角度取向选择性地支撑操作员控制组件;以及竖直调节组件,其联接到操作员控制组件以相对于地板在多个竖直位置处选择性地支撑操作员控制组件。
固定结构可以包括具有一个或多个第一开口和一个或多个第二开口的安装板以及将操作员控制组件的壳体联接到支撑结构的多个紧固件。当紧固件被接纳在安装板的一个或多个第一开口中时,操作员控制组件可以相对于支撑结构以第一角度取向安装,当紧固件被接纳在安装板的一个或多个第二开口中时,操作员控制组件可以相对于支撑结构以第二角度取向安装,其中第二角度取向可以不同于第一角度取向。当从第一角度取向运动到第二角度取向时,操作员控制组件可以围绕大致平行于物料搬运车辆的纵向轴线的轴线旋转。
支撑结构可以包括固定壳体部分和可移动壳体部分,其中可移动壳体部分可以联接到操作员控制组件并能够与操作员控制组件一起移动,并且可以定位成在固定壳体部分上方进行伸缩运动。
操作员控制组件可以在第一竖直位置和第二竖直位置之间沿竖直方向连续运动。
竖直调节组件可以包括:附接到物料搬运车辆的支撑壁的安装板、附接到安装板的轨道构件、可移动地联接到轨道构件并联接到固定结构的滑架组件、以及联接到固定结构和安装板以控制操作员控制组件的竖直位置的锁定气体弹簧。
根据本公开的第二方面,提供了一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括操作员工位,该操作员工位具有地板、第一支撑结构和在横向方向上与第一支撑结构间隔开的第二支撑结构,操作员控制系统包括:第一操作员控制组件;第一固定结构,其联接到第一支撑结构,以相对于第一支撑结构选择性地以多个角度取向支撑第一操作员控制组件;和第一竖直调节组件,其联接到第一操作员控制组件,以相对于地板将第一操作员控制组件选择性地支撑在多个竖直位置处;以及第二操作员控制组件;第二固定结构,其联接到第二支撑结构以相对于第二支撑结构以多个角度取向选择性地支撑第二操作员控制组件;和第二竖直调节组件,其联接到第二操作员控制组件以相对于地板将第二操作员控制组件选择性地支撑在多个竖直位置处。
第一固定结构可以包括具有一个或多个第一开口和一个或多个第二开口的第一安装板以及将第一操作员控制组件的第一壳体联接到第一支撑结构的多个第一紧固件。当多个第一紧固件被接纳在所述一个或多个第一开口中时,第一操作员控制组件可以相对于第一支撑结构以第一角度取向安装,当多个第一紧固件被接纳在所述一个或多个第二开口中时,第一操作员控制组件可以相对于第一支撑结构以第二角度取向安装,其中第二角度取向可以不同于第一角度取向。第二固定结构可以包括具有一个或多个第三开口和一个或多个第四开口的第二安装板以及将第二操作员控制组件的第二壳体联接到第二支撑结构的多个第二紧固件。当多个第二紧固件被接收在一个或多个第三开口中时,第二操作员控制组件可以相对于第二支撑结构以第三角度取向安装,当多个第二紧固件被接纳在所述一个或多个第四开口中时,第二操作员控制组件可以相对于第二支撑结构以第四角度取向安装,其中第四角度取向可以不同于第三角度取向。
当从第一角度取向运动到第二角度取向时,第一操作员控制组件可围绕大致平行于物料搬运车辆的纵向轴线的第一轴线旋转,并且当从第三角度取向运动到第四角度取向时,第二操作员控制组件可以围绕大致平行于物料搬运车辆的纵向轴线的第二轴线沿相反方向旋转。
第一支撑结构可以包括第一固定壳体部分和第一可移动壳体部分,其中第一可移动壳体部分可以联接到第一操作员控制组件并能够与第一操作员控制组件一起移动,并且可以定位成在第一固定壳体部分上进行伸缩运动。第二支撑结构可以包括第二固定壳体部分和第二可移动壳体部分,其中第二可移动壳体部分可以联接到第二操作员控制组件并能够与第二操作员控制组件一起移动,并且可以定位成在第二固定壳体部分上进行伸缩运动。
第一操作员控制组件可以在第一竖直位置和第二竖直位置之间在竖直方向上连续运动,并且第二操作员控制组件可以在第三竖直位置与第四竖直位置之间沿竖直方向连续运动。
第一操作员控制组件的角度取向或竖直位置中的至少一个可以独立于第二操作员控制组件的角度取向或竖直位置中的至少一个进行调节。
第一竖直调节组件可以包括:附接到物料搬运车辆的支撑壁的第一安装板、附接到第一安装板的第一轨道构件、可移动地联接到第一轨道构件并联接到第一固定结构的第一滑架组件、以及联接到第一固定结构和第一安装板以控制第一操作员控制组件的竖直位置的第一锁定气体弹簧。第二竖直调节组件可以包括:附接到物料搬运车辆的支撑壁的第二安装板、附接到第二安装板的第二轨道构件、可移动地联接到第二轨道构件并联接到第二固定结构的第二滑架组件、以及联接到第二固定结构和第二安装板以控制第二操作员控制组件的竖直位置的第二锁定气体弹簧。
根据本公开的第三方面,提供一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括具有大致水平的地板表面和支撑结构的操作员工位,操作员控制系统包括:操作员控制组件和竖直调节组件,该竖直调节组件联接到操作员控制组件以相对于大致水平的地板表面在多个竖直位置处选择性地支撑操作员控制组件。操作员控制组件可以包括安装到支撑结构的壳体和用于使物料搬运车辆转向的转向组件。转向组件可以包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于第一壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中。当处于第一位置时,转向控制结构可大致以第一取向从基部结构延伸,而当处于第二位置时,转向控制结构可以大致以与第一取向不同的第二取向从基部结构延伸。
基部结构可以包括基板和联接到基板的安装件,其中该安装件能够可枢转地安装在壳体的承接部内,以使转向组件能够在第一位置和第二位置之间运动。
当转向组件定位在第一位置中时,转向控制结构可以相对于竖直平面以锐角取向,其中该竖直平面可以垂直于车辆的大致水平的地板表面。当转向组件定位在第二位置中时,转向控制结构可以相对于水平平面以锐角取向,其中该水平平面可以平行于车辆的大致水平的地板表面。
操作员控制系统还可以包括用于将转向组件锁定在第一位置或第二位置中的至少一个位置中的锁定组件,其中锁定组件包括锁定释放结构,该锁定释放结构用于解锁该锁定组件,使得转向组件能够在第一位置或第二位置中的至少一个位置之间运动。
转向组件可以独立于支撑结构和壳体进行运动,使得当转向组件处于第一位置和第二位置时,支撑结构和壳体保持在相同位置。壳体还可以包括控制元件区域,并且转向组件可以独立于控制元件区域进行运动。
支撑结构可以包括固定壳体部分和可移动壳体部分,其中可移动壳体部分可以联接到操作员控制组件并能够与操作员控制组件一起移动,并且可以定位成在固定壳体部分上方进行伸缩运动。
操作员控制组件可以在第一竖直位置和第二竖直位置之间沿竖直方向连续运动。
竖直调节组件可以包括:附接到车辆的支撑壁的安装板、附接到安装板的轨道构件、可移动地联接到轨道构件并联接到固定结构的滑架组件、以及联接到固定结构和安装板以控制操作员控制组件的竖直位置的锁定气体弹簧。
根据本公开的第四方面,提供了一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括操作员工位,操作员工位具有大致水平的地板表面、第一支撑结构和在横向方向上与第一支撑结构间隔开的第二支撑结构,操作员控制系统包括:第一操作员控制组件和第二操作员控制组件,其包括安装到第二支撑结构的第二壳体。第一操作员控制组件可以包括安装到第一支撑结构的第一壳体和用于使物料搬运车辆转向的转向组件。转向组件可以包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于第一壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中。当处于第一位置时,转向控制结构可大致以第一取向从基部结构延伸,而当处于第二位置时,转向控制结构可以大致以与第一取向不同的第二取向从基部结构延伸。操作员控制系统还可以包括:第一竖直调节组件,其联接到第一操作员控制组件,以相对于大致水平的地板表面将第一操作员控制组件选择性地定位在多个竖直位置处;以及第二竖直调节组件,其联接到第二操作员控制组件,以相对于大致水平的地板表面将第二操作员控制组件选择性地定位在多个竖直位置处。
基部结构可以包括基板和联接到基板的安装件,其中该安装件能够可枢转地安装在壳体的承接部内,以使转向组件能够在第一位置和第二位置之间运动。
当转向组件定位在第一位置中时,转向控制结构可以相对于竖直平面以锐角取向,其中该竖直平面可以垂直于车辆的大致水平的地板表面。当转向组件定位在第二位置中时,转向控制结构可以相对于水平平面以锐角取向,其中该水平平面可以平行于车辆的大致水平的地板表面。
转向组件可以独立于第一支撑结构和第一壳体进行运动,使得当转向组件处于第一位置和第二位置时,第一支撑结构和第一壳体保持在相同位置。第一壳体还可以包括控制元件区域,并且转向组件可以独立于控制元件区域进行运动。
第一支撑结构可以包括第一固定壳体部分和第一可移动壳体部分,其中第一可移动壳体部分可以联接到第一操作员控制组件并能够与第一操作员控制组件一起移动,并且可以定位成在第一固定壳体部分上进行伸缩运动。第二支撑结构可以包括第二固定壳体部分和第二可移动壳体部分,其中第二可移动壳体部分可以联接到第二操作员控制组件并能够与第二操作员控制组件一起移动,并且可以定位成在第二固定壳体部分上进行伸缩运动。
第一操作员控制组件可以在第一竖直位置和第二竖直位置之间在竖直方向上连续运动,并且第二操作员控制组件可以在第三竖直位置与第四竖直位置之间沿竖直方向连续运动。
第一操作员控制组件的竖直位置可以独立于第二操作员控制组件中的竖直位置进行调节。
第二操作员控制组件的竖直位置可以独立于第一操作员控制组件的竖直位置或转向组件的定位中的至少一个进行调节。
第一竖直调节组件可以包括:附接到物料搬运车辆的支撑壁的第一安装板、附接到第一安装板的第一轨道构件、可移动地联接到第一轨道构件并联接到第一固定结构的第一滑架组件、以及联接到第一固定结构和第一安装板以控制第一操作员控制组件的竖直位置的第一锁定气体弹簧。第二竖直调节组件可以包括:附接到物料搬运车辆的支撑壁的第二安装板、附接到第二安装板的第二轨道构件、可移动地联接到第二轨道构件并联接到第二固定结构的第二滑架组件、以及联接到第二固定结构和第二安装板以控制第二操作员控制组件的竖直位置的第二锁定气体弹簧。
根据本公开的第五方面,提供一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括具有支撑结构的操作员工位,操作员控制系统包括:操作员控制组件和竖直调节组件,该竖直调节组件联接到操作员控制组件以相对于地板在多个竖直位置处选择性地支撑操作员控制组件。操作员控制组件可以包括壳体,其安装到支撑结构,该壳体包括:凹部;第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在凹部上延伸;以及第一控制元件,其在凹部内安装到壳体,其中第一控制元件可以被配置为控制物料搬运车辆的功能。第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在所述至少一个抓握安装位置处安装到壳体并在凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置。
所述至少一个抓握安装位置可以包括第一抓握安装位置和第二抓握安装位置,其中第一抓握安装位置可以在凹部的第一侧上,第二抓握安装位置可以在凹部的第二侧上,凹部的第二侧与凹部的第一侧相对。
支撑结构可以包括固定壳体部分和可移动壳体部分,其中可移动壳体部分可以联接到操作员控制组件并能够与操作员控制组件一起移动,并且可以定位成在固定壳体部分上方进行伸缩运动。
操作员控制组件可以在第一竖直位置和第二竖直位置之间沿竖直方向连续运动。
竖直调节组件可以包括:附接到车辆的支撑壁的安装板、附接到安装板的轨道构件、可移动地联接到轨道构件并联接到固定结构的滑架组件、以及联接到固定结构和安装板以控制操作员控制组件的竖直位置的锁定气体弹簧。
根据本公开的第六方面,提供一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括具有支撑结构的操作员工位,操作员控制系统包括:操作员控制组件和竖直调节组件,该竖直调节组件联接到操作员控制组件以相对于地板在多个竖直位置处选择性地支撑操作员控制组件。操作员控制组件可以包括壳体,其安装到支撑结构,该壳体包括:凹部;第一长形抓握构件,其安装到壳体并在凹部上延伸;以及第一控制元件,其在凹部内安装到壳体,其中第一控制元件可以被配置为控制物料搬运车辆的功能,并且可以被定位在包括两个端部位置的多个位置。第一长形抓握构件可替换为在凹部上延伸且具有与第一抓握构件不同尺寸和/或不同构造的第二长形抓握构件,和/或第一控制元件可替换为可定位在包括两个端部位置的多个位置中且具有与第一控制元件不同尺寸和/或不同构造的第二控制元件。在第一控制元件或第二控制元件定位在其多个位置中的任何一个位置的情况下,第一控制元件或第二控制元件中的一个与第一抓握构件或第二抓握构件中的一个的相邻部分之间的间隙可以落在从最小间隙距离到最大到达距离的范围内。
第一长形抓握构件可以在第一和第二抓握安装位置处固定到壳体,其中第一抓握安装位置可以在凹部的第一侧上,第二抓握安装位置可以在凹部的第二侧上,凹部的第二侧与凹部的第一侧相对。
根据本公开的第七方面,提供了一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括具有地板和支撑结构的操作员工位,并且操作员控制系统包括操作员控制组件,该操作员控制组件包括:安装到支撑结构的壳体;竖直调节组件,其联接到操作员控制组件以相对于地板在多个竖直位置处选择性地支撑操作员控制组件;以及以下特征中的至少一个:转向组件,其用于使物料搬运车辆转向;或者固定结构,其联接到支撑结构,以相对于支撑结构以多个角度取向选择性地支撑操作员控制组件。转向组件可以包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于第一壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中。转向控制结构可以在处于第一位置时大致以第一取向从基部结构延伸,并且在处于第二位置时大致以第二取向从基结构延伸,其中第二取向可以不同于第一取向。
