确定交通工具的乘客的下车或上车位置
文献发布时间:2024-01-17 01:26:37
相关申请的交叉引用
本专利申请要求于2021年1月12日提交的题为“DETERMINING DROP-OFF OR PICK-UP LOCATIONS FOR PASSENGERS OF VEHICLES(确定交通工具的乘客的下车或上车位置)”的美国专利申请No.17/146,725的优先权,该申请被转让给本申请受让人。所有在先申请的公开内容被认为是本专利申请的一部分并且通过援引被纳入到本专利申请中。
技术领域
本公开总体上涉及配置成用于乘客服务的交通工具,更具体地涉及确定交通工具的乘客的下车或上车位置。
相关技术描述
自动驾驶交通工具(AV)及半自动驾驶交通工具可在基本自动驾驶模式下运行,在此模式下,交通工具在几乎没有或没有来自人类驾驶员的输入的情况下导航通过环境。还可以派遣自动驾驶交通工具在各种下车或上车位置接送乘客,这些位置通常包括指定的停车区,用于停车、接载乘客及放下乘客。
当诸如自动驾驶交通工具的交通工具在某个位置停止或停车供乘客下车和/或上车时,下车或上车位置处或附近的障碍物及危险状况可能会妨碍乘客进入和/或离开交通工具的能力。因此,尽管能够自动导航到规定的乘客下车和/或上车位置,但传统的自动驾驶交通工具可能无法准确确定停车位置,例如,确保附近的障碍物或危险状况不会妨碍或以其他方式影响乘客安全舒适地进入和/或离开自动驾驶交通工具的能力。
概述
本公开的系统、方法及设备可用于配置成用于乘客服务的交通工具,以确定乘客的下车和/或上车位置。在各种实现中,与交通工具相关联的装置包括可通信地耦合到一个或多个处理器的存储器。在一些实现中,一个或多个处理器可被配置成确定交通工具的乘客的预期进入点或离开点。一个或多个处理器可被配置成检测现场或现场附近是否存在障碍物或危险状况。该一个或多个处理器可被配置成:响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于该交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与该现场相关联的下车或上车位置。
在一些实现中,该检测到的障碍物或危险状况可包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、该交通工具前方或后方的小于一定量的空间、或其任意组合。
在一些实现中,可基于乘客的落座位置来确定下车或上车位置。在一些实例中,可基于针对交通工具的乘客的预期进入点或离开点与检测到的障碍物或危险状况是否在该交通工具的同一侧来确定下车或上车位置。在一些方面中,不同的备用下车或上车位置可以基于地图数据、相干光感测系统数据(例如,LIDAR传感器数据)、周围区域的图像、周围区域的视频、雷达、乘客输入、或其任意组合的。在其他方面中,可从所确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。
在一些实现中,可以至少部分地基于乘客的身体限制、乘客的年龄、存在婴儿或儿童随同乘客、或其任意组合来确定备用下车或上车位置。在其他实现中,可基于一个或多个优选下车或上车位置来确定备用下车或上车位置。
在一个实现中,该一个或多个处理器可被配置成:接收乘客愿意忽略检测到的障碍物或危险状况的指示。该一个或多个处理器可被配置成:响应于收到乘客愿意忽略检测到的障碍物或危险状况的指示而保持经确定的下车或上车位置不变。
在一些实现中,一个或多个处理器还可被配置成:确定交通工具中乘客的落座位置。一个或多个处理器还可被配置成:基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置。在一些实例中,一个或多个处理器还可被配置成:至少部分地基于确定乘客的落座位置和预期进入点或离开点在交通工具的同一侧来确定乘客的备用下车位置。
在各种实现中,公开了一种用于控制交通工具的一个或多个操作的方法。在一些实现中,方法可由装置来执行。在一些方面中,装置可以是与交通工具相关联的交通工具控制器。在其他方面,装置可以是交通工具(或交通工具的至少一部分)。在一个实现中,方法包括确定交通工具的乘客的预期进入点或离开点。方法包括检测现场或现场附近是否存在障碍物或危险状况。方法包括响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置。
在一些实现中,检测到的障碍物或危险状况可包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
在一些实现中,可基于乘客的落座位置来确定下车或上车位置。在一些实例中,可基于交通工具的乘客的预期进入点或离开点及检测到的障碍物或危险状况是否在交通工具的同一侧来确定下车或上车位置。在一些方面中,不同的备用下车或上车位置可以基于地图数据、相干光感测系统数据(例如,LIDAR传感器数据)、周围区域的图像、周围区域的视频、雷达、乘客输入、或其任意组合的。在其他方面中,可从经确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。
在一些实现中,可以至少部分地基于乘客的身体限制、乘客的年龄、存在婴儿或儿童随同乘客、或其任意组合来确定备用下车或上车位置。在一些实现中,可基于一个或多个优选下车或上车位置来确定备用下车或上车位置。
在一个实现中,方法还可包括:接收乘客愿意忽略检测到的障碍物或危险状况的指示。方法还可包括:响应于收到乘客愿意忽略检测到的障碍物或危险状况的指示而保持经确定的下车或上车位置不变。
在一些实现中,方法还可包括:确定交通工具中乘客的落座位置。方法还可包括:基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置。在一些实例中,方法还可包括至少部分地基于确定乘客的落座位置和预期进入点或离开点在交通工具的同一侧来确定乘客的备用下车位置。
