电动工具
文献发布时间:2023-06-19 19:18:24
技术领域
本发明实施例涉及电动工具控制技术领域,尤其涉及一种电动工具。
背景技术
随着电动工具的发展,电动工具的智能化控制技术得到越来越广泛的应用。例如,利用控制器驱动电机实现电动工具的快速启动、平稳刹车等特性。
然而,现有的电动工具由于采样芯片存在上电延时、温漂等固有缺点,导致电机运行时存在一定的电流偏置误差,尤其是在温度过高或过低时更为明显,导致实际采样电流过大,电机的电流不稳定,极易烧坏元器件。
发明内容
本发明提供一种电动工具,以实现对电动工具的电流偏置误差的控制。
本发明实施例提供了一种电动工具,该电动工具包括:
电机;
电流变换模块,用于根据所述电机的三相电流,确定误差补偿模块的输入电流;
速度控制模块,用于根据所述电机的角度,确定第一参考电流;
误差补偿模块,用于根据所述输入电流和所述第一参考电流,确定误差补偿信号;其中,所述误差补偿信号用于调节输出所述输入电流;所述电流变换模块和所述误差补偿模块形成电流误差补偿闭环控制电路;
矢量控制模块,用于根据所述第一参考电流、所述输入电流和所述电机的角度,确定控制信号;
电机驱动模块,用于根据所述控制信号,调节所述电机的电流,以驱动所述电机转动。
可选地,所述输入电流包括第一输入电流和第二输入电流;所述误差补偿模块包括第一加法器、第二加法器和第一滤波单元,所述第一加法器用于将所述第一输入电流经所述第一滤波单元滤波后与所述第一参考电流做差得到第一电流偏差;
所述第二加法器用于将所述第二输入电流经所述第一滤波单元滤波后与第二参考电流做差得到第二电流偏差;其中,所述第一电流偏差用于反馈到所述电流变换模块以调节输出所述第一输入电流,所述第二电流偏差用于反馈到所述电流变换模块以调节输出所述第二输入电流。
可选地,所述第二参考电流为零。
可选地,所述误差补偿模块还包括第一变换单元,所述第一变换单元用于将所述第一电流偏差变换为稳定的第一误差补偿信号输出至所述电流变换模块,以及将所述第二电流偏差变换为稳定的第二误差补偿信号输出至所述电流变换模块。
可选地,所述第一变换单元为park逆变换单元。
可选地,所述电流变换模块包括第二变换单元和第三变换单元,所述第二变换单元用于将所述电机的三相电流转换为两相旋转的电流;所述第三变换单元用于将所述两相旋转的电流转换为两相静止的电流,再基于所述误差补偿信号转换为所述输入电流。
可选地,所述第二变换单元为clark变换单元,所述第三变换单元为park变换单元。
可选地,所述矢量控制模块包括第一电流控制单元、第二电流控制单元、第四变换单元和信号控制单元;所述第一电流控制单元用于根据所述第一参考电流和所述输入电流输出第一参考电压至所述第四变换单元;
所述第二电流控制单元用于根据第二参考电流和所述输入电流输出第二参考电压至所述第四变换单元;
所述第四变换单元用于根据所述第一参考电压、所述第二参考电压和所述电机的角度,输出第三参考电压;
信号控制单元,用于根据所述第三参考电压,输出所述控制信号。
可选地,所述第四变换单元为park逆变换单元。
可选地,所述速度控制模块用于根据所述电机的角度和预设速度调节输出所述第一参考电流。
