具有偏转器的传感器总成
文献发布时间:2024-01-17 01:13:28
技术领域
本公开涉及车辆中的传感器总成。
背景技术
车辆可以包括多种传感器。一些传感器检测车辆的内部状态,例如车轮转速、车轮取向以及发动机和变速器值。一些传感器检测车辆的位置或取向,例如全球定位系统(GPS)传感器;加速度计,诸如压电或微机电系统(MEMS);陀螺仪,例如速率陀螺仪、环形激光陀螺仪或光纤陀螺仪;惯性测量单元(IMU);以及磁力计。一些传感器检测外部世界,所述传感器例如雷达传感器、扫描激光测距仪、光探测和测距(激光雷达)装置以及图像处理传感器(诸如,相机)。激光雷达装置通过发射激光脉冲并且测量脉冲行进到对象并返回的飞行时间来检测距对象的距离。
发明内容
一种车辆包括具有顶部边缘的挡风玻璃。所述车辆包括从所述挡风玻璃的所述顶部边缘向后延伸的车顶。所述车辆包括由所述车顶支撑的传感器总成,所述传感器总成包括激光雷达传感器或相机中的至少一个。所述车辆包括偏转器,所述偏转器可从降低位置移动到升高位置并且由所述车顶支撑在位于所述传感器总成的前方并与所述传感器总成间隔开的所述挡风玻璃的所述顶部边缘处。
所述传感器可以包括至少一个相机。
所述传感器总成可以包括壳体以及可相对于所述壳体旋转的激光雷达传感器。
所述激光雷达传感器可以从所述壳体的顶部向上延伸。
所述偏转器可以在所述壳体的前方并且与所述壳体间隔开。
所述偏转器可以比所述壳体宽。
所述偏转器可以沿着车辆横向轴线伸长。
所述挡风玻璃的所述顶部边缘可以从第一端延伸至第二端,并且所述偏转器可以从所述顶部边缘的所述第一端延伸至所述第二端。
所述车辆可以包括在所述车顶和所述偏转器之间的铰链,所述偏转器可围绕所述铰链在所述降低位置和所述升高位置之前移动。
所述铰链可以包括形状记忆合金。
所述铰链可以是活动铰链。
所述偏转器可以沿着车辆横向轴线移动。
所述传感器总成的传感器可以限定视野,在所述升高位置中的所述偏转器在所述视野中,并且在所述降低位置中的所述偏转器在所述视野外部。
所述偏转器对可由所述传感器总成检测到的光而言可以是透明的。
所述车辆可以包括计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于来自雨水传感器的数据使所述偏转器从所述降低位置移动到所述升高位置。
所述车辆可以包括计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于来自车辆速度传感器的数据使所述偏转器从所述降低位置移动到所述升高位置。
附图说明
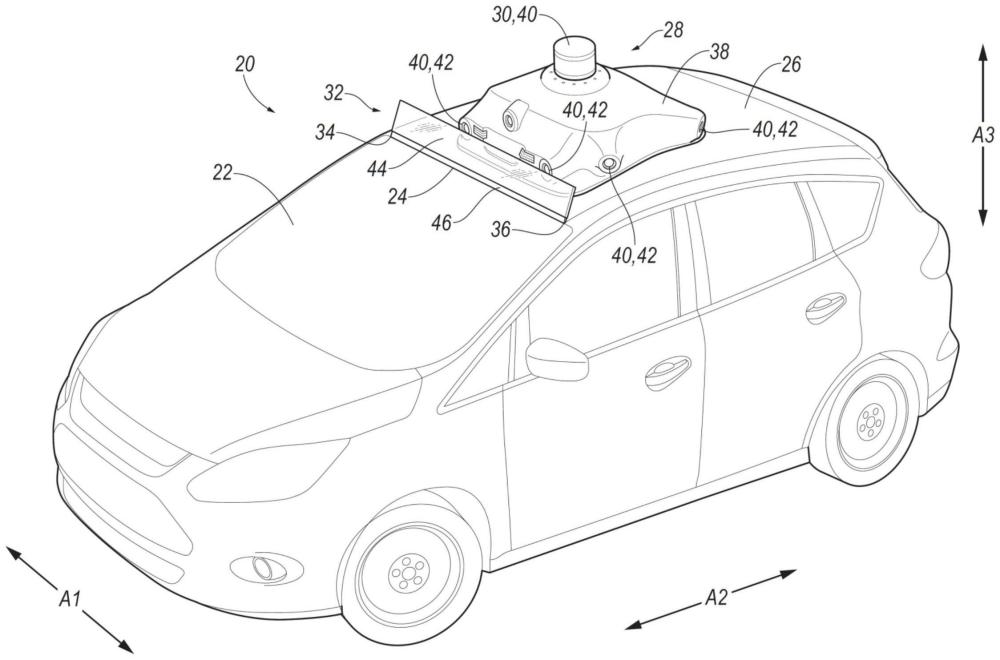
图1是具有偏转器和传感器总成的示例性车辆的透视图。
图2是具有在升高位置中的偏转器的车辆的一部分的侧视图。
图3是具有在降低位置中的偏转器的车辆的一部分的侧视图。
图4是车辆部件的框图。
具体实施方式
