着陆装置
文献发布时间:2023-06-19 18:32:25
技术领域
本公开涉及着陆装置,更特别地,涉及能够允许以紧凑的方式收纳无人航空器的着陆装置。
背景技术
近年来,基于全球定位系统(GPS)等获取的位置信息通过遥控或自主飞行执行飞行的小型无人航空器(所谓的无人机)的使用已经增加。配备有相机的无人机用于航空拍摄,以从上方对地面上的风景等进行成像。最近,无人机还已经用于地形测量等。
无人机配备有用于在地面上支持无人机的着陆装置(也称为起落架等)。一些着陆装置被配置为能够被提升和降低,以便在无人机飞行期间不干扰成像或测量。
作为用于支持物体的机构,例如,专利文献1公开了一种支架用扩展器,其中臂的一端通过接合而附接于主体,另一端通过锁定元件可拆卸地连接到支架的支持腿。
引文列表
专利文献
专利文献1:日本专利申请公开No.2009-63167
发明内容
本发明要解决的问题
着陆装置需要具有防止安装在无人机主体底部的相机或测量仪器在无人机着陆时接触地面的长度。然而,在收纳无人机的情况下,需要准备具有与着陆装置的长度相对应的尺寸的收纳箱。
本公开是鉴于这种情况而提出的,并且本公开的一个目的是使得能够以紧凑的方式收纳无人航空器。
针对问题的解决方案
本公开的着陆装置包括:第一腿部,该第一腿部能够以在无人航空器的主体侧的第一端部为轴摆动;以及第二腿部,其可拆卸地附接到第一腿部的第二端部,使得第二腿部在第一腿部的轴向方向上延伸。
在本公开中,第一腿部被配置成能够以在无人航空器的主体侧的第一端部为轴摆动,并且第二腿部可拆卸地附接到第一腿部的第二端部,以在第一腿部的轴向方向上延伸。
附图说明
图1是示出根据实施例的无人机的外观的透视图。
图2是示出应用了根据本公开的技术的着陆装置的外观的透视图。
图3是示出处于腿提升状态的着陆装置的图。
图4是用于描述第二腿部的附接和拆卸的图。
图5是示出附接构件的配置示例的透视图。
图6是示出附接构件的配置示例的透视图。
图7是用于描述保持部和调整部的细节的图。
图8是用于描述突起部分的锁定的透视图。
图9是用于描述突起部分的结构的侧剖视图。
图10是示出腿降低状态下的伸缩连杆部的配置示例的侧视图。
图11是示出腿提升状态下的伸缩连杆部的配置示例的侧视图。
图12是示出腿降低状态下的伸缩连杆部的内部结构示例的侧剖视图。
图13是示出腿提升状态下的伸缩连杆部的内部结构示例的侧剖视图。
具体实施方式
在下文中,将描述用于实施本公开的模式(在下文中称为实施例)。请注意,将按以下顺序进行描述。
1.无人机外观
2.着陆装置外观
3.附接构件的配置
4.伸缩连杆部的配置和操作
<1.无人机的外观>
图1是示出根据实施例的作为无人航空器的无人机的外观的透视图。
图1所示的无人机1包括主体10和从主体10延伸的多个(在本实施例中为四个)框架部分11。此外,无人机1包括在框架部分11的远端(不在主体10侧的端部)处的螺旋桨20。螺旋桨20由安装在框架部分11的远端内的马达(未示出)旋转。
各种电气部件单元安装在主体10和框架部分11的内部。具体地,接收单元、控制器、传感器单元、电池单元等安装在主体10的内部。在框架部分11内部,安装有驱动控制单元,该驱动控制单元控制使螺旋桨20旋转的马达的驱动等。