在各种实现中,公开了一种系统。在一些实现中,系统可包括:用于确定交通工具的乘客的预期进入点或离开点的装置。系统可包括:用于检测现场或现场附近是否存在障碍物或危险状况的装置。系统可包括:用于响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置的装置。
在一些实现中,检测到的障碍物或危险状况可包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
在一些实现中,可基于乘客的落座位置来确定下车或上车位置。在一些实例中,可基于交通工具的乘客的预期进入点或离开点及检测到的障碍物或危险状况是否在交通工具的同一侧来确定下车或上车位置。在一些方面中,不同的备用下车或上车位置可以基于地图数据、相干光感测系统数据(例如,LIDAR传感器数据)、周围区域的图像、周围区域的视频、雷达、乘客输入、或其任意组合的。在其他方面中,可从经确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。
在一些实现中,可以至少部分地基于乘客的身体限制、乘客的年龄、存在婴儿或儿童随同乘客、或其任意组合来确定备用下车或上车位置。在一些实现中,可基于一个或多个优选下车或上车位置来确定备用下车或上车位置。
在一个实现中,系统还可包括:用于接收乘客愿意忽略检测到的障碍物或危险状况的指示的装置。系统还可包括:用于响应于收到乘客愿意忽略检测到的障碍物或危险状况的指示而保持经确定的下车或上车位置不变的装置。
在一些实现中,系统还可包括:用于确定交通工具中乘客的落座位置的装置。系统还可包括:用于基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置的装置。在一些实例中,系统还可包括:用于至少部分地基于确定乘客的落座位置和预期进入点或离开点在交通工具的同一侧来确定乘客的备用下车位置的装置。
在各种实现中,公开了一种存储用于控制交通工具的指令的非瞬态计算机可读介质。在一些实现中,由装置的一个或多个处理器执行指令使得交通工具执行操作。在一个实现中,操作可包括确定交通工具的乘客的预期进入点或离开点。操作可包括检测现场或现场附近是否存在障碍物或危险状况。操作可包括响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置。在一些方面中,装置可以是与交通工具相关联的交通工具控制器。在其他方面,装置可以是交通工具(或交通工具的至少一部分)。
在一些实现中,检测到的障碍物或危险状况可包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
在一些实现中,可基于乘客的落座位置来确定下车或上车位置。在一些实例中,可基于针对交通工具的乘客的预期进入点或离开点及检测到的障碍物或危险状况是否在交通工具的同一侧来确定下车或上车位置。在一些方面,不同的备用下车或上车位置可以基于地图数据、相干光感测系统数据(例如,LIDAR传感器数据)、周围区域的图像、周围区域的视频、雷达、乘客输入、或其任意组合的。在其他方面中,可从经确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。
在一些实现中,可以至少部分地基于乘客的身体限制、乘客的年龄、存在婴儿或儿童随同乘客、或其任意组合来确定备用下车或上车位置。在一些实现中,可基于一个或多个优选下车或上车位置来确定备用下车或上车位置。
在一种实现中,操作可包括接收乘客愿意忽略检测到的障碍物或危险状况的指示。这些操作可包括响应于收到乘客愿意忽略检测到的障碍物或危险状况的指示而保持经确定的下车或上车位置不变。
在一些实现中,这些操作可包括确定交通工具中乘客的落座位置。这些操作可包括基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置。在一些实例中,这些操作还可包括至少部分地基于确定乘客的落座位置和预期进入点或离开点在交通工具的同一侧来确定乘客的备用下车位置。
本公开中所描述的主题内容的一种或多种实现的详情在附图及以下描述中阐述。其他特征、方面和优点将从该描述、附图和权利要求书中变得明了。应注意,以下附图的相对尺寸可能并非按比例绘制。
附图简述
图l示出了示例系统的示意图。
图2示出了图l示例系统的功能框图。
图3示出了根据本公开的一些方面的自动驾驶交通工具的框图。
图4A-4C示出了根据一些实现描绘交通工具修改下车或上车位置的解说。
图5A-5C示出了根据一些其他实现描绘交通工具修改下车或上车位置的解说。
图6A示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作的流程图。
图6B示出描述了根据其他实现的用于确定乘客下车或上车位置的示例操作的流程图。
图7A示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作的流程图。
图7B示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作的流程图。
图8A示出描述了根据一些实现的用于确定备用下车位置的示例操作的流程图。
图8B示出描述了根据一些实现的用于确定备用下车位置之一的示例操作的流程图。
图9示出描述了根据其他实现的用于确定乘客下车或上车位置的示例操作的流程图。
图10示出了描述了根据一些实现的用于确定障碍物或危险状况位置的示例操作的流程图。
图11示出描述了根据一些实现的用于确定一个或多个备选下车或上车位置的示例操作的流程图。
图12示出描述了根据其他实现的用于确定一个或多个备选下车或上车位置的示例操作的流程图。
图13示出描述了根据其他实现的用于确定备用下车位置的示例操作的流程图。
图14示出描述了根据一些实现的用于确定新乘客上车位置的示例操作的流程图。
图15示出描述了根据其他实现的用于确定一个或多个备选下车或上车位置的示例操作的流程图。
图16示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作的流程图。
