一种提升机器鱼加速性能及转弯性能的仿生背鳍
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及仿生技术领域,尤其涉及一种提升机器鱼加速性能及转弯性能的仿生背鳍。
背景技术
在自然界中,鱼类在水下具有着无与伦比的运动能力。一直以来,人们希望能够模仿真实鱼类的运动机制,来研制一款能够兼顾性能和效率的水下机器鱼。现有的一些研究表明,真实鱼类背鳍展开时提升了其机动性及加速性能。借鉴仿生原理提升机器鱼的运动性能和效率,一直以来都是仿生机器鱼领域的研究热点,上述原理也将会得到广泛的应用。
发明内容
有鉴于此,本发明的目的在于提出一种提升机器鱼加速性能及转弯性能的仿生背鳍,能够保证机器鱼在不同的运动阶段均具有最佳的运动性能。
根据本发明的一个方面,提供一种提升机器鱼加速性能及转弯性能的仿生背鳍,包括:
机器鱼端盖,该端盖后侧设置由一腔体;
若干鳍骨,若干鳍骨通过连接杆串联,并可转动地连接于腔体内部,通过磁性联轴器联动;
驱动舵机,该驱动舵机与磁性联轴器连接,用于驱动磁性联轴器带动若干鳍骨转动。
在上述技术方案中,当机器鱼执行加速或转弯运动时,通过舵机控制展开背鳍,提升其加速及转弯性能,在未显著增加其能耗的同时,大大提升其运动性能,达到了兼顾运动性能和效率的研究目的。
在一些实施例中,所述仿生背鳍包括从前至后依次设置在腔体的第一鳍骨、第二鳍骨、第三鳍骨以及第四鳍骨;其中该第一鳍骨通过磁性联轴器可转动地连接于腔体,第二鳍骨、第三鳍骨以及第四鳍骨通过磁铁可转动地连接于腔体。
在上述技术方案中,选择磁铁以及磁性联轴器进行连接和驱动,既能够保证稳定性,又有利于机器鱼整体的密封性。磁性联轴器既满足所需运动要求,也能够满足机器鱼的防水要求。
在一些实施例中,所述第一鳍骨、所述第二鳍骨、所述第三鳍骨以及所述第四鳍骨通过连接杆串联,且两两鳍骨之间距离相同。
在上述技术方案中,这样设置的目的在于:能够保证鳍骨和连接杆间顺利形成四杆机构,将主动鳍骨的运动传向从动鳍骨,其中部分从动鳍骨作为虚约束存在。鳍骨、连接杆以及机器鱼体端盖之间构成了一连杆机构,第一鳍骨作为主动摇杆,第四鳍骨作为被动摇杆,中间两根鳍骨作为虚约束,保证背鳍外观的仿生性以及完整性。
在一些实施例中,所述磁性联轴器链接有第一锥齿轮,该第一锥齿轮啮合连接有第二锥齿轮,该第二锥齿轮于驱动舵机地输出轴相连。
在上述技术方案中,锥齿轮为一对,分别固连于从动锥齿轮和主动鳍骨根部,保证连接的同时,保证将旋转运动传递到主动鳍骨上。
在一些实施例中,所述第一鳍骨、第二鳍骨、第三鳍骨以及第四鳍骨远离腔体一端削尖。