参考附图,其中贯穿若干视图,相同的数字指示相同的部分,车辆20包括具有顶部边缘24的挡风玻璃22。车辆20包括从挡风玻璃22的顶部边缘24向后延伸的车顶26。车辆20包括由车顶26支撑的传感器总成28,传感器总成28包括至少一个激光雷达传感器30。车辆20包括偏转器32,所述偏转器可从降低位置移动到升高位置并且由车顶26支撑在位于传感器总成28的前方并与传感器总成间隔开的挡风玻璃22的顶部边缘24处。偏转器32的移动使得偏转器32能够选择性地偏转传感器总成28上方的空气,例如,当检测到雨水时和/或当车辆20以高于阈值速度行进时。将偏转器32支撑在挡风玻璃22的顶部边缘24处使得被挡风玻璃22偏转的空气能够大致连续地被偏转器32偏转,例如,空气可以沿着挡风玻璃22和在升高位置中的偏转器32行进,而不会在其之间中断。将偏转器32与传感器总成28间隔开使得不同的传感器总成28能够用于车辆20和/或传感器总成28在车顶26上的不同安装位置,例如,减少对特定于某个传感器总成28或车辆26上的安装位置的偏转器的可能需要。
车辆20可以是任何合适类型的地面车辆,例如乘用或商用汽车,诸如轿车、双门轿车、卡车、运动型多功能车、跨界车、厢式货车、小型货车、出租车、公共汽车等。
车辆20包括车架。车架可以是一体式结构,其中车架与包括车架纵梁、柱、车顶纵梁等的车身是一体的。作为另一个示例,车身和车架可以具有非承载式车身结构(也称为驾驶室车架分离式结构),其中车身和车架是单独的部件(即,模块化的)并且车身被支撑在车架上并固定到车架。替代地,车架和车身可以具有任何合适的结构。车架和车身可以是任何合适的材料,例如,钢、铝和/或纤维增强塑料等。
车身可以限定乘客舱,以容纳车辆20的乘员(如果有的话)。乘客舱可以延伸跨越车辆20,即,从车辆20的一侧延伸到另一侧。乘客舱包括前端和后端,其中在车辆20的前向移动期间,前端在后端的前方。
车身可以包括车顶26。车辆20的车顶26在乘客舱上方延伸并覆盖乘客舱,例如,为乘客舱的乘员提供遮蔽。车顶26可以包括横梁、外部面板和车顶内衬。横梁支撑外部面板、车顶内衬等。横梁可以是钢、铝、碳纤维或任何其他合适的材料。横梁可以沿着车辆横向轴线A1伸长。车顶内衬和外部面板为车顶26提供A级表面,即具有无瑕疵高品质完整美学外观的专门制造的表面等。
挡风玻璃22设置在乘客舱的前端处。挡风玻璃22可以从车辆20的一侧延伸到车辆20的另一侧。挡风玻璃22可以例如从车辆20的仪表板向上和向后延伸到顶部边缘24。挡风玻璃22的顶部边缘24从第一端34(例如,在车辆20的右侧)延伸到第二端36(例如,在车辆20的左侧)。顶部边缘24可以邻接车顶26。车顶26可以从挡风玻璃22的顶部边缘24向后延伸,例如,沿着垂直于车辆横向轴线A1和车辆竖直轴线A3的车辆纵向轴线A2向后延伸。挡风玻璃22可以从乘客舱面向向前方向。挡风玻璃22可以为任何合适的透明材料,包括玻璃,诸如夹层玻璃和/或钢化玻璃,和/或塑料。
传感器总成28可以收集数据,例如,以自主地和/或半自主地操作车辆20。传感器总成28可以包括传感器壳体38和一个或多个传感器40。传感器总成28可以由车顶26支撑。例如,壳体38可以成形为可附接到车顶26,例如,可以具有与车顶26的轮廓匹配的形状。壳体38可以附接到车顶26,这可为传感器40提供车辆20周围的区域的无障碍视野。壳体38可以由例如塑料或金属形成。传感器总成28可以向后支撑并且与挡风玻璃22的顶部边缘24和偏转器32间隔开。
传感器40可以获得一个或多个物理现象的一个或多个测量值。一些传感器40可以检测车辆20的位置或取向,例如全球定位系统GPS传感器;加速度计,诸如压电或微机电系统MEMS;陀螺仪,例如速率陀螺仪、环形激光陀螺仪或光纤陀螺仪;惯性测量单元IMU;以及磁力计。一些传感器40可以检测外部世界,例如雷达传感器40、扫描激光测距仪、光探测和测距(激光雷达)传感器30以及图像处理传感器,诸如相机42。仅提供几个非限制性示例,传感器数据可以包括用于确定对象的位置、对象的速度、对象的类型、道路的坡度等的数据。
