调整激光脉冲以补偿干扰物体
文献发布时间:2024-01-17 01:23:17
技术领域
本公开总体上涉及眼科手术系统和方法,更具体地涉及调整激光脉冲以补偿干扰物体。
背景技术
激光消融通过用激光束对物质进行照射来将物质从表面移除。在眼科手术中,消融手术通常使用准分子激光器来重塑角膜,以改变角膜的屈光特性。在该手术过程中,根据消融轮廓将激光束引向角膜,该消融轮廓指示在角膜的特定位置处要移除的组织体积。光束迫使分子彼此分离,并且物质被移除,以形成期望的角膜形状。
可以根据焦斑图案将激光束聚焦,焦斑图案是根据消融轮廓确定的。给定每次脉冲所消融的组织体积,根据要根据消融轮廓移除的组织体积可以计算出要被引导到特定位置的脉冲次数。为了准确地形成期望的角膜形状,焦斑图案所限定的脉冲次数应到达组织。然而,在某些情形下,脉冲可能会被干扰物体阻挡。
发明内容
在某些实施例中,一种用于对眼睛进行外科手术的眼科手术系统包括激光装置、相机和计算机。该激光装置包括激光源和扫描器。该激光源生成包括脉冲的激光束,并且该扫描器根据激光焦斑图案将这些脉冲引向该眼睛的组织。该相机捕获该眼睛的手术图像。该计算机指示该激光装置根据该激光焦斑图案将这些脉冲引向该眼睛、获取并监测该眼睛的手术图像、根据该眼睛的手术图像识别干扰物体、并且修改对这些脉冲的控制以补偿该干扰物体。
实施例可以不包括以下特征或者可以包括以下特征中的一个、部分或全部:该计算机通过以下项来根据该眼睛的手术图像识别该干扰物体:获取一个或多个可能干扰物体的描述,每个描述包括与可能干扰物体相对应的几何形状;在该眼睛的至少一个手术图像中检测出几何形状;以及将与检测出的几何形状相对应的该可能干扰物体识别为该干扰物体。该计算机通过以下项来根据该眼睛的手术图像识别该干扰物体:获取一个或多个可能干扰物体的描述,每个描述包括与可能干扰物体相对应的代表性图像;在该眼睛的至少一个手术图像中检测出与代表性图像相匹配的物体;以及将与检测出的物体相对应的该可能干扰物体识别为该干扰物体。该计算机通过以下项来根据该眼睛的手术图像识别该干扰物体:获取该眼睛的治疗前图像;将该眼睛的治疗前图像与该眼睛的至少一个手术图像进行比较以确定出该治疗前图像与该手术图像之间的差异;以及将该差异识别为该干扰物体。该手术图像指示该图像的物体的温度。该计算机通过以下项来根据该眼睛的手术图像识别该干扰物体:检测出该图像中温度与该眼睛的组织的温度有所偏离的物体;以及将检测出的物体识别为该干扰物体。该手术图像指示该图像的物体距该相机的距离。该计算机通过以下项来根据该眼睛的手术图像识别该干扰物体:检测出该图像中距离与该眼睛的距离有所偏离的物体;以及将检测出的物体识别为该干扰物体。该计算机通过以下项来修改对这些脉冲的控制以补偿该干扰物体:确定被该干扰物体阻挡的脉冲;以及暂停发射被该干扰物体阻挡的脉冲。该计算机在以下情况下可以发射暂停的脉冲:当该干扰物体不再阻挡这些脉冲、当该干扰物体不再阻挡这些脉冲而在该外科手术接近尾声时、响应于检测出该干扰物体不再阻挡这些脉冲、和/或当预测的路径指示该干扰物体不再阻挡至少一个脉冲时。该计算机可以生成该干扰物体正在阻挡这些脉冲的通知。该干扰物体包括以下中的至少一个:手术器械、医学实验室工具、该眼科手术系统的一部分、用户身体的一部分、患者身体的一部分、活的生物、或手术产品。
