控制车辆座椅的步入式操作的方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及一种控制车辆座椅的步入式操作的方法,更具体地,涉及一种与控制车辆座椅的步入式操作的方法相关联的技术,该技术能够在座椅的步入式操作或步入式返回操作期间操作步入式开关时防止错误的步入式操作。
背景技术
通常,假设驾驶员座椅和乘客座椅是第一排座椅,存在一种在第一排座椅的后方设置第二排座椅和第三排座椅的车辆(休闲车)。
在车辆具有第三排座椅的情况下,第二排座椅配备有使乘客能够更方便地坐在第三排座椅上和更方便下车的步入式功能。
座椅的步入式功能是指在第二排座椅位于座椅导轨后方并且椅背直立的初始状态下用户操作步入式开关时,通过使第二排座椅沿座椅导轨向前滑动并且向前旋转和折叠椅背,确保第二排座椅与第三排座椅之间有足够空间的技术。
由于车辆的高品质和便利性规格被认为是重要的,因此逐渐增加了允许用户通过操作步入式开关来使用座椅的步入式功能的电动(功率)规格。
在电动步入式操作的情况下,当用户操作步入式开关时,座椅滑动马达和座椅调角器马达在座椅控制器的控制下操作,通过马达的操作,第二排座椅沿座椅导轨向前滑动,并且椅背自动向前旋转和折叠。
通常,步入式开关位于第二排座椅的椅背的上端,以便坐在第三排座椅中的乘客顺畅地操作步入式开关。
坐在第三排座椅上的乘客在第二排座椅的步入式操作完成之后或第二排座椅执行步入式操作时下车。在这种情况下,乘客在通过他/她的手握住第二排座椅的椅背的同时平稳地下车。在这个过程中,第三排座椅中的乘客经常会误操作步入式开关。
当第三排座椅中的乘客在下车时误操作步入式开关时,第二排座椅向座椅导轨的后侧移动并返回到初始位置,并且椅背再次直立。由于这个原因,第三排座椅中正在下车的乘客被卡在车门和通过座椅的返回操作正在返回的第二排座椅之间,导致乘客受伤。
作为背景进行说明的前述内容仅旨在帮助理解本发明的背景,并不意味着本发明落入本领域技术人员已知的相关技术的范围。
作为相关技术,存在KR 10-2013-0024625A。
发明内容
技术问题
本发明的目的是提供一种控制车辆座椅的步入式操作的方法,该方法在座椅的步入式操作或步入式返回操作期间在产生步入式开关的操作信号时确定步入式开关是否误操作,在误操作的情况下继续执行座椅的步入式操作或步入式返回操作,并且仅在根据用户意图的正常操作的情况下停止步入式操作或步入式返回操作,这样可以防止乘客因错误的步入式操作而受伤。
技术方案
为实现上述目的,本发明提供一种控制车辆座椅的步入式操作的方法,该方法包括:第一确定步骤,确定在车辆座椅的步入式操作期间是否产生步入式开关的信号;第二确定步骤,在第一确定步骤的确定结果表明产生了步入式开关的信号时,确定信号产生的次数;以及第三确定步骤,在第二确定步骤的确定结果表明产生了一次步入式开关的信号时,确定座椅向前滑动的位置和椅背的倾斜角度是否满足乘客的下车条件,其中在第三确定步骤的确定结果表明不满足乘客的下车条件时,在座椅控制器的控制下继续执行车辆座椅的步入式操作,并且完成步入式操作。
该方法可以进一步包括:第四确定步骤,在第三确定步骤的确定结果表明满足乘客的下车条件时,确定信号产生持续时间是否超过过滤时间,其中在第四确定步骤的确定结果表明信号产生持续时间超过过滤时间时,座椅控制器确定应用乘客的意图,并且座椅控制器执行控制以停止座椅的步入式操作。
当第四确定步骤中的确定结果表明信号产生持续时间未超过过滤时间时,可以在座椅控制器的控制下继续执行车辆座椅的步入式操作,并且可以完成步入式操作。