激光雷达传感器30通过发射激光脉冲并测量脉冲行进到对象并返回的飞行时间来检测与对象的距离。激光雷达传感器30可以相对于壳体38旋转。激光雷达传感器30可以例如沿着车辆竖直轴线A3从壳体38的顶部向上延伸。例如,激光雷达传感器30可以在壳体38的最高点处设置在壳体38的顶部上。壳体38可以包括孔口,激光雷达传感器30穿过所述孔口。孔口可以是圆的,例如,具有圆形或略微椭圆形的形状。激光雷达传感器30可以包括基座、马达、感测装置和外壳。外壳封闭感测装置,例如,保护感测装置免受雨水、碎屑等的影响。基座可以附接到壳体38并相对于壳体固定。马达可以附接到基座并相对于基座固定。马达可以可操作地联接到外壳和感测装置,以使外壳和感测装置相对于壳体38旋转。
传感器40中的每一个限定视野FOV。视野FOV是可由相应的传感器40从其检测到光或其他数据介质的体积。例如,激光雷达传感器30的视野FOV可以围绕竖直通路延伸360度,例如,从车辆20的前方、后方和侧面收集数据。视野FOV可以界定在竖直上限与竖直下限之间。作为另一个示例,每个相机42的视野FOV可以界定在竖直上限和竖直下限之间,并且在横向左限和横向右限之间。
偏转器32可以使空气、雨滴、清洗液等偏转,例如,远离车顶26并且在传感器总成28的上方向上偏转。偏转器32由车顶26支撑在位于传感器总成28的前方并与传感器总成间隔开,例如位于壳体38的前方并且与壳体间隔开的挡风玻璃22的顶部边缘24上。偏转器32可以固定到例如车顶26的横梁和/或外部面板。偏转器32可以包括对可由所述传感器总成28检测到的光(例如,由激光雷达传感器30发射和接收的激光和/或由相机42检测到的可见光)而言是透明的主要部分44。例如,主要部分44可以包括玻璃,诸如夹层玻璃和/或钢化玻璃、塑料和/或任何其他合适的材料。
偏转器32可以沿着车辆横向轴线A1伸长。换句话说,偏转器32沿着车辆横向轴线A1的宽度可以大于偏转器32垂直于宽度的长度和高度。偏转器32可以比壳体38宽。例如,偏转器32可以沿着车辆横向轴线A1向车辆外侧延伸超过壳体38的右侧和左侧两者。作为另一个示例,偏转器32可以沿着车辆横向轴线A1从挡风玻璃22的顶部边缘24的第一端34延伸到挡风玻璃22的顶部边缘24的第二端36。
偏转器32可以从降低位置移动到升高位置,且反之亦然。偏转器32可以围绕车辆横向轴线A1移动。例如,车辆20可以围绕车辆横向轴线A1在降低位置与升高位置之间旋转。
参考图2,处于升高位置中的偏转器32可以在传感器总成28的传感器40的视野FOV中。例如,由激光雷达传感器30和/或相机42中的一个或多个检测到的光可以行进穿过路径,所述路径延伸穿过,例如偏转器32的主要部分44。处于升高位置中的偏转器32可以远离车顶26延伸,例如从挡风玻璃22的顶部边缘24向上和向后延伸。例如,当车辆20以阈值速度行进时,处于升高位置中的偏转器32可以在传感器总成28的上方提供直接的空气、雨水、清洗液等。将空气、雨水、清洗液等引导到传感器总成28上方可以提高由传感器总成28收集的数据的质量。例如,在传感器总成28上方指引的空气可以允许传感器总成28的通风口在传感器总成28的传感器40的前方更好地提供空气帘,例如,相对于如果允许空气流入传感器总成28中的情况而言。作为另一个示例,在传感器总成28的上方指引的雨水和清洗液可能不太可能影响传感器40的透镜,例如,相对于如果允许雨水和清洗液流入传感器总成28中的情况而言。