在某些实施例中,一种用于对眼睛进行外科手术的方法包括:由激光装置的激光源生成包括脉冲的激光束;由激光装置的扫描器根据激光焦斑图案将这些脉冲引向该眼睛的组织;由相机捕获该眼睛的手术图像;由计算机指示该激光装置根据该激光焦斑图案将这些脉冲引向该眼睛;由该计算机获取并监测该眼睛的手术图像;由该计算机根据该眼睛的手术图像识别干扰物体;以及由该计算机修改对这些脉冲的控制以补偿该干扰物体。
实施例可以不包括以下特征或者可以包括以下特征中的一个、部分或全部:根据该眼睛的手术图像识别该干扰物体包括:获取一个或多个可能干扰物体的描述,每个描述包括与可能干扰物体相对应的几何形状;在该眼睛的至少一个手术图像中检测出几何形状;以及将与检测出的几何形状相对应的该可能干扰物体识别为该干扰物体。根据该眼睛的手术图像识别该干扰物体包括:获取一个或多个可能干扰物体的描述,每个描述包括与可能干扰物体相对应的代表性图像;在该眼睛的至少一个手术图像中检测出与代表性图像相匹配的物体;以及将与检测出的物体相对应的该可能干扰物体识别为该干扰物体。根据该眼睛的手术图像识别该干扰物体包括:获取该眼睛的治疗前图像;将该眼睛的治疗前图像与该眼睛的至少一个手术图像进行比较以确定出该治疗前图像与该手术图像之间的差异;以及将该差异识别为该干扰物体。该手术图像指示该图像的物体的温度。根据该眼睛的手术图像识别该干扰物体包括:检测出该图像中温度与该眼睛的组织的温度有所偏离的物体;以及将检测出的物体识别为该干扰物体。该手术图像指示该图像的物体距该相机的距离。根据该眼睛的手术图像识别该干扰物体包括:检测出该图像中距离与该眼睛的距离有所偏离的物体;以及将检测出的物体识别为该干扰物体。修改对这些脉冲的控制以补偿该干扰物体包括:确定被该干扰物体阻挡的脉冲;以及暂停发射被该干扰物体阻挡的脉冲。
在某些实施例中,一种用于对眼睛进行外科手术的眼科手术系统包括激光装置、相机和计算机。该激光装置包括激光源和扫描器。该激光源生成包括脉冲的激光束,并且该扫描器根据激光焦斑图案将这些脉冲引向该眼睛的组织。该相机捕获该眼睛的手术图像。该计算机指示该激光装置根据该激光焦斑图案将这些脉冲引向该眼睛,并且获取并监测该眼睛的手术图像。该计算机通过进行以下项中的至少一项来根据该眼睛的手术图像识别该干扰物体:获取一个或多个可能干扰物体的描述,每个描述包括与可能干扰物体相对应的几何形状,在该眼睛的至少一个手术图像中检测出几何形状,以及将与检测出的几何形状相对应的该可能干扰物体识别为该干扰物体;获取一个或多个可能干扰物体的描述,每个描述包括与可能干扰物体相对应的代表性图像,在该眼睛的至少一个手术图像中检测出与代表性图像相匹配的物体,以及将与检测出的物体相对应的该可能干扰物体识别为该干扰物体;获取该眼睛的治疗前图像,将该眼睛的治疗前图像与该眼睛的至少一个手术图像进行比较以确定出该治疗前图像与该手术图像之间的差异,以及将该差异识别为该干扰物体;如果该手术图像指示该图像的物体的温度,那么通过以下来识别该干扰物体:检测出该图像中温度与该眼睛的组织的温度有所偏离的物体、以及将检测出的物体识别为该干扰物体;如果该手术图像指示该图像的物体距该相机的距离,那么通过以下来识别该干扰物体:检测出该图像中距离与该眼睛的距离有所偏离的物体、以及将检测出的物体识别为该干扰物体。