图17示出了根据一些实现的描绘用于接收来自乘客的指示的示例操作的流程图。
各个附图中相似的附图标记和命名指示相似要素。
详细描述
本公开的各方面在以下针对出于解说目的提供的各种示例的描述和相关附图中提供。可设计替换方面而不脱离本公开的范围。另外,本公开中众所周知的元素将不被详细描述或将被省去以免湮没本公开的相关细节。
本领域技术人员将领会,以下描述的信息和信号可使用各种不同技术和技艺中的任何一种来表示。例如,贯穿以下描述可能被述及的数据、指令、命令、信息、信号、位(比特)、码元以及码片可部分地取决于具体应用、部分地取决于所期望的设计、部分地取决于对应技术等而由电压、电流、电磁波、磁场或磁粒子、光场或光粒子、或其任意组合表示。
此外,许多方面以由例如计算设备的元件执行的动作序列的形式来描述。将认识到,本文中所描述的各种动作能由专用电路(例如,专用集成电路(ASIC))、由正被一个或多个处理器执行的程序指令、或由这两者的组合来执行。另外,本文中所描述的动作序列可被认为是完全体现在任何形式的非瞬态计算机可读存储介质内,该非瞬态计算机可读存储介质中存储有一经执行就将使得或指令设备的相关联处理器执行本文中所描述的功能性的相应计算机指令集。由此,本公开的各个方面可以数种不同形式体现,所有这些形式都已被构想为落在所要求保护的主题内容的范围内。另外,对于本文中所描述的每一方面,任何此类方面的对应形式可在本文中被描述为例如“被配置成执行所描述的动作的逻辑”。因此,尽管本文相对于自动驾驶或半自动驾驶交通工具(也称为自动驾驶汽车或“SDC”)进行了描述,但本公开的各方面可在其他交通工具内实现,诸如(但不限于)汽车、卡车、摩托车、公共汽车、船、直升机、机器人、无人驾驶飞行器、休闲交通工具、游乐园交通工具、建筑设备和高尔夫球车。
交通工具可被配置成在自动驾驶或半自动驾驶模式中操作,并且在该模式中时在很少或没有来自驾驶员的输入的情况下导航通过环境。这些自动驾驶和半自动驾驶交通工具通常包括数个传感器,这些传感器被配置成确定关于交通工具运行的环境的信息。传感器可包括可检测环境中的多个对象(诸如其他交通工具、行人、交通信号、障碍物等)并确定自动驾驶交通工具和多个对象之间的距离的一个或多个光检测和测距(LIDAR)设备。自动驾驶和半自动驾驶交通工具还可包括其他类型的传感器,包括,例如(但不限于)声纳设备、雷达设备、相机和音频感测设备。来自LIDAR和/或其他类型的传感器的数据可被用于确定检测到的对象的各种特征和特性(诸如对象的位置、大小、形状、类型、移动、方向等)。
一些自动驾驶交通工具可被用于或被配置成用于客运服务和/或货运服务(例如,递送服务)。例如,用户可向乘客分派服务提供上车位置和/或下车位置,该乘客分派服务可将乘客上车和下车位置中继到自动驾驶交通工具。用户可以按各种方式指示或指定下车和上车位置,包括(但不限于)例如通过使用用户的客户端设备的当前位置,通过使用与用户的简档相关联的最近或所保存的位置,或者通过输入地址或点击客户端设备上呈现的地图上的位置。客户端设备可将下车和/或上车位置发送到乘客分派服务,其进而可安排自动驾驶交通工具接载该乘客并将该乘客运输到所指定的下车位置。
然而,并非所有位置对于作为乘客(或货物)上车或下车位置而言都适合、安全或可行。例如,障碍物及危险状况(诸如坑洞、不平的人行道、施工屏障及其他交通工具)可能会妨碍自动驾驶交通工具安全接载及放下乘客的能力。根据本公开的一些方面,公开了系统、方法及装置,这些系统、方法及装置可允许提供乘客(或货物)服务的自动驾驶交通工具基于在经调度的下车或上车位置处或附近存在的障碍物或危险状况、自动驾驶交通工具的乘客(和/或货物)的一个或多个条件、自动驾驶交通工具运输的乘客的相对位置、或其任意组合来选择性地修改经调度的下车或上车位置。
各种实现总体上涉及交通工具确定乘客的合适的上车和/或下车位置。一些实现更具体地涉及确定乘客上车和/或下车位置,这些位置没有障碍物、危险状况及其他可能对相应的乘客造成伤害、可能阻碍相应的乘客进入或离开交通工具,或者其他可能会给相应的乘客带来不便的状况。在一个示例实现中,诸如(但不限于)交通工具控制器之类的装置可用于协助或控制配置成用于乘客服务的交通工具。在一些方面中,装置可确定交通工具的乘客的预期进入点或离开点。该装置可检测现场或现场附近是否存在障碍物或危险状况。该装置包括响应于检测到该现场或该现场附近存在该障碍物或危险状况,至少部分地基于该交通工具的该乘客的该预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与该现场相关联的下车或上车位置。
在一些实现中,装置可检测经确定的下车或上车位置的地区的或区域内的障碍物及危险状况。在一些实例中,经确定的下车或上车位置的地区或区域可能包括周围环境的部分,这些部分位于经确定的下车或上车位置的特定距离(例如大约15到50英尺或其他范围)内。在其他实例中,经确定的下车或上车位置的地区或区域可能包括在经确定的下车或上车位置时在交通工具一定距离(例如大约15到50英尺或其他范围)内的周围环境部分。
在各种实现中,还可基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定下车或上车位置。例如,当检测到的障碍物或危险状况与相应的乘客的预期离开点位于交通工具的同一侧并且可能阻止或阻碍一个或多个乘客进入或离开交通工具时,装置可确定备用下车或上车位置,以确保检测到的障碍物或危险状况不会阻止、阻碍或使相应的乘客在离开交通工具时其路径不安全。相反,当检测到的障碍物或危险状况位于与相应的乘客的预期离开点不同的一侧时,例如,当检测到的障碍物或危险状况不可能阻止或阻碍乘客进出交通工具时,交通工具可能会停止并在原始或经调度的下车位置让相应的乘客下车。