在上述技术方案中,真实鱼类背鳍展开时提升了其机动性及加速性能,因此每根鳍骨高度不同,仿照真实鱼类的背鳍轮廓及真实鳍骨长度进行设计。顶部削尖的目的在于保证背鳍折叠完成后,鳍骨能够完全容纳到鳍槽当中,保证背部外形的连续性。
在一些实施例中,若干所述鱼鳍表面浇注有硅胶软薄膜。
在上述技术方案中,鳍骨中,为保证背鳍展开后的连续性,鳍骨上应浇注一层硅胶软薄膜,薄膜形状仿照真实金枪鱼背鳍外形。
在一些实施例中,所述驱动舵机于上位控制机通讯连接,控制背鳍收回状态时鳍骨中线与水平夹角约为25度,展开时该角度变化为90度。
在上述技术方案中,这样设置的目的在于:有助于机器鱼在水底时能够良好的展开背鳍。
根据本发明的另一个方面,提供一种机器鱼,包含上述的一种提升机器鱼加速性能及转弯性能的仿生背鳍。
在上述技术方案中,当机器鱼执行加速或转弯运动时,通过舵机控制展开背鳍,提升其加速及转弯性能,在未显著增加其能耗的同时,大大提升其运动性能,达到了兼顾运动性能和效率的研究目的。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
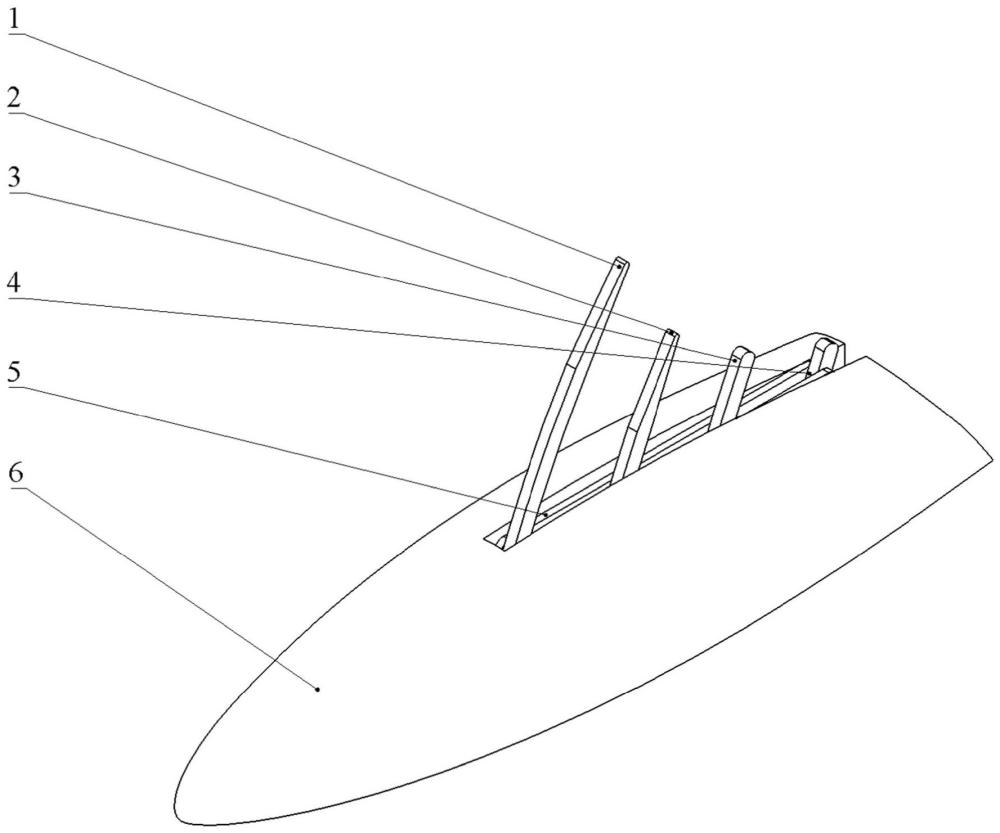
图1是本发明一种提升机器鱼加速性能及转弯性能的仿生背鳍实施例之一的仿生背鳍展开时的斜二测视图;
图2是本发明一种提升机器鱼加速性能及转弯性能的仿生背鳍实施例之一的前侧剖视图;
图3是本发明一种提升机器鱼加速性能及转弯性能的仿生背鳍实施例之一的后侧剖视图;
图4是本发明一种提升机器鱼加速性能及转弯性能的仿生背鳍实施例之一的鳍骨回收后的后侧剖视图;
图5是本发明一种提升机器鱼加速性能及转弯性能的仿生背鳍实施例之一的鳍骨外部浇注软硅胶膜形状示意图。
具体实施方式
下面结合附图和实施例,对本发明作进一步的详细描述。特别指出的是,以下实施例仅用于说明本发明,但不对本发明的范围进行限定。同样的,以下实施例仅为本发明的部分实施例而非全部实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
本发明提供一种提升机器鱼加速性能及转弯性能的仿生背鳍,能够保证机器鱼在不同的运动阶段均具有最佳的运动性能。
实施例之一
请参见图1至图5,一种提升机器鱼加速性能及转弯性能的仿生背鳍,包括:机器鱼端盖6,该端盖后侧设置由一腔体;若干鳍骨,若干鳍骨通过连接杆5串联,并可转动地连接于腔体内部,通过磁性联轴器11联动;驱动舵机7,该驱动舵机7与磁性联轴器11连接,用于驱动磁性联轴器11带动若干鳍骨转动。当机器鱼执行加速或转弯运动时,通过舵机控制展开背鳍,提升其加速及转弯性能,在未显著增加其能耗的同时,大大提升其运动性能,达到了兼顾运动性能和效率的研究目的。