当第一确定步骤的确定结果表明没有产生步入式开关的信号时,可以在座椅控制器的控制下继续执行车辆座椅的步入式操作,并且可以完成步入式操作。
当第二确定步骤的确定结果表明产生了两次或更多次步入式开关的信号时,座椅控制器可以确定应用乘客的意图,并且座椅控制器可以执行控制以停止座椅的步入式操作。
该方法可以进一步包括:第五确定步骤,确定在完成步入式操作之后的步入式返回操作期间是否产生步入式开关的信号;第六确定步骤,在第五确定步骤的确定结果表明产生了步入式开关的信号时,确定信号产生的次数;以及第七确定步骤,在第六确定步骤中的确定结果表明产生了一次步入式开关的信号时,确定信号产生持续时间是否超过过滤时间,其中在第七确定步骤的确定结果表明信号产生持续时间超过过滤时间时,座椅控制器确定应用乘客的意图,并且座椅控制器执行控制以停止座椅的步入式操作。
当第七确定步骤中的确定结果表明信号产生持续时间未超过过滤时间时,可以在座椅控制器的控制下继续执行车辆座椅的步入式返回操作,并且可以完成步入式返回操作。
当第六确定步骤的确定结果表明产生了两次或更多次步入式开关的信号时,座椅控制器可以确定应用乘客的意图,并且座椅控制器可以执行控制以停止座椅的步入式返回操作。
进一步,本发明提供一种控制车辆座椅的步入式操作的方法,该方法包括:在座椅的步入式操作或步入式返回操作期间产生步入式开关的操作信号;并且考虑到步入式开关的信号的产生次数和信号过滤时间来确定步入式开关是否误操作,其中在确定结果表明步入式开关的信号为误操作时,在座椅控制器的控制下继续执行车辆座椅的步入式操作或步入式返回操作直到完成步入式操作或步入式返回操作,并且其中在确定结果表明步入式开关的信号是根据用户意图的正常操作时,通过座椅控制器的控制停止座椅的步入式操作或步入式返回操作。
当在座椅的步入式操作或步入式返回操作期间产生了一次步入式开关的信号并且已经产生了一次信号的步入式开关的信号产生持续时间未超过过滤时间时,座椅控制器可以确定乘客误操作步入式开关,并且座椅控制器可以执行控制以继续执行步入式操作或步入式返回操作直到完成步入式操作或步入式返回操作。
当在座椅的步入式操作或步入式返回操作期间产生了一次步入式开关的信号并且已经产生了一次信号的步入式开关的信号产生持续时间超过过滤时间时,座椅控制器可以确定应用乘客的停止步入式操作或步入式返回操作的意图,并且座椅控制器可以执行控制以停止步入式操作或步入式返回操作。
当在座椅的步入式操作或步入式返回操作期间在预定时间内产生了两次或更多次步入式开关的信号时,座椅控制器可以确定应用乘客的停止步入式操作或步入式返回操作的意图,并且座椅控制器可以执行控制以停止步入式操作或步入式返回操作。
有益效果
根据本发明的控制车辆座椅的步入式操作的方法,在座椅的步入式操作或步入式返回操作期间产生步入式开关的操作信号时,考虑到信号产生的次数和信号过滤时间来确定步入式开关是否误操作,在误操作的情况下继续执行步入式操作或步入式返回操作,并且仅在根据用户意图的正常操作的情况下停止步入式操作或步入式返回操作,这样可以防止乘客因错误的步入式操作而受伤。
附图说明
图1是用于说明根据本发明的控制车辆座椅的步入式操作的方法的示意性配置图。
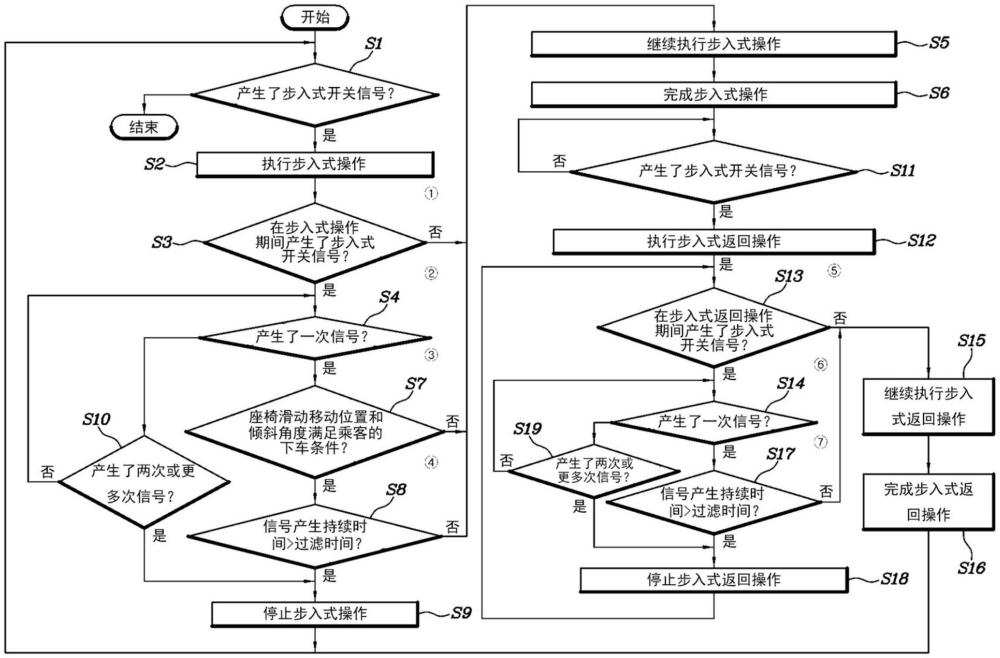
图2和图3是根据本发明的框图和流程图。
具体实施方式
仅出于说明根据本发明的实施例的目的举例说明在本说明书或本申请中所公开的本发明的实施例的具体结构或功能的描述,根据本发明的实施例可以以各种形式实施并且不应解释为本发明限于本说明书或本申请中描述的实施例。