该计算机通过以下项来修改对这些脉冲的控制以补偿该干扰物体:预测该干扰物体的路径;确定被该干扰物体阻挡的脉冲;生成该干扰物体正在阻挡这些脉冲的通知;暂停发射被该干扰物体阻挡的脉冲;以及在以下情况下发射暂停的脉冲:当该干扰物体不再阻挡这些脉冲、当该干扰物体不再阻挡这些脉冲而在该外科手术接近尾声时、响应于检测出该干扰物体不再阻挡这些脉冲、或者当预测的路径指示该干扰物体不再阻挡至少一个脉冲时。该干扰物体包括以下中的至少一个:手术器械、医学实验室工具、该眼科手术系统的一部分、用户身体的一部分、患者身体的一部分、活的生物、或手术产品。
附图说明
图1和图2展示了根据某些实施例的眼科激光消融系统的示例,该眼科激光消融系统消融患者的眼睛的角膜组织以进行外科手术;
图3展示了可能干扰物体的示例及其对应的描述的表;
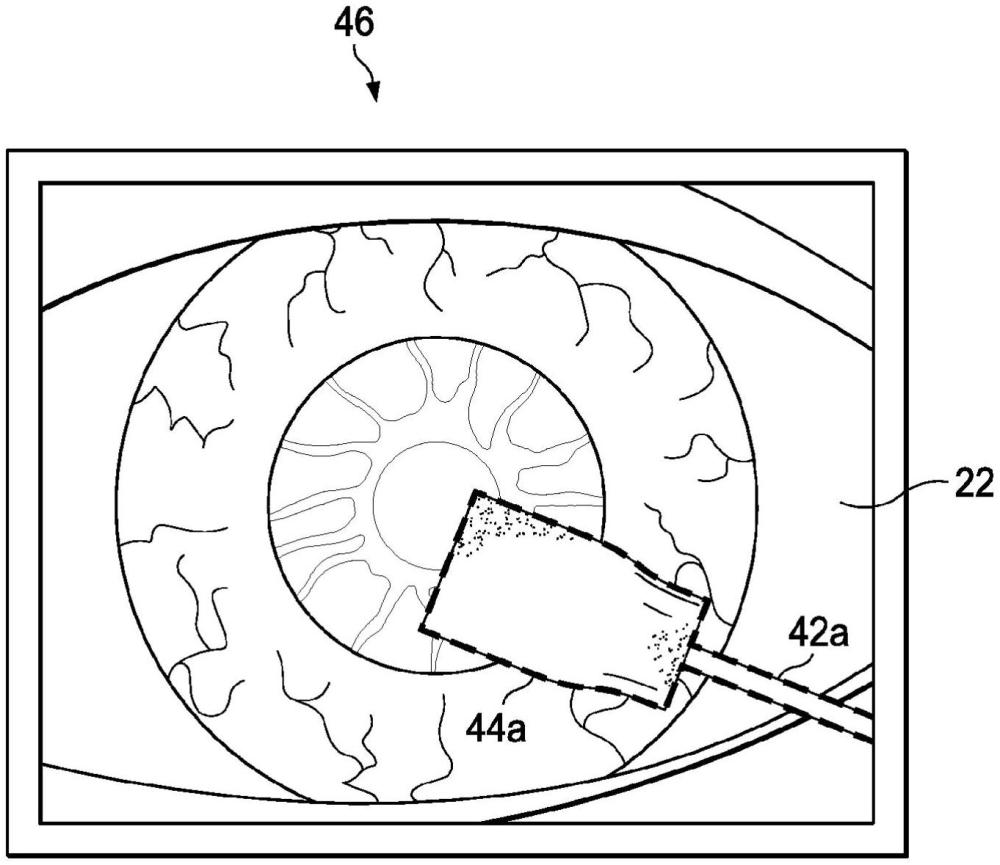
图4展示了眼睛的手术图像和干扰物体的示例;
图5展示了眼睛的手术图像与治疗前图像的比较以识别出干扰物体的示例;
图6展示了手术图像用于使用物体的温度来识别出干扰物体的示例;
图7展示了手术图像用于使用物体的距离来识别出干扰物体的示例;以及
图8展示了根据某些实施例的用于在外科手术中识别并补偿干扰物体的方法的示例,该方法可以由图1的系统来进行。
具体实施方式
现在参考说明书和附图,详细示出了所公开的设备、系统和方法的示例实施例。说明书和附图不旨在穷举或以其他方式将权利要求限制于附图中所示和说明书中所公开的具体实施例。尽管附图表示可能的实施例,但附图不一定是按比例绘制的,并且某些特征可以被简化、夸大、移除或部分剖切以更好地图示实施例。
在某些实施例中,系统和方法可以在外科手术过程中识别出阻挡被引向眼睛的激光脉冲的干扰物体。可以通过例如以下项来识别干扰物体:检测出与干扰物体相对应的几何形状;检测出与干扰物体的代表性图像相匹配的物体;检测出治疗前图像中不存在的物体;检测出温度与眼睛的温度有所偏离的物体;和/或检测出在激光装置与眼睛之间的距离处的物体。系统和方法还可以修改对脉冲的控制以补偿干扰物体。例如,可以通过以下项来修改控制:在干扰物体不再阻挡脉冲之后发射脉冲;在手术接近尾声时发射脉冲;和/或发送干扰物体正在阻挡脉冲的通知。
图1和图2展示了根据某些实施例的眼科激光消融系统10的示例,该眼科激光消融系统消融患者的眼睛的角膜组织以进行外科手术。系统10可以用于不同类型的手术。例如,激光原位角膜磨镶术(LASIK)涉及切开角膜的角膜瓣,然后使用系统10来消融角膜。作为另一个示例,在屈光性角膜切削术(PRK),例如化学地或机械地移除上皮,然后使用系统10来消融角膜。