此外,尽管未示出,但无人机1安装有经由万向节连接到主体10的底部的航空摄影相机,该万向节可通过上述控制器的控制而被驱动。
此外,在主体10的底部,无人机1包括在地面上支持主体10的多个(在本实施例中为两个)着陆装置30。着陆装置30的长度防止安装在无人机1的主体10底部的航空摄影相机在无人机1着陆时接触地面。此外,着陆装置30被配置为能够被提升和降低,以便在无人机1的飞行期间不干扰航空摄影相机的成像。
<2.着陆装置的外观>
图2是示出应用了根据本公开的技术的着陆装置30的外观的透视图。
如图2所示,着陆装置30包括第一腿部51、第二腿部52、接地部53、连接部54和伸缩连杆部55。
第一腿部51形成为杆状(中空管状)。第一腿部51被配置为通过经由连接部54将无人机1的主体10侧的端部(第一端部)连接到主体10,能够以第一端部为轴摆动。
附接构件51A设置在第一腿部51的不在主体10侧的端部(第二端部)处,并且经由附接构件51附接形成为杆状(中空管状)的第二腿部52以在第一腿部51的轴向上延伸。第二腿部52形成为比第一腿部51长,例如,以具有约为第一腿部51的两倍的长度。
形成为杆状(中空管状)的接地部53被接合到第二腿部52的不在第一腿部51(附接构件51A)侧的端部。接地部53接合到第二腿部52以形成T形,并且在无人机1着陆时直接接触地面。第二腿部52和接地部53可以被配置为可分离(可拆卸)。
以下,将图2所示的着陆装置30的状态称为腿部降低状态。在无人机1着陆时,通过使着陆装置30进入腿部降低状态,可以防止安装在无人机1的主体10底部的航空摄影相机接触地面。
伸缩连杆部55的位于无人机1的主体10侧的端部连接到连接部54的设置在比连接第一腿部51的轴更靠近地面的一侧的轴。伸缩连杆部55的不在主体10侧的端部连接到附接构件51A(第一腿部51的第二端部)。即,伸缩连杆部55与第一腿部51和连接部54一起构成三节点连杆机构。
在该连杆机构中,连接部54起固定连杆的作用,伸缩连杆部55沿图中箭头#1的方向延伸,从而如图3所示,第二腿部52被附接到的第一腿部51被提升,以便从地面侧被向上推。
以下,将图3所示的着陆装置30的状态称为腿提升状态。在无人机1的飞行期间,通过使着陆装置30进入腿提升状态,可以防止着陆装置干扰航空摄影相机的成像。
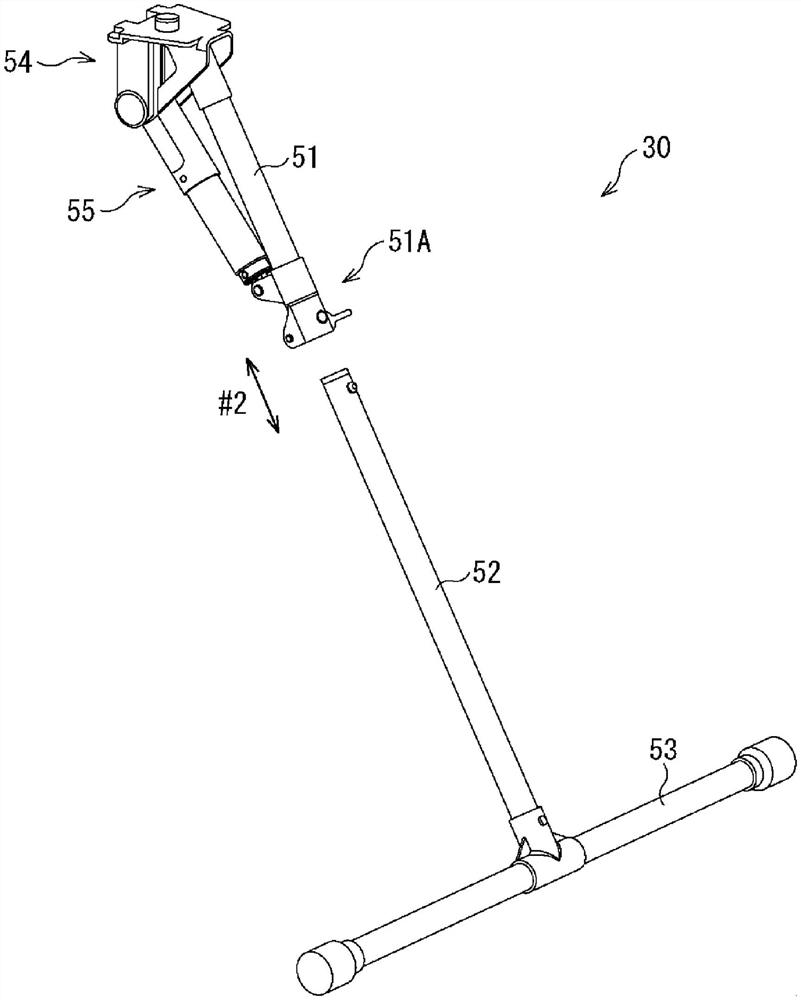
此外,如图4所示,在着陆装置30中,第二腿部52被附接至附接构件51A(第一腿部51的第二端部),以便沿图中箭头#2的方向可拆卸。
如上所述,由于着陆装置30被配置为使得在能够通过伸缩连杆部55提升和降低的第一腿部51的远端侧的第二腿部52是可拆卸的,因此与着陆装置不能从主体拆卸的配置相比,可以显著缩短在收纳无人机1时着陆装置30的长度。即,可以以紧凑的方式收纳无人机1。
<3.附接构件的配置>
以下,将描述附接构件51A的配置。
图5和图6是示出附接构件51A的配置示例的透视图。