根据本公开的第八方面,提供了一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括具有地板和支撑结构的操作员工位,并且操作员控制系统包括操作员控制组件,该操作员控制组件包括:安装到支撑结构并包括凹部的壳体;竖直调节组件,其联接到操作员控制组件以相对于地板在多个竖直位置处选择性地支撑操作员控制组件;以及以下特征中的至少一个:第一控制元件,其在凹部内安装到壳体,和第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在凹部上延伸;或者固定结构,其联接到支撑结构,以相对于支撑结构选择性地以多个角度取向支撑操作员控制组件。第一长形抓握构件可替换为具有与第一抓握构件不同尺寸和/或不同构造的第二长形抓握构件,并且第一控制元件可替换为可定位在包括两个端部位置的多个位置中且具有与第一控制元件不同尺寸和/或不同构造的第二控制元件。
根据本公开的第九方面,提供了一种用于物料搬运车辆的操作员控制系统,其中物料搬运车辆包括操作员工位,操作员工位具有地板、第一支撑结构和在横向方向上与第一支撑结构间隔开的第二支撑结构,操作员控制系统包括第一操作员控制组件和第二操作员控制组件。第一操作员控制组件可以包括:第一壳体,其安装到第一支撑结构;第一竖直调节组件,其联接到第一操作员控制组件以相对于地板选择性地在多个竖直位置处支撑第一操作员控制装置;以及以下特征中到至少一个:转向组件,其用于使物料搬运车辆转向;或者第一固定结构,其联接到第一支撑结构以相对于第一支撑结构以多个角度取向选择性地支撑第一操作员控制组件。转向组件可以包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于第一壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中。转向控制结构可以在处于第一位置时大致以第一取向从基部结构延伸,并且在处于第二位置时大致以第二取向从基结构延伸,其中第二取向可以不同于第一取向。第二操作员控制组件可以包括:安装到第二支撑结构并包括凹部的第二壳体;第二竖直调节组件,其联接到第二操作员控制组件以相对于地板在多个竖直位置处选择性地支撑第二操作员控制组件;以及以下特征中的至少一个:第一控制元件,其在凹部内安装到壳体,和第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在凹部上延伸;或者第二固定结构,其联接到第二支撑结构,以相对于第二支撑结构选择性地以多个角度取向支撑第二操作员控制组件。第一长形抓握构件可替换为具有与第一抓握构件不同尺寸和/或不同构造的第二长形抓握构件,并且第一控制元件可替换为可定位在包括两个端部位置的多个位置中且具有与第一控制元件不同尺寸和/或不同构造的第二控制元件。
根据本公开的第十方面,提供了一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有支撑结构的操作员工位。该操作员控制系统包括操作员控制组件,该操作员控制组件包括:壳体,其安装到支撑结构或与支撑结构成一体,该壳体包括:凹部;第一长形抓握构件,其安装到壳体并在壳体凹部上延伸;以及第一控制元件,其在凹部内安装到壳体,第一控制元件被配置为控制物料搬运车辆的功能,并且可以被定位在包括两个端部位置的多个位置。以下特征中到至少一个:第一长形抓握构件能够替换为在壳体凹部上延伸并具有与第一抓握构件不同尺寸和/或或不同构造的第二长形抓握构件;或者第一控制元件能够替换为第二控制元件,该第二控制单元能够定位在包括两个端部位置的多个位置中并且具有与第一控制单元不同的尺寸和/或不同的配置。在第一控制元件或第二控制元件定位在其多个位置中的任何一个位置的情况下,第一控制元件或第二控制元件中的一个与第一抓握构件或第二抓握构件中的一个的相邻部分之间的间隙落在从最小间隙距离到最大到达距离的范围内。
壳体凹部可以具有曲线形状。
第一控制元件可以是开关或操纵杆。
第一长形抓握构件可以在第一和第二抓握安装位置处固定到壳体,其中第一抓握安装位置在壳体凹部的第一侧上,第二抓握安装位置在壳体凹部的第二侧上,壳体凹部的第二侧与壳体凹部的第一侧相对。
第一长形抓握构件可以包括第三控制元件,该第三控制元件被配置为控制物料搬运车辆的功能。
根据本公开的第十一方面,提供了一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有支撑结构的操作员工位。该操作员控制系统包括操作员控制组件,该操作员控制组件包括:壳体,其安装到支撑结构或与支撑结构成一体,该壳体包括:凹部;第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在壳体凹部上延伸;以及第一控制元件,其在凹部内安装到壳体,第一控制元件被配置为控制物料搬运车辆的功能。第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在所述至少一个抓握安装位置处安装到壳体并在壳体凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置。
壳体凹部可以具有曲线形状。
根据本公开的第十二方面,提供了一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有第一支撑结构的操作员工位。操作员控制系统包括第一操作员控制组件,该第一操作员控制组件包括:安装到第一支撑结构或与第一支撑结构成一体的第一壳体,第一壳体包括承接部;以及用于使物料搬运车辆转向的转向组件。转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸。基部结构包括基板和联接到基板的安装件,该安装件可枢转地安装在第一壳体的承接部内,使得转向组件能够在至少第一位置和第二位置之间运动。当处于第一位置时,转向控制结构大致以第一取向从基部结构延伸,而当处于第二位置时,转向控制结构大致以与第一取向不同的第二取向从基部结构延伸。
第一壳体还可以包括控制元件区域,并且转向组件可以独立于控制元件区域进行运动。无论转向控制组件处于第一位置还是第二位置,控制元件区域相对于第一支撑结构的取向可以保持不变。
安装件可以具有半球形形状,承接部可以具有对应的半球形形状。
基板可以包括围绕基板周边的多个凹口。
当转向组件定位在第一位置中时,转向控制结构可以相对于竖直平面以锐角取向,其中该竖直平面垂直于车辆的大致水平的地板表面。当转向组件定位在第二位置中时,转向控制结构可以相对于水平平面以锐角取向,其中该水平平面平行于车辆的大致水平的地板表面。
操作员控制系统还可以包括用于将转向组件锁定在第一位置或第二位置中的至少一个位置中的锁定组件。锁定组件可以包括锁定释放结构,该锁定释放结构用于解锁该锁定组件,使得转向组件能够在第一位置或第二位置中的至少一个位置之间运动。
根据本公开的第十三方面,提供一种用于物料搬运车辆的操作员控制系统。物料搬运车辆包括具有第一支撑结构和第二支撑结构的操作员工位,其中第一支撑结构和第二支撑结构在物料搬运车辆的横向方向上彼此间隔开,该横向方向垂直于物料搬运车辆的纵向轴线,所述操作员控制系统包括:操作员控制系统包括:第一操作员控制组件,其经由第一固定结构支撑在第一支撑结构上,该第一固定结构相对于第一支撑结构以至少第一角度取向和第二角度取向中的一个角度取向选择性地支撑第一操作员控制组件;以及第二操作员控制组件,其经由第二固定结构支撑在第二支撑结构上,该第二固定结构相对于第二支撑结构以至少第一角度取向和第二角度取向中的一个角度取向选择性地支撑第二操作员控制组件。第一操作员控制组件和第二操作员控制组件以各自的第一角度取向或第二角度取向所进行的定位取决于第一支撑结构相对于第二支撑结构在横向方向上的间距。
第一和第二固定结构可各自包括连接到相应的第一或第二支撑结构的安装板以及延伸穿过安装板中设置的开口的多个紧固件。紧固件可以将第一和第二操作员控制组件的相应的第一和第二壳体联接到对应的支撑结构。
每个安装板可以包括一个或多个第一开口以及一个或多个第二开口。当紧固件被接纳在第一固定结构的安装板的所述一个或多个第一开口中时,第一操作员控制组件可以相对于第一支撑结构以第一角度取向定位。当从第一角度取向运动到第二角度取向时,第一操作员控制组件可以围绕与物料搬运车辆的纵向轴线大致平行的第一轴线旋转,使得当紧固件被接纳在所述一个或多个第二开口中时,第一操作员控制组件以第二角度取向安装。当紧固件被接纳在第二固定结构的安装板的所述一个或多个第一开口中时,第二操作员控制组件可以相对于第二支撑结构以第一角度取向定位。当从第一角度取向运动到第二角度取向时,第二操作员控制组件可以围绕与物料搬运车辆的纵向轴线大致平行的第二轴线旋转,使得当紧固件被接纳在所述一个或多个第二开口中时,第二操作员控制组件以第二角度取向安装。
第一壳体可以具有被第一支撑结构的弯曲上表面接纳的弯曲下表面,第二壳体可以具有被第二支撑结构的弯曲上表面接纳的弯曲下表面。
对于较窄宽度的车辆,第一操作员控制组件和第二操作员控制组件可以以第一角度取向定位,对于较宽宽度的车辆,第一操作员控制组件和第二操作员控制组件可以以第二角度取向定位。
根据本公开的第十四方面,提供了一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括操作员工位,该操作员工位具有大致水平的地板表面和支撑结构。操作员控制系统包括:操作员控制组件,其由支撑结构支撑;以及竖直调节组件,其联接到操作员控制组件,以相对于大致水平的地板表面将操作员控制组件选择性地支撑在支撑结构上的多个竖直位置处。操作员控制系统还包括以下特征中的至少一个:
壳体,其安装到支撑结构;以及转向组件,其用于使物料搬运车辆转向,该转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中。当处于第一位置时,转向控制结构大致以第一取向从基部结构延伸。当处于第二位置时,转向控制结构大致以第二取向从基部结构延伸,第二取向与第一取向不同;
固定结构,其联接到支撑结构,以相对于支撑结构以多个角度取向选择性地支撑操作员控制组件;或者
壳体,其安装到支撑结构,该壳体包括:凹部;第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在凹部上延伸;以及第一控制元件,其在凹部内安装到壳体,第一控制元件被配置为控制物料搬运车辆的功能。第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在所述至少一个抓握安装位置处安装到壳体并在凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置。
本公开的各个方面和实施例解决了与需要可调节的操作员控制相关的各种技术问题,以便为不同身高的操作员提供人体工程学定位并适应操作员偏好。本公开提供了第一技术方案,其涉及转向组件,该转向组件能够在至少两个位置之间运动并且能够锁定在每个位置中。可移动转向组件在各位置之间旋转,以允许快速且容易地进行调节,以适应不同的操作员身高,并提供使用灵活性,例如,基于操作员偏好、驾驶条件和/或要执行的任务进行调节。转向组件也独立于物料搬运车辆中的其它控制结构进行运动,以避免阻碍操作员舱室,并防止转向组件与操作员或其它物体之间的意外接触。另一技术方案涉及具有一个或多个可互换部件的操作员控制组件,可互换部件可以替换为具有不同尺寸和/或配置的对应部件,以确保人体工程学定位和对控制元件的更好的可触及性。这些部件可能在多个不同类型或型号的物料搬运车辆中通用。操作员控制组件还包括长形抓握构件,其在物料搬运车辆的操作期间为操作员提供稳定的抓握。另一技术方案涉及将操作员控制组件相对于支撑结构以两个或更多个角度取向进行定位,以便基于例如物料搬运车辆的宽度提供符合人体工程学的手部定位。又一技术方案涉及调节操作员控制组件的竖直位置,以便为不同的操作员提供操作员控制组件的人体工程学定位并适应操作员偏好。这些调节特征中的每一个可以单独使用,或者与一个或多个其它调节特征组合使用。本文阐述了其它技术问题和对应的解决方案。
附图说明
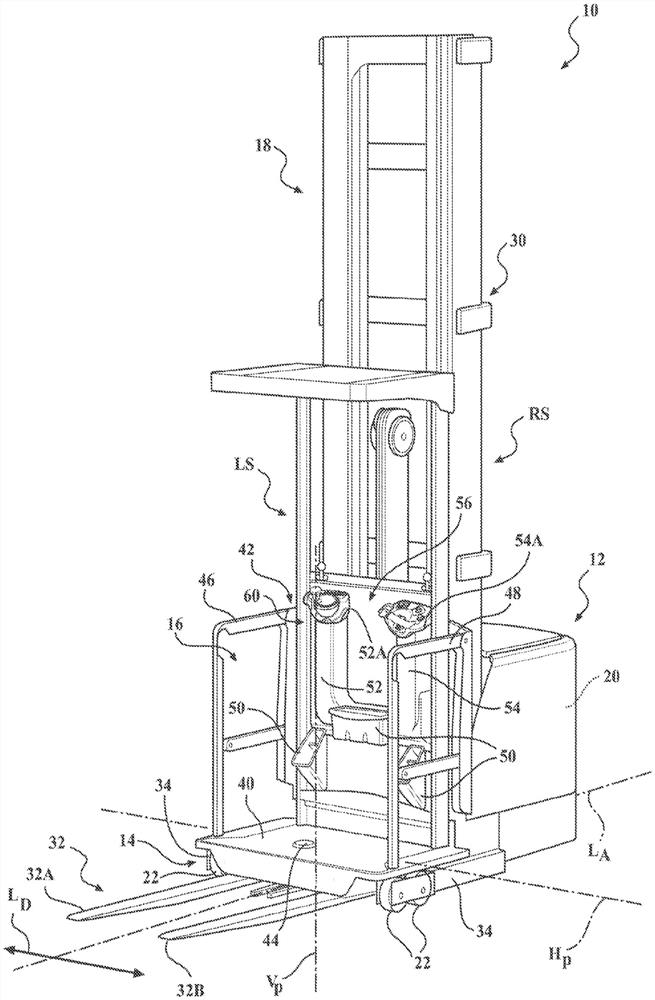
图1是根据实施例的包括操作员控制系统的物料搬运车辆的透视图;
图2是图1所示的操作员控制系统的前正视图;
图2A是根据实施例的操作员控制系统的后正视图;
图3是图2所示的操作员控制系统的操作员控制组件的透视图;
图3A是根据实施例的操作员控制组件的透视图;
图4和图5是图2所示的操作员控制系统的操作员控制组件的透视图;
图6-8是图3-6所示的操作员控制组件的剖视图;
图9是图2所示的操作员控制系统的另一个操作员控制组件的透视图;
图10A和10B是根据实施例的操作员控制组件的透视图;
图11A-11F是根据实施例的操作员控制组件的剖视图;
图12A和12B是图2所示的操作员控制系统的后正视图;
图13A-13D是图12A和12B的操作员控制系统的操作员控制组件的放大视图;
图14是根据实施例的操作员控制组件的透视图;
图15是根据实施例的包括平台组件、操作员控制组件和非水平观察窗口的物料搬运车辆的透视图;
图16是具有图15所示的非水平观察窗口的平台组件的后正视图;
图17是具有图15所示的非水平观察窗口的平台组件的后透视图;
图17A-17C是根据实施例的架空防护延伸部的透视图;
图18是示出为处于升高位置的、具有操作员舱室和非水平观察窗口的图15的物料搬运车辆的后正视图;
图19A是图15的物料搬运车辆的局部剖视图,示出了桅杆组件、非水平观察窗口以及它们之间的空间;