参考图3,处于降低位置中的偏转器32可以在传感器总成的传感器40的视野FOV外部。例如,由激光雷达传感器30和/或相机42检测到的光可以行进穿过路径,所述路径未延伸穿过偏转器32。处于降低位置中的偏转器32可以沿着车顶26延伸,例如从挡风玻璃22的顶部边缘24向后延伸。例如,与升高位置相比,处于降低位置中的偏转器32可以提供较低的风阻和降低的易被损害性或易被弄脏性。
返回到图1至图4,铰链46可以在车顶26与偏转器32之间。铰链46可以连接到车顶26和偏转器32。铰链46使得能够旋转并且抑制偏转器32的平移。换句话说,偏转器32可以围绕铰链46在降低位置和升高位置之间移动。铰链46可以是活动铰链。换句话说,铰链46可以包括变形以允许偏转器32移动的一体式柔性材料。一体式意指没有接缝、接头、紧固件或粘合剂将其保持在一起的单一均匀材料块,即,例如通过从一体坯料机械加工、成型、锻造、铸造、3-D打印等同时一起形成为单个连续单元。相反地,非一体的部件是单独形成的并且随后例如通过螺纹接合、焊接等进行组装。铰链46可以是任何其他合适的类型,例如,包括转向节和铰链销。
铰链46可以包括形状记忆合金。形状记忆合金在冷却时(例如,在标称温度下)可以变形,但是在加热时返回到预变形(“记忆”)形状。预变形形状可以是升高位置。例如,在标称温度下,形状记忆合金可以变形并且偏转器32处于降低位置处(例如,由于偏转器32的重量)。在高于标称的加热温度下,形状记忆合金可以在偏转器32处于升高位置处的情况下返回到预变形开关。形状记忆合金可以包括例如,铜-铝-镍和镍-钛。图4所示的加热装置47可以联接到形状记忆合金。加热装置47可以沿着铰链46的长度延伸。例如,加热装置47可以包括将电流转换成热能的电阻器。电阻器可以可操作地联接到形状记忆合金,以将热能从电阻器传递到形状记忆合金。另外地或替代地,一个或多个其他致动器可以可操作地联接以使偏转器32在降低位置与升高位置之间移动。致动器可以包括线性致动器、伺服机构或任何其他合适的机电和/或液压系统。
车辆20可以包括检测雨水(例如,作为挡风玻璃22上的液滴)的雨水传感器48。雨水传感器48可以例如包括红外光发射器和红外光检测器。可以基于由偏转器32检测到的红外光的减少(例如,由挡风玻璃22上的液滴发射的红外光对红外光的分散或散射引起)来检测在挡风玻璃22上的雨水或其他液滴。雨水传感器48可以包括用于检测车辆20附近或车辆上的雨水的任何其他合适的结构。
车辆20可以包括检测车辆20的速度的速度传感器50。速度传感器50可以包括例如,霍尔效应传感器,所述霍尔效应传感器检测联接到动力传动系统部件,诸如车桥轴、车轮等的环形齿轮所经过的齿。在指定时间量中经过的所检测到的齿的数量可以用于计算环形齿轮的旋转速度和相关联的车辆20速度。速度传感器50可以包括用于检测车辆20的速度的任何其他合适的结构。