在腿降低状态下的着陆装置30中,当图2所示的表面为前侧时,图5示出从前侧观察的附接构件51A和第二腿部52,图6示出从后侧观察的附接构件51A及第二腿部52。
在图5和图6中,第二腿部52处于从附接构件51A分离的状态,并且示出了第二腿部52的嵌合到附接构件51的嵌合部52f。此外,形成为中空管状(具体地,中空圆筒形)的第二腿部52的远端(第一腿部51侧的端部)用例如包含树脂的帽52c密封。
附接构件51A包括保持部111、调整部112和锁定孔113。
保持部111为中空管状,并且包含树脂、诸如Al之类的金属等,保持部111的约一半与第一腿部51的端部接合。第二腿部52的嵌合部52f通过被嵌合到保持部111的剩余一半的内径而附接到附接构件51A。
调整部112调整保持部111的内径以紧固第二腿部52的嵌合部52f。具体地,如图6所示,保持部111在周向的一部分(后侧)处具有间隙111s,调整部112通过改变间隙111s的宽度来调整保持部111的内径。
这里,将参照图7描述保持部111和调整部112的细节。
图7示出了从附接第二腿部52的一侧观察的保持部111的剖视图以及调整部112。
如图7所示,保持部111具有一对突出部111p和111q,该对突出部从间隙111s的两端沿径向突出并跨间隙111s彼此面对。调整部112通过跨过间隙111s而穿过一对突出部111p和111q的螺纹构件来改变间隙111s的宽度。
更具体地,在突出部111p和111q中形成跨过间隙111s而穿过一对突出部111p和111q的通孔,并且在该通孔中形成阴螺纹部151,以比间隙111s更靠近深度侧(突出部111q侧)。调整部112包括杆171,并且包括拧到阴螺纹部151的阳螺纹部172,即,杆171被配置为夹紧杆,并且通过杆171沿图5中的箭头#3的方向旋转而将阳螺纹部170拧紧到阴螺纹部151,使得间隙111s的宽度减小。随着间隙111s的宽度减小,保持部111的内径减小,并且第二腿部52的嵌合部52f被紧固。
通过这样的结构,仅通过旋转杆171来调整保持部111的内径,从而可以更容易地附接和拆卸第二腿部52。
注意,在本实施例中,杆171(调整部112)被配置为夹紧杆,但可以包括诸如凸轮杆或棘轮杆之类的紧固机构。
此外,如图5所示,在第二腿部52的嵌合部52f的前侧设置具有凸形状(按钮形状)的突起部131。
如图8所示,在第二腿部52的嵌合部52f嵌合到保持部111的状态下,突起部131被锁定到形成在第一腿部51的前侧的锁定孔113。
突起部131在形成为中空管状的第二腿部52的筒中被弹性体沿第二腿部52的径向按压,从而突起到第二腿部52的嵌合部52f。
图9是用于描述突起部131的结构的侧剖视图。
帽52c在形成为中空管状的第二腿部52的远端内从第二腿部52的远端起被密封到预定深度。在盖52c中形成有突起部131能够滑动的孔191。
孔191设置有弹簧192,该弹簧192沿第二腿部52的径向按压突起部131。突起部131的上端部通过从第二腿部52的嵌合部52f露出以可推动而被锁定到锁定孔113,通过将突起部131的上端部推入第二腿部52的筒内,解除与锁定孔113的锁定。注意,可以使用其他弹性体来代替弹簧192。