图19B是图19A的沿线19B-19B截取的剖视图,示出了桅杆组件、非水平观察窗口以及它们之间的空间;
图20是根据实施例的具有非水平观察窗口的图15所示的平台组件的局部前正视图;
图21是根据实施例的图20的沿线21-21截取的平台组件的剖视图;
图21A是从图21获取的放大视图;
图22是根据实施例的具有非水平观察窗口的平台组件的局部前正视图;
图23是根据实施例的图22的沿线23-23截取的平台组件的剖视图;
图23A是从图23获取的放大视图;
图24是从操作员角度看的局部俯视图,其中平台组件处于图25的升高位置,包括操作员通过观察窗口的一部分看到的放大视图;
图25是根据实施例的图15的物料搬运车辆的侧正视图,其中桅杆组件处于缩回位置,操作员舱室处于升高位置,示出了通过非水平观察窗口的视线;
图26是根据实施例的处于完全升高位置的图15的物料搬运车辆的侧正视图,示出了通过非水平观察窗口的视线;
图27是根据实施例的物料搬运车辆的透视图,其中平台组件还包括外支撑壁、外观察窗口和可相对于外支撑壁移动的叉架组件;
图28是根据实施例的从操作员舱室看的图27所示的平台组件的局部正视图,包括外支撑壁、外观察窗口和操作员控制组件;
图28A是图28的沿线28A-28A截取的剖视图,示出了可移动叉架组件;
图28B是图28的沿线28B-28B截取的剖视图,示出了可移动叉架组件处于升高的上部位置;
图29是图27的平台组件的局部仰视透视图,其中叉架组件处于降低位置,外支撑壁与地板分离;
图30是根据实施例的从操作员舱室看的包括外支撑壁、外观察窗口和操作员控制组件的平台组件的局部前正视图;
图31是根据实施例的示出为处于部分升高位置和完全升高位置的图27的物料搬运车辆的侧正视图,示出了通过外支撑壁中的非水平观察窗口的视线;
图32是图27的物料搬运车辆的详细俯视透视图,包括内部操作员控制系统和外部操作员控制系统;
图33是图32所示的内部操作员控制系统的前正视图;
图34和35是图33所示的操作员控制系统的后正视图;
图36是图33所示的一个操作员控制组件的前正视图,其中壳体的一部分被移除;
图37是用于调节图36的操作员控制组件的竖直位置的竖直调节组件的透视图;和
图38是图37所示的竖直调节组件的分解图。
具体实施方式
以下文本阐述了对本公开的许多不同实施例的广泛描述。该描述仅被解释为示例性的,并未描述每一个可能的实施例,因为描述每一个可能的实施例将是不切实际的,如果不是不可能的话,应该理解,本文所述的任何特征、特性、部件、组成、成分、产品、步骤或方法可以全部或部分删除、组合或替代本文所述的任何其它特征、特性、部件、组成、成分、产品、步骤或方法。应当理解,所描述和示出的实施例的多种组合是可以预期的,并且对一个实施例的特别关注不排除将其包括在其它描述的实施例的组合中。还可以使用当前技术或在本专利的申请日期之后开发的技术来实现许多替代实施例,这仍将落入权利要求的范围内。本文引用的所有出版物和专利均通过引用并入本文。
现在参考附图,图1示出了根据实施例构造的物料搬运车辆10。在所示实施例中,车辆10包括拣货机,但也可以是另一种类型的物料搬运车辆。车辆10包括动力单元12、具有操作员舱室16的平台组件14和负载搬运组件18。动力单元12包括电源,例如电池单元20。车辆10包括多个轮22,车辆10在其上行驶(一个或多个附加轮位于动力单元12下方,但未在图1中示出)。负载搬运组件18包括联接到动力单元12的桅杆组件30,平台组件14在该桅杆组件上沿竖向移动,并且该桅杆组件还包括具有一对叉32A、32B的叉结构32。桅杆组件30包括一个或多个桅杆部段。桅杆部段在本文中也可称为焊接件。图1中所示的示例性桅杆组件30是三级桅杆组件,其中与平台组件14附接的滑架经由联接到第三桅杆部段的初级柱塞/缸组件升高,直到其接触第三级桅杆部段的顶部,其中桅杆组件30的次级柱塞/缸组件中的液压压力导致第二级桅杆部段和第三级桅杆部段开始升高。第一级桅杆部段固定到动力单元12和用于保持轮22的一对支腿34。当第二级桅杆部段升高时,第三级桅杆部段将升高两倍的距离。
操作员舱室16包括地板表面40,当操作员从位于操作员舱室16中的操作员工位42操作车辆10时,操作员站立在该地板表面上。在地板表面40中设置有为压力开关形式的操作员存在传感器44,该压力开关感测操作员的脚。根据实施例,车辆的一个或多个功能,例如行进运动、升高/降低负载搬运组件18等,可以被禁用,除非操作员存在传感器指示操作员存在于操作员舱室16中。第一和第二侧约束装置46、48设置在操作员舱室16的相对的左侧LS和右侧RS处,左侧LS和左侧RS在垂直于车辆10的纵向轴线L
操作员工位42可以包括一个或多个箱50,操作员可以在其中存储物品。箱50可以位于操作员工位42中的任何位置,并且可以根据需要移动。操作员工位42还包括在横向方向L
操作员控制系统60设置在操作员工位42中。操作员使用操作员控制系统60来驱动车辆10,并控制一个或多个其它车辆功能,如本文将要更详细地描述的。参考图2,操作员控制系统60包括与第一支撑结构52相关联的第一操作员控制组件62和与第二支撑结构54相关联的第二操作员控制组件64。在所示实施例中,第一操作员控制组件62用来控制车辆10的转向,并且可选地用来控制附加的车辆功能,第二操作员控制组件64用来控制负载搬运组件的提升和降低功能并且可选地用来控制其它车辆功能,如本文将要更详细地描述的。
参考图2-5,第一操作员控制组件62包括第一壳体66,该第一壳体与第一支撑结构52分离,但经由紧固件、粘合剂等安装到第一支撑结构52,然而第一壳体66也可以与第一支撑结构52成一体,如图2A所示的替代实施例中所示。一个或多个控制元件68,例如按钮、开关、操纵杆等,可以设置在第一壳体66的控制元件区域70上,用于向车辆电子处理器或控制器生成控制信号,以控制车辆10的相应功能,包括例如灯、风扇等附件、功能超控、功能确认等,即,车辆处理器或控制器可以基于来自控制元件68的控制信号来控制车辆10的功能。控制元件区域70可以是如图2-5所示的大致平面的或者可以是非平面的,并且可以包括任意数量的控制元件或者不包括控制元件。
第一壳体66还包括承接部72或腔体,该承接部或腔体从控制元件区域70沿朝向操作员舱室16的地板表面40的方向向下延伸并向内延伸到第一壳体66中。承接部72可以具有半球形形状。
第一操作员控制组件62还包括用于使车辆10转向的转向组件80。转向组件80包括基部结构82和从基部结构82向外延伸的转向控制结构84。基部结构82包括基板86和联接到基板86的安装件88,其中转向控制结构84从基板86向外延伸。基板86可以具有大致圆形形状,并且可旋转地联接到安装件88,使得基板86可以相对于安装件88旋转。车辆10的转向由操作员使用转向控制结构84使基板86相对于底座88旋转来完成,即,车辆处理器或控制器可以基于来自转向组件80的控制信号来控制车辆10的转向马达,以设定车辆10的转向角度。基板86可以可选地包括围绕其周边的多个凹口90。操作员可以用一个或多个手指接合一个或多个凹口90,以使基板86相对于安装件88旋转,从而使车辆10转向。
转向控制结构84可以包括如图1-6所示的旋钮(图3A示出了根据实施例的为较小旋钮形式的转向控制结构84),然而转向控制结构84也可以具有任何合适的形状和配置。在所示的示例性实施例中,转向控制结构84包括联接到旋钮的主体84A的外表面的多个抓握元件92。抓握元件92可以粘附地固定到旋钮的主体84A的外表面,或者安装在旋钮的主体84A内的对应凹部内。抓握元件92可以由与主体84A不同的聚合物材料形成,例如热塑性弹性体(TPE),其在使用转向组件80操纵车辆10的转向期间增强了操作员和旋钮之间的抓握。转向控制结构84可以可旋转地安装到基板86,使得转向控制结构84可以相对于基板86旋转。根据该方面,由于转向控制结构84相对于基板86旋转并且基板86相对于安装件88旋转,因此操作员不需要在使用转向控制结构84使车辆10转向的同时松开转向控制结构84。
如图3-6所示,安装件88接纳在第一壳体66的承接部72中,并且可以具有与承接部72的半球形形状相对应的半球形形状。安装件88可以经由一对横向间隔开的枢轴支撑件或销100A、100B固定到第一壳体66,参见图6。枢轴支撑件100A、100B允许转向组件80相对于第一壳体66可枢转地旋转,使得转向组件80可相对于第一壳体66移动并且可定位在多个不同位置中。根据一个示例性实施例,转向组件80可以在第一和第二位置之间运动,并且可以经由锁定组件104锁定在这两个位置,这将在下文中描述。
当处于图2、图3和图5-7所示的第一位置时,转向控制结构84大致以第一取向从基部结构82延伸。在第一取向中,转向控制结构84相对于第一竖直平面V
参考图6-8,锁定组件104包括锁定释放结构110,该锁定释放结构具有致动部分112,该致动部分由操作员致动以解锁锁定组件104,使得转向组件80可以在其多个位置之间运动。在所示实施例中,当操作员按压致动部分112时,锁定释放结构110的锁定突起114从形成在安装件88中的相应锁定槽116A或116B撤回到释放位置,其中每个锁定槽116A、116B对应于转向组件80的对应位置。在具有上述第一和第二转向组件位置的所示实施例中,安装件88包括两个锁定槽116A和116B,一个锁定槽116对应于转向组件80的第一位置,另一个锁定槽116B对应于转向组件80的第二位置。如果需要更多的转向组件位置,安装件88可以包括额外的锁定槽,以将转向组件80锁定在不同的位置。当锁定突起114从锁定槽116A或116B中撤回时,即当锁定组件104移动到释放位置时,允许转向组件80相对于安装件88的枢转运动,并且当锁定突起114插入到锁定槽116A或116B中时,即当锁定组件104处于锁定位置时,阻止转向组件80相对于安装件88的枢转运动。图7示出了锁定组件104处于锁定位置,其中转向组件80处于第一位置,图8示出锁定组件104位于锁定位置,其中转向组件80处于第二位置。
锁定组件104还可以包括弹簧118,该弹簧将锁定释放结构110朝向锁定位置偏置,使得在锁定突起114与锁定槽116A或116B正确对齐的情况下,锁定突起114插入到锁定槽116A或116B中。
锁定组件104可以另外包括传感器120,例如卡扣动作微动开关传感器,用于感测转向组件80是否处于第一或第二锁定位置之一或者是否处于释放位置。传感器120可以例如通过感测锁定组件104是处于释放位置还是锁定位置或者通过感测锁定释放结构110上的表面来起作用。例如当锁定释放结构110的锁定突起114已经从锁定槽116A和116B中的一个移出而使得锁定突起114可能与安装件88到外表面88A接合时,传感器120将感测到锁定释放结构110处于其释放位置,并向车辆电子处理器或控制器提供对应信号。如果传感器120检测到转向组件80未锁定在第一或第二位置中的一个位置,则车辆10的一个或多个功能(例如行进运动、升高/降低负载搬运组件18等)可由车辆处理器或控制器禁用。
转向组件80可以独立于第一支撑结构52和第一壳体66运动,这有助于保持操作员舱室16没有阻碍,并防止操作员控制组件62与操作员或其它物体之间的意外接触,特别是当转向组件80处于第二位置时。例如,当转向组件80围绕枢轴支撑件100A、100B从第一位置(如图3和5-7所示)枢转到第二位置(如3A、4和8所示)时,可以看到只有转向组件80运动。与转向组件80处于第二位置时相比,当转向组件80位于第一位置时,第一支撑结构52和第一壳体66保持在相同的位置,使得这些结构不会突出到操作员舱室16中。此外,由于转向组件80独立于第一壳体66的控制元件区域70而运动,因此与转向组件80处于第二位置时相比,当转向组件80位于第一位置时,控制元件区域70相对于第一支撑结构52的取向是相同的,使得操作员在操作车辆10时更容易利用控制元件区域70。
现在转到图9,第二操作员控制组件64包括第二壳体130,该第二壳体与第二支撑结构54分离,但经由紧固件、粘合剂等安装到第二支撑结构54(参见图2),然而第二壳体130也可以与第二支撑结构54成一体,如图2A所示的替代实施例所示。一个或多个控制元件132,例如按钮、开关、操纵杆等,可以设置在第二壳体130的控制元件区域134上,用于向车辆处理器或控制器生成控制信号,以控制车辆10的相应功能,例如喇叭、紧急停止、交互式显示器的控制等,即,车辆处理器或控制器可以基于来自控制元件132的控制信号来控制车辆10的功能。控制元件区域134可以包括任意数量的控制元件或者不包括控制元件。
第二操作员控制组件64还包括壳体凹部140,该壳体凹部从控制元件区域134沿朝向操作员舱室16的地板表面40的方向向下延伸。壳体凹部140可以具有曲线形状。
第二操作员控制组件64的控制元件142安装到第二壳体130,并从壳体凹部140向外延伸。在所示实施例中,控制元件142包括基部部分144和从基部部分144延伸的开关或操纵杆146。控制元件142向车辆处理器或控制器生成对应的控制信号,以控制负载搬运组件18的提升和降低功能,然而控制元件142也可以根据需要用于其它功能。控制元件142可以定位在包括两个端部位置的多个位置中,并且两个端部位置中的第一个端部位置包括控制元件142被向前推动直到其到达第一停止极限的位置,两个端部位置中的第二个端部位置包括控制元件142被向后拉动直到其到达第二停止极限的位置。控制元件142还可以定位在两个端部位置之间的其它位置中,包括默认位置,其中当控制元件142没有被朝向两个端部位置之一推动或拉动时,控制元件可以定位在默认位置。
第二操作员控制组件64还包括安装到第二壳体130并在壳体凹部140之上延伸的长形抓握构件150。抓握构件150在靠近壳体凹部140的至少一个抓握安装位置安装到第二壳体130。在所示实施例中,抓握构件150在位于壳体凹部140的相对横向侧上的第一和第二抓握安装位置152A、152B处固定地安装到第二壳体130。当操作员驾驶车辆10时和/或当操作员操作控制元件142时,抓握构件150可以由操作员的手抓握。