图1示出了眼科激光消融系统10和躺在床8上的患者6。在所展示的示例中,系统10包括相机38和激光束离开系统10的部分39。干扰物体阻挡激光脉冲到达患者6,并且可以位于部分39与患者6之间、例如在区域41中。干扰物体的示例包括手术器械、医学实验室工具(例如,试管、移液管、插管)、系统10的一部分、医务人员身体的一部分(例如,手指、手套)、活的生物(例如,飞虫)、患者身体的一部分(例如,睫毛)、手术产品(例如,水滴、消融雾)、或其他可以阻挡激光脉冲到达患者6的合适物体。
在图2中,系统10包括如图所示耦合的激光装置15、相机38和控制计算机30。激光装置15包括如图所示耦合的可控部件,比如激光源12、扫描器16、一个或多个光学元件17和/或聚焦物镜18。计算机30包括如图所示耦合的逻辑36、存储器32(其存储计算机程序34)和显示器37。为了便于解释,使用以下xyz坐标系:z方向由激光束的传播方向限定,并且xy平面与传播方向正交。可以使用其他合适的xyz坐标系。
转向系统10的部分,激光源12生成激光束,该激光束根据激光焦斑图案修改(例如,消融或光破坏)眼睛22的组织。激光源12可以是生成具有多个激光脉冲的激光束的准分子激光器或飞秒激光器。焦斑图案可以限定激光辐射脉冲要被引导到的位置的x和y(以及也许z)坐标。在某些情况下,焦斑图案可以根据消融轮廓来确定,该消融轮廓指示在角膜的特定x、y位置处要移除的组织体积。给定每次脉冲所消融的组织体积,根据消融轮廓所限定的组织体积可以计算出要被引导到x、y位置的脉冲次数。
扫描器16根据激光焦斑图案横向地和/或纵向地引导激光束的焦点。横向方向是指与光束传播方向正交的方向,即,x方向、y方向。扫描器16可以以任何合适的方式横向地引导激光束。例如,扫描器16可以包括可以关于相互垂直的轴线倾斜的一对电流计致动扫描器镜子。作为另一个示例,扫描器16可以包括可以电光地操纵激光束的电光晶体。
纵向方向是指平行于激光束传播的方向,即,z方向。扫描器16可以以任何合适的方式纵向地引导激光束。例如,扫描器16可以包括纵向可调整透镜、可变屈光力的透镜、或可以控制光束聚焦的z位置的可变形镜子。扫描器16的部件可以沿光束路径以任何合适的方式布置,例如,在相同或不同的模块单元中。
一个(或多个)光学元件17将激光束引向聚焦物镜18。光学元件17可以作用于(例如,透射、反射、折射、衍射、准直、调节、整形、聚焦、调制和/或以其他方式作用于)激光束。光学元件的示例包括透镜、棱镜、镜子、衍射光学元件(DOE)、全息光学元件(HOE)和空间光调制器(SLM)。在示例中,光学元件17是镜子。聚焦物镜18将激光束的焦点朝向眼睛22的点聚焦。在示例中,聚焦物镜18是物镜,例如,f-θ物镜。
相机38记录在外科手术过程中拍摄的眼睛22的手术图像。相机38的示例包括摄像机、干涉测量相机、热成像相机、超声相机、光学相干断层扫描相机、和眼睛跟踪相机。相机38将表示眼睛22的记录图像的图像数据传送到计算机30。
计算机30根据计算机程序34控制系统10的部件。例如,计算机30控制部件(例如,激光源12、扫描器16、光学元件17、和/或聚焦物镜18)以将激光装置15的激光束聚焦于眼睛22并且根据激光焦斑图案消融眼睛22的至少一部分。存储器32存储计算机30所使用的信息。例如,存储器32可以存储眼睛22的图像(例如,手术图像和/或治疗前图像)、干扰物体42的描述(例如,物体的代表性图像和/或几何形状)、和/或其他合适的信息,并且计算机30可以从存储器32获取信息。