车辆20包括计算机52,其具有处理器和存储器。存储器包括一种或多种形式的计算机可读介质,并且存储指令,所述指令可由处理器执行以用于执行包括如本文所公开的操作的各种操作。例如,计算机52可以是具有如上所述的处理器和存储器的通用计算机,和/或可以包括用于特定功能或功能集的电子控制单元ECU或控制器,和/或专用电子电路,所述专用电子电路包括针对特定操作而制造的ASIC(专用集成电路),例如用于处理传感器数据和/或传送传感器数据的ASIC。在另一个示例中,计算机52可以包括FPGA(现场可编程门阵列),所述FPGA是被制造为可由用户配置的集成电路。通常,在电子设计自动化中使用诸如VHDL(超高速集成电路硬件描述语言)的硬件描述语言来描述诸如FPGA和ASIC的数字和混合信号系统。例如,ASIC是基于制造前提供的VHDL编程而制造的,而FPGA内部的逻辑部件可以基于例如存储在电连接到FPGA电路的存储器中的VHDL编程而配置。在一些示例中,处理器、ASIC和/或FPGA电路的组合可以包括在计算机52中。存储器可以是任何类型,例如,硬盘驱动器、固态驱动器、服务器或任何易失性或非易失性介质。存储器可以存储从传感器40、48、50发送的所收集的数据。存储器可以是与计算机52分离的装置,并且计算机52可以经由车辆20中的通信网络54(例如,通过CAN总线、无线网络等)检索由存储器存储的信息。替代地或另外地,存储器可以是计算机52的一部分,例如,作为计算机52的存储器。
计算机52可以包括或可通信地耦合到(例如,经由通信网络54,诸如如下文进一步描述的通信总线)多于一个处理器,例如,包括在诸如传感器40、48、50、电子控制器单元(ECU)等的部件中,所述部件包括在车辆20中,用于监测和/或控制各种车辆部件,例如,动力传动系统控制器、制动控制器、转向控制器等。计算机52通常被布置用于通信网络54上的通信,所述通信网络可以包括车辆20中的总线,诸如控制器局域网CAN等,和/或其他有线和/或无线机制。替代地或另外地,在计算机52实际上包括多个装置的情况下,通信网络54可以用于在本公开中表示为计算机52的装置之间的通信。各种车辆部件,例如,传感器总成28的传感器40、雨水传感器48、速度传感器50等可以经由通信网络54向计算机52提供数据。计算机52可以经由通信网络54命令各种车辆20部件,例如偏转器32的移动。
计算机52可以包括编程以操作以下中的一者或多者:车辆的制动、推进(例如,通过控制内燃发动机、电动马达、混合动力发动机等中的一者或多者来控制车辆20的加速)、转向、气候控制、内部和/或外部灯等,以及确定计算机52(而非人类操作员)是否并且何时控制此类操作。另外,计算机52可以被编程为确定人类操作员是否以及何时控制此类操作。
计算机52可以包括编程以使偏转器32从降低位置移动到升高位置,且反之亦然。例如,计算机52可以通过例如,经由通信网络54将命令传输到加热装置47以增加供应给电阻器的电压和/或电流来将偏转器32移动到升高位置,从而向铰链46的形状记忆合金提供热量。计算机52可以通过将命令传输到加热装置47以降低或消除供应给电阻器的电压和/或电流来将偏转器32移动到降低位置,从而允许铰链46的形状记忆合金返回到标称温度。作为另一个示例,计算机52可以通过向联接到偏转器32的致动器或其他装置传输命令来将偏转器32移动到升高位置或降低位置。命令,例如可以指定线性致动器的长度的增加或减少,可以指定伺服机构的旋转位置等。