如上所述,即使在通过调整部112调整保持部111的内径而紧固第二腿部52的嵌合部52f的情况下,第二腿部52也可能由于紧固松动、忘记紧固或紧固不足而在无人机1的飞行期间脱落。
因此,通过设置用于将第二腿部52的突起部131锁定到附接构件51A的锁定孔113的机构,可以防止第二腿部52在无人机1的飞行期间脱落。
<4.伸缩连杆部的配置和操作>
在下文中,将描述伸缩连杆部55的配置和操作。
图10和图11是示出伸缩连杆部55的配置示例的侧视图。图10示出了腿降低状态下的伸缩连杆部55,图11示出了腿提升状态下的伸缩连杆部55。
伸缩连杆部55包括形成为中空管状的连杆固定部211和连杆可动部212。
连杆固定部211的一端连接到连接部54。连杆固定部211的另一端设置有开口,连杆可动部212插入该开口中。
连杆可动部212形成为其外径小于连杆固定部211的内径,并沿连杆固定部211的轴向可滑动地插入连杆固定部211的开口中。
即,在连杆可动部212相对于连杆固定部211滑动的情况下,伸缩连杆部55伸缩,使得第一腿部51能够被提升和降低。具体地,在连杆可动部212收纳在连杆固定部211中的情况下,伸缩连杆部55收缩,使得着陆装置30处于腿降低状态。此外,连杆可动部212从连杆固定部211的内部露出,并且伸缩连杆部55伸长,使得着陆装置30处于腿提升状态。
在伸缩连杆部55的内部设置有线性致动器,在驱动线性致动器的情况下,连杆可动部212相对于连杆固定部211滑动,使得第一腿部51被提升和降低。
图12和图13是示出伸缩连杆部55的内部结构示例的侧剖视图。图12示出了腿降低状态下的伸缩连杆部55,图13示出了腿提升状态下的伸缩连杆部55。
连杆固定部211包括壳体221和222、马达231、齿轮箱232和阳螺纹部233。此外,连杆可动部212包括壳体241和阴螺纹部242。上述线性致动器通过马达231、齿轮箱232、阳螺纹部233和阴螺纹部242实现。
连杆固定部211的壳体221形成为中空管状,其一端与连接部54连接。壳体222接合到壳体221的另一端。壳体222也形成为中空管状,在壳体222的未接合壳体221侧的一端处设置连杆可动部212的壳体241插入的开口。壳体221和222可以一体地形成。
在壳体221和222(连杆固定部211)内部,从连接部54侧起依次设置马达231、齿轮箱232和阳螺纹部233。
马达231和齿轮箱232旋转地驱动沿壳体221和222的轴向延伸的阳螺纹部233。
用于将马达231的驱动力传递到阳螺纹部233的多个齿轮设置在齿轮箱232的内部。齿轮箱232被配置为相对于马达231的旋转力产生制动力的减速机构,并且设置在齿轮箱内部的多个齿轮可以采用正齿轮结构或行星齿轮结构。
在通过齿轮箱232的齿轮传递马达231的驱动力的情况下,阳螺纹部233绕其延伸方向被旋转驱动。经由线束(未示出)从主体10内的控制器和电池单元提供用于驱动马达231的电力和控制信号。
