光检测和测距系统
文献发布时间:2023-06-19 18:32:25
技术领域
本文公开的主题涉及光检测和测距(Light Detection and Ranging,LiDAR)系统。更具体地,本文公开的主题涉及一种包括读出架构的LiDAR系统,其中该读出架构提供自动照射点检测特征(automatic illuminated spot detection feature),并且通过使用读取组(reading-group,RG)单元实现片上直方图和峰值强度检测。
背景技术
对于实施增强/虚拟(AR/VR)应用的移动应用来说,非常需要中范围(高达10m)的高质量深度信息。使用单光子雪崩二极管(single-photon avalanche diode,SPAD)的典型直接飞行时间(direct time-of-flight,dToF)LiDAR系统在户外可能有困难,因为外部环境光往往会恶化直方图质量。为了补偿强环境光,可以使用相对更大的光功率,但是更大的光功率与移动应用的低功率操作相矛盾。
片上直方图和峰值检测生成可能生成大量数据,这也可能与移动应用的低功耗操作相矛盾。提供片上直方图和峰值检测电路系统的典型技术使用大存储器和对应的大电路面积。此外,读取整个像素阵列以减少时延需要大量的时间-数字转换器(time-to-digitalconverter,TDC),这也为TDC使用大芯片面积,消耗相对大量的功率,并且使用大存储器来生成直方图。因此,需要极高速度的接口来从整个像素区域输出原始(RAW)数据。
发明内容
示例实施例提供了一种可以包括SPAD阵列和读取组(read group,RG)通道的LiDAR系统。SPAD阵列可以包括至少一个像素读取组,该至少一个像素读取组响应于入射在至少一个像素读取组上的光脉冲而输出检测事件信号。RG通道可以耦接到至少一个像素读取组,其中RG通道可以包括被配置为生成对应于检测事件信号的时间戳信息的TDC,并且RG通道还可以被配置为基于时间戳信息的值使用硬连线寻址将时间戳信息存储在直方图电路的与时间戳信息的值相对应的累加器直方区间(bin)中。在一个实施例中,SPAD阵列可以包括M行像素读取组和N列像素读取组,其中M和N可以是大于0的整数,并且每行像素读取组可以包括K个像素读取组,其中K包括大于0的整数,并且LiDAR系统还可以包括M个RG通道,其中每个RG通道对应于一行像素读取组并且生成该行像素读取组中的L个像素读取组的时间戳信息,其中L可以是大于0的整数并且L≤K。在另一实施例中,SPAD阵列可以包括M行像素读取组和N列像素读取组,其中M和N可以是大于0的整数,并且每行像素读取组可以包括K个像素读取组,其中K可以是大于0的整数,并且LiDAR系统还可以包括J个RG通道,其中J可以是大于0的整数并且J<M,其中每个RG通道对应于至少一行像素读取组并且生成至少一行像素读取组中的L个像素读取组的时间戳信息,其中L是大于0的整数并且L≤K。在又一实施例中,J=M/2,并且J个RG通道可以在交替的读取循环中为J=奇数像素读取组行中的像素读取组和J=偶数像素读取组行中的像素读取组生成时间戳信息。在又一实施例中,SPAD阵列可以包括M行像素读取组和N列像素读取组,其中M和N可以是大于0的整数,并且每行像素读取组可以包括K个像素读取组,其中K可以是大于0的整数,SPAD阵列的像素读取组以锯齿(zigzag)形图案布置。在一个实施例中,该至少一个像素读取组可以包括两个或更多个SPAD单元,并且RG通道还可以包括检测电路,该检测电路被配置为检测该至少一个像素读取组的哪个SPAD单元输出入射在该至少一个像素读取组上的光脉冲的最大强度信号并将该最大强度信号耦接到RG通道的TDC。在另一实施例中,LiDAR系统还可以包括峰值检测电路,该峰值检测电路被配置为输出直方图电路的存储最大累加值的累加器直方区间的指示。在又一实施例中,LiDAR系统还可以包括直方图电路的输入处的相关滤波器电路,该相关滤波器电路可以基于检测事件信号的强度超过预定阈值而被使能。