如图9所示,在控制元件142的最靠近抓握构件150的表面和抓握构件150的最靠近控制元件142的表面之间限定了间隙G。间隙G始终优选在从最小间隙距离到最大到达距离的范围内。也就是说,无论控制元件142位于第一端部位置、第二端部位置、默认位置或这些限定位置之间的任何位置,间隙G优选地总是在该范围内。该范围被选择为使得当控制元件142处于任何位置时,操作员的手指不会被夹在控制元件142和抓握构件150之间,即,间隙G大于或等于最小间隙距离,但是还使得在抓握该抓握构件150时控制元件142在任何位置都处于操作员的手指可及范围内,即间隙G小于或等于最大到达距离。根据一个非限制性示例性工作实施例,最小间隙距离可以为大约15mm,最大到达距离可以为大约50mm,并且根据另一个非限定性示例性工作实施例,最小间隙距离可以为大约30mm,最大到达距离可以为大约40mm,然而这些值可能不同于所提供的示例性值,例如,当车辆10预期由戴厚手套的操作员使用时,在这种情况下,这些值可能大于所提供的示例性值。
根据一个实施例,第一(或原始)控制元件142和/或抓握构件150中的一个或两个可以被移除,并替换为第二(或替换)控制元件和/或抓握构件,同时间隙G保持在最小间隙距离和最大到达距离之间的范围内,而不管原始部件或替换部件是否就位。替换控制元件和/或替换抓握构件可以具有与原始(替换的)控制元件142和/或抓握构件150不同的尺寸和/或不同的构造。图10A至11F说明了这个方面。
在图10A和11A-11C的第一实施例中,第二操作员控制组件64包括原始控制元件142和原始抓握构件150,这里也称为第一控制元件142以及第一抓握构件150。图11A示出了处于第一端部位置的第一控制元件142,图11B示出了处于第二端部位置的第一控制元件142,图11C示出了处于默认位置的第一控制元件142。当第一控制元件142处于图11A所示的第一端部位置时,间隙G是大于最小间隙距离的第一距离(图11A中描述为MCD)。当第一控制元件142处于图11B所示的第二端部位置时,间隙G是小于最大到达距离的第二距离(图11B中描绘为MRD)。当第一控制元件142处于图11C所示的默认位置时,间隙G是第一和第二距离中间的第三距离。
在图10B和11D-11F的第二实施例中,第二操作员控制组件64包括替换控制元件142′和替换抓握构件150′,在本文中也称为第二控制元件142′和第二抓握构件150′。第二控制元件142′和第二抓握构件150′中的每一个都具有与第一控制元件142和第一抓握构件150不同的尺寸和/或不同的构造中的至少一者。图11D示出了处于第一端部位置的第二控制元件142′,图11E示出了处于第二端部位置的第二控制元件142′,图11F示出了处于默认位置的第二控制元件142′。当第二控制元件142′处于图11D所示的第一端部位置时,间隙G是大于最小间隙距离的第一距离(图11D中描述为MCD′)。当第二控制元件142′处于图11E所示的第二端部位置时,间隙G是小于最大到达距离的第二距离(图11E中描述为MRD′)。当第二控制元件142′处于图11F所示的默认位置时,间隙G是第一和第二距离中间的第三距离。
第一控制元件142或第一抓握构件150中的一个也可以与第二控制元件142′或第二抓握构件150′中的一个一起使用,其中两个安装部件总是彼此间隔开,使得间隙G大于或等于最小间隙距离并且小于或等于最大到达距离。还可以安装具有与第一和第二控制元件142、142′和抓握构件150、150′不同的尺寸和/或构造中的至少一者的附加替换控制元件和/或抓握构件(未具体示出),其中两个安装部件总是彼此间隔开,使得间隙G大于或等于最小间隙距离并且小于或等于最大到达距离。壳体凹部140的曲线形状参与允许使用不同的控制元件,同时将间隙G保持在上述范围内,因为曲线形状至少部分地设定了安装的控制元件相对于抓握构件的角度。也就是,将控制元件沿着壳体凹部140的曲线形状的弯曲表面定位在不同位置和/或使用具有不同尺寸和/或构造的控制元件基部部分,将改变控制元件相对于抓握构件的角度。
抓握构件150(和/或替换抓握构件)可以包括如图2、9、10A和10B所示的附加控制元件160。附加控制元件160可以向车辆处理器或控制器生成控制信号,以控制车辆功能,例如车辆10的行进方向,即,车辆处理器或处理器可以基于来自控制元件160的控制信号来控制车辆10的牵引马达,以设定车辆10的行进方向。
现在转到图12A和12B,操作员控制系统60可以可选地包括第一和第二固定结构180、182,以选择性地允许第一和/或第二操作员控制组件62、64中的一个或两个定位在多个相应位置。第一固定结构180和第二固定结构182可以与相应的第一支撑结构52和第二支撑结构54联接或成一体。
第一固定结构180包括安装板184,该安装板与第一支撑结构52联接或成一体。安装板184可以是在竖直方向上从第一支撑结构52延伸到第一操作员控制组件62的第一壳体66的长形板。参考图13A和图13B,第一固定结构180还包括多个紧固件186,例如螺栓,其选择性地延伸穿过设置在安装板184中的第一开口188A或第二开口188B,并延伸到形成在第一壳体66的背侧中的对应开口190中,以将第一壳体66联接到第一支撑结构52。通过将紧固件186穿过安装板184中的第一开口188A插入到第一壳体66中的开口190中,第一固定结构180可以相对于第一支撑结构52以第一取向支撑第一操作员控制组件62,如图12B和13B所示,或者通过将紧固件186穿过安装板184中的第二开口188B插入到第一壳体66中的开口190中,第一固定结构180可以相对于第一支撑结构52以第二取向支撑第一操作员控制组件62,该第二取向不同于第一取向,如图12A和13A所示。当处于第一取向时,第一操作员控制组件62相对于第一支撑结构52以第一角度取向定位,而当处于第二取向时,第一操作员控制组件62相对于第一支撑结构52以与第一角度取向不同的第二角度取向定位。当从第一角度取向运动到第二角度取向时,第一操作员控制组件62围绕第一轴线A
如图2所示,根据本实施例的第一支撑结构52的上表面52A可以是弯曲上表面52A,其对应于第一壳体66的弯曲下表面66A。对应的弯曲表面52A、66A允许第一操作员控制组件62在第一和第二取向之间运动,同时保持第一支撑结构52和第一壳体66之间的紧密配合。
返回参考图12A和12B,第二固定结构182包括安装板204,该安装板与第二支撑结构54联接或成一体。安装板204可以是在竖直方向上从第二支撑结构54延伸到第二操作员控制组件64的第二壳体130的长形板。参考图13C和13D,第二固定结构182还包括多个紧固件206,例如螺栓,其选择性地延伸穿过设置在安装板204中的第一开口208A或第二开口208B,并延伸到形成在第二壳体130的背侧中的对应开口210中,以将第二壳体130联接到第二支撑结构54。通过将紧固件206穿过安装板204中的第一开口208A插入到第二壳体130中的开口210中,第二固定结构182可以相对于第二支撑结构54以第一取向支撑第二操作员控制组件64,如图12B和13D所示,或者通过将紧固件206穿过安装板204中的第二开口208B插入到第二壳体130中的开口210中,第二固定结构182可以相对于第二支撑结构54以第二取向支撑第二操作员控制组件64,该第二取向不同于第一取向,如图12A和13C所示。当处于第一取向时,第二操作员控制组件64相对于第二支撑结构54以第一角度取向定位,而当处于第二取向时,第二操作员控制组件64相对于第二支撑结构54以与第一角度取向不同的第二角度取向定位。当从第一角度取向运动到第二角度取向时,第二操作员控制组件64围绕第二轴线A
第一支撑结构52和第二支撑结构54可以在窄宽度车辆(例如宽度等于或小于40英寸的车辆)中彼此靠近地定位,并且在宽宽度车辆(例如宽度等于或大于42英寸的车辆)中彼此远离地定位。为了为较窄宽度的车辆提供优选的符合人体工程学的手部定位,第一操作员控制组件62可以以第一角度取向定位(如图12B所示),为了为较宽宽度的车辆提供优选的符合人体工程学的手部定位,第一操作人员控制组件62可以以第二角度取向定位(图12A所示)。
如图2所示,根据本实施例的第二支撑结构54的上表面54A可以是弯曲上表面54A,其对应于第二壳体130的弯曲下表面130A。对应的弯曲表面54A、130A允许第二操作员控制组件64在第一和第二取向之间运动,同时保持第二支撑结构54和第二壳体130之间的紧密配合。
图14示出了根据附加实施例的第二操作员控制组件64。根据图14的第二操作员控制组件64包括第二壳体130以及一个或多个控制元件132,例如按钮、开关、操纵杆等,其设置在第二壳体130的控制元件区域134上,用于向车辆处理器或控制器生成控制信号,以控制车辆10的相应功能,例如紧急停止、交互式显示器的控制等,即,车辆处理器或控制器可以基于来自控制元件132的控制信号来控制车辆的功能。控制元件区域134可以包括任意数量的控制元件或者不包括控制元件。
操作员控制组件64还包括壳体凹部140,该壳体凹部从控制元件区域134沿朝向操作员舱室16的地板表面40的方向向下延伸。壳体凹部140可以具有曲线形状。如图14所示,在本实施例中,倒角表面141围绕壳体凹部140的外周边在壳体凹部140和控制元件区域134之间延伸。倒角表面141可以允许增加的操作员空间,以到达安装到第二壳体130并从壳体凹部140向外延伸的控制元件142。与上面针对图9描述的控制元件142相比,控制元件142可以具有远离基部部分144的扩大的末端部分142A,但是该控制元件也可以与上面针对图9描述的控制元件142相同或相似,在此不再详细描述。
根据本实施例的长形抓握构件150可以与上面针对图9描述的抓握构件150相同或类似,但是图14的抓握构件150可以包括位于其上的附加控制元件151,例如喇叭按钮。
现在参考图15-31,图15示出了根据实施例构造的物料搬运车辆310。在所示实施例中,车辆310包括拣货机,但也可以是另一种类型的物料搬运车辆。车辆310包括动力单元312、具有操作员舱室316的平台组件314和负载搬运组件318。动力单元312包括电源,例如电池单元320。车辆310包括多个轮322,车辆310在其上行驶(一个或多个附加轮位于动力单元312下方,但未在图15中示出)。负载搬运组件318包括联接到动力单元312的桅杆组件330,平台组件314在该桅杆组件上沿竖向移动。叉结构332包括一对叉332A、332B,这些叉联接到平台组件314或桅杆组件330以与平台组件314一起运动。桅杆组件330包括一个或多个桅杆部段。桅杆部段在本文中也可称为桅杆焊接件。图15所示的示例性桅杆组件330是三级桅杆组件,包括第一、第二和第三桅杆部段或焊接件330A-330C,也参见图19A。平台组件314经由具有滚轮(图17中仅示出了滚轮安装在其上的支柱)的滑架314B附接到第三桅杆部段或焊接件330C并相对于第三桅杆部段或焊接件运动,参见图17,滑架314B形成平台组件314的一部分,并通过安装到第三部段的初级提升柱塞/缸组件326进行提升。第二和第三桅杆部段或焊接件330B和330C相对于第一静止桅杆部段或焊接件330A运动。一个或多个液压次级提升柱塞/缸组件在其缸基部处固定到动力单元312或第一桅杆部段330A,并且柱塞固定到第二桅杆部段330B。链条在第一端处联接到每个次级提升柱塞/缸组件的缸或联接到第一桅杆部段,在第二桅杆部段330B上的对应滑轮上延伸,并在其第二端处固定到第三桅杆部段330C。当每个柱塞延伸时,柱塞使第二桅杆部段330B相对于第一桅杆部段330A运动,并且还使第三桅杆部段330C经由链条相对于第一桅杆部段330A和第二桅杆部段330B运动。当第二桅杆部段330B升高时,第三桅杆部段330C升高两倍的距离。桅杆组件300在图15和图25中示出为处于其完全缩回原始位置,在图26中示出为处于其完全延伸状态。平台组件314在图15中定位在其完全缩回状态。当第二和第三桅杆部段330B和330C完全缩回并且平台组件314完全缩回时,第一、第二和第三桅杆部段330A-330C中的每一个的上部部分331A-331C在平台组件314的上部部分314A上方延伸,参见图15。此外,当第二和第三桅杆部段330B和330C完全缩回并且平台组件314完全缩回时,第一、第二和第三桅杆部段330A-330C中的每一个的上部部分331A-331C在第一操作员控制组件362的上部部分362A和/或第二操作员控制组件364的上部部分364A上方延伸,参见图15和20。
操作员舱室316包括地板表面340,当操作员从位于操作员舱室316中的操作员工位342操作车辆310时,操作员站立在该地板表面上。在地板表面340中设置有为压力开关形式的操作员存在传感器344,该压力开关感测操作员的脚。地板表面340在此也可以称为地板。根据实施例,车辆的一个或多个功能,例如行进运动、升高/降低负载搬运组件318等,可以被禁用,除非操作员存在传感器指示操作员存在于操作员舱室316中。第一和第二侧约束装置346、348设置在操作员舱室316的相对的左侧LS’和右侧RS’处,左侧LS’和左侧RS’在垂直于车辆310的纵向轴线L
操作员工位342可以包括一个或多个箱350,操作员可以在其中存储物品。箱350可以位于操作员工位342中的任何位置,并且可以根据需要移动。操作员工位342还可以包括在横向方向L
操作员控制系统360设置在操作员工位342中。操作员使用操作员控制系统360来驱动车辆310并控制一个或多个其它车辆功能。参考图15,操作员控制系统360包括与第一支撑结构352相关联的第一操作员控制组件362和与第二支撑结构354相关联的第二操作员控制组件364。在所示实施例中,第一操作员控制组件362用来控制车辆310的转向,并且可选地控制附加的车辆功能,第二操作员控制组件364用来控制负载搬运组件的提升和降低功能、方向和速度控制以及可选的其它车辆功能。如在实施例中进一步示出的,第一操作员控制组件362和第二操作员控制组件364联接到支撑壁324,并且定位成允许位于操作员舱室316内的操作员进行操作。