如本文所用,备用下车或上车位置是指与原经调度的下车或上车位置不同,但与原经调度的下车或上车位置足够接近的位置,以便将原经调度的下车或上车位置与备用下车或上车位置与相同的目的地相关联。即,当交通工具确定寻找可行的备用下车或上车位置时(例如,由于最初经调度的下车或上车位置存在障碍物或危险状况),交通工具不会改变乘客的目的地。作为替代,交通工具在原经调度的下车或上车位置的一定距离内(例如,步行5分钟,在1-2个街区内等)放下乘客或接载乘客。特定距离通常为相对较短的距离(例如,步行几分钟,在1-2个街区内等),乘客从备用位置而非从原始位置步行到目的地(或从目的地步行到备用位置而非到原始位置)会感到舒适。
当然,舒适程度可能因乘客/使用者、情况和/或他们的要求(例如,携带行李或婴儿)而异。在一些实现中,特定距离可由乘客(例如,在车内、在移动设备上等)或其他方配置。在一些实例中,可基于各种情况来调整特定距离(例如,自动地或响应于用户/乘客确认)。例如,如果检测到降雨,则特定距离可能会减少(例如,减少一半或另一量)。类似地,如果温度和/或湿度(或其他天气状况)超过或低于某个关值,则可以相应地缩短特定距离。作为另一示例,如果乘客迟到(例如,由乘客设备、简档等中的日历约会确定),则可以缩短特定距离以节省时间。另一示例,如果乘客的每日步数(或其他健康指标,诸如燃烧的卡路里)较低,则特定距离可能会增加。
在各种实现中,交通工具可检测乘客的一种或多种状况(当前乘客或将被接载的潜在乘客)。交通工具可基于乘客是否需要额外的时间和/或空间进入或离开交通工具来确定乘客的下车或上车位置,例如,考虑到乘客的状况。在一些情况下,相应的乘客的状况可能包括(但不限于)相应的乘客的身体残疾或限制、存在婴儿或儿童随同相应的乘客、乘客的年龄、相应的乘客带有相对大量的行李、货物或装备,或其任意组合。然而,在确定乘客的下车或上车位置时,可使用可能导致乘客需要额外时间或空间进出交通工具的任何乘客状况或要求。
在一些实例中,在确定一个或多个备用下车或上车位置时,可考虑经调度的下车或上车位置的一个或多个属性。一个或多个属性可能包括(但不限于)水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物(如消防栓、墙壁、树木等)、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间,或其任意组合中的至少一者。例如,当交通工具确定相应的乘客需要额外的空间离开交通工具时(例如,因为乘客在后备箱中有大量行李箱,并且与婴儿一起旅行),交通工具可选择一个备用下车位置,该位置为交通工具侧面提供额外空间用于卸除婴儿,为交通工具后面提供额外空间用于卸除行李箱,提供与照顾婴儿相关联的额外时间,或其任意组合。相反,当交通工具未确定相应的乘客需要额外的时间或空间时,交通工具的可继续行驶至经调度的下车位置。
在一些实例中,乘客可能会(直接地或通过中介(诸如乘客分派服务等)间接地)向交通工具指示,在乘客分别上车及下车期间,他们是否需要额外的时间和/或空间进入或离开交通工具。在进一步的实现中,乘客可指示其所需的大致时间(例如,5分钟)和/或空间(例如,交通工具后方10英尺的净空)。因此,交通工具可使用该指示修改下车或上车位置。在一些实现中,乘客可提供可能影响其额外时间和/或空间要求的细节或其他信息(例如,带婴儿及儿童安全座椅旅行;带多个行李箱旅行等)。因此,交通工具可使用这些细节修改下车或上车位置。例如,交通工具可修改下车或上车位置以适应这些细节。
在一些实现中,交通工具可在显示屏(例如,交通工具内的显示屏等)上显示数个备用下车位置,供乘坐交通工具的乘客查看。相应的乘客可选择显示屏上显示的备用下车位置之一。交通工具可行驶到相应的乘客所选择的备用下车位置并放下相应的乘客。在一些实例中,备用下车位置可被呈现在与交通工具相关联的显示屏上。附加地或替代地,备用下车位置或备用上车位置可与一个或多个乘客的移动计算设备共享,可在其显示器(诸如触敏显示屏)上呈现备用下车或上车位置以供查看及与相应的乘客互动。例如,备用下车或上车位置可以作为可选择的图标呈现在乘客的移动计算设备的触敏显示屏上。乘客可通过触摸、轻触或以其他方式与对应于特定备用下车或上车位置的可选择的图标互动来选择特定备用下车或上车位置。
可实现本公开中所描述的主题内容的特定实现以达成以下潜在优点中的一者或多者。通过允许交通工具(诸如自动驾驶交通工具)基于下车和/或上车位置处或附近存在的障碍物或危险状况来确定乘客下车和/或上车位置,本文公开的技术主题方面可确保此类交通工具的乘客在进入或离开交通工具时不会受到障碍物或危险状况的阻碍或不便。此外,实施本文公开的各种技术以基于乘客偏好和/或需求动态确定一个或多个备用下车和/或上车位置的交通工具的能力可确保乘客需要额外时间进入或离开交通工具、乘客需要额外空间进入或离开交通工具、和/或具有某些身体属性或限制的乘客在容纳这些乘客的位置接载及放下乘客。以此方式,实现本文所公开技术主题的各个方面的交通工具可以比传统交通工具更安全、更方便地接载及放下乘客。
现在将参考各种装置及方法显示提供乘客和/或货物服务的诸如自动驾驶交通工具的交通工具的几个方面。这些装置和方法将在以下详细描述中进行描述并在附图中由各种框、组件、电路、过程、算法等(统称为“元素”)来解说。这些元素可使用电子硬件、计算机软件、或其任意组合来实现。此类元素是实现成硬件还是软件取决于具体应用和加诸于整体系统上的设计约束。
作为示例,元素、或元素的任何部分、或者元素的任意组合可被实现为包括一个或多个处理器的“处理系统”。处理器的示例包括:微处理器、微控制器、图形处理单元(GPU)、中央处理单元(CPU)、应用处理器、数字信号处理器(DSP)、精简指令集计算(RISC)处理器、片上系统(SoC)、基带处理器、现场可编程门阵列(FPGA)、可编程逻辑器件(PLD)、状态机、门控逻辑、分立的硬件电路以及其他配置成执行本公开中通篇描述的各种功能性的合适硬件。处理系统中的一个或多个处理器可以执行软件。软件应当被宽泛地解释成意为指令、指令集、代码、代码段、程序代码、程序、子程序、软件组件、应用、软件应用、软件包、例程、子例程、对象、可执行件、执行的线程、规程、函数等,无论其是用软件、固件、中间件、微代码、硬件描述语言、还是其他术语来述及皆是如此。