示例实施例提供了一种可以包括SPAD单元的阵列和J个RG通道的LiDAR系统。SPAD单元的阵列可以被布置成M行像素读取组和N列像素读取组,其中每行像素读取组可以包括K个像素读取组,其中M、N和K可以是大于0的整数,并且其中每个像素读取组可以被配置为响应于入射在像素读取组上的光脉冲而输出检测事件信号。每个RG通道对应于至少一行像素读取组,并且可以包括L个TDC,其中该L个TDC分别被配置为生成与至少一行像素读取组中的L个像素读取组中的每一个的检测事件信号相对应的时间戳信息,其中J和L可以是大于0的整数,J≤M并且L≤K,并且每个RG通道还可以被配置为基于时间戳信息的值使用硬连线寻址将时间戳信息存储在直方图电路的与时间戳信息的值相对应的累加器直方区间中。在一个实施例中,J=M。在另一实施例中,J=M/2,并且J个RG通道在交替的读取循环中为J=奇数像素读取组行中的像素读取组和J=偶数像素读取组行中的像素读取组生成时间戳信息。在又一实施例中,SPAD阵列的像素读取组可以以锯齿形图案布置。在又一实施例中,至少一个像素读取组可以包括两个或更多个SPAD单元,并且对应于该至少一个像素读取组的RG通道还可以包括检测电路,该检测电路可以被配置为检测该至少一个像素读取组的哪个SPAD单元输出入射在该至少一个像素读取组上的光脉冲的最大强度信号并将该最大强度信号耦接到RG通道的TDC。在一个实施例中,LiDAR系统还可以包括峰值检测电路,该峰值检测电路可以被配置为输出直方图电路的存储最大累加值的累加器直方区间的指示。在另一实施例中,LiDAR系统还可以包括直方图电路的输入处的相关滤波器电路,该相关滤波器电路基于检测事件信号的强度超过预定阈值而被使能。
示例实施例提供了一种可以包括SPAD阵列和读取组(RG)通道的LiDAR系统。SPAD阵列可以包括至少一个像素读取组,该至少一个像素读取组响应于入射在该至少一个像素读取组上的光脉冲而输出检测事件信号,其中该至少一个像素读取组可以包括两个或更多个SPAD单元。RG通道可以耦接到该至少一个像素读取组,并且RG通道可以包括检测电路和TDC,该检测电路被配置为检测该至少一个像素读取组的哪个SPAD单元输出入射在该至少一个像素读取组上的光脉冲的最大强度信号,该TDC可以被配置为生成对应于最大强度信号的时间戳信息,并且基于时间戳信息的值使用硬连线寻址将时间戳信息存储在直方图电路的与时间戳信息的值相对应的累加器直方区间中。在一个实施例中,SPAD阵列可以包括M行像素读取组和N列像素读取组,其中M和N可以是大于0的整数,并且每行像素读取组可以包括K个像素读取组,其中K可以包括大于0的整数,并且LiDAR系统还可以包括M个RG通道,其中每个RG通道对应于一行像素读取组并且生成该行像素读取组中的L个像素读取组的时间戳信息,其中L可以是大于0的整数并且L≤K。在另一实施例中,SPAD阵列可以包括M行像素读取组和N列像素读取组,其中M和N可以是大于0的整数,并且每行像素读取组可以包括K个像素读取组,其中K可以是大于0的整数,并且其中LiDAR系统还可以包括J个RG通道,其中J可以是大于0的整数并且J<M,并且每个RG通道对应于至少一行像素读取组并且生成该至少一行像素读取组中的L个像素读取组的时间戳信息,其中L可以是大于0的整数并且L≤K。在又一实施例中,J=M/2,并且J个RG通道在交替的读取循环中为J=奇数像素读取组行中的像素读取组和J=偶数像素读取组行中的像素读取组生成时间戳信息。在又一实施例中,LiDAR系统还可以包括峰值检测电路,该峰值检测电路被配置为输出直方图电路的存储最大累加值的累加器直方区间的指示;以及直方图电路的输入处的相关滤波器电路,该相关滤波器电路可以基于检测事件信号的强度超过预定阈值而被使能。
附图说明