在本实施例中,包括机器鱼体端盖6、第一鳍骨1、第二鳍骨2、第三鳍骨3以及第四鳍骨4、连接杆5、磁铁10、磁性联轴器11、锥齿轮8-9、驱动舵机7。
在本实施例中,所述驱动舵机7通过螺栓固定在机器鱼体端盖6的腔体内。第一鳍骨1、第二鳍骨2、第三鳍骨3以及第四鳍骨4通过磁铁10以及磁性联轴器11连接在机器鱼体端盖6的腔体内。所述连接杆5与第一鳍骨1、第二鳍骨2、第三鳍骨3以及第四鳍骨4分别铰接。
在本实施例中,所述磁铁分别位于机器鱼体端盖和鳍骨根部所开孔洞内,将鳍骨连接到机器鱼体端盖上;所述磁铁应具有足够强的磁力,确保连接的可靠性。所述驱动舵机通过螺栓固定在机器鱼体端盖上,通过上位机控制旋转方向和角度,进而控制仿生背鳍的展开角度。
在本实施例中,所述驱动舵机于上位控制机通讯连接,控制背鳍收回状态时鳍骨中线与水平夹角约为25度,展开时该角度变化为90度。
在本实施例中,机器鱼体端盖上部开有腔体,能够在仿生背鳍折叠时给出一定的容纳空间,保证机器鱼外形的连续性,确保在匀速运动阶段的低阻力;所述腔体内侧还开有数个孔洞,能够将磁铁固定在内部,保证鳍骨固定位置的准确性;所述腔体侧壁在保证强度要求的同时应足够薄,确保磁铁的磁力不会被过度削减,保证鳍骨连接的可靠性;所述腔体一端为环状,能够保证磁性联轴器在其内部有足够空间进行旋转。
在本实施例中,驱动舵机7的输出轴与第二锥齿轮9连接,通过啮合的方式将输出动力传向第一锥齿轮8。同样的,第一锥齿轮8与磁性联轴器11连接,所述磁性联轴器11内部与第一鳍骨1连接,连接方式可通过键轴或一体化加工等方式,凡能达到第一鳍骨1与磁性联轴器11同步旋转的连接方式均满足本发明要求。所述磁性联轴器为一对,分别固连于从动锥齿轮和主动鳍骨根部,保证连接的同时,保证将旋转运动传递到主动鳍骨上;所述磁性联轴器的旋转时所接触的机器鱼体端盖表面,应采取相关减阻措施,保证运动的可靠性和高效性。所述锥齿轮分为一对,分别与驱动舵机和磁性联轴器相连,将舵机发出的运动传向磁性联轴器。
在本实施例中,所述第二鳍骨2、第三鳍骨3以及第四鳍骨4均通过磁铁10连接到机器鱼体端盖6的腔体内。所述磁铁10的形状为圆形,限制在机器鱼体端盖6内部所开孔洞内,能够满足第一鳍骨1、第二鳍骨2、第三鳍骨3、第四鳍骨4以磁铁10轴线为轴自由旋转。所述磁铁10应能够提供足够的磁力,以满足旋转过程的稳定性。