相应地,在一个或多个示例实现中,所描述的功能可以在硬件、软件、或其任意组合中实现。如果在软件中实现,则各功能可作为一条或多条指令或代码存储或编码在计算机可读介质上。计算机可读介质包括计算机存储介质。存储介质可以是可由计算机访问的任何可用介质。作为示例而非限制,此类计算机可读介质可包括随机存取存储器(RAM)、只读存储器(ROM)、电可擦除可编程ROM(EEPROM)、光盘存储、磁盘存储、其他磁性存储设备、上述类型的计算机可读介质的组合、或能够被用于存储可被计算机访问的指令或数据结构形式的计算机可执行代码的任何其他介质。
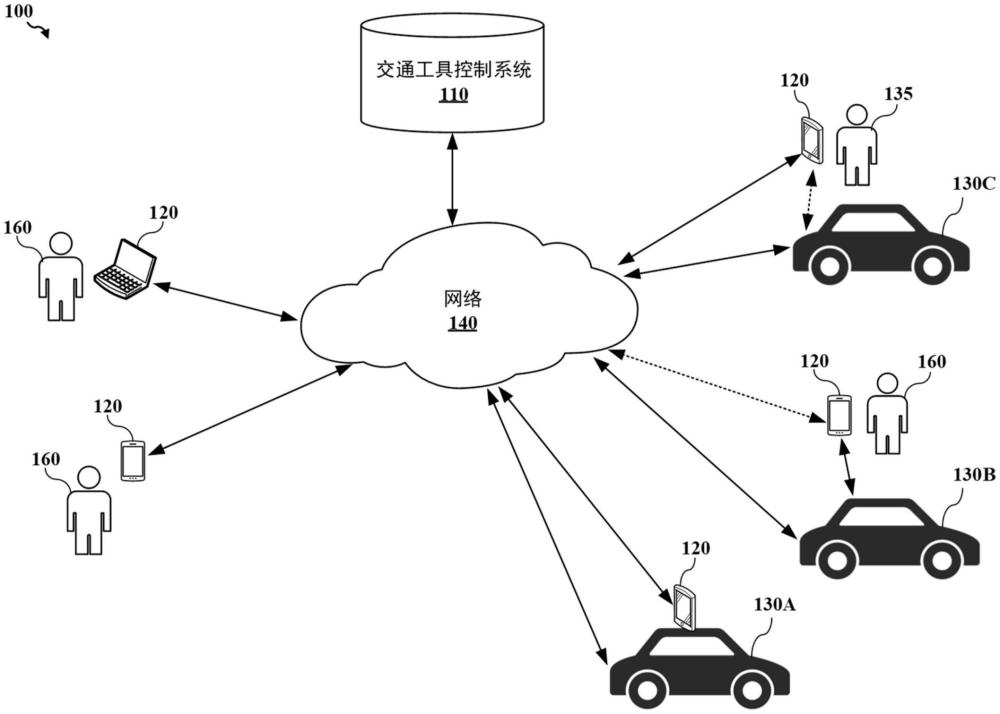
图1示出了在其中可实现本文所公开的主题内容的各方面的示例系统100的示意图。系统100包括交通工具控制系统110、一个或多个客户端设备120、交通工具130A-130C及通信网络140。在一些实现中,示例系统可以包括其他数量的客户端设备120和/或交通工具130。附加地或替代地,示例系统100可以包括为简单起见未示出的其他组件、设备或系统。
交通工具控制系统110可包括任意数量的计算设备,诸如(但不限于)可在单个位置中或跨多个位置分布来实现的服务器。服务器可以是各种类型的服务器,诸如,web服务器、新闻服务器、文件服务器、应用服务器、数据库服务器、代理服务器或适合执行本文所描述功能或过程的任何其他服务器,或其任意组合。每个服务器可为跨越多台计算机或多个数据中心的单一服务器或分布式服务器,并且可以包括硬件、软件或嵌入式逻辑组件,或者两个或多个此类组件的组合,以用于执行由服务器实现或支持的适当功能。
交通工具控制系统110可用于协助以自动驾驶模式运行的协助交通工具130A-130C(本文统称为交通工具130),并被配置用于提供乘客和/或货物服务,以选择、标识或以其他方式确定乘客的下车和/或上车位置。在一些实现中,交通工具控制系统110可确定没有障碍物及危险状况的乘客下车和/或上车位置。交通工具控制系统110还可以至少部分地基于乘客的一个或多个身体属性、乘客的身体限制、乘客的年龄、存在婴儿或儿童随同乘客、或其任意组合来确定乘客的下车和/或上车位置。附加地或替代地,交通工具控制系统110还可以基于乘客是否需要额外的时间或空间来进入或离开自动驾驶交通工具来确定乘客下车和/或上车位置。
在一些实现中,交通工具控制系统110可促进交通工具130中一个或多个乘客160的运输。例如,交通工具控制系统110可以接收来自乘客160的服务请求(例如,经由乘客的客户端设备120),以及请求乘客160的标识符。乘客标识符可向交通工具控制系统110标识乘客160,例如,使交通工具控制系统110能够检索(但不限于)乘客偏好、支付方法、优选上车或下车位置或任何其他适当信息。
客户端设备120可以是能够经由通信网络140与交通工具控制系统110、交通工具130或其他通信设备、节点或实体通信的任何合适的计算机或计算设备。在一些实例中,客户端设备120可以是台式计算机、膝上型计算机、个人数字助理、蜂窝电话、智能电话、平板计算机、游戏机、电子书阅读器或另一合适的通信设备。一些客户端设备120可与交通工具130的乘客160相关联,而其他客户端设备120可与交通工具130的人类驾驶员135相关联。例如,在一些实例中,乘客可使用客户端设备120请求或调度交通工具130之一的乘客服务,并且可使用客户端设备120在经请求或经调度的乘客服务期间与交通工具130交换信息。在其他情况下,人类驾驶员135可使用客户端设备120与一个或多个乘客160通信及交换信息,并与交通工具控制系统110及交通工具130通信及交换信息。在一些其他情况下,交通工具130中的一个或多个可包括客户端设备120中的一个或可与客户端设备120中的一个相关联。
交通工具130可为任何合适类型的自动驾驶交通工具或半自动驾驶交通工具,可用于在自动驾驶模式下提供乘客和/或货物服务。尽管为了简单起见未在图l中示出,但交通工具130可包括自动驾驶交通工具控制器、通信电路系统、用户接口及通常包括在交通工具中的其他组件,这些组件可在提供乘客服务的同时以自动(或半自动)驾驶模式运行。在一些实现中,在交通工具130内提供的或与交通工具130相关联的交通工具控制器可以执行参考交通工具控制系统110描述的一些或所有操作。
通信网络140提供交通工具控制系统110、客户端设备120与交通工具130之间的通信链路。网络140可以是任何合适的一个或多个通信网络,包括例如因特网、广域网(WAN)、城域网(MAN)、无线局域网(WLAN)、诸如蓝牙之类的个人局域网(PAN)、诸如第五代(5G)新无线电(NR)系统的无线电接入网络(RAN)、有线网络、电缆网络、卫星网络或其他合适的网络中的一者或多者。
图2示出了根据一些实现的示例系统200的功能框图。系统200(其可以是图1的系统100的示例的)被示为包括图1的交通工具控制系统210、客户端设备220、自动驾驶交通工具230及通信网络140。交通工具控制系统210(其可以是图l中交通工具控制系统110的示例)被示为包括一个或多个处理器212、存储器214、一个或多个应用216及通信电路系统218。处理器212可以是或可包括能够执行存储在相关联存储器中的一个或多个软件程序的脚本或指令的任何数目的商业可用的微处理器或中央处理单元(CPU)。附加地或替代地,处理器212可以是或可包括任意数量的专用集成电路(ASIC)、现场可编程门阵列(FPGA)或可编程逻辑器件(PLD)。
存储器214可包括存储指令的非瞬态计算机可读介质(诸如一个或多个非易失性存储器元件,诸如EPROM、EEPROM、闪存、硬盘驱动器等),当指令由一个或多个处理器212执行时,导致交通工具控制系统210执行参考图6A-6B、7A-7B、8A-8B、9、10、11、12、13、14、15、16及17中的一个或多个所描述的至少部分操作。在一些实例中,存储器214可存储可由一个或多个处理器212执行以执行某些功能的应用216。例如,可执行驻留在交通工具控制系统210的存储器内的交通工具控制器应用,以与自动驾驶交通工具230通信并控制其各种操作。在一些实例中,当为乘客和/或货物选择下车或上车位置时,例如,当基于一个或多个检测到的障碍物或危险状况、特定乘客的身体限制、或乘客需要额外时间和/或空间进入或离开自动驾驶交通工具来修改所选下车或上车位置时,以及当选择备用下车或上车位置时,交通工具控制器应用可用于协助或操作自动驾驶交通工具230。