在支撑壁324中设置有包括上端402A和下端402B的非水平观察窗口402,其也可以被称为“中间窗口”或“第一观察窗口”,其中下端402B延伸或定位在第一操作员控制组件362的下部部分362B下方和/或第二操作员控制组件364的下部部分364B下方,以使操作员的向下观察最大化,参见图15和20。在所示实施例中,非水平观察窗口402可以位于第一操作员控制组件362和第二操作员控制组件364之间。观察窗口上端402A可以位于第一操作员控制组件362的上部部分362A和/或第二操作员控制组件364的上部部分364A的下方、与之齐平或在其上方延伸。
术语“非水平”意味着观察窗口402具有大于水平尺寸的竖直尺寸。在一些实施例中,非水平观察窗口402的竖直尺寸H
在图15-31所示的实施例中,非水平观察窗口402的宽度W
在图20的实施例中,非水平观察窗口402可以包括合适材料的透明窗格406,例如透明聚合物、玻璃、网状增强玻璃、或者如图22的实施例所示的透视屏幕408。
支撑壁324和非水平观察窗口402在平台组件314中处于大致竖直取向。非水平观察窗口402如图21和23所示,位于第一竖直平面P
虽然图中未示出,但可以理解,在一些实施例中,非水平观察窗口402和支撑壁324的相邻部分也可以在观察窗口下端402B处远离桅杆组件330成角度,并且略微突出到操作员舱室316的凹入部分356中,以增强通过非水平观察窗口402进行观察的容易性,尤其是对于包括如图22所示的透视屏幕408的实施例而言。在非水平观察窗口402的下端402B下方,支撑壁324可以朝向第一竖直平面P
图19A和19B说明了非水平观察窗口402、支撑壁324和桅杆组件330之间的关系。第三桅杆部段或桅杆焊接件330C的内边缘430,即最靠近观察窗口402的桅杆组件330的边缘,限定了内桅杆组件竖直平面P
参考图25和26,物料搬运车辆310的操作员可以沿着视线F
如图15的实施例所示,物料搬运车辆310可以包括位于非水平观察窗口402上方的第二观察窗口422。参考图20-23,第二观察窗口422的内表面422A位于第二大致竖直平面P
再次参考图25和图26,物料搬运车辆310的操作员可以通过第二观察窗口422的下部部分沿着视线F
如图15所示,平台组件314的上部部段314A还包括位于操作员舱室316上方的架空防护组件500。架空防护组件500包括基部框架502,该基部框架包括第一和第二侧杆构件502A、502B、前杆构件502C和后杆构件502D,也参见图16和17。杆构件502A、502B、502C、502D可以单独形成并例如通过焊接或螺栓连接在一起,或者一个或多个杆构件502A、502B、502C、502D可以作为单个结构整体上一起形成。根据一个示例性实施例,第一、第二和前杆构件502A、502B、502C一体地形成为连接到后杆构件502D的单个结构。一个或多个横跨构件(未示出)可以横跨在第一和第二侧杆构件502A、502B或者前杆构件502C和后杆构件502D之间,以将由基部框架502限定的中心开口502E分隔成更小的部段。根据另一实施例,可以使用透明窗口(未示出)来代替横跨构件,以允许操作员舱室316中的操作员通过中心开口502E进行仰视。
架空防护组件500还可以包括从相应的第一和第二侧杆构件502A、502B横向延伸的第一延伸构件504A和第二延伸构件504B。延伸构件504A、504B增加了架空防护组件500的横向宽度L
图17A-17C示出了根据附加实施例的具有不同横向宽度的第一和第二延伸构件504A、504B。根据一个方面,选择成用于特定车辆310上的第一和第二延伸构件504A、504B可以基于操作员舱室316的地板表面340(参见图15)的横向宽度L
现在参考图27-30,示出了物料搬运车辆510的其它实施例。如图27所示,车辆510可以包括动力单元512、平台组件514和带有桅杆组件530的负载搬运组件518,其可与本文所述的车辆10和310基本相似。操作员舱室516可以至少部分地由内支撑壁524、地板540和外支撑壁640限定,内支撑壁包括内观察窗口402,地板限定车辆510的大致水平地板表面,其中外支撑壁640连接到地板540并与内支撑壁524相对。第一和第二侧约束装置546、548设置在车辆510的两侧上。如图27所示,第一操作员控制系统560(本文中也称为内部操作员控制系统)联接到内支撑壁524,并且可以包括第一内部操作员控制组件562和第二内部操作员控制组件564。如图28和图30所示,第二操作员控制系统660(本文中也称为外部操作员控制系统)联接到外支撑壁640,并且可以包括第一外部操作员控制组件662和第二外部操作员控制组件664。第一和第二操作员控制系统560和660被定位成允许位于车辆510的操作员舱516内的操作员进行操作,如本文更详细地描述的。
在图27-30的实施例中,至少一个外观察窗口442或444位于外支撑壁640中。第一外观察窗口442和第二外观察窗口444位于外部操作员控制系统660的操作员控制组件662、664的下方,并横向隔开距离D
如图27、28A和28B所示,叉架组件470联接到外支撑壁640,并且包括第一和第二叉470A和470B以及可移动叉架471,叉470A和470B联接到可移动叉架,以与可移动叉架471一起运动。柱塞/缸组件474用于使叉架471以及叉470A和470B相对于外支撑壁640竖直地移动。叉架471包括滚轮472,滚轮在形成外支撑壁640一部分的轨道642内运动,参见图28A。柱塞/缸组件474的缸474A固定到外支撑壁640的基部构件644,参见图28和29。柱塞/缸组件474的柱塞474B可以固定到叉架组件470,使得柱塞474B的运动影响叉架组件470的运动。可替换地,链条(未示出)可以在一端固定到缸474A,并且在第二端固定到叉架组件470。滚轮可以固定到柱塞474B的一端,该滚轮与链条接合以实现叉架组件470的提升。当叉架组件470升高至上部位置时,参见图28B,叉470A和470B定位成使得操作员可以通过第一和第二外观察窗口442和444向下观察叉的下方。
参考图31,物料搬运车辆510的操作员可以沿着视线R
参考图32-38,将更详细地描述图27-31的物料搬运车辆510的内部和外部操作员控制系统560、660(移除侧约束装置546、548以详细说明其它方面)。当操作图32所示的车辆510时,操作员在第一操作员工位542(本文中也称为内部操作员工位)或第二操作员工位543(本文也称为外部操作员工位)之一处站在操作员舱室516中的地板540上。操作员存在传感器544(例如,压力开关)设置在地板540中并感测操作员的脚。如本文所述,车辆的一个或多个功能可以被禁用,除非操作员存在传感器544指示操作员在操作员舱室516中的存在。
继续参考图32,内部操作员工位542可以基本上类似于本文所述的操作员工位42、342,并且可以包括第一支撑结构552和第二支撑结构554。第一支撑结构552和第二支撑结构554可以在垂直于车辆510的纵向轴线L
内部操作员控制系统560包括第一和第二操作员控制组件562、564,它们设置在内部操作员工位542处,并且联接到内支撑壁524,以允许位于内部操作员工位542处的操作员进行操作,例如,允许面向内支撑壁524的操作员进行操作。第一和第二操作员控制组件562、564用于驱动车辆510并控制一个或多个其它车辆功能,如本文中详细描述的。在所示的实施例中,第一操作员控制组件562用来控制车辆510的转向,并且可选地控制附加的车辆功能,第二操作员控制组件564用来控制车辆510的行进方向、负载搬运组件的提升和降低功能以及可选地用来控制其它车辆功能,如上文关于第一和第二操作员控制组件62、64更详细描述的。
参考图33和36,如本文所述,第一操作员控制组件562可以基本上类似于第一操作员控制组件62。第一操作员控制组件562与第一支撑结构552相关联,并且包括第一壳体566,该第一壳体可以与第一支撑结构552分离,但通过紧固件、粘合剂等安装到第一支撑结构。在其它示例中,第一壳体566可以与第一支撑结构552的一部分成一体(参见图2A)。第一操作员控制组件562还包括转向组件580。如本文中关于第一操作员控制组件62和转向组件80详细描述的,转向组件580可在第一位置(如图33所示)和第二位置(如图36所示)之间运动,并且可以经由锁定组件(未标记)锁定在这两个位置中。
参考图33,如本文所述,第二操作员控制组件564可以基本上类似于第二操作员控制组件64。第二操作员控制组件564与第二支撑结构554相关联,并且包括第二壳体582,该第二壳体可以与第二支撑结构554分离,但通过紧固件、粘合剂等安装到第二支撑结构。在其它示例中,第二壳体582可以与第二支撑结构554成一体(参见图2A)。第二操作员控制组件564包括:壳体凹部646,其在朝向操作员舱室516的地板540的方向上向下延伸(参见图32);控制元件648,其安装到第二壳体582并从壳体凹部646向外延伸;以及长形抓握构件650,其安装到第二壳体582并在壳体凹部646上延伸。控制元件648和长形抓握构件650可以基本上类似于第二操作员控制组件64的控制元件142和长形抓握构件150,并且控制元件648和长形抓握构件650中的一个或两个可以被移除并替换为具有与原始(替换的)控制元件648和/或长形抓握构件650不同的尺寸和/或不同的构造的替换控制元件和/或替换抓握构件(未示出)(参见图10A-11F)。
类似于第一和第二操作员控制组件62、64,第一和第二操作员控制组件562、564可以可选地安装到第一和第二支撑结构552、554,以允许第一和/或第二操作员控制组件562和564相对于第一和第二支撑结构552、554定位在多个相应的位置。参考图34,第一和第二操作员控制组件562、564可以包括相应的第一和第二固定结构680、682,例如安装板684、704,其可以基本上类似于分别与第一和第二操作员控制组件62、64相关联的安装板184、204。如本文所述,安装板684、704可以相对于第一和第二支撑结构552、554以相应的第一和第二角度取向支撑第一和第二操作员控制组件562、564(参见图12A-13D)。同样如本文所述,第一支撑结构552和第二支撑结构554可以在窄宽度车辆中彼此靠近定位,而在宽宽度车辆中相互远离定位。第一和第二操作员控制组件562、564中的一个或两个的角度取向可以被选择成为较窄宽度车辆或较宽宽度车辆提供优选的人体工程学手部定位。
替代地或附加地,第一和第二操作员控制组件562、564相对于地板540(例如,在基本上平行于图1中所示的竖直平面V
图33中的第一操作员控制组件562和可移动壳体部分552B用实线表示处于降低位置,处于升高位置的第一操作员控制组件562和可移动壳体部分552B的轮廓用虚线表示。第二操作员控制组件564和可移动壳体部分554B用于实线表示处于升高位置,处于降低位置的第二操作员控制组件564的轮廓和可移动壳体部分554B的轮廓用虚线表示。如本文更详细地描述的,第一操作员控制组件562可以固定地联接到可移动壳体部分552B,使得第一操作员控制组件562和可移动壳体部分552B一起移动,并且第二操作员控制组件564可以类似地固定联接到可移动壳体部分554B,使得第二操作员控制组件564和可移动壳体部分554B一起移动。第一和第二操作员控制组件562、564均可以在相应的升高和降低位置之间连续移动,以允许第一和第二操作员控制组件562、564布置在期望的竖直位置处。当在降低位置和升高位置之间移动时,第一操作员控制组件562和可移动壳体部分552B可以移动距离D
参考图36-38,示出了用于在多个竖直位置选择性地支撑第一操作员控制组件562的第一竖直调节组件800。第一竖直调节组件800联接到第一操作员控制组件562,以提供第一操作员控制组件562在箭头A所示的竖直方向上相对于地板540(参见图32)和相对于固定壳体部分552A的运动。第一竖直调节组件800可以包括第一安装板802,该第一安装板将第一竖直调节组件800固定地联接到内支撑壁524。例如,第一安装板802可以包括多个开口804和多个紧固件806,例如螺栓,紧固件延伸穿过开口804并且被接纳在形成于内支撑壁524中的对应开口(未示出)中,以将第一安装板802附接到内支撑壁524。在其它示例中,第一安装板802可以焊接或以其它方式附接到内支撑壁524。
第一竖直调节组件800还可以包括联接到第一安装板802的轨道构件808。例如,诸如螺栓的多个紧固件812可以延伸穿过形成在第一安装板802中的多个开口814,并且可以被接纳在形成于轨道构件808中的对应开口810中,以将轨道构件808附接到第一安装板802。在其它示例中,轨道构件808可以焊接或以其它方式附接到第一安装板802。
继续参考图36-38,第一操作员控制组件562的固定结构680,即安装板684,可以经由滑架组件816联接到第一安装板802和轨道构件808。例如,安装板684可以包括多个开口820,多个紧固件818可以延伸穿过开口820并且可以被接纳在形成于滑架组件816中的对应开口822中,以将安装板684联接到滑架组件816。滑架组件816可以经由多个线性支承块824可移动地联接到轨道构件808。线性支承块824可以经由多个紧固件826联接到滑架组件816,紧固件延伸穿过形成于滑架组件816中的多个开口828并且接纳在形成于线性支承块824中的对应开口830中。如本文更详细地描述的,线性支承块824沿着轨道构件808竖直地滑动,以实现滑架组件816的竖直运动。
在所示的实施例中,轨道构件808包括第一和第二轨道808A、808B,滑架组件816包括四个线性支承块824。第一对线性支承块824接合第一轨道808A,第二对线性支承块824接合第二轨道808B。在其它示例(未示出)中,轨道构件808可以包括单个轨道或者三个或更多个轨道,并且线性支承块824的数量可以根据需要改变,以实现滑架组件816和轨道部件808之间的稳定联接。在第一操作员控制组件562和车辆电子处理器或控制器之间延伸的电缆、电线等(未示出)向电子处理器/控制器提供控制信号以控制车辆510的相应功能。滑架组件816可以可选地包括一个或多个电缆引导件878,其固定电缆并防止它们干扰第一操作员控制组件562的竖直运动。