计算机30可以监测手术图像并且识别阻挡被引向眼睛的激光脉冲的干扰物体。计算机30可以对图像数据进行图像处理以识别干扰物体。在某些实施例中,可以使用图像处理根据可能干扰物体的存储的描述(例如,可能干扰物体的几何形状和/或代表性图像)来识别干扰物体,如参考图3和图4更详细描述的。在其他实施例中,可以使用图像处理将治疗前图像与手术图像进行比较以检测出治疗前图像中不存在的物体,该物体指示干扰物体,如参考图5更详细描述的。在其他实施例中,可以使用图像处理来检测出温度与眼睛的温度有所偏离的物体,该物体指示干扰物体,如参考图6更详细描述的。在其他实施例中,可以使用图像处理来检测出在激光装置与眼睛之间的距离处的物体,该物体指示干扰物体,如参考图7更详细描述的。
计算机30可以识别被干扰物体阻挡的脉冲,并且修改对被阻挡脉冲的控制以补偿干扰物体。在某些实施例中,计算机30可以通过以下来识别被阻挡脉冲:根据手术图像确定干扰物体的位置、以及根据焦斑图案识别哪些脉冲被引导至该位置。
在某些实施例中,计算机30可以通过以下来修改对被阻挡脉冲的控制:暂停发射被阻挡脉冲、然后解决被阻挡脉冲的问题。在某些实施例中,计算机30可以进行以下项中的一项或多项来解决问题:(1)根据图像,检测出干扰物体不再位于阻挡至少一些脉冲的位置处,并且发射不再被阻挡的脉冲。(2)在手术接近尾声时(例如,在已经发射了激光焦斑图案的其他脉冲之后)发射这些脉冲。(3)发送干扰物体正在阻挡脉冲的通知。作为响应,用户可以移动干扰物体而不再阻挡脉冲。(4)根据例如像干扰物体一样的其他物体的先前路径和/或关于这些其他物体的移动的信息预测干扰物体的路径。然后,在预测的路径指示脉冲不再被阻挡时发射这些脉冲。
图3展示了可能干扰物体42的示例(42a-42h)及其对应的描述的表40。描述可以包括物体42的例如代表性图像43(43a-43h)和/或几何形状44(44a-44h),并且可以二维或三维描述物体42。存储器32可以存储表40。代表性图像43可以被存储为可能干扰物体42的照片的图像数据,并且几何形状44可以被存储为描述可能干扰物体42的属性(例如,矢量)的列表。计算机30可以从存储器32获取表40,以根据干扰物体42的对应的代表性图像43和/或几何形状44在手术图像中识别出这些干扰物体。干扰物体42的示例(42a-42h)包括:手术海绵42a-b、LASIK角膜瓣剥离器42c、paton 42d、曲棍球棒形刀(hockey knife)42e、lindstrom 42f、LASIK提取器42g、LASIK角膜瓣镊42h。
图4展示了眼睛22的手术图像46和干扰物体42a的示例。在某些实施例中,计算机30对手术图像26进行图像处理以识别出图像的几何形状44a。例如,对手术图像26进行分析以检测出颜色和/或亮度与眼睛的颜色和/或亮度有所偏离的区域的边界,并且确定边界是否与表40的几何形状44相匹配。如果相匹配,那么计算机30可以确定已经识别出干扰物体42a。在该示例中,计算机识别出干扰物体42a。