在以下部分中,将参考附图中示出的示例性实施例来描述本文公开的主题的方面,在附图中:
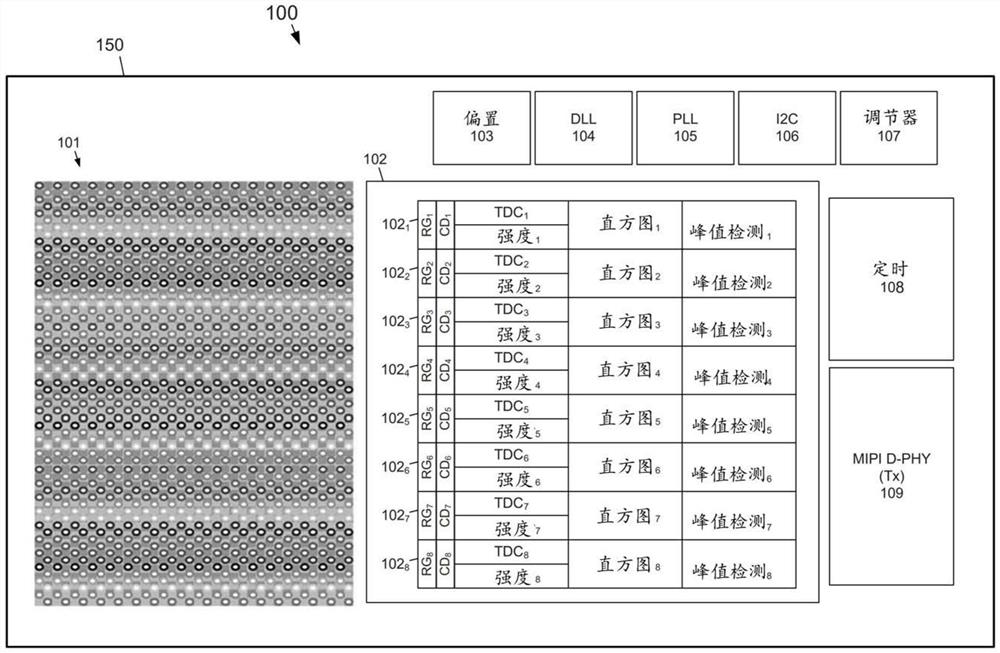
图1A描绘了根据本文公开的主题的调频连续波LiDAR系统的示例实施例的第一示例配置;
图1B描绘了根据本文公开的主题的SPAD单元的示例实施例的示意框图;
图1C是根据本文公开的主题的图像信号处理块的功能框图;
图1D描绘了根据本文公开的主题的RG通道的一部分的示例实施例的框图,其中该RG通道包括TDC、强度计数器、直方图和峰值检测电路;
图1E描绘了根据本文公开的主题的可以用于估计环境强度级别的示例时间序列;
图1F描绘了根据本文公开的主题的关于精细直方图直方区间的宽度的三种示例类型的相关滤波器选通配置;
图1G描绘了根据本文公开的主题的LiDAR系统的第二示例配置;
图2A和图2B描绘了根据本文公开的主题的SPAD阵列的像素读取组和读取组通道的通道的第一示例组织布置;
图3描绘了根据本文公开的主题的SPAD阵列的像素读取组和读取组电路系统的通道的第二示例组织布置;并且
图4描绘了根据本文公开的主题的包括具有读出架构的LiDAR系统的电子设备,其中该读出架构提供自动照射点检测特征,并且通过使用RG单元实现片上直方图和峰值强度检测。
具体实施方式
在以下详细描述中,阐述了许多具体细节,以便提供对本公开的透彻理解。然而,本领域技术人员将理解,所公开的方面可以在没有这些具体细节的情况下实践。在其他情况下,没有详细描述公知的方法、过程、组件和电路,以免模糊本文公开的主题。
在整个说明书中,对“一个实施例”或“实施例”的引用意味着结合该实施例描述的特定特征、结构或特性可以被包括在本文公开的至少一个实施例中。因此,短语“在一个实施例中”或“在实施例中”或“根据一个实施例”(或具有类似含义的其他短语)在本说明书各处的出现不一定都指同一实施例。此外,在一个或多个实施例中,特定的特征、结构或特性可以以任何合适的方式组合。在这点上,如本文所使用的,词语“示例性”意味着“用作示例、实例或说明”。本文描述为“示例性”的任何实施例都不应被解释为比其他实施例必然更优选或更有利。此外,在一个或多个实施例中,特定的特征、结构或特性可以以任何合适的方式组合。此外,根据本文讨论的上下文,单数术语可以包括对应的复数形式,而复数术语可以包括对应的单数形式。类似地,带连字符的术语(例如,“二维的(two-dimensional)”、“预定的(pre-determined)”、“像素特定的(pixel-specific)”等)有时可以与对应的不带连字符的版本(例如,“二维的(two dimensional)”、“预定的(predetermined)”、“像素特定的(pixel specific)”等)互换使用,并且大写条目(例如,“计数器时钟(Counter Clock)”、“行选择(Row Select)”、“像素输出(PIXOUT)”等)可以与对应的非大写版本(例如,“计数器时钟(counter clock)”、“行选择(row select)”、“像素输出(pixout)”等)互换使用。这种偶尔的可互换使用不应被视为彼此不一致。
此外,根据本文讨论的上下文,单数术语可以包括对应的复数形式,而复数术语可以包括对应的单数形式。还要注意的是,本文示出和讨论的各种附图(包括组件图)仅用于说明的目的,并未按比例绘制。例如,为了清楚起见,一些元件的尺寸可能相对于其他元件被夸大。此外,如果认为合适,在附图中重复使用附图标记来表示对应和/或类似的元件。
本文使用的术语仅用于描述一些示例实施例的目的,并不旨在限制所要求保护的主题。如本文所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文清楚地另有指示。还将理解,术语“包括”和/或“包含”在本说明书中使用时,指定所陈述的特征、整数、步骤、操作、元件和/或组件的存在,但不排除一个或多个其他特征、整数、步骤、操作、元件、组件和/或其组合的存在或添加。