第一安装板802可以联接到第一支撑结构552的固定壳体部分552A。例如,如图36-38所示,第一安装板802可以包括一个或多个延伸部864,延伸部中形成有开口866。紧固件868延伸穿过间隔件870并接纳在开口866中。间隔件870围绕紧固件868,在将紧固件868接纳在开口866中时,间隔件870可以从第一安装板802的内表面(未标记)向外延伸,即,从第一安装板802的面向操作员舱室516的部分延伸。参考图34,其中第一安装板802的外表面(未标记)(即,第一安装板802的背离操作员舱室516的部分)是可见的,固定壳体部分552A可以包括例如支架(未标记),支架接合第一安装板802(例如间隔件870从内表面向外延伸),以将固定壳体部分552A固定到第一安装板802。
滑架组件816可以类似地联接到第一支撑结构552的可移动壳体部分552B。例如,如图36-38所示,滑架组件816可以包括形成在内表面和/或一个或更多个侧面(未标记)中的一个或多个螺纹孔(不可见),其接纳紧固件872(图36中仅可见一个紧固件872)。每个紧固件872包括围绕紧固件872的相应的间隔件874、876,在将紧固件872接纳在螺纹孔中时,间隔件874、876可以从滑架组件816的内表面和/或侧面向外延伸。可移动壳体部分552B可以包括与滑架组件816接合的支架(未标记)(例如,间隔件874、876从内表面和/或一个或多个侧面向外延伸),以将可移动壳体部分552B固定到滑架组件816(从滑架组件816的侧面向外延伸的间隔件874可在图34中看到)。
如图37和38所示,第一竖直调节组件800还包括锁定气体弹簧832,该锁定气体弹簧控制滑架组件816和安装板684(以及因此第一操作员控制组件562)相对于第一安装板802和轨道构件808的竖直位置和运动。锁定气体弹簧832可以包括杆834和缸836。缸836的一端包括配件838,该配件接合形成在安装板684上的突起840。卡扣环(未标记)可用于将配件838固定到突起840。
接收器844可以通过例如紧固件848联接到第一安装板802,该紧固件延伸穿过开口852并且被接纳在支座854的内螺纹孔中。杆834的相对端(可以包括释放阀842)插入到形成在接收器844中的开口844A中。接收器844包括接收凸轮850的槽844B。开口844C穿过接收器844的包括槽844B的部分形成,销846延伸穿过开口844C并穿过形成在凸轮850中的开口850A,以将凸轮850可枢转地固定到接收器844。开口844A的下部部分可以与槽844B连通,使得当锁定气体弹簧832的杆834插入到开口844A中时,凸轮850的延伸部850C定位成与释放阀842相邻或接触。
操纵杆860位于锁定气体弹簧832下方,并且联接到接收器844和凸轮850,以操作锁定气体弹簧832到释放阀842。操纵杆860包括固定端860-1和自由端860-2。在所示实施例中,支座854可以延伸穿过形成在接收器844中的开口844D,并穿过形成在操纵杆860的固定端860-1中的开口860A。卡扣环(未标记)可以用于将操纵杆860的固定端860-1固定到接收器844,并将操纵杆860可枢转地联接到接收器844。操纵杆860的固定端860-1包括突起862,该突起接纳在凸轮850中形成的开口850B中。支座854保持必要的间隔以防止突起862和第一安装板802之间的接触。
参考图34-38,将详细描述第一竖直调节组件800的操作。如图34和36所示,操纵杆860的自由端860-2处于休止或第一位置,第一操作员控制组件562处于降低位置,即第一竖直位置。操作员向操纵杆860的自由端860-2施加向上的力,如箭头B所示,以将操纵杆860的自由端860-2从第一位置移动到升高或第二位置,如图35和37所示。固定壳体部分552A可以包括槽553,该槽容纳操纵杆860的运动。
操纵杆860的自由端860-2从第一位置到第二位置的运动导致操纵杆860的固定端860-1围绕图37所示的轴线880旋转。凸轮850和形成在操纵杆860上的突起862之间的接合导致凸轮850枢转,使得凸轮850的延伸部850C向上运动并致动(例如压下)释放阀842。释放阀842的致动解锁该锁定气体弹簧832,并允许第一操作员控制组件562沿箭头A所示方向进行竖直运动。由于配件838和突起840之间的接合,安装板684与锁定气体弹簧832的缸836一起向上运动(缸836的一部分在图34和35中可见)。联接到安装板684的滑架组件816经由线性支承块824沿着轨道构件808向上滑动,联接到滑架组件816的可移动壳体部分552B沿着固定壳体部分552A向上进行伸缩运动。因此,第一操作员控制组件562和可移动壳体部分552B(经由滑架组件816和安装板684)从图34和36所示的第一竖直位置朝向第二竖直位置运动,即朝向图35和37所示的升高位置运动。
在一些示例中,锁定气体弹簧832可以被配置为使得缸836在释放阀842致动时立即向上运动(即,远离释放阀842),而不需要施加额外的力。在其它示例中,锁定气体弹簧832可以被配置为使得需要额外的向上力来实现向上运动,例如,操作员可以用脚或用一只手致动操纵杆860,并且可以使用另一只手在第一操作员控制组件(例如,第一壳体566)上施加额外的向上力,以将第一操作员控制组件562引导到期望位置。在进一步的示例中,第一竖直调节组件800可以可选地包括一个或多个附加结构,例如在操纵杆860和锁定气体弹簧832之间延伸的电缆组件(未示出),其致动释放阀842以解锁该锁定气体弹簧832,在一些具体示例中,操纵杆860可以定位在第一支撑结构552或第一操作员控制组件562上的不同位置处(例如在锁定气体弹簧832的全部或部分上方)。
在将第一操作员控制组件562放置在期望的竖直位置处之后,操作员释放操纵杆860的自由端860-2。操纵杆860的自由端860-2返回到第一位置,这使凸轮850的延伸部850C与释放阀842脱开,并使锁定气体弹簧832锁定,从而将第一操作员控制组件562固定就位。
为了降低第一操作员控制组件562,操作员通过用脚或一只手沿箭头B所示的方向施加向上的力(这压下释放阀842并解锁该锁定气体弹簧832),将操纵杆860的自由端860-2从第一位置运动到第二位置。然后,操作员用另一只手向第一操作员控制组件562(例如,第一壳体566)施加向下的力,以使第一操作员控制组件562沿箭头A所示的方向向下运动。安装板684和滑架组件816与锁定气体弹簧832到缸836一起向下运动,使得第一操作员控制组件562和可移动壳体部分552B从第一竖直位置(在这种情况下,图35所示的升高位置)朝向第二竖直位置(在此情况下,图34和36所示的降低位置)运动。在将第一操作员控制组件562放置在期望的竖直位置之后,操作员释放操纵杆860的自由端860-2,这导致锁定气体弹簧832再次锁定,从而将第一操作员控制组件562固定就位。固定壳体部分552A、第一安装板802和轨道构件808在第一操作员控制组件562的调节期间保持静止。
参考图34和35,第二操作员控制组件564可以包括第二竖直调节组件900,其可以基本上类似于第一竖直调节组件800。第二竖直调节组件900联接到第二操作员控制组件564,以在多个竖直位置处选择性地支撑第二操作员控制组件564并提供第二操作员控件组件564在箭头A所示的竖直方向上相对于地板540(参见图32)和相对于固定壳体部分554A的运动。第二竖直调节组件900可以包括第二安装板902,其将第二竖直调节组件900固定地联接到内支撑壁524,如关于第一安装板802所述的。虽然不可见,但第二竖直调节组件900还可以包括与轨道构件808和滑架组件816基本相似的轨道构件和滑架组件,其中轨道构件附接到第二安装板902,滑架组件经由多个线性支承块可移动地联接到轨道构件。如图34和35所示,第二操作员控制组件564的固定结构682,即安装板704,可以经由滑架组件联接到第二安装板902和轨道构件。
类似于第一安装板802,第二安装板902可以联接到第二支撑结构554的固定壳体部分554A。如图34所示,其中第二安装板902的外表面(未标记)是可见的,第二安装板902可以包括接纳紧固件与间隔件(不可见)的一个或多个延伸部964,并且固定壳体部分554A可以包括接合第二安装板902(例如经由间隔件)以将固定壳体部分554A固定到第二安装板902的支架(未标记)。
类似于第一支撑结构552的可移动壳体部分552B,第二支撑结构554的可移动壳体部分554B可以联接到滑架组件。例如,从滑架组件的侧面向外延伸的间隔件974在图34中可见,并且可移动壳体部分554B可以包括与滑架组件接合(例如,间隔件974从侧面向外伸出)以将可移动壳体部分554B固定到滑架组件的支架(未标记)。虽然不可见,但可移动壳体部分554B可类似地包括与从滑架组件的内表面向外延伸的间隔件接合的支架。
继续参考图34和图35,第二竖直调节组件900可以包括锁定气体弹簧(在图34和35中仅可见锁定气体弹簧的缸936),其可基本上类似于本文所述的锁定气体弹簧832。锁定弹簧可以联接到第二操作员控制组件564的安装板704,以控制滑架组件和安装板704(以及因此第二操作员控制组件564)相对于第二安装板902和轨道构件的竖直位置和运动。虽然不可见,但第二竖直调节组件900可以进一步包括接收器和凸轮,其可基本类似于第一竖直调节组件800的接收器844和凸轮850。
操纵杆960联接到接收器和凸轮,以操作锁定气体弹簧的释放阀,并且允许第二操作员控制组件564的竖直运动。例如,为了将第二操作员控制组件564从第一竖直位置运动到第二竖直位置(即,升高和降低第二操作员控制组件564),操作员用脚或用一只手向操纵杆960的自由端960-2施加向上的力,如箭头B所示,将自由端960-2从图34所示的休止或第一位置运动到图35所示的升高或第二位置。固定壳体部分554A可以包括槽555,该槽容纳操纵杆960的运动。如本文中关于第一竖直调节组件800详细描述的,操纵杆960的自由端960-2的向上运动压下释放阀并解锁该锁定气体弹簧。然后,第二操作员控制组件564和可移动壳体部分554B可以在图34所示的降低位置和图35所示的升高位置之间沿箭头A所示的方向向上或向下运动。在将第二操作员控制组件564放置在期望的竖直位置处之后,操作员释放操纵杆960的自由端960-2。操纵杆960的自由端960-2返回到第一位置,这导致锁定气体弹簧锁定,从而将第二操作员控制组件564固定就位。固定壳体部分554A、第二安装板902和轨道构件在第二操作员控制组件564的调节期间保持静止。
第一和第二操作员控制组件562、564可以在降低位置和升高位置之间连续调节,并且可以沿着第一和第二竖直调节组件800、900允许的运动路径放置在任何期望的竖直位置处,以实现不同身高的操作员的人体工程学定位并适应操作员偏好。
第一和第二操作员控制组件562、564的竖直位置可以彼此独立地调节。此外,第一和第二操作员控制组件562、564的竖直位置的调节可以与本文所述的一个或多个其它调节特征结合使用,包括改变第一操作员控制组件562的转向组件580的位置、更换第二操作员控制组件564的一个或者多个元件、和/或调节第一和/或第二操作员控制组件562、564相对于相应的第一和第二支撑结构552、554的角度取向。例如,当转向组件580处于图33-35所示的第一位置时,与转向组件580位于图36所示的第二位置时相比,操作员可能希望将第一操作员控制组件562置于较低的竖直位置。操作员还可能希望基于第一和第二操作员控制组件相对于其相应的第一和第二支撑结构552、554是否定位在第一或第二角度取向(见图12A至13D)和/或基于第二操作员控制组件564中可更换元件的尺寸和/或配置,来调节第一和/或第二操作员控制组件562、564的竖直位置。第一和第二操作员控制组件562、564的所有调节可以彼此独立地执行。
参考图28、30和32,包括第一和第二操作员控制组件662、664的外部操作员控制系统660设置在外部操作员工位543处,并且可以用作第一操作员控制系统560的替代,以驱动车辆510并控制一个或多个其它车辆功能。例如,第一和第二操作员控制组件662、664经由一个或多个安装支架(不可见)联接到外支撑壁640,并且定位成允许位于外部操作员工位543处的操作员进行操作,例如允许面向外支撑壁640和叉架组件470的操作员进行操作(也参见图31)。
第一和第二操作员控制组件662、664在横向方向L
仪表板600可以在第一和第二操作员控制组件662、664之间延伸,并且可以限定水平支撑表面,该水平支撑表面可以被操作员用作工作表面。如图28和30所示,第一和第二操作员控制组件662、664的至少一部分可以分别相对于仪表板600和外支撑壁640的上表面600A、640A凹入。第一和第二操作员控制组件662、664可被定位成使得第一和第二操作员控制组件662、664的相应最上侧部分(例如,转向组件780和长形抓握构件750)与仪表板600和外支撑壁640的上表面600A、640A齐平或相对于仪表板600和外支撑壁640的上表面600A、640A凹入。将第一和第二操作员控制组件662、664定位在仪表板600和外支撑壁640的上表面600A、640A下方允许物体(例如箱子)在上表面600A、640A上滑动,而不接触第一和第二操作员控制组件662、664。一个或多个托盘602、604可以设置在第一和/或第二操作员控制组件662、664附近,操作员可以使用该托盘来存储物品。
上述本公开的代表性实施例可描述如下:
A、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有地板和支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件;
固定结构,其联接到支撑结构,以相对于支撑结构以多个角度取向选择性地支撑操作员控制组件;以及
竖直调节组件,其联接到操作员控制组件,以相对于地板将操作员控制组件选择性地支撑在多个竖直位置处。