由于根据本发明的实施例可以进行各种改变并且可以具有各种形式,因此将在附图中示出具体的实施例并且在本说明书或本申请中对其进行详细描述。然而,具体实施例的描述并非旨在将根据本发明的构思的实施例限制为具体实施例,而是应该理解为,本发明涵盖了落入本发明的精神和技术范围内的所有修改方案、等同方案和替换方案。
诸如“第一”和/或“第二”的术语可以用于描述各种构成元件,但这些构成元件不应受这些术语的限制。这些术语仅用于将一个构成元件与其他构成元件区分开来。例如,在不脱离根据本发明的构思的范围的情况下,第一构成元件可以称为第二构成元件,同样地,第二构成元件也可以称为第一构成元件。
当一个构成元件被描述为“联接”或“连接”到另一个构成元件时,应该理解为一个构成元件可以直接联接或连接到另一个构成元件,并且在两个构成元件之间也可以存在介于中间的构成元件。当一个构成元件被描述为“直接联接到”或“直接连接到”另一个构成元件时,应该理解为在构成元件之间不存在介于中间的构成元件。用于解释构成元件之间的关系的其他表达方式,即“在……之间”和“恰好在……之间”或“与……相邻”和“与……直接相邻”,应以类似的方式解释。
本说明书中使用的术语仅用于描述特定实施例,并不旨在限制本发明。除非在上下文中明确描述为不同的含义,否则单数表达包括复数表达。在本说明书中,应理解术语“包含”、“包含有”、“包括”、“包括有”、“含有”、“具有”、“有”或它们的其他变型是开放性的,因此指定存在所陈述的特征、数量、步骤、操作、元件、组件或其组合,但不排除存在或添加一个或多个其他特征、数字、步骤、操作、元件、组件或其组合。
除非另外定义,否则本文中使用的所有术语,包括技术或科学术语,具有与本发明所属领域的技术人员通常理解的含义相同的含义。除非在本说明书中明确定义,否则诸如在常用词典中定义的那些的术语应被解释为具有与相关技术的上下文中的含义一致的含义,并且不应被解释为过于理想或正式的含义。
根据本发明的示例性实施例的控制单元(控制器)可以由被配置为存储算法的非易失性存储器(未示出)和处理器(未示出)实施,该算法用于控制车辆中各种组成元件的操作或存储与用于执行算法的软件命令相关的数据,该处理器被配置为通过使用相应存储器中存储的数据来执行下面的操作。在这种情况下,存储器和处理器可以被实施为不同的芯片。可选地,存储器和处理器可以被实施为集成了存储器和处理器的单个芯片。处理器可以以一个或多个处理器的形式来配置。
在下文中,将参照附图描述根据本发明的示例性实施例的控制车辆座椅的步入式操作的方法。
如图1和图2所示,车辆的第二排座椅10包括座垫11和椅背12。座垫11联接到座椅导轨20并且沿着座椅导轨20向前或向后滑动。椅背12可以相对于座垫11向前或向后转动,以便可以调整椅背12的角度。
座椅导轨20包括固定导轨、可移动导轨、座椅滑动马达30和连接器,其中固定导轨联接到车身底板并沿前后方向延伸,可移动导轨被构造为沿着固定导轨移动,座椅滑动马达30被构造为产生用于移动可移动导轨的动力,连接器包括被构造为将滑动马达30的动力传递到可移动导轨的齿轮。可移动导轨连接到座垫11。
进一步,椅背12的角度可以通过调角器和座椅调角器马达40来调节,座椅调角器马达40被构造为产生用于操作调角器的动力。
座椅滑动马达30和座椅调角器马达40的操作均由座椅控制器50控制。设置在第二排座椅10的椅背12的上端的步入式开关70的信号被输入到座椅控制器50。
附图标记60表示第三排座椅。
因此,在乘客操作第二排座椅10的步入式开关70时,座椅滑动马达30和座椅调角器马达40在座椅控制器50的控制下操作,第二排座椅10通过马达30和40的操作沿着座椅导轨20向前滑动,并且椅背12向前转动和折叠,从而执行步入式操作。进一步,也可以执行与步入式操作相反的步入式返回操作。