应当理解,当元件或层被称为在另一元件或层上、“连接到”或“耦接到”另一元件或层时,它可以直接在另一元件或层上、连接到或耦接到另一元件或层,或者可以存在中间元件或层。相反,当元件被称为“直接在另一元件或层上”、“直接连接到”或“直接耦接到”另一元件或层时,不存在中间元件或层。相同的数字始终指代相同的元件。如本文所使用的,术语“和/或”包括一个或多个相关列出项目的任何和所有组合。
如本文所使用的,术语“第一”、“第二”等用作它们后面的名词的标签,并且不暗示任何类型的排序(例如,空间、时间、逻辑等),除非明确地如此定义。此外,可以跨两个或更多个附图使用相同的附图标记来指代具有相同或相似功能的部件、组件、块、电路、单元或模块。然而,这种用法仅仅是为了简化说明和便于讨论;这并不意味着这些组件或单元的构造或架构细节跨所有实施例都是相同的,或者这些共同引用的部分/模块是实施本文公开的一些示例实施例的唯一方式。
除非另有定义,否则本文使用的所有术语(包括技术和科学术语)具有与本主题所属领域的普通技术人员通常理解的含义相同的含义。还应当理解,术语,诸如在常用词典中定义的那些术语,应当被解释为具有与它们在相关领域的上下文中的含义一致的含义,并且除非在本文中明确定义,否则不应当以理想化或过于正式的意义来解释。
如本文所使用的,术语“模块”指的是被配置为提供本文结合模块描述的功能的软件、固件和/或硬件的任何组合。例如,软件可以体现为软件包、代码和/或指令集或指令,并且在本文描述的任何实施方式中使用的术语“硬件”可以包括例如单独的或任意组合的封装件、硬连线电路系统、可编程电路系统、状态机电路系统和/或存储由可编程电路系统执行的指令的固件。这些模块可以共同地或单独地体现为形成更大系统(例如但不限于集成电路(IC)、片上系统(SoC)、封装件等)的一部分的电路系统。
本文公开的主题提供了一种具有读出架构的LiDAR系统,其中该读出架构提供自动照射点(automatic illuminated spot)检测特征,并且通过使用读取组(RG)单元实现片上直方图和峰值强度检测。RG单元使用减少数量的TDC,这最小化了电路系统面积和功耗。还使用了减少数量的直方图直方区间,这进一步最小化了电路系统面积和功耗。因此,低功率、高速读出架构在没有显著延迟的情况下提供深度信息。读出架构还可以消除环境光影响,这增加了检测范围。此外,动态相关滤波器(例如,箱式滤波器(box-filter))功能可以用于改善大于约10m的距离的检测范围。动态相关滤波器功能还具有自动开/关操作模式,该模式不会恶化非常强的信号在较短距离处的范围测量质量。
本文公开的主题还提供了一种直方图技术,该直方图技术使用减小的粗略(coarse)直方区间大小和硬连线译码地址而不是存储器来对每个直方区间的事件进行计数。累加器(计数器)对每个粗略直方区间的事件进行计数。可以在直方图直方区间之前使用粗略相关滤波器。通过仅通过对传入事件信号使用精细相关滤波器来对最高峰值粗略直方区间的全局级别的传入事件信号进行计数,来提供精细(fine)直方区间累加。
图1A描绘了根据本文公开的主题的调频连续波(frequency-modulatedcontinuous-wave,FMCW)LiDAR系统100的示例实施例的第一示例配置。LiDAR系统100可以包括SPAD像素阵列101、读取组通道(Read-Group Channel,RGC)102、偏置电路系统103、延迟锁定环(delay-locked loop,DLL)104、锁相环(phase-locked loop,PLL)105、I2C通信接口106、功率调节器107、定时电路系统108和移动工业处理器(Mobile IndustryProcessor,MIPI)D-Phy接口109。在一个实施例中,LiDAR系统100的各种组件可以体现为模块。