B、根据段落A所述的操作员控制系统,其中固定结构包括具有一个或多个第一开口和一个或多个第二开口的安装板以及将操作员控制组件的壳体联接到支撑结构的多个紧固件,其中:
当紧固件被接纳在安装板的一个或多个第一开口中时,操作员控制组件相对于支撑结构以第一角度取向安装;并且
当紧固件被接纳在一个或多个第二开口中时,操作员控制组件相对于支撑结构以第二角度取向安装,第二角度取向不同于第一角度取向。
C、根据段落B所述的操作员控制系统,其中当从第一角度取向运动到第二角度取向时,操作员控制组件围绕大致平行于物料搬运车辆的纵向轴线的轴线旋转。
D、根据段落A至C中任一段落所述的操作员控制系统,其中支撑结构包括固定壳体部分和可移动壳体部分,可移动壳体部联接到操作员控制组件并可与操作员控制组件一起运动,其中可移动壳体部分定位成可在固定壳体部分上进行伸缩运动。
E、根据段落A至D中任一段落所述的操作员控制系统,其中操作员控制组件可在第一竖直位置和第二竖直位置之间沿竖直方向连续运动。
F、根据段落A至E中任一段落所述的操作员控制系统,其中竖直调节组件包括:
安装板,其附接到物料搬运车辆的支撑壁;
轨道构件,其附接到安装板;
滑架组件,其可移动地联接到轨道构件,其中滑架组件联接到固定结构;以及
锁定气体弹簧,其联接到固定结构和安装板以控制操作员控制组件的竖直位置。
G、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括操作员工位,该操作员工位具有地板、第一支撑结构和在横向方向上与第一支撑结构间隔开的第二支撑结构,所述操作员控制系统包括:
第一操作员控制组件、第一固定结构和第一竖直调节组件,第一固定结构联接到第一支撑结构以相对于第一支撑结构以多个角度取向选择性地支撑第一操作员控制组件,第一竖直调节组件联接到第一操作员控制组件以相对于地板将第一操作员控制组件选择性地支撑在多个竖直位置处;以及
第二操作员控制组件、第二固定结构和第二竖直调节组件,第二固定结构联接到第二支撑结构以相对于第二支撑结构以多个角度取向选择性地支撑第二操作员控制组件,第二竖直调节组件联接到第二操作员控制组件以相对于地板将第二操作员控制组件选择性地支撑在多个竖直位置处。
H、根据段落G所述的操作员控制系统,其中:
第一固定结构包括具有一个或多个第一开口和一个或多个第二开口的第一安装板以及将第一操作员控制组件的第一壳体联接到第一支撑结构的多个第一紧固件,其中:
当所述多个第一紧固件被接纳在所述一个或多个第一开口中时,第一操作员控制组件相对于第一支撑结构以第一角度取向安装;并且
当所述多个第一紧固件被接纳在所述一个或多个第二开口中时,第一操作员控制组件相对于第一支撑结构以第二角度取向安装,第二角度取向不同于第一角度取向;并且
第二固定结构包括具有一个或多个第三开口和一个或多个第四开口的第二安装板以及将第二操作员控制组件的第二壳体联接到第二支撑结构的多个第二紧固件,其中:
当所述多个第二紧固件被接纳在所述一个或多个第三开口中时,第二操作员控制组件相对于第二支撑结构以第三角度取向安装;并且
当所述多个第二紧固件被接纳在一个或多个第四开口中时,第二操作员控制组件相对于第二支撑结构以第四角度取向安装,第四角度取向不同于第三角度取向。
I、根据段落H所述的操作员控制系统,其中:
当从第一角度取向运动到第二角度取向时,第一操作员控制组件围绕大致平行于物料搬运车辆的纵向轴线的第一轴线旋转;并且
当从第三角度取向运动到第四角度取向时,第二操作员控制组件围绕大致平行于物料搬运车辆的纵向轴线的第二轴线沿相反方向旋转。
J、根据段落G至I中任一段落所述的操作员控制系统,其中:
第一支撑结构包括第一固定壳体部分和第一可移动壳体部分,第一可移动壳体部联接到第一操作员控制组件并可与第一操作员控制组件一起运动,其中第一可移动壳体部分定位成可在第一固定壳体部分上进行伸缩运动;并且
第二支撑结构包括第二固定壳体部分和第二可移动壳体部分,第二可移动壳体部联接到第二操作员控制组件并可与第二操作员控制组件一起运动,其中第二可移动壳体部分定位成可在第二固定壳体部分上进行伸缩运动。
K、根据段落G至J中任一段落所述的操作员控制组件,其中:
第一操作员控制组件可在第一竖直位置和第二竖直位置之间沿竖直方向连续运动;并且
第二操作员控制组件可在第三竖直位置和第四竖直位置之间沿竖直方向连续运动。
L、根据段落G至K中任一段落所述的操作员控制组件,其中第一操作员控制组件的角度取向或竖直位置中的至少一个可以独立于第二操作员控制组件的角度取向或竖直位置中的至少一个进行调节。
M、根据段落G至L中任一段落所述的操作员控制组件,其中:
第一竖直调节组件包括:
第一安装板,其附接到物料搬运车辆的支撑壁;
第一轨道构件,其附接到第一安装板;
第一滑架组件,其可移动地联接到第一轨道构件,其中第一滑架组件联接到第一固定结构;以及
第一锁定气体弹簧,其联接到第一固定结构和第一安装板以控制第一操作员控制组件的竖直位置;并且
第二竖直调节组件包括:
第二安装板,其附接到物料搬运车辆的支撑壁;
第二轨道构件,其附接到第二安装板;
第二滑架组件,其可移动地联接到第二轨道构件,其中第二滑架组件联接到第二固定结构;以及
第二锁定气体弹簧,其联接到第二固定结构和第二安装板以控制第二操作员控制组件的竖直位置。
N、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有大致水平的地板表面和支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构;和
转向组件,其用于使物料搬运车辆转向,该转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中,其中:
当处于第一位置时,转向控制结构大致以第一取向从基部结构延伸;并且
当处于第二位置时,转向控制结构大致以第二取向从基部结构延伸,第二取向与第一取向不同;以及
竖直调节组件,其联接到操作员控制组件,以相对于大致水平的地板表面将操作员控制组件选择性地支撑在多个竖直位置处。
O、根据段落N所述的操作员控制系统,其中基部结构包括基板和联接到基板的安装件,该安装件可枢转地安装在壳体的承接部内,以使转向组件能够在第一位置和第二位置之间运动。
P、根据段落N或O所述的操作员控制系统,其中:
当转向组件定位在第一位置中时,转向控制结构相对于竖直平面以锐角取向,其中该竖直平面垂直于车辆的大致水平的地板表面;并且
当转向组件定位在第二位置中时,转向控制结构相对于水平平面以锐角取向,其中该水平平面平行于车辆的大致水平的地板表面。
Q、根据段落N至P中任一段落所述的操作员控制系统,其还包括用于将转向组件锁定在第一位置或第二位置中的至少一个位置中的锁定组件,其中锁定组件包括锁定释放结构,该锁定释放结构用于解锁该锁定组件,使得转向组件能够在第一位置或第二位置中的至少一个位置之间运动。
R、根据段落N至Q中任一段落所述的操作员控制系统,其中转向组件独立于支撑结构和壳体进行运动,使得当转向组件处于第一位置和第二位置时,支撑结构和壳体保持在相同位置。
S、根据段落R所述的操作员控制系统,其中壳体还包括控制元件区域,并且其中转向组件独立于控制元件区域进行运动。
T、根据段落N至S中任一段落所述的操作员控制系统,其中支撑结构包括固定壳体部分和可移动壳体部分,可移动壳体部联接到操作员控制组件并可与操作员控制组件一起运动,其中可移动壳体部分定位成可在固定壳体部分上进行伸缩运动。
U、根据段落N至T中任一段落所述的操作员控制系统,其中操作员控制组件可在第一竖直位置和第二竖直位置之间沿竖直方向连续运动。
V、根据段落N至U中任一段落所述的操作员控制系统,其中竖直调节组件包括:
安装板,其附接到车辆的支撑壁;
轨道构件,其附接到安装板;
滑架组件,其可移动地联接到轨道构件,其中滑架组件联接到固定结构;以及
锁定气体弹簧,其联接到固定结构和安装板以控制操作员控制组件的竖直位置。
W、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括操作员工位,该操作员工位具有大致水平的地板表面、第一支撑结构和在横向方向上与第一支撑结构间隔开的第二支撑结构,所述操作员控制系统包括:
第一操作员控制组件,其包括:
第一壳体,其安装到第一支撑结构;和
转向组件,其用于使物料搬运车辆转向,该转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于第一壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中,其中:
当处于第一位置时,转向控制结构大致以第一取向从基部结构延伸;并且
当处于第二位置时,转向控制结构大致以第二取向从基部结构延伸,第二取向与第一取向不同;以及
第一竖直调节组件,其联接到第一操作员控制组件,以相对于大致水平的地板表面将第一操作员控制组件选择性地支撑在多个竖直位置处;以及
第二操作员控制组件,其包括安装到第二支撑结构的第二壳体;以及
第二竖直调节组件,其联接到第二操作员控制组件,以相对于大致水平的地板表面将第二操作员控制组件选择性地支撑在多个竖直位置处。
X、根据段落W所述的操作员控制系统,其中基部结构包括基板和联接到基板的安装件,其中该安装件可枢转地安装在壳体的承接部内,以使转向组件能够在第一位置和第二位置之间运动。
Y、根据段落W或X所述的操作员控制系统,其中:
当转向组件定位在第一位置中时,转向控制结构相对于竖直平面以锐角取向,其中该竖直平面垂直于车辆的大致水平的地板表面;并且
当转向组件定位在第二位置中时,转向控制结构相对于水平平面以锐角取向,其中该水平平面平行于车辆的大致水平的地板表面。
Z、根据段落W至Y中任一段落所述的操作员控制系统,其中转向组件独立于第一支撑结构和第一壳体进行运动,使得当转向组件处于第一位置和第二位置时,第一支撑结构和第一壳体保持在相同位置。
AA、根据段落Z所述的操作员控制系统,其中第一壳体还包括控制元件区域,并且其中转向组件独立于控制元件区域进行运动。
BB、根据段落W至AA中任一段落所述的操作员控制系统,其中:
第一支撑结构包括第一固定壳体部分和第一可移动壳体部分,第一可移动壳体部联接到第一操作员控制组件并可与第一操作员控制组件一起运动,其中第一可移动壳体部分定位成可在第一固定壳体部分上进行伸缩运动;并且
第二支撑结构包括第二固定壳体部分和第二可移动壳体部分,第二可移动壳体部联接到第二操作员控制组件并可与第二操作员控制组件一起运动,其中第二可移动壳体部分定位成可在第二固定壳体部分上进行伸缩运动。
CC、根据段落W至BB中任一段落所述的操作员控制组件,其中:
第一操作员控制组件可在第一竖直位置和第二竖直位置之间沿竖直方向连续运动;并且
第二操作员控制组件可在第三竖直位置和第四竖直位置之间沿竖直方向连续运动。
DD、根据段落W至CC中任一段落所述的操作员控制组件,其中第一操作员控制组件的竖直位置可以独立于第二操作员控制组件的竖直位置进行调节。
EE、根据段落W至DD中任一段落所述的操作员控制组件,其中第二操作员控制组件的竖直位置可以独立于第一操作员控制组件的竖直位置或转向组件的定位中的至少一个进行调节。
FF、根据段落W至EE中任一段落所述的操作员控制组件,其中:
第一竖直调节组件包括:
第一安装板,其附接到物料搬运车辆的支撑壁;
第一轨道构件,其附接到第一安装板;
第一滑架组件,其可移动地联接到第一轨道构件,其中第一滑架组件联接到第一固定结构;以及
第一锁定气体弹簧,其联接到第一固定结构和第一安装板以控制第一操作员控制组件的竖直位置;并且
第二竖直调节组件包括:
第二安装板,其附接到物料搬运车辆的支撑壁;
第二轨道构件,其附接到第二安装板;
第二滑架组件,其可移动地联接到第二轨道构件,其中第二滑架组件联接到第二固定结构;以及
第二锁定气体弹簧,其联接到第二固定结构和第二安装板以控制第二操作员控制组件的竖直位置。
GG、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构,该壳体包括凹部;
第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在凹部上延伸;以及
第一控制元件,其在凹部内安装到壳体,该第一控制元件被配置为控制物料搬运车辆的功能;以及
竖直调节组件,其联接到操作员控制组件,以相对于地板将操作员控制组件选择性地支撑在多个竖直位置处,
其中第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在所述至少一个抓握安装位置处安装到壳体并在凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置。
HH、根据段落GG所述的操作员控制系统,其中所述至少一个抓握安装位置包括第一抓握安装位置和第二抓握安装位置,第一抓握安装位置在凹部的第一侧上,第二抓握安装位置在凹部的第二侧上,凹部的第二侧与凹部的第一侧相对。
II、根据段落GG或HH所述的操作员控制系统,其中支撑结构包括固定壳体部分和可移动壳体部分,可移动壳体部联接到操作员控制组件并可与操作员控制组件一起运动,其中可移动壳体部分定位成可在固定壳体部分上进行伸缩运动。
JJ、根据段落GG至II中任一段落所述的操作员控制系统,其中操作员控制组件可在第一竖直位置和第二竖直位置之间沿竖直方向连续运动。
KK、根据段落GG至JJ中任一段落所述的操作员控制系统,其中竖直调节组件包括:
安装板,其附接到车辆的支撑壁;
轨道构件,其附接到安装板;
滑架组件,其可移动地联接到轨道构件,其中滑架组件联接到固定结构;以及
锁定气体弹簧,其联接到固定结构和安装板以控制操作员控制组件的竖直位置。
LL、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构,该壳体包括凹部;
第一长形抓握构件,其安装到壳体并在凹部上延伸;以及
第一控制元件,其在凹部内安装到壳体,该第一控制元件被配置为控制物料搬运车辆的功能并且能够定位在包括两个端部位置的多个位置中;并且
其中具有以下特征中的至少一个:
第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置;或者