在某些实施例中,计算机30对手术图像26进行图像处理以识别出与代表性图像43相匹配的物体。例如,将手术图像26的至少一些像素与代表性图像43的至少一些像素进行比较,以查看手术图像26是否与代表性图像43基本上相匹配。如果相匹配,那么计算机30可以确定已经识别出干扰物体42a。在该示例中,计算机识别出干扰物体42a。
图5展示了眼睛22的手术图像46与治疗前图像48的比较以识别出干扰物体42a的示例。在该示例中,计算机30(从例如存储器32)获取图像46、48,并且进行图像处理来比较图像46、48以识别出图像46、48之间的差异。例如,将图像46、48的对应的像素进行比较,并记录差异。超出预定公差的差异对应于干扰物体42a。预定公差可以被设定成将干扰物体与其他差异(例如,图像伪影、或眼睛22在不同图像之间的差异)区分开来,并且可以具有在以下范围中的一个或多个范围内的值:2至5、5至10、10至20、和/或大于20%。在该示例中,计算机30将差异识别为干扰物体42a。
图6展示了手术图像46用于使用图像46中物体的温度来识别出干扰物体42a的示例。在该示例中,手术图像46是由热成像相机(例如,红外相机)生成的热图像,该热图像指示图像46中物体的表面温度。图像46以一种颜色50显示出温度较高的眼睛22并且以另一种颜色52显示出温度较低的干扰物体42a。计算机30将颜色52的区域识别为干扰物体42a。
图7展示了手术图像46用于使用图像46中物体的距离来识别出干扰物体42a的示例。在该示例中,系统10包括相机,例如干涉测量相机、OCT相机、超声相机、或生成指示距相机的距离的手术图像的其他相机。在该示例中,相机所拍摄的图像可以包括距离测量结果,例如基于位置的深度扫描,其幅度峰值指示物体的位置。在某些实施例中,激光束离开系统10的部分39与眼睛22之间的距离是已知的,并且部分39与眼睛22之间的距离指示干扰物体42。在该示例中,计算机30将部分39与眼睛22之间的物体识别为干扰物体42a。
图8展示了根据某些实施例的用于在外科手术中识别并补偿干扰物体的方法的示例,该方法可以由图1的系统10来进行。在实施例中,计算机30可以指示系统10的部件进行某些步骤。该方法开始于步骤110,在该步骤,计算机30获取激光焦斑图案,该激光焦斑图案指示用于外科手术的激光脉冲的放置。在步骤112,计算机30监测来自相机38的眼睛22的图像。
在步骤114,计算机30识别干扰物体42。可以以任何合适的方式(例如,如步骤114a-d中所描述的)识别干扰物体42。在步骤114a,计算机30根据可能干扰物体的存储的描述(例如,可能干扰物体的几何形状和/或代表性图像)识别干扰物体。在步骤114b,计算机30将治疗前图像与手术图像进行比较以检测出治疗前图像中不存在的物体,该物体指示干扰物体。在步骤114c,计算机30检测出温度与眼睛的温度有所偏离的物体,该物体指示干扰物体。在步骤114c,计算机30检测出在激光装置与眼睛之间的距离处的物体,该物体指示干扰物体。