SPAD像素阵列101可以包括SPAD单元110的2D阵列。图1B描绘了根据本文公开的主题的SPAD单元110的示例实施例的示意框图。如本文所使用的,术语SPAD单元和SPAD像素是可互换的。SPAD单元110可以包括SPAD 111、电阻器112、电平移动和信号调节电路113、开关114和使能电路115。SPAD 111的阴极端子可以耦接到电压源Vcc,并且SPAD 111的阳极端子可以耦接到电阻器112的第一端子。电阻器112的第二端子可以耦接到接地节点。SPAD 111的阳极和电阻器112的第一端子可以耦接到电平移动和调节电路113的输入。电平移动和调节电路113的输出可以耦接到开关114的输入。使能电路115可以包括与非门116和反相器117。与非门116可以接收列使能信号col_en和行使能信号row_en。与非门116的输出和反相器117的输出分别耦接到开关114的两个不同的控制输入。
SPAD像素阵列101可以使用SPAD像素,该SPAD像素通过使用n+掩埋层被配置用于像素共享,该n+掩埋层增加像素填充因子,同时还最小化倍增区域(multiplicationregion)以降低暗计数率(dark count rate,DCR)。可以在共享像素组之间使用金属填充的深沟槽隔离区域来减少串扰。此外,SPAD单元110可以是正面照射(front-sideilluminated,FSI)或背面照射(back-side illuminated,BSI)像素,这允许FSI/BSI堆叠制造工艺。
回到图1A,RGC 102被描绘为包括八个通道的读取组(RG)102
每个RG通道102
偏置电路系统103、DLL 104、PLL 105、I2C通信接口106、功率调节器107、定时电路系统108和MIPI D-Phy接口109可以为LiDAR系统100提供基础设施支持,并且可以位于与SPAD像素阵列101相同的芯片(或管芯)上,如图1A所示。
对于LiDAR系统100的第一示例配置,2D/3D图像信号处理(image signalprocessing,ISP)块可以位于与图1A中描绘的组件分离的芯片上。图1C是根据本文公开的主题的ISP块120的功能框图。ISP块120可以包括环境估计块121、校准块122、去噪块123、直方图和峰值检测块124、图像裁剪到3D视场(field of view,FOV)块125、3D融合到2D图像块126和对象检测块127。
图1D描绘了根据本文公开的主题的RG通道的一部分的示例实施例的框图,其中该RG通道包括TDC、强度计数器、直方图和峰值检测电路。TDC和强度计数器接收SPAD输出。TDC为SPAD输出生成时间戳数据。强度计数器生成光子检测事件的计数,该计数可以用于使能粗略相关滤波器来改善弱信号的直方图质量。当被使能时,粗略相关滤波器选通(gate)输入到直方图电路的时间戳数据。直方图电路将时间戳数据累加到直方区间中,并确定具有峰值的直方区间。在已经确定了粗略峰值直方区间之后,通过对输入事件信号使用精细相关滤波器,精细相关滤波器可以在全局级别仅用于最高峰值(粗略)直方区间。
强度计数器可以被配置为对从PRG输出的光子检测事件进行计数。图1E描绘了可以用于估计环境强度级别的示例时间序列130。在第一预定时间段t
图1F描绘了根据本文公开的主题的关于精细直方图直方区间的宽度(箱(box)宽度)的三种示例类型的相关滤波器选通配置。为了参考目的,沿入射信号时间线示出了精细直方图直方区间的宽度。所有三种相关滤波器的选通宽度都是可调的,以提供最佳相关滤波。在确定粗略直方图的峰值直方区间时,可以使用粗略相关滤波器。在确定了峰值直方区间之后,可以使用精细相关滤波器。