将与阳螺纹部233螺合的阴螺纹部242固定地设置在壳体241内部的在连接部54侧的端部(连杆可动部212)处。阳螺纹部233和阴螺纹部242构成所谓的丝杠(lead screw),并且在阳螺纹部233被马达231旋转驱动的情况下,阴螺纹部242在阳螺纹部233的轴向(延伸方向)上移动。
如上所述,驱动由马达231、齿轮箱232和构成丝杠的阳螺纹部233和阴螺纹部242实现的线性致动器,并且连杆可动部212相对于连杆固定部211滑动,使得第一腿部51能够被提升和降低。
注意,伸缩连杆部55的伸缩机构不限于上述结构,可以采用其他结构。
本技术的实施例不限于上述实施例,并且可以在不脱离本技术的要点的情况下进行各种修改。
此外,说明书中描述的效果仅仅是示例,不受限制,并且可以具有其他效果。
此外,本公开可以具有以下配置。
(1)一种着陆装置,包括:
第一腿部,第一腿部能够以在无人航空器的主体侧的第一端部为轴摆动;以及
第二腿部,第二腿部可拆卸地附接到第一腿部的第二端部,使得第二腿部在第一腿部的轴向方向上延伸。
(2)(1)中所述的着陆装置,还包括:
伸缩连杆部,伸缩连杆部与所述第一腿部一起构成连杆机构,并提升和降低所述第二腿部附接到的第一腿部。
(3)(1)或(2)中所述的着陆装置,还包括:
附接构件,附接构件被设置在所述第一腿部的所述第二端部处并且具有呈中空管状的保持部,
其中,所述第二腿部嵌合到所述保持部的内径。
(4)(3)中所述的着陆装置,
其中所述附接构件具有调整部,所述调整部调整所述内径,使得所述第二腿部的嵌合部被紧固。
(5)(4)中所述的着陆装置,
其中,所述保持部在周向上的一部分处具有间隙,以及
调整部通过改变间隙的宽度来调整内径。
(6)(5)中所述的着陆装置,
其中,所述保持部具有从所述间隙的两端沿径向突出并跨所述间隙彼此面对的突出部,以及
所述调整部通过跨过所述间隙而穿过所述突出部的螺纹构件改变所述间隙的宽度。
(7)(6)中所述的着陆装置,
其中所述调整部包括杆,所述杆具有螺合到阴螺纹部的阳螺纹部,所述阴螺纹部形成在跨过所述间隙而穿过突出部的所述通孔中的比所述间隙更靠近深度侧。
(8)(7)中所述的着陆装置,
其中所述杆是夹紧杆。
(9)(7)中所述的着陆装置,
其中所述杆是凸轮杆。
(10)(4)至(9)中任一项所述的着陆装置,
其中,所述附接构件还具有锁定孔,所述锁定孔锁定被设置于所述第二腿部的嵌合部的呈凸状的突起部。
(11)(10)中所述的着陆装置,
其中,所述突起部在形成为中空管状的所述第二腿部的筒中被弹性体沿径向按压以突起到所述嵌合部。
(12)(2)至(11)中任一项中所述的着陆装置,
其中所述伸缩连杆部通过线性致动器伸缩,以提升和降低所述第二腿部附接到的所述第一腿部。
(13)(12)中所述的着陆装置,
其中所述线性致动器包括马达和丝杠。
参考符号列表
1无人机
30着陆装置
51第一腿部
51A附接构件
52第二腿部
53接地部
54连接部
55伸缩连杆部
111保持部
111p、111q突出部
111s间隙
112调整部
113锁定孔
131突起部
151阴螺纹部
171杆
172阳螺纹部
191孔
192弹簧
211连杆固定部
212连杆可动部
231马达
232齿轮箱
233阳螺纹部
242阴螺纹部