通信电路系统218可用于经由通信网络140建立及维护交通工具控制系统210、客户端设备220及自动驾驶交通工具230之间的通信链路。通信电路系统218可使用任何合适的通信协议,包括例如一个或多个第三代合作伙伴计划(3GPP)版本、IEEE 802.11标准族的一个或多个修订版、蓝牙兴趣小组或其他合适的通信技术指定的无线通信协议。
可以是图l的客户端设备120的一示例的客户端设备220被显示为包括一个或多个处理器222、存储器224、显示屏226及通信电路系统228。处理器222可以是或可包括能够执行存储在相关联存储器中的一个或多个软件程序的脚本或指令的任何数目的商业可用的微处理器或中央处理单元(CPU)。附加地或替代地,处理器212可以是或可以包括任意数量的ASIC、FPGA或PLD。存储器224可包括存储指令的非瞬态计算机可读介质(诸如一个或多个非易失性存储器元件,诸如EPROM、EEPROM、闪存、硬盘驱动器等),当该指令由一个或多个处理器222执行时导致客户端设备220执行本文所描述的至少一些操作。显示屏226可以是能够接收来自用户的输入并向用户呈现输出的任何合适的显示屏。通信电路系统228可用于通过通信网络140建立及维护客户端设备220、交通工具控制系统210及自动驾驶交通工具230之间的通信链路。通信电路系统228可使用任何合适的通信协议,包括一个或多个3GPP版本、IEEE 802.11标准族的一个或多个修订版、蓝牙兴趣小组或其他合适的通信技术指定的无线通信协议。
客户端设备220可供乘客、自动驾驶交通工具的人类副驾驶员使用,或可在自动驾驶交通工具内提供。例如,乘客可以使用客户端设备120请求由自动驾驶交通工具提供的乘客服务、更新下车或上车位置、支付乘车费用以及其他功能。人类副驾驶员可以使用客户端设备120与一个或多个乘客、交通工具控制系统210及其他自动驾驶交通工具通信。自动驾驶交通工具可以使用客户端设备120与乘客、交通工具控制系统210以及其他自动驾驶交通工具通信。
自动驾驶交通工具230可以是图l中交通工具130的示例,可以是能够在自动驾驶模式或半自动驾驶模式下运行时提供乘客服务的任何合适类型的交通工具。自动驾驶交通工具230可包括交通工具控制器232、通信电路系统234及用户接口236。交通工具控制器232可用于控制与提供乘客服务有关的自动驾驶交通工具300的各种操作。例如,交通工具控制器232可以控制以下操作:在指定的上车位置接载乘客,在指定的下车位置放下乘客,基于检测到的障碍物或危险状况、乘客的身体限制、某些乘客需要额外的时间或空间进入或离开自动驾驶交通工具的指示以及其他因素或状况来修改指定的上车或下车位置。通信电路系统234可用于经由通信网络140建立及维护交通工具控制系统210、客户端设备220及自动驾驶交通工具230之间的通信链路。用户接口236可用来向乘客呈现信息。用户接口236可用来接收来自乘客的用户输入(诸如命令及偏好)。
图3示出了根据一些实现的自动驾驶交通工具300(可对应于图1及图2的自动驾驶交通工具130、230)的框图。自动驾驶交通工具300可以是任何类型的交通工具,包括(但不限于)轿车、卡车、面包车、公共汽车、有轨电车、火车、地铁、飞机、船只等,而不论其动力或驱动方式如何。在一些实现中,自动驾驶交通工具300可包括自动驾驶交通工具控制器310、通信接口360、驱动系统370、外部传感器372、导航系统374、内部传感器376及用户接口378。自动驾驶交通工具300可包括图3示例中未示出的其他组件。
交通工具控制器310(可能以是图2交通工具控制器232的一示例)可用于确定由自动驾驶交通工具300运送的乘客的下车或上车位置。交通工具控制器310可以使用任何模拟、数字或混合信号处理电路系统来实现,以控制自动驾驶交通工具300的各种操作。在一些实例中,交通工具控制器310可与自动驾驶交通工具300的驱动系统的370、外部传感器372、导航系统374、内部传感器376及用户接口378进行对接和/或控制其操作。例如,交通工具控制器310可以以允许交通工具控制器310在各种上车或下车位置接载或放下乘客时承担自动驾驶交通工具300的各种驾驶和操纵操作的控制的方式与驱动系统370集成。
通信接口360可用于建立及维护交通工具控制系统(诸如图1的交通工具控制系统110或图2的交通工具控制系统210)、一个或多个移动计算设备(诸如图l的客户端设备120或图2的客户端设备220)及自动驾驶交通工具300之间的通信链路。通信接口360可使用任何合适的通信协议,包括例如一个或多个3GPP版本、IEEE 802.11标准族的一个或多个修订版、蓝牙兴趣小组或其他合适的通信技术指定的无线通信协议。
驱动系统370可包括自动驾驶交通工具300的动力传动系统及各种相关电气、机械、机电、控制及诊断系统。在一些实例中,驱动系统370可包括一个或多个引擎、电机、变速箱、转向、制动及其他系统,以控制自动驾驶交通工具300的驾驶及停车操作。
外部传感器372可包括任何合适的传感器或设备,可单独或相互结合使用,以扫描周围场景中的目标、环境特征、道路、路线特征、其他交通工具、交通信号灯、天气状况、障碍物、危险状况及周围场景的其他属性、特征或特性。
外部传感器372可包括光学照相机、图像传感器、摄像机、相干光感测系统、雷达系统或可用于检测和/或识别周围环境中目标的其他合适设备或传感器。在各种实现中,相干光感测系统及雷达系统可用于检测周围环境中目标的存在,确定目标与交通工具120之间的距离,确定被检测目标相对于交通工具120的移动,以及确定周围环境的其他特征及属性。在一些方面中,RADAR系统可包括一个或多个射频(RF)传感器和一个或多个毫米波(mmW)频率传感器。在一些方面,相干光感测系统445可包括一个或多个LIDAR传感器和一个或多个红外(IR)传感器。在一些实现中,由RF传感器、mmW频率传感器、SONAR传感器、LIDAR传感器和/或IR传感器提供的测量可由神经网络用于检测和分类周围环境中的对象。例如,在一些方面,神经网络可采用深度学习和推断技术来识别检测到的对象(例如,识别第一检测到的对象是另一交通工具,第二检测到的对象是停车标志,第三检测到的对象是行人等)。