在步骤116,计算机30暂停发射被干扰物体阻挡的脉冲。计算机30可以进行一个或多个附加的步骤118a-b来解决被阻挡脉冲的问题。在步骤118a,当干扰物体不再阻挡脉冲时,计算机30发射暂停的脉冲。例如,当干扰物体不再阻挡脉冲时,计算机30可以在外科手术接近尾声时发射暂停的脉冲。作为另一个示例,计算机30可以检测出干扰物体不再阻挡脉冲,并且响应于该检测而发射暂停的脉冲。作为又一个示例,计算机30可以根据物体的预测的路径确定干扰物体不再阻挡脉冲,并且响应于该确定而发射暂停的脉冲。在步骤118b,计算机30生成干扰物体正在阻挡脉冲的通知。作为响应,用户可以移动干扰物体。
在步骤126,手术可能结束。如果手术没有结束,那么该方法返回至步骤112,在该步骤,计算机30监测眼睛22的图像。如果手术结束,那么该方法结束。
本文公开的系统和设备的部件(比如控制计算机)可以包括接口、逻辑和/或存储器,其中任何一个可以包括计算机硬件和/或软件。接口可以接收至部件的输入和/或从部件发送输出,并且通常用于在例如软件、硬件、外围装置、用户以及这些的组合之间交换信息。用户接口(例如,图形用户接口(GUI))是用户可以用来与计算机交互的接口类型。用户接口的示例包括显示器、触摸屏、键盘、鼠标、手势传感器、麦克风和扬声器。
逻辑可以执行部件的操作。逻辑可以包括处理数据(例如,执行用于从输入生成输出的指令)的一个或多个电子装置。这种电子装置的示例包括计算机、处理器、微处理器(例如,中央处理单元(CPU))和计算机芯片。逻辑可以包括对能够由电子装置执行以执行操作的指令进行编码的计算机软件。计算机软件的示例包括计算机程序、应用和操作系统。
存储器可以存储信息,并且可以包括有形的、计算机可读的和/或计算机可执行的存储介质。存储器的示例包括计算机存储器(例如,随机存取存储器(RAM)或只读存储器(ROM))、大容量存储介质(例如,硬盘)、可移除存储介质(例如,光盘(CD)或数字视频或通用盘(DVD))、数据库、网络存储装置(例如,服务器)和/或其他计算机可读介质。特定实施例可以针对用计算机软件编码的存储器。
尽管本公开已经根据某些实施例进行了描述,但对本领域技术人员而言,实施例的修改(比如变更、替换、添加、省略和/或其他修改)将是显而易见的。因此,可以在不脱离本发明范围的情况下对实施例进行修改。例如,可以对本文公开的系统和设备进行修改。系统和设备的部件可以是一体式的或分开的,或者系统和设备的操作可以由更多、更少或其他部件来执行,这对于本领域技术人员来说是显而易见的。作为另一示例,可以对本文公开的方法进行修改。这些方法可以包括更多、更少或其他步骤,并且这些步骤可以以任何合适的顺序执行,这对于本领域技术人员来说是显而易见的。
为了帮助专利局和读者解释权利要求,申请人注意到,他们不旨在让任何权利要求或权利要求要素援引35U.S.C.§112(f),除非在特定权利要求中明确使用词语“用于……的装置”或“用于……的步骤”。申请人理解,在权利要求内使用任何其他术语(例如,“机构”、“模块”、“装置”、“单元”、“部件”、“元件”、“构件”、“设备”、“机器”、“系统”、“处理器”或“控制器”)是指相关领域技术人员已知的结构,并且不旨在援引35U.S.C.§112(f)。
- 一种用于飞秒激光脉冲放大系统中脉冲前沿畸变的补偿装置和补偿方法
- 一种用于飞秒激光脉冲放大系统中脉冲前沿畸变的补偿装置和补偿方法