用于反馈机械手指位置的检测机构
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及机器人领域,特别涉及一种用于反馈机械手指位置的检测机构。
背景技术
现有的机器人或机械手的机械手指,其运动位置监测通常是由集成的推杆电机或者舵机完成的,但集成的推杆电机或者舵机的成本较高,且需要较大的安装空间,影响机械手指结构的小型化。
发明内容
为了解决上述问题,本发明提供了一种用于反馈机械手指位置的检测机构,解决了传统检测机构成本较高、需要较大安装空间的问题。
本发明通过如下方案来实现:一种用于反馈机械手指位置的检测机构,机械手指通过第一转轴转动连接于一基座的前端,所述检测机构装设于所述基座的顶部,包括:
直线型电位器,所述直线型电位器的电位器滑杆沿垂直于所述第一转轴的方向滑动设置;
用于连接在所述机械手指和所述电位器滑杆之间、且使所述机械手指的转动与所述电位器滑杆的滑动呈线性关系的传动组件;
用于在被触碰时发出反馈信号的两个触发开关,两个所述触发开关分别对位于所述电位器滑杆的滑动区间的始端和末端;
与所述电位器滑杆同步滑动的触发件,所述触发件的第一端与所述电位器滑杆连接,所述触发件的第二端在滑动至所述触发开关的位置时触碰所述触发开关;
控制器,控制连接于所述直线型电位器和两个所述触发开关。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述滑动区间与所述机械手指的转动范围相对应。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述传动组件包括弧形传动杆以及套设于所述电位器滑杆的卡套,所述弧形传动杆的第一端通过第二转轴转动连接于所述机械手指,所述弧形传动杆的第二端通过第三转轴转动连接于所述卡套,所述第一转轴、所述第二转轴和所述第三转轴平行且上下错位设置。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述触发件的第一端固定至所述卡套的侧边,所述触发件的第二端延伸出所述直线型电位器的顶面并向下弯折,所述触发开关的顶面设有伸缩块,所述触发件的第二端标高低于所述伸缩块为伸长状态时的顶标高、且高于所述伸缩块为压缩状态时的顶标高。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述触发件的第二端形成为扩大头,所述伸缩块上形成有供所述扩大头触碰的接触坡面。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述卡套的后部开设有供套设于所述电位器滑杆的通孔,所述卡套的前部开设有供所述弧形传动杆的第二端插入的U型槽,所述第二转轴穿过所述弧形传动杆的第二端并垂直连接于所述U型槽的两侧壁之间。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述机械手指的根部通过所述第一转轴转动连接于所述基座,且所述机械手指的根部向外延伸形成与所述机械手指呈钝角夹角的续接段,所述弧形传动杆的第一端通过所述第二转轴转动连接于所述续接段远离所述机械手指的一端。
本发明用于反馈机械手指位置的检测机构的进一步改进在于,所述控制器、所述直线型电位器以及两个所述触发开关均集成于一块控制板上,所述控制板装设于所述基座上。
本发明取消了传统推杆电机或舵机进行机械手指位置监测的方式,利用直线型电位器的特性,通过传动组件将机械手指的转动与直线型电位器的电阻变化建立线性关联,既能够实时检测机械手指的准确位置,又降低了成本。另外,通过触发开关与触发件的配合设置,能够实现对机械手指的转动起始位置和转动终止位置进行标识和限位,补充了软件限位的不足。
附图说明
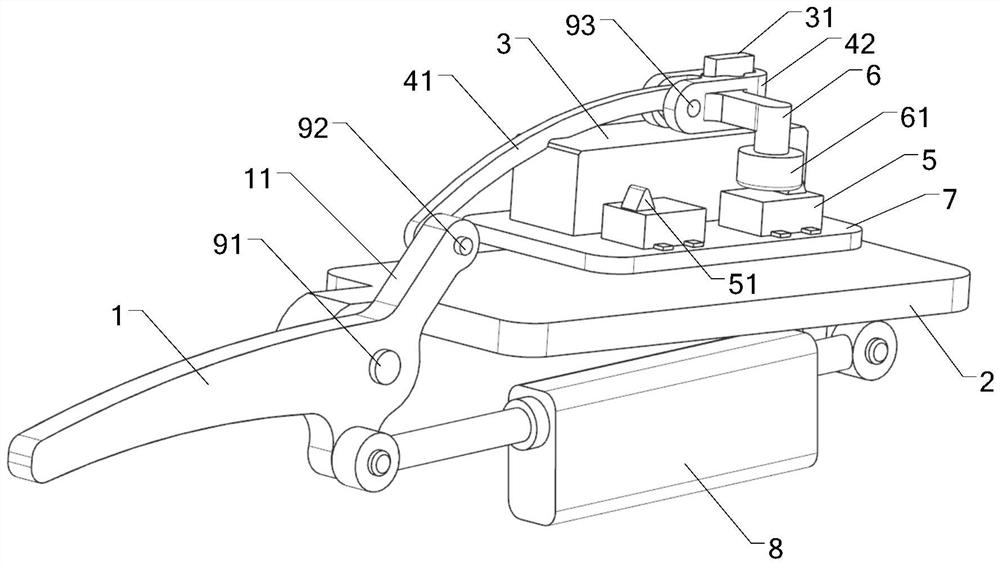
图1示出了本发明检测机构在机械手指为转动起始位置时的状态示意图。
图2示出了本发明检测机构在机械手指为转动终止位置时的状态示意图。
具体实施方式
为了解决传统检测机构成本较高、需要较大安装空间的问题,本发明提供了一种用于反馈机械手指位置的检测机构。下面以具体实施例结合附图对该用于反馈机械手指位置的检测机构作进一步说明。