类型1相关滤波器可以被对准,使得选通宽度的下降沿对应于相关滤波器预期通过的最大ToF,并且相对于峰值检测的对应粗略/精细程度的预期示例最大ToF的精细直方图直方区间示出。类型2相关滤波器可以被对准,使得选通宽度的上升沿对应于相关滤波器预期通过的最小ToF,并且相对于峰值检测的对应粗略/精细程度的预期示例最小ToF的精细直方图直方区间示出。类型3相关滤波器可以被对准以针对峰值检测的对应粗略/精细程度跨越相关滤波器预期通过的标称ToF。
直方图电路可以使用具有硬连线寻址的累加器来代替直方图存储器。在一个实施例中,RG通道的直方图电路可以包括128个直方区间。硬连线寻址基于从TDC输出的ToF值将ToF值存储到适当的直方区间中。也就是说,基于ToF值,使用硬连线寻址,不同范围的ToF值被引导到对应的不同直方图直方区间。可以通过先前峰值累加器直方区间与传入时间戳的全局比较来提供峰值检测,以确定具有峰值的累加器直方区间的更新位置。当峰值累加器达到阈值时,从所有累加器直方区间中减去预定值,以降低累加器的位深度。
图1G描绘了LiDAR系统100的第二示例配置,其中SPAD阵列101可以位于第一芯片160上,并且图1A中描绘的包括2D/3D ISP块120的其他组件位于第二芯片161上。这与位于芯片150上的SPAD阵列101和图1A中描绘的其他组件形成对比,并且其中ISP块120位于第二芯片(未示出)上。图1G中描绘的第二示例配置可以体现为芯片到芯片(chip-to-chip,C2C)配置。类似于LiDAR系统100的第一示例配置,用于第二示例配置的SPAD单元可以是正面照射(front-side illuminated,FSI)或背面照射(back-side illuminated,BSI)像素。
图2A和图2B描绘了根据本文公开的主题的SPAD阵列101的PRG和读取组通道102的通道的第一示例组织布置。如图2A所示,SPAD单元的4×4块形成单个PRG 201。SPAD阵列101的PRG行1的前三列中的三个PRG 201
对于该组织示例,每个SPAD单元的4×4块由SPAD单元的四个2×2的更小块形成。2×2块的SPAD单元可以被配置用于像素共享,使得当选择2×2块时,输出形成2×2块的所有四个SPAD单元的组合。在一个实施例中,像素阵列101的PRG可以以锯齿形或棋盘形(checkerboard)图案布置,以最大化像素阵列的空间分辨率。在另一实施例中,像素阵列的SPAD像素可以以锯齿形图案布置。在又一实施例中,像素阵列的像素和/或PRG可以以正方形或矩形图案布置。
图2B描绘了在SPAD阵列101的PRG行2的前三列中形成PRG 200
每个RG通道102
在第一读取循环中,读取由PRG的每一行中的前三列(即,列1-3)中的每一列中的SPAD单元的4×4块形成的PRG,以确定一行中的SPAD单元的4×4块是否检测到对象。读取循环还包括由图1D所示的电路系统进行的处理。在第二读取循环中,读取由PRG的每一行中的接下来的三列(即,列4-6)中的每一列中的SPAD单元的4×4块形成的PRG,以确定一行的接下来的三列中的SPAD单元的读取组是否检测到对象。读取循环继续,直到所有列都被读取。在一个实施例中,可以重复读取循环,例如,几百到几千次,以通过平均来提供滤波。
图3描绘了根据本文公开的主题的SPAD阵列301的PRG和读取组电路系统302的通道的第二示例组织布置。SPAD阵列301可以被配置为包括PRG303的36×60阵列,其中每个PRG由SPAD单元304的2×2块形成。2×2SPAD单元块304可以被配置用于像素共享。
如图3的放大部分所示,形成PRG 303的SPAD单元的每个2×2块304可以被阵列中不是PRG 303的一部分的其他SPAD单元304包围。对于该示例实施例,有18个奇数编号的PRG行、18个偶数编号的PRG行和18个RG通道302