计算机52可以包括编程以基于来自雨水传感器48、速度传感器50和/或其他传感器40的数据将偏转器32从降低位置移动到升高位置或从升高位置移动到降低位置。例如,计算机52可以响应于例如经由通信网络54从雨水传感器48接收到指示检测到雨水的信息而将偏转器32从降低位置移动到升高位置。计算机52可以响应于从雨水传感器48接收到指示未检测到雨水的信息而将偏转器32从升高位置移动到降低位置。计算机52可以响应于从速度传感器50接收到指示车辆20超过阈值速度行进的信息而将偏转器32从降低位置移动到升高位置。计算机52可以响应于从速度传感器50接收到指示车辆20低于阈值速度行进的信息而将偏转器32从升高位置移动到降低位置。阈值速度可以是预定的并且存储在例如存储器中。阈值速度可以基于经验测试(诸如风洞测试、计算机52建模等)来预先确定,所述经验测试指示在传感器总成28上方指引由处于升高位置中的偏转器32偏转的空气所在的速度。
已经以说明性方式描述了本公开,并且应理解,已经使用的术语意图具有描述性词语而非限制性词语的性质。形容词“第一”、“第二”、“第三”和“第四”贯穿本文献用作标识符,而不是意在表示重要性、次序或数量。本文中“响应于”、“基于”和“在确定……时”的使用指示因果关系,而不仅仅是时间关系。鉴于以上教导,本公开的许多修改和变化是可能的,并且本公开可以不同于具体描述的其他方式来实践。
根据本发明,提供了一种车辆,所述车辆具有:具有顶部边缘的挡风玻璃;从所述挡风玻璃的所述顶部边缘向后延伸的车顶;由所述车顶支撑的传感器总成,所述传感器总成包括激光雷达传感器或相机中的至少一个;以及偏转器,所述偏转器可从降低位置移动到升高位置并且由所述车顶支撑在位于所述传感器总成的前方并与所述传感器总成间隔开的所述挡风玻璃的所述顶部边缘处。
根据一个实施例,所述传感器总成包括至少一个相机。
根据一个实施例,所述传感器总成包括壳体以及可相对于所述壳体旋转的激光雷达传感器。
根据一个实施例,所述激光雷达传感器从所述壳体的顶部向上延伸。
根据一个实施例,所述偏转器在所述壳体的前方并且与所述壳体间隔开。
根据一个实施例,所述偏转器比所述壳体宽。
根据一个实施例,所述偏转器沿着车辆横向轴线伸长。
根据一个实施例,所述挡风玻璃的所述顶部边缘从第一端延伸至第二端,并且所述偏转器从所述顶部边缘的所述第一端延伸至所述第二端。
根据一个实施例,本发明的特征还在于在所述车顶和所述偏转器之间的铰链,所述偏转器可围绕所述铰链在所述降低位置和所述升高位置之前移动。
根据一个实施例,所述铰链包括形状记忆合金。
根据一个实施例,所述铰链是活动铰链。
根据一个实施例,所述偏转器可围绕车辆横向轴线移动。
根据一个实施例,所述传感器总成的传感器限定视野,处于所述升高位置中的所述偏转器在所述视野中,并且处于所述降低位置中的所述偏转器在所述视野外部。
根据一个实施例,所述偏转器对可由所述传感器总成检测到的光而言是透明的。
根据一个实施例,本发明的特征还在于计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于来自雨水传感器的数据使所述偏转器从所述降低位置移动到所述升高位置。
根据一个实施例,本发明的特征还在于计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于来自车辆速度传感器的数据使所述偏转器从所述降低位置移动到所述升高位置。
- 具有注射器和偏转器的流体动力轴承
- 一种具有侧向力缓冲作用的空气弹簧减震器总成
- 具有偏转器的传感器总成
- 具有偏转器的传感器壳体