在一实现中,相干光感测系统可将光或红外(IR)脉冲发射到环境中并且接收被该环境中的对象和其他表面反射的光或IR脉冲以确定关于这些对象和其他表面的信息。在一些方面,到检测到的对象的距离可基于由相干光感测系统发射光或IR脉冲与由相干光感测系统接收到对应经反射光或IR脉冲之间的时间来确定。检测到的对象的大小、形状、取向、纹理和其他特征可(至少部分地)基于众多此类接收到的光或IR脉冲的振幅、脉冲宽度、定时信息和其他特性来确定。从接收到的光或IR脉冲生成的信息可被用于生成指示在环境中检测到的对象和其他表面的位置、大小、形状、移动、取向和其他特征的点云。测得的距离可与发射机的取向相结合以将三维位置与由相干光感测系统接收的每个光或IR脉冲相关联。与多个接收到的光或IR脉冲相关联的三维(3D)位置可被用于生成指示环境中各种对象和特征的位置的3D点图。自动驾驶交通工具300可使用这些3D点云中的一者或多者来导航通过环境(诸如沿着下车或上车位置之间的路线)而无需人类输入。
在一些实现中,第一组外部传感器372可配置成检测和/或识别障碍物、危险状况、以及相对靠近特定下车或上车位置(诸如位于特定下车或上车位置周围或相关联区域内)的其他乘客障碍。第二组外部传感器372可配置成扫描场景中相对较远的区域,以检测和/或识别目标、环境特征、地标、建筑物、道路、以及与特定下车或上车位置相对较远的场景(例如位于特定下车或上车位置周围或与之关联的区域之外)的其他属性。区域可以是各种大小、形状或配置,例如基于特定下车或上车位置的属性或特征、一个或多个乘客的状况、乘客偏好及其他合适的因素。以此方式,第一组外部传感器372可配置成用于近距离扫描,而第二组外部传感器372可配置成用于远距离扫描。
在各种实现中,由第一组外部传感器372提供或推导的场景映射信息可以与由第二组外部传感器372提供或推导的场景映射信息进行融合、拼接或以其他方式组合,以生成整个场景的合成3D点云。以此方式,合成3D点云可以指示相对于远处目标、环境特征、地标、建筑物、道路及场景的其他属性的附近存在的障碍物以及危险状况。在一些实例中,与使用与场景的相对较近区域相关联的场景映射信息相比,可以以更低的更新频率来使用与场景的相对较远区域相关联的场景映射信息更新合成3D点云。例如,当环境要素、目标以及距离自动驾驶交通工具300相对较远的其他表面的位置或方向在一段时间内保持不变(或具有微小变化)时,在此期间,在离下车或上车位置(或自动驾驶交通工具300)相对较近的位置检测到新的障碍物或危险状况,则自动驾驶交通工具300可以相比使用远处场景映射信息更频繁地使用附近场景映射信息更新合成3D点云。在其他实例中,与使用与场景的相对较近区域相关联的场景映射信息相比,可以更频繁地使用与场景的相对较远区域相关联的场景映射信息更新合成3D点云。在一些其他实例中,可以以相同或相似的次数使用所有场景映射信息更新合成3D点云。
可在自动驾驶交通工具300上或内部的任何适当位置提供导航系统374。导航系统374可以使用地图数据及传感器数据来引导自动驾驶交通工具300到达目的地,而不会碰撞(或以其他方式避免)其他目标。导航系统374还可以使用地图数据及传感器数据来检测经调度的下车或上车位置处或附近存在的障碍物及危险状况。在一些实现中,导航系统374可以访问或接收详细的地图信息(诸如3D点云),其包括关于道路、桥梁、建筑物、地标、高架、施工区、实时交通状况、天气信息、事件信息,以及直接来自一个或多个来源(诸如(但不限于)政府机构、基于订用的服务、用户生成的地图收集、众包地图信息、由其他设备提供的地图信息等)的类似信息(例如,没有中间系统或服务)。在其他实现中,导航系统374可以从服务器(或其他中间系统或服务)访问或接收详细的地图信息(诸如3D点云),服务器(或其他中间系统或服务)至少在一些实例中可以聚合详细的地图信息。在一些实例中,详细的地图信息可由网络实体或服务器(诸如图2的交通工具控制系统210)提供。在其他实例中,详细的地图信息(或其至少部分)可由一个或多个其他设备经由适当的无线信道(诸如5G RAN的V2V或V2X信道、5G RAN的侧行链路信道、未经许可的频带、对等(P2P)连接、或无线网络的专用短程通信(DSRC)信道)来提供。实例设备可包括(但不限于)其他交通工具、智能电话、相机或AR/VR头戴式设备。在一个示例实现中,导航系统374可以使用地图数据和/或传感器数据来补充详细的地图信息(例如,当详细的地图信息不完整或不覆盖特定感兴趣区域的整体时)。
在各种实现中,详细的地图信息可用于确定乘客和/或自动驾驶交通工具300的经调度的下车或上车位置是否可行。详细的地图信息可用于检测经调度的下车或上车位置是否存在障碍物或危险状况。详细的地图信息还可用于为自动驾驶交通工具300的乘客标识可行的备用下车或上车位置。在特定实现中,这可以在自动驾驶交通工具300行驶到经调度的下车或上车位置或在抵达经调度的下车或上车位置或其附近之前完成。以此方式,在考虑下车或上车位置的各种属性以及可能与乘客相关联的任何状况的同时,自动驾驶交通工具300可以选择最方便的下车或上车位置的速度及效率可能比依靠自动驾驶交通工具外部传感器提供此类地图信息的传统技术(其中自动驾驶交通工具通常位于下车或上车位置的扫描范围内)大得多。