在本实施例中,所述连接杆5,分别与第一鳍骨1、第二鳍骨2、第三鳍骨3以及第四鳍骨4铰接。所述连接杆5、第一鳍骨1、第二鳍骨2、第三鳍骨3、第四鳍骨4以及机器鱼体端盖6形成了一组平行四边形四杆机构,第一鳍骨1为主动曲柄,第四鳍骨4为从动曲柄,第二鳍骨2和第三鳍骨3为虚约束,作用是保持运动的平稳性以及使背鳍外形更加仿生。鳍骨连接杆上开有数个孔洞,孔洞间距离与机器鱼体端盖内侧所开孔洞间的距离相同,能够保证鳍骨和连接杆间顺利形成四杆机构,将主动鳍骨的运动传向从动鳍骨,其中部分从动鳍骨作为虚约束存在。
在本实施例中,当动力由磁性联轴器11传向第一鳍骨1后,第一鳍骨1通过连接杆5将动力传向第二鳍骨2、第三鳍骨3以及第四鳍骨4。通过控制驱动舵机7的转动角度可以进一步地控制第一鳍骨1、第二鳍骨2、第三鳍骨3以及第四鳍骨4最终位置。所述第一鳍骨1、第二鳍骨2、第三鳍骨3以及第四鳍骨4外部浇注有一层硅胶软薄膜,薄膜外形按照真实金枪鱼背鳍形状设计。这样设置的目的在于为保证背鳍展开后的连续性,鳍骨上应浇注一层硅胶软薄膜,薄膜形状仿照真实金枪鱼背鳍外形。鳍骨分为主动鳍骨和从动鳍骨,主动鳍骨为第一根鳍骨,与磁性联轴器固连,与鳍骨连接杆铰接;剩余鳍骨为从动鳍骨,通过磁铁连接到机器鱼体端盖,同时与鳍骨连接杆铰接。
在本实施例中,所述鳍骨分为四根,按顺序排列在机器鱼体端盖腔体内;每根鳍骨高度不同,仿照真实鱼类的背鳍轮廓及真实鳍骨长度进行设计;所述鳍骨前后排序按照从高到低的顺序依次排列;每根鳍骨根部开有孔洞,能够容纳磁铁;每根鳍骨同一高度上都开有孔洞,便于和鳍骨连接杆铰接,为保证仿生背鳍能够顺利折叠进入腔体内,部分鳍骨末端进行削尖处理。
在本实施例中,所述第一鳍骨、第二鳍骨、第三鳍骨以及第四鳍骨远离腔体一端削尖。真实鱼类背鳍展开时提升了其机动性及加速性能,因此每根鳍骨高度不同,仿照真实鱼类的背鳍轮廓及真实鳍骨长度进行设计。
本发明通过上述方法,能够完成机器鱼仿生背鳍的展开与折叠。搭配上位机的控制,当机器鱼执行加速或转弯运动时,将仿生背鳍展开,提升其加速和转弯性能;当机器鱼执行匀速运动时,将仿生背鳍折叠,减少其游动阻力。
本发明的保护范围,凡是利用本发明说明书及附图内容所作的等效装置或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种由绳索冗余驱动的柔性仿生机器鱼设计方法及机器鱼
- 一种刚柔耦合变刚度柔性机器鱼的设计方法及其仿生机器鱼
- 一种尾鳍推力性能研究用仿生机器鱼
- 一种尾鳍推力性能研究用仿生机器鱼