第一控制元件能够替换为第二控制元件,该第二控制单元能够定位在包括两个端部位置的多个位置中并且具有与第一控制单元不同的尺寸和/或不同的配置;
其中在第一控制元件或第二控制元件定位在其多个位置中的任何一个位置的情况下,第一控制元件或第二控制元件中的一个与第一抓握构件或第二抓握构件中的一个的相邻部分之间的间隙落在从最小间隙距离到最大到达距离的范围内;以及
竖直调节组件,其联接到操作员控制组件,以相对于地板将操作员控制组件选择性地支撑在多个竖直位置处。
MM、根据段落LL所述的操作员控制系统,其中第一长形抓握构件在第一抓握安装位置和第二抓握安装位置处固定到壳体,其中第一抓握安装位置在凹部的第一侧上,第二抓握安装位置在凹部的第二侧上,凹部的第二侧与凹部的第一侧相对。
NN、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有地板和支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构;
竖直调节组件,其联接到操作员控制组件,以相对于地板将操作员控制组件选择性地支撑在多个竖直位置处;以及
以下特征中的至少一个:
转向组件,其用于使物料搬运车辆转向,该转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中,其中转向控制结构在处于第一位置时大体上以第一取向从基部结构延伸,并且其中转向控制结构在处于第二位置时大体上以第二取向从基部结构延伸,第二取向不同于第一取向;或者
固定结构,其联接到支撑结构,以相对于支撑结构以多个角度取向选择性地支撑操作员控制组件。
OO、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有地板和支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构,该壳体包括凹部;
竖直调节组件,其联接到操作员控制组件,以相对于地板将操作员控制组件选择性地支撑在多个竖直位置处;以及
以下特征中的至少一个:
第一控制元件和第一长形抓握构件,第一控制元件在凹部内安装到壳体,第一长形抓握构件在至少一个抓握安装位置处安装到壳体并在凹部上延伸,其中第一长形抓握构件可替换为具有与第一抓握构件不同尺寸和/或不同构造的第二长形抓握构件,并且其中第一控制元件可替换为可定位在包括两个端部位置的多个位置中且具有与第一控制元件不同的尺寸和/或不同的构造的第二控制元件;或者
固定结构,其联接到支撑结构,以相对于支撑结构以多个角度取向选择性地支撑操作员控制组件。
PP、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括操作员工位,该操作员工位具有地板、第一支撑结构和在横向方向上与第一支撑结构间隔开的第二支撑结构,所述操作员控制系统包括:
第一操作员控制组件,其包括:
第一壳体,其安装到第一支撑结构;
第一竖直调节组件,其联接到第一操作员控制组件,以相对于地板将第一操作员控制组件选择性地支撑在多个竖直位置处;以及以下特征中的至少一个:
转向组件,其用于使物料搬运车辆转向,该转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中,其中转向控制结构在处于第一位置时大体上以第一取向从基部结构延伸,并且其中转向控制结构在处于第二位置时大体上以第二取向从基部结构延伸,第二取向不同于第一取向;或者
第一固定结构,其联接到第一支撑结构,以相对于第一支撑结构以多个角度取向选择性地支撑第一操作员控制组件;以及
第二操作员控制组件,其包括:
第二壳体,其安装到第二支撑结构,该第二壳体包括凹部;
第二竖直调节组件,其联接到第二操作员控制组件,以相对于地板将第二操作员控制组件选择性地支撑在多个竖直位置处;以及以下特征中的至少一个:
第一控制元件和第一长形抓握构件,第一控制元件在凹部内安装到壳体,第一长形抓握构件在至少一个抓握安装位置处安装到壳体并在凹部上延伸,其中第一长形抓握构件可替换为具有与第一抓握构件不同尺寸和/或不同构造的第二长形抓握构件,并且其中第一控制元件可替换为可定位在包括两个端部位置的多个位置中且具有与第一控制元件不同的尺寸和/或不同的构造的第二控制元件;或者
第二固定结构,其联接到第二支撑结构,以相对于第二支撑结构以多个角度取向选择性地支撑第二操作员控制组件。
QQ、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有第一支撑结构的操作员工位,所述操作员控制系统包括:
第一操作员控制组件,其包括:
第一壳体,其安装到第一支撑结构或与第一支撑结构成一体;以及
转向组件,其用于使物料搬运车辆转向,该转向组件包括转向控制结构和基部结构,转向控制结构从基部结构延伸,其中转向组件能够相对于第一壳体运动,使得转向组件能够定位在第一位置或第二位置中的至少一个位置中,其中:
当处于第一位置时,转向控制结构大致以第一取向从基部结构延伸;并且
当处于第二位置时,转向控制结构大致以第二取向从基部结构延伸,第二取向与第一取向不同。
RR、根据段落QQ所述的操作员控制系统,其中基部结构包括基板和联接到基板的安装件。
SS、根据段落RR所述的操作员控制系统,其中安装件被接纳在第一壳体的承接部中。
TT、根据段落SS所述的操作员控制系统,其中安装件可枢转地安装在第一壳体承接部内,以使转向组件能够在第一位置和第二位置之间运动。
UU、根据段落S或段落TT所述的操作员控制系统,其中安装件具有半球形形状,承接部具有对应的半球形形状。
VV、根据段落RR至UU中任一段落所述的操作员控制系统,其中基板可旋转地安装在安装件上,使得基板相对于安装件是可旋转的。
WW、根据段落RR至VV中任一段落所述的操作员控制系统,其中转向控制结构可旋转地安装在基板上,使得转向控制结构可相对于基板旋转。
XX、根据段落RR至WW中任一段落所述的操作员控制系统,其中基板包括围绕基板的周边的多个凹口。
YY、根据段落RR至XX中任一段落所述的操作员控制系统,其中当转向组件位于第一位置时,转向控制结构相对于竖直平面以锐角取向,其中该竖直平面垂直于车辆的大致水平的地板表面。
ZZ、根据段落RR至YY中任一段落所述的操作员控制系统,其中当转向组件定位在第二位置中时,转向控制结构相对于水平平面以锐角取向,其中该水平平面平行于车辆的大致水平的地板表面。
AAA、根据段落RR至ZZ中任一段落所述的操作员控制系统,其还包括用于将转向组件锁定在第一位置或第二位置中的至少一个位置中的锁定组件。
BBB、根据段落AAA所述的操作员控制系统,其中锁定组件包括锁定释放结构,该锁定释放结构用于解锁该锁定组件,使得转向组件能够在第一位置或第二位置中的至少一个位置之间运动。
CCC、根据段落AAA或段落BBB所述的操作员控制系统,其中锁定组件包括用于感测转向组件处于第一位置或第二位置中的至少一个位置的传感器。
DDD、根据段落RR至CCC中任一段落所述的操作员控制系统,其还包括固定结构,该固定结构联接到第一支撑结构,以选择性地将第一操作员控制组件支撑在第一支撑结构上的不同位置。
EEE、根据段落DDD所述的操作员控制系统,其中固定结构包括联接到第一支撑结构的安装板和延伸穿过设置在安装板中的开口的多个紧固件,并且其中紧固件将第一壳体联接到第一支撑结构。
FFF、根据段落EEE所述的操作员控制系统,其中安装板包括一个或多个第一开口以及一个或多个第二开口,其中当紧固件被接纳在安装板的所述一个或多个第一开口中时,第一操作员控制组件相对于第一支撑结构以第一取向安装,当紧固件被接纳在安装板的所述一个或多个第二开口中时,第一操作员控制组件相对于第一支撑结构以不同于第一取向的第二取向安装。
GGG、根据段落RR至FFF中任一段落所述的操作员控制系统,其中第一壳体具有弯曲下表面,该弯曲下表面被第一支撑结构的弯曲上表面接收。
HHH、根据段落RR至GGG中任一段落所述的操作员控制系统,其进一步包括:
第二操作员控制组件,其包括:
第二壳体,其安装到物料搬运车辆的第二支撑结构;以及
至少一个控制元件,其与第二壳体相关联,用于控制物料搬运车辆的功能;
其中物料搬运车辆的第一支撑结构和第二支撑结构在物料搬运车辆的横向方向上彼此间隔开,该横向方向垂直于物料搬运车辆的纵向轴线。
III、根据段落HHH所述的操作员控制系统,其中物料搬运车辆的第一支撑结构和第二支撑结构由物料搬运车辆的凹入部分分隔开,该凹入部分限定了从第一操作员控制组件和第二操作员控制组件朝向地板表面向下延伸的开口区域。
JJJ、根据段落RR至III中任一项所述的操作员控制系统,其中操作员工位位于具有地板表面的操作员舱室中,当使用操作员控制系统操作车辆时,操作员站在该地板表面上。
KKK、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有第一支撑结构的操作员工位,所述操作员控制系统包括:
第一操作员控制组件;以及
固定结构,其联接到第一支撑结构,以选择性地将第一操作员控制组件支撑在第一支撑结构上的不同位置。
LLL、根据段落KKK所述的操作员控制系统,其中固定结构包括联接到第一支撑结构的安装板和延伸穿过设置在安装板中的开口的多个紧固件,并且其中紧固件将第一操作员控制组件的第一壳体联接到第一支撑结构。
MMM、根据段落LLL所述的操作员控制系统,其中安装板包括一个或多个第一开口以及一个或多个第二开口,其中当紧固件被接纳在安装板的所述一个或多个第一开口中时,第一操作员控制组件相对于第一支撑结构以第一取向安装,当紧固件被接纳在安装板的所述一个或多个第二开口中时,第一操作员控制组件相对于第一支撑结构以不同于第一取向的第二取向安装。
NNN、根据段落LLL所述的操作员控制系统,其中安装板包括一个或多个第一开口以及一个或多个第二开口,其中当紧固件被接纳在安装板的所述一个或多个第一开口中时,第一操作员控制组件相对于第一支撑结构以第一角度取向定位,并且当从第一角度取向运动到第二角度取向时,第一操作员控制组件围绕与物料搬运车辆的纵向轴线大致平行的轴线旋转,使得当紧固件被接纳在所述一个或多个第二开口中时,第一操作员控制组件以第二角度取向安装。
OOO、根据段落KKK至NNN中任一段落所述的操作员控制系统,其中第一壳体具有弯曲下表面,该弯曲下表面被第一支撑结构的弯曲上表面接收。
PPP、根据段落KKK至OOO中任一段落所述的操作员控制系统,其进一步包括:
第二操作员控制组件,其安装到物料搬运车辆的第二支撑结构;
其中物料搬运车辆的第一支撑结构和第二支撑结构在物料搬运车辆的横向方向上彼此间隔开,该横向方向垂直于物料搬运车辆的纵向轴线。
QQQ、根据段落KKK至PPP中任一段落所述的操作员控制系统,其中固定结构相对于第一支撑结构以不同角度取向选择性地支撑第一操作员控制组件。
RRR、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构或与支撑结构成一体,该壳体包括凹部;
第一长形抓握构件,其安装到壳体并在壳体凹部上延伸;以及
第一控制元件,其在凹部内安装到壳体,该第一控制元件被配置为控制物料搬运车辆的功能并且能够定位在包括两个端部位置的多个位置中;并且
其中具有以下特征中的至少一个:
第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在壳体凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置;或者
第一控制元件能够替换为第二控制元件,该第二控制单元能够定位在包括两个端部位置的多个位置中并且具有与第一控制单元不同的尺寸和/或不同的配置;
其中在第一控制元件或第二控制元件定位在其多个位置中的任何一个位置的情况下,第一控制元件或第二控制元件中的一个与第一抓握构件或第二抓握构件中的一个的相邻部分之间的间隙落在从最小间隙距离到最大到达距离的范围内。
SSS、根据段落RRR所述的操作员控制系统,其中壳体凹部具有曲线形状。
TTT、根据段落RRR或段落SSS所述的操作员控制系统,其中第一控制元件是开关或操纵杆。
UUU、根据段落KKK至TTT中任一段落所述的操作员控制系统,其中第一长形抓握构件在第一抓握安装位置和第二抓握安装位置处固定到壳体,其中第一抓握安装位置在壳体凹部的第一侧上,第二抓握安装位置在壳体凹部的第二侧上,壳体凹部的第二侧与壳体凹部的第一侧相对。
VVV、根据段落KKK至UUU中任一段落所述的操作员控制系统,其中第一长形抓握构件包括第三控制元件。
WWW、一种用于物料搬运车辆的操作员控制系统,该物料搬运车辆包括具有支撑结构的操作员工位,所述操作员控制系统包括:
操作员控制组件,其包括:
壳体,其安装到支撑结构或与支撑结构成一体,该壳体包括凹部;
第一长形抓握构件,其在至少一个抓握安装位置处安装到壳体并在壳体凹部上延伸;以及
第一控制元件,其在凹部内安装到壳体,该第一控制元件被配置为控制物料搬运车辆的功能;并且
其中第一长形抓握构件能够替换为第二长形抓握构件,该第二长形抓握构件在所述至少一个抓握安装位置处安装到壳体并在壳体凹部上延伸并且具有与第一抓握构件不同的尺寸和/或不同的配置。
XXX、根据段落WWW所述的操作员控制系统,其中壳体凹部具有曲线形状。
YYY、根据段落WWW或段落XXX所述的操作员控制系统,其中第一控制元件是开关或操纵杆。
ZZZ、根据段落WWW至YYY中任一段落所述的操作员控制系统,其中所述至少一个抓握安装位置包括第一抓握安装位置和第二抓握安装位置,第一抓握安装位置在壳体凹部的第一侧上,第二抓握安装位置在壳体凹部的第二侧上,壳体凹部的第二侧与壳体凹部的第一侧相对。
AAAA、根据段落WWW至ZZZ中任一段落所述的操作员控制系统,其中第一长形抓握构件包括第二控制元件。
此外,本文描述的各种特征、方面和实施例可以彼此以任何组合使用,或单独使用。
已经如此详细地描述了实施例,显而易见的是,在不脱离所附权利要求的范围的情况下,修改和变化是可能的。
- 用于物料搬运车辆的模块化车辆车架及物料搬运车辆
- 一种物料搬运车辆以及导航物料搬运车辆的系统和方法