将参照图3中的流程图描述根据本发明的控制车辆座椅的步入式操作的方法。
当随着第三排座椅60中的乘客为了下车而操作第二排座椅10的步入式开关70产生信号(步骤S1)时,座椅滑动马达30和座椅调角器马达40在座椅控制器50的控制下操作,第二排座椅10沿座椅导轨20滑动,并且椅背12向前转动和折叠,从而执行步入式操作(步骤S2)。
当第三排座椅60的乘客在第二排座椅10的步入式操作期间操作步入式开关70时,即使在这种情况下也产生信号,并且座椅控制器50确定是否产生步入式开关70的信号(第一确定步骤,步骤S3)。
当第一确定步骤(步骤S3)的确定结果表明产生了步入式开关70的信号时,座椅控制器50确定信号产生的次数(第二确定步骤,步骤S4)。
然而,当第一确定步骤(步骤S3)的确定结果表明没有产生步入式开关70的信号时,在座椅控制器50的控制下继续执行车辆座椅的步入式操作(步骤S5),然后最终完成步入式操作(步骤S6)。
当第二确定步骤(步骤S4)的确定结果表明产生了一次步入式开关的信号时,座椅控制器50确定座椅向前滑动的位置和椅背12的倾斜角度是否满足乘客的下车条件(第三确定步骤,步骤S7)。
在第三排座椅60中的乘客的最低下车条件的情况下,可以将第二排座椅10的向前滑动位置定义为第三排座椅60中的乘客可以下车的最小滑动位置。进一步,可以将第二排座椅10的椅背12的向前折叠角度定义为第三排座椅60中的乘客可以下车的最小转动角度。
座椅控制器50可以使用座椅滑动马达30和座椅调角器马达40的转速来确定第三排座椅60中的乘客的最低下车条件。可选地,座椅控制器50可以使用位置传感器、转动传感器、相机传感器等来确定第三排座椅60中的乘客的最低下车条件。
当第三确定步骤(步骤S7)的确定结果表明不满足乘客的下车条件时,在座椅控制器50的控制下继续执行车辆座椅的步入式操作,从而继续执行步入式操作(步骤S5),然后最终完成步入式操作(步骤S6)。
然而,当第三确定步骤(步骤S7)的确定结果表明满足乘客的下车条件时,座椅控制器50确定步入式开关70的信号产生持续时间是否超过过滤时间(第四确定步骤,步骤S8)。
可以将与步入式开关70的信号相关的过滤时间设定为大约5秒,但是该过滤时间可以根据需要改变。
当第四确定步骤(步骤S8)的确定结果表明信号产生持续时间超过过滤时间时,座椅控制器50确定应用乘客的停止步入式操作的意图,从而座椅控制器50执行控制以停止座椅的步入式操作,并且座椅的步入式操作立即停止(步骤S9)。
然而,当第四确定步骤(步骤S8)中的确定结果表明信号产生持续时间未超过过滤时间时,在座椅控制器50的控制下继续执行车辆座椅的步入式操作并且完成步入式操作(步骤S5和S6)。
也就是说,在步入式操作期间产生一次步入式开关70的信号且信号产生持续时间未超过过滤时间的情况下,座椅控制器50确定第三排座椅60中的乘客在下车时误操作了步入式开关70。在这种情况下,如果座椅的步入式操作突然停止,则第三排座椅60中正在下车的乘客可能与第二排座椅10发生碰撞并受伤。为了防止这种情况,继续执行步入式操作直到步入式操作完成。
进一步,在第二确定步骤(步骤S4)的确定结果表明在预定时间(例如,2至3秒)内产生两次或更多次步入式开关的信号(步骤S10)时,座椅控制器50确定应用乘客的停止步入式操作的意图,从而座椅控制器50执行控制以停止座椅的步入式操作,并且立即停止座椅的步入式操作(步骤S9)。