该示例组织布置与图2A和图2B中描绘的第一组织布置的不同之处在于三个PRG303彼此不直接相邻。相反,对于该实施例,三个PRG 303可以沿PRG行通过预定数量的中间PRG 303彼此物理分隔开。对于图3所示的示例,PRG 303通过十(10)个PRG分隔开。PRG 303也可以以锯齿形图案布置,以最大化SPAD阵列301的PRG的空间分辨率。
形成PRG 303的2×2SPAD单元块在图3中由深色方块表示。作为LiDAR系统的一部分但未示出的光学器件可以被配置为将光聚焦到阵列301的选定区域305上,如圆形所表示的。在一个实施例中,光被聚焦到其上的选定区域305可以是通过光学器件的设计而预先确定的区域。在另一实施例中,区域305的位置可以在校准阶段被确定和学习。此外,可以通过学习区域305的位置来补偿差异和制造不对准。
RG通道302可以包括奇数/偶数行译码器306、列译码器307、X-start寄存器308和Y-start寄存器309。应当理解,RG通道302包括与图1A-图1E中描述的RG通道相同的组件。RG通道302
列译码器307可以选择PRG 303所在的特定像素列。X-start寄存器308和Y-start寄存器309可以根据是奇数编号的还是偶数编号的行和列被寻址来分别存储行和列位置信息。
尽管图3所示的组织布置是从右到左描绘的,与图2A和图2B所描绘的从左到右的组织布置相反,但是组织布置中的操作流程是相同的。也就是说,操作流程从SPAD像素开始,流经RG通道以提供强度和峰值输出(图1D)。
在第一读取循环中,所有奇数编号的PRG行的三个PRG 303通过奇数/偶数行译码器306分别耦接到对应RG通道的TDC
在第二读取循环中,所有偶数编号的PRG行的三个PRG 303分别耦接到对应RG通道的TDC
在第三读取循环中,所有奇数编号的PRG行的接下来的三个PRG 303分别耦接到对应RG通道的TDC
在第四读取循环中,所有偶数编号的PRG行的接下来的三个PRG 303分别耦接到对应RG通道的TDC
在第五读取循环中,所有奇数编号的PRG行的接下来的三个PRG 303分别耦接到对应RG通道的TDC
读取循环继续,直到奇数编号的和偶数编号的PRG行的所有30列都被读取。对于该示例,将有十个奇数编号的行读取循环和十个偶数编号的行读取循环。在一个实施例中,可以重复读取循环,例如,几百到几千次,以通过平均来提供滤波。在另一实施例中,可以在读取所有偶数编号的PRG行之前读取所有奇数编号的PRG行。
应当注意,图2A和图2B的操作序列涉及列读取序列——一次三个PRG——并且其中针对每个列序列读取所有行。图3的操作序列也涉及列读取,但也涉及奇数/偶数行读取序列。
图4描绘了根据本文公开的主题的包括具有读出架构的LiDAR系统的电子设备400,其中该读出架构提供自动照射点检测特征,并且通过使用RG单元实现片上直方图和峰值强度检测。电子设备400可以包括控制器(或CPU)410、输入/输出设备420(诸如但不限于小键盘、键盘、显示器、触摸屏显示器、相机和/或图像传感器)、存储器430、接口440、GPU450、图像处理单元460和神经处理单元470,它们通过总线480彼此耦接。控制器410可以包括例如至少一个微处理器、至少一个数字信号处理器、至少一个微控制器等。存储器430可以被配置为存储将由控制器410使用的命令代码或用户数据。