本发明实施例通过提供一种电动工具。通过该电动工具可以解决相关技术中电动工具运行时存在电流偏置误差导致电机的电流控制不稳定而极易烧坏元器件的情况,使电动工具在工作过程中,通过电流变换模块和误差补偿模块形成电流误差补偿闭环控制电路,将误差补偿模块输出的误差补偿信号正反馈到电流变换模块以调节其输出的输入电流,并将调节输出的输入电流输入到矢量控制模块,矢量控制模块将调节后的输入电流结合第一参考电流和电机的角度调节输出控制信号,进而控制电机的电流,消除电机在运行过程中的电流偏置误差,实现电机在运行过程中的电流稳定平衡,从而增强电机运行的安全性和稳定性。
附图说明
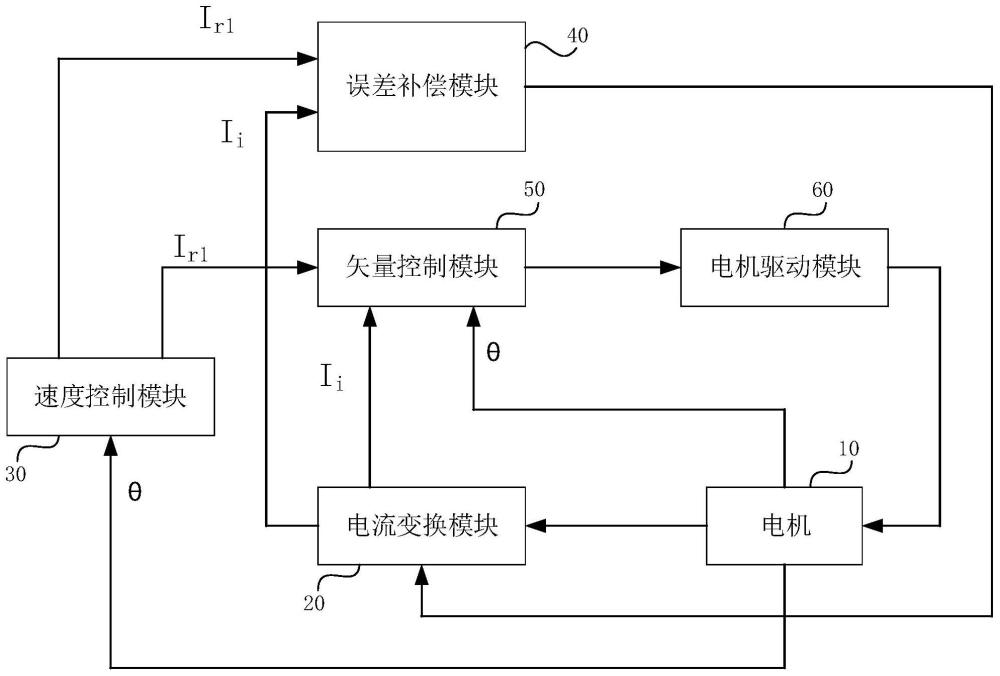
图1是本发明实施例中的一种电动工具的电路结构框图;
图2是本发明实施例中的另一种电动工具的电路结构框图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
图1为本发明实施例中提供的一种电动工具的电路结构框图。参考图1,该电动工具,包括:电机10;电流变换模块20,用于根据电机10的三相电流,确定误差补偿模块40的输入电流I
其中,电机10为三相电机10。电流变换模块20与电机10电连接,用于获取电机10的三相电流,并根据电机10的三相电流输出输入电流I
在本实施例的技术方案中,电动工具可以为割草机、电钻等。示例性的,结合图1,以电动工具为割草机为例,由于采样芯片存在上电延时、温漂等固有缺点,割草机在运行时存在一定的电流偏置误差,尤其是在温度过高或过低时更为明显,导致实际采样电流过大,电机的电流不稳定,极易烧坏MOS管等元器件。为此,本发明实施例提供的电动工具,可以实现:在割草机运行过程中,电流变换模块20将电机10输出的三相电流转换为输入电流I
本实施例的技术方案,通过提供一种电动工具。该电动工具包括电机;电流变换模块,用于根据电机的三相电流,确定误差补偿模块的输入电流;速度控制模块,用于根据电机的角度,确定第一参考电流;误差补偿模块,用于根据输入电流和第一参考电流,确定误差补偿信号;其中,误差补偿信号用于调节输出输入电流;电流变换模块和误差补偿模块形成电流误差补偿闭环控制电路;矢量控制模块,用于根据第一参考电流、输入电流和电机的角度,确定控制信号;电机驱动模块,用于根据控制信号,调节电机的电流,以驱动电机转动。通过该电动工具可以解决相关技术中电动工具运行时存在电流偏置误差导致电机的电流控制不稳定而极易烧坏元器件的情况,使电动工具在工作过程中,通过电流变换模块和误差补偿模块形成电流误差补偿闭环控制电路,将误差补偿模块输出的误差补偿信号正反馈到电流变换模块以调节其输出的输入电流,并将调节输出的输入电流输入到矢量控制模块,矢量控制模块将调节后的输入电流结合第一参考电流和电机的角度调节输出控制信号,进而控制电机的电流,消除电机在运行过程中的电流偏置误差,实现电机在运行过程中的电流稳定平衡,从而增强电机运行的安全性和稳定性。
图2是本发明实施例中提供的另一种电动工具的电路结构框图。作为一种实施方式,可选地,参考图2,输入电流包括第一输入电流I
其中,第一电流偏差和第二电流偏差为电机的电流偏置误差。将第一电流偏差反馈到电流变换模块20以调节输出第一输入电流I