参阅图1和图2所示,一种用于反馈机械手指位置的检测机构,机械手指1通过第一转轴91转动连接于一基座2的前端,该检测机构装设于该基座2的顶部,包括:直线型电位器3,所述直线型电位器3的电位器滑杆31沿垂直于所述第一转轴91的方向滑动设置;用于连接在该机械手指1和该电位器滑杆31之间、且使该机械手指1的转动与该电位器滑杆31的滑动呈线性关系的传动组件;用于在被触碰时发出反馈信号的两个触发开关5,两个该触发开关5分别对位于该电位器滑杆31的滑动区间的始端和末端;与该电位器滑杆31同步滑动的触发件6,该触发件6的第一端与该电位器滑杆31连接,该触发件6的第二端在滑动至该触发开关5的位置时触碰该触发开关5;控制器,控制连接于该直线型电位器3和两个该触发开关5。
具体地,该控制器、该直线型电位器3以及两个该触发开关5均集成于一块控制板7上,该控制板7装设于该基座2上,进一步地,本实施方式还将该机械手指1的驱动机构8装设在该基座2的底部,使得该机械手指1的驱动和检测均集成在该基座2上,实现了机械手整体结构的小型化。较佳地,本实施方式中各部件的布设,满足该定位器滑杆31的滑动区间与该机械手指1的转动范围相对应,使得在该定位器滑杆31位于滑动区间的始端和末端(即机械手指1的转动起始和转动终止位置)时,触发件6会触碰相应的触发开关5,而触发开关5被触发时会反馈信号给该控制器。
在该机械手指1被驱动机构8驱动转动的过程中,通过传动组件的传动,该定位器滑杆31将随着该机械手指1的转动而沿着滑动区间进行滑动,随着定位器滑杆31的滑动,该直线型电位器的电阻值将以一定比例进行变化,而该变化的电阻值将反馈至控制器,该控制器根据电阻值的变化情况来分析判断该机械手指1的转动位置,进而实现对该机械手指1的转动位置的实时检测。
本实施例取消了传统推杆电机或舵机进行机械手指位置监测的方式,利用直线型电位器的特性,通过传动组件将机械手指的转动与直线型电位器的电阻变化建立线性关联,既能够实时检测机械手指的准确位置,又降低了成本。另外,通过触发开关与触发件的配合设置,能够实现对机械手指的转动起始位置和转动终止位置进行标识和限位,补充了软件限位的不足。
作为一较佳实施方式,该传动组件包括弧形传动杆41以及套设于该电位器滑杆31的卡套42,该弧形传动杆41的第一端通过第二转轴92转动连接于该机械手指1,该弧形传动杆41的第二端通过第三转轴93转动连接于该卡套42,该第一转轴91、该第二转轴92和该第三转轴93平行且上下错位设置。
具体来说,该卡套42的后部开设有供套设于该电位器滑杆31的通孔,该卡套42的前部开设有供该弧形传动杆41的第二端插入的U型槽,该第二转轴93穿过该弧形传动杆41的第二端并垂直连接于该U型槽的两侧壁之间。通过该弧形传动杆41的设置,使该机械手指1的转动可以转换为该电位器滑杆31的直线运动,且通过弧形传动杆41的弧度以及与机械手指1的连接位置的配合设计,使得该电位器滑杆31的位移会随着该机械手指1的转动以一定比例进行变化,进而使得机械手指1的转动与直线型电位器3的电阻变化建立了线性关联。当然,除了上述实施例以外,该传动组件还可以采用能够将转动运动与直线运动建立线性关联的其他传动结构,如蜗轮、蜗杆相配合的传动结构,或者是齿轮、齿条相配合的传动结构等。
作为一较佳实施方式,该触发件6的第一端固定至该卡套42的侧边,该触发件6的第二端延伸出该直线型电位器3的顶面并向下弯折,该触发开关5的顶面设有伸缩块51,该触发件6的第二端标高低于该伸缩块51为伸长状态时的顶标高、且高于该伸缩块51为压缩状态时的顶标高。较佳地,该触发件6的第二端形成为扩大头61,该伸缩块51上形成有供该扩大头61触碰的接触坡面。通过将触发件6固定在卡套42上,避免了将该触发件6硬连接在该电位器滑杆31上,以便于其拆装。另外,通过扩大头61和伸缩块51的配合设置,保证了触发件6能够可靠地触发两个触发开关5,保证了检测的准确性。
作为一较佳实施方式,该机械手指1的根部通过该第一转轴91转动连接于该基座,且该机械手指1的根部向外延伸形成与该机械手指1呈钝角夹角的续接段11,该弧形传动杆41的第一端通过该第二转轴92转动连接于该续接段11远离该机械手指1的一端。通过该续接段11的设置,配合该弧形传动杆41更好的进行动作传递,使该电位器滑杆31的滑动更加顺滑。较佳地,该弧形传动杆41相对于直线型电位器3的一侧还可以设置一卡口,该卡口的设置满足在该电位器滑杆31滑动至始端时(如图1所示),卡设在该直线型电位器3的边缘处,以便于从机械角度对该电位器滑杆31的滑动进行限位。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 一种用于反馈阀门开关位置的双位反馈器
- 一种用于机械开关斥力机构位置状态的反馈装置
- 一种机器人机械臂位置反馈机构、机器人机械臂及机器人