进一步,当在完成步入式操作(步骤S6)之后通过步入式开关70的操作产生信号(步骤S11)时,座椅滑动马达30和座椅调角器马达40在座椅控制器50的控制下操作,第二排座椅10在沿座椅导轨20向后滑动的同时返回到初始位置,已经向前转动和折叠的椅背12向后转动以恢复并直立,以便执行第二排座椅10的步入式返回操作(步骤S12)。
即使在第二排座椅10的步入式返回操作期间乘客操作步入式开关70时,也产生信号,并且座椅控制器50确定是否产生步入式开关70的信号(第五确定步骤,步骤S13)。
当第五确定步骤(步骤S13)的确定结果表明产生了步入式开关70的信号时,座椅控制器50确定信号产生的次数(第六确定步骤,步骤S14)。
然而,当第五确定步骤(步骤S13)的确定结果表明没有产生步入式开关70的信号时,在座椅控制器50的控制下继续执行车辆座椅的步入式返回操作(步骤S15),然后最终完成步入式返回操作(步骤S16)。
当第六确定步骤(步骤S14)的确定结果表明产生了一次步入式开关的信号时,座椅控制器50确定步入式开关70的信号产生持续时间是否超过过滤时间(第七确定步骤,步骤S17)。
即使在这种情况下,也可以将与步入式开关70的信号相关的过滤时间设定为大约5秒,但是该过滤时间可以根据需要改变。
当第七确定步骤(步骤S17)的确定结果表明信号产生持续时间超过过滤时间时,座椅控制器50确定应用乘客的停止步入式操作的意图,从而座椅控制器50执行控制以停止座椅的步入式操作,并且立即停止座椅的步入式操作(步骤S18)。
然而,当第七确定步骤(步骤S17)中的确定结果表明信号产生持续时间未超过过滤时间时,在座椅控制器50的控制下继续执行车辆座椅的步入式返回操作,并且完成步入式返回操作(步骤S15和S16)。
也就是说,在步入式返回操作期间产生一次步入式开关70的信号且信号产生持续时间未超过过滤时间的情况下,座椅控制器50确定乘客误操作了步入式开关70。在这种情况下,如果座椅的步入式返回操作突然停止,则第三排座椅60中正在上或下车的乘客可能与第二排座椅10发生碰撞并受伤。为了防止这种情况,继续执行步入式返回操作直到完成步入式返回操作。
进一步,在第六确定步骤(步骤S14)的确定结果表明在预定时间(例如,2至3秒)内产生两次或更多次步入式开关的信号(步骤S19)时,座椅控制器50确定应用乘客的停止步入式返回操作的意图,从而座椅控制器50执行控制以停止座椅的步入式返回操作,并且座椅的步入式返回操作立即停止(步骤S18)。
如上所述,根据本发明的控制车辆座椅的步入式操作的方法在座椅的步入式操作或步入式返回操作期间产生步入式开关70的操作信号时,考虑到信号产生的次数和信号过滤时间来确定步入式开关70是否误操作,在误操作的情况下继续执行步入式操作或步入式返回操作,并且仅在根据用户意图的正常操作的情况下停止步入式操作或步入式返回操作,这样可以防止乘客因错误的步入式操作而受伤。
尽管已示出和描述了本发明的特定实施例,但是对于本领域普通技术人员将显而易见的是,在不脱离所附权利要求书限定的本发明的技术精神的情况下,可以对本发明进行各种修改和改变。
附图标记说明
10:第二排座椅
11:座垫
12:椅背
20:座椅导轨
30:滑动马达
40:座椅调角器马达
50:座椅控制器
60:第三排座椅
70:步入式开关
- 车辆座椅远程控制系统以及车辆座椅远程控制方法
- 基于动态确定后排座椅占用状态来控制车辆中音频扬声器设置的方法及提供这种控制的车辆
- 车辆座椅的薄泡沫垫的制造方法和车辆座椅的薄泡沫垫
- 车辆控制系统、车辆外置式电子控制单元、车辆控制方法及记录介质
- 用于车辆座椅的用于约束处于放松位置的乘客的装置及其操作控制方法
- 一种车辆、磁流变液式车辆减振座椅控制装置及其方法