其中,第一滤波单元41和第二滤波单元42均可以为低通滤波器,用以滤除噪声信号,获得真实的第一参考电流I
可选地,第二参考电流为零。此外,还可以为其他值,具体可根据实际情况进行设置,在此不做具体的限定。
可选地,速度控制模块30用于根据电机10的角度θ和预设速度调节输出第一参考电流I
其中,预设速度为速度控制的目标速度。速度控制模块30实时获取电机10的实际角度θ,并根据角度与速度的关系将电机10的实际角度θ转换为对应的实际速度,然后将实际速度结合预设速度进行比例积分调节输出第一参考电流I
可选地,继续参考图2,误差补偿模块40还包括第一变换单元43,第一变换单元43用于将第一电流偏差变换为稳定的第一误差补偿信号输出至电流变换模块20,以及将第二电流偏差变换为稳定的第二误差补偿信号输出至电流变换模块20。
具体的,第一变换单元43用于结合电机10的角度θ将第一电流偏差变换为稳定的第一误差补偿信号补偿到电流变换模块20,使得电流变换模块20调节输出稳定的第一输入电流I
可选地,第一变换单元为park逆变换单元。
此外,参考图2,误差补偿模块40还包括第三滤波单元44、第四滤波单元45、第一积分单元46和第二积分单元47。其中,第三滤波单元44用于对第一误差补偿信号进行滤波以消除谐波,第四滤波单元45用于对第二误差补偿信号进行滤波以消除谐波,第一积分单元46用于对第一误差补偿信号进行积分消除稳态误差,第二积分单元47用于对第二误差补偿信号进行积分消除稳态误差。由此,可以提高误差补偿的准确性、稳定性和可靠性。
可选地,参考图2,电流变换模块20包括第二变换单元21和第三变换单元22,第二变换单元21用于将电机10的三相电流转换为两相旋转的电流;第三变换单元22用于将两相旋转的电流变换为两相静止的电流,并基于误差补偿信号转换为输入电流。
示例性的,假设电机10为三相电机,设其a轴、b轴和c轴输出的三相电流依次为I
其中,将误差补偿模块40输出的误差补偿信号分别反馈叠加到α轴对应的旋转电流I
可选地,第二变换单元21为clark变换单元,第三变换单元22为park变换单元。
可选地,继续参考图2,矢量控制模块50包括第一电流控制单元51、第二电流控制单元52、第四变换单元53和信号控制单元54;第一电流控制单元51用于根据第一参考电流I
第二电流控制单元52用于根据第二参考电流I
第四变换单元53用于根据第一参考电压V
信号控制单元54,用于根据第三参考电压V
其中,由于电机10输出的三相电流依次经第二变换单元21和第三变换单元22的变换作用后输出为q轴和d轴对应的电流,如I
其中,第一参考电压V
其中,信号控制单元54可以为PWM脉宽调制器,用于对第三参考电压V
在本实施例的技术方案中,该电动工具的实现过程为:示例性的,以电动工具为割草机为例,割草机在运行过程中,第二变换单元21将电机10的三相电流I
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 电动工具系统及电动工具系统的控制方法
- 电动工具控制装置、电动工具、电动工具系统及电动工具控制方法
- 电动工具、电动工具的电源设备及电动工具系统