电子设备400和电子设备400的各种系统组件可以包括图像处理单元460,其中该图像处理单元460可以包括具有读出架构的LiDAR系统,该读出架构提供自动照射点检测特征,并且通过使用根据本文公开的主题的RG单元来实现片上直方图和峰值强度检测。接口440可以被配置为包括被配置为使用RF信号向无线通信网络发送数据或者从无线通信网络接收数据的无线接口。无线接口440可以包括例如天线。电子系统400还可以用于通信系统的通信接口协议,例如但不限于码分多址(CDMA)、全球移动通信系统(GSM)、北美数字通信(NADC)、扩展时分多址(E-TDMA)、宽带CDMA(WCDMA)、CDMA2000、Wi-Fi、市政Wi-Fi(Muni Wi-Fi)、蓝牙、数字增强型无绳电信(DECT)、无线通用串行总线(无线USB)、具有无缝切换的快速低时延接入正交频分复用(FlashOFDM)、IEEE 802.20、通用分组无线电业务(GPRS)、iBurst、无线宽带(WiBro)、WiMAX、WiMAX-Advanced、通用移动电信服务-时分双工(UMTS-TDD)、高速分组接入(HSPA)、演进数据优化(EVDO)、长期演进-高级(LTE-Advanced)、多通道多点分发服务(MMDS)、第五代无线(5G)、第六代无线(6G)等等。
本说明书中描述的主题和操作的实施例可以在数字电子电路系统中实施,或者以计算机软件、固件或硬件实施,包括本说明书中公开的结构及其结构等同物,或者在它们中的一个或多个的组合中实施。本说明书中描述的主题的实施例可以被实施为一个或多个计算机程序,即计算机程序指令的一个或多个模块,其被编码在计算机存储介质上,用于由数据处理装置执行或控制数据处理装置的操作。可替换地或附加地,程序指令可以被编码在人工生成的传播信号上,例如,机器生成的电、光或电磁信号,其被生成以编码信息,用于传输到合适的接收器装置,以由数据处理装置执行。计算机存储介质可以是或被包括在计算机可读存储设备、计算机可读存储基底、随机或串行存取存储器阵列或设备或其组合中。此外,虽然计算机存储介质不是传播信号,但是计算机存储介质可以是编码在人工生成的传播信号中的计算机程序指令的源或目的地。计算机存储介质也可以是或被包括在一个或多个单独的物理组件或介质(例如,多个CD、盘或其他存储设备)中。此外,本说明书中描述的操作可以被实施为由数据处理装置对存储在一个或多个计算机可读存储设备上或从其他源接收的数据执行的操作。
虽然本说明书可以包含许多具体的实施方式细节,但是这些实施方式细节不应被解释为对任何要求保护的主题的范围的限制,而是应当被解释为对特定实施例所特有的特征的描述。本说明书中在分开的实施例的上下文中描述的特定特征也可以在单个实施例中组合实施。相反,在单个实施例的上下文中描述的各种特征也可以在多个实施例中分开地或以任何合适的子组合来实施。此外,尽管特征可能在上面被描述为在特定组合中起作用,并且甚至最初被如此要求保护,但是来自所要求保护的组合的一个或多个特征在一些情况下可以从该组合中被删除,并且所要求保护的组合可以针对子组合或子组合的变体。
类似地,虽然在附图中以特定的顺序描述了操作,但是这不应被理解为要求这些操作以所示的特定顺序或连续顺序执行,或者要求所有示出的操作都被执行,以获得期望的结果。在特定情况下,多任务和并行处理可能是有利的。此外,上述实施例中的各种系统组件的分离不应被理解为在所有实施例中都需要这样的分离,并且应当理解,所描述的程序组件和系统通常可以一起集成在单个软件产品中或者封装到多个软件产品中。
因此,本文已经描述了主题的特定实施例。其他实施例在所附权利要求的范围内。在一些情况下,权利要求中阐述的动作可以以不同的顺序来执行,并且仍然实现期望的结果。此外,附图中描绘的过程不一定需要所示的特定顺序或连续顺序来实现期望的结果。在特定实施方式中,多任务和并行处理可能是有利的。
如本领域技术人员将认识到的,本文描述的创新概念可以在广泛的应用范围内修改和变化。因此,所要求保护的主题的范围不应限于以上讨论的任何具体示例性教导,而是由所附权利要求来定义。
- 光检测和测距系统及其驱动方法
- 应用光电振荡器(OEO)的光测距雷达(LIDAR)和光频域反射计(OFDR)系统
- 光束转向装置以及光检测和测距装置
- 脉冲光检测和测距装置、在脉冲光检测和测距系统中对物体进行检测和测距的系统和方法
- 光子集成电路、光检测和测距系统及用于操作光子集成电路、光检测和测距系统的方法