在一些实现中,可以周期性地或连续地(诸如实时地)通过外部传感器372提供的或从外部传感器372推导的映射信息来融合、拼接或过滤详细的映射信息。在一些实例中,可以使用可从外部传感器374获得的映射信息来更新详细的映射信息的一个或多个部分。例如,自动驾驶交通工具300可以使用接收到的详细的地图信息,在上车之前确定乘客的特定下车位置是可行的。当自动驾驶交通工具300接近下车位置时,外部传感器372随后可标识一个或多个障碍物。在此示例中,详细的地图信息未指示下车位置处或附近的任何障碍物,并因此外部传感器372提供的地图信息更为新颖且更为准确。因此,自动驾驶交通工具300可以使用由外部传感器372提供的映射信息来确定乘客的下车位置是否仍然可行。
在一些实现中,导航系统374可包括一个或多个卫星定位系统(SPS)接收器,接收器可接收和解码与各种全球卫星服务(诸如全球定位系统(GPS)、全球导航卫星系统(GLONASS)和伽利略)以及各种区域性卫星服务(诸如印度区域性导航卫星系统(IRNSS))相关联的卫星信号。卫星信号可由自动驾驶交通工具300用于一般导航目的,包括例如确定上车位置及下车位置之间的路线,并然后沿经确定的路线将自动驾驶交通工具300从上车位置安全地操纵到下车位置。在一些实例中,自动驾驶交通工具300还可以使用接收到的卫星信号来确定或构建用于上车和/或下车位置的映射信息。
在各种实现中,可将自动驾驶交通工具300配置成确定乘客的落座位置(例如,相对于彼此的特定落座位置位置等)和/或乘客的预期离开点。在一些实现中,内部传感器376可包括可用于确定自动驾驶交通工具300内乘客的落座位置的任何合适的传感器或设备(诸如但不限于压力传感器、运动传感器、光传感器、光学传感器、无线收发机等)。内部传感器376可被用于确定当前乘客相对于彼此的位置。内部传感器376可用来确定来自自动驾驶交通工具300的乘客的估计离开点(和/或其相对于估计离开点的位置)。在一些实例中,在自动驾驶交通工具300的座椅内或附近提供的压力传感器可用于确定特定座椅是否被乘客占用。在其他情况下,分布在自动驾驶交通工具300内部的运动传感器可用于确定乘客是否正在进入自动驾驶交通工具300或离开自动驾驶交通工具300。在一些其他实例中,光传感器可用于确定到自动驾驶交通工具300中每个乘客的距离。
在一些实现中,内部传感器376可包括一个或多个位于自动驾驶交通工具300内的收发机,并配置成与乘客相关联的移动计算设备交换无线信号。交换的无线信号可用于确定乘客相对于彼此、相对于自动驾驶交通工具300的预期进入点和/或相对于自动驾驶交通工具300的预期离开点的位置。在一些情况下,无线传送设备(诸如但不限于存取点(AP)、软AP、无线站台(STA)、用户装备(UE)或一些其他合适的无线通信设备)可以向乘客的移动计算设备传送无线信号并从乘客的移动计算设备接收无线信号。在一些实例中,无线传送设备可位于仪表板中。在一些其他实例中,可在交通工具120的另一适当位置提供无线传送设备。
在一示例实现中,无线传送设备可使用RF感测和/或测距技术来确定传送设备与每个乘客之间的距离,确定乘客的相对位置,和/或确定乘客相对于彼此的移动。RF测距信号可包括(但不限于)Wi-Fi信号、超宽带(UWB)信号、
无线传送设备还可以使用传送及接收的无线信号的信息来确定无线传送设备及每个乘客的移动计算设备之间的距离和/或角度。距离信息和/或角度信息可用来确定每个乘客的移动计算设备相对于无线传送设备的位置,因此也确定相对于彼此、相对于自动驾驶交通工具300的预期进入点和/或相对于自动驾驶交通工具300的预期离开点的位置。无线传送设备可以使用任何合适的定位技术,包括(但不限于)辅助GNSS(A-GNSS)、观察抵达时间差(OTDOA)(例如,下行链路(DL)OTDOA或上行链路(UL)OTDOA)、实时运动学(RTK)、精确点定位(PPP)、差分GNSS(DGNSS)、增强型蜂窝小区ID(E-CID)、抵达角(AOA)、出发角(AOD)、和/或其他定位方法来确定自动驾驶交通工具300中乘客的位置。
用户接口380可以是或可以包括任何合适的设备或组件,通过这些设备或组件,自动驾驶交通工具300可以向乘客提出问题、选项或其他信息,和/或乘客可以向自动驾驶交通工具300提供答案或其他响应信息。在一些实例中,用户接口380可包括平板电脑、触敏显示器、扬声器、麦克风等。例如,在一些方面中,自动驾驶交通工具300可在触敏显示器上指示在指定下车位置处存在坑洞。在其他方面中,自动驾驶交通工具300可在用户设备的显示屏上指示存在坑洞。自动驾驶交通工具300可询问乘客他或她是否愿意选择备用下车位置。可选地,自动驾驶交通工具300可显示备用下车位置的位置(以及可选地用户可从中选择的其他备用位置)。作为响应,乘客可使用触敏显示器指示指定的下车位置是否是可接受的,或是否优选备用下车位置。可在自动驾驶交通工具内的任何适当位置提供用户接口380包括例如嵌入前排座椅的后表面内。在其他实现中,乘客的移动计算设备可以提供用户接口378的一些或全部功能。
交通工具控制器310可包括数据存储320、一个或多个处理器330、存储器340及数个系统引擎350。数据存储320可包括下车/上车位置数据321、导航数据322、进入点/离开点数据323、障碍物数据324及用户简档数据325。下车/上车位置数据321可包括由自动驾驶交通工具运送的乘客的下车位置。下车/上车位置数据321还可包括经调度由自动驾驶交通工具接载的一个或多个乘客的上车位置。在一些情况下,下车/上车位置数据321还可存储与数个先前下车或上车位置相关的历史信息。
导航数据322可包括乘客要求乘坐的路线信息、道路状况、交通状况、天气状况、施工活动、事件状况(例如,临近事件的经调度时间),以及与针对相应的乘客将自动驾驶交通工具300从上车位置导航到下车位置相关联的任何其他信息。在一些实例中,导航数据322可包括地图数据和/或传感器数据,诸如街道视图、卫星视图等。在其他实例中,导航数据322可包括上文讨论的接收到的详细的地图信息。
进入点/离开点数据323可包括指示当前在自动驾驶交通工具300中运送的每个乘客的自动驾驶交通工具300的预期离开点的信息,并可存储指示经调度由自动驾驶交通工具300接载的每个乘客的自动驾驶交通工具300的预期进入点的信息。在一些实例中,进入点/离开点数据323可与存储在下车/上车数据321及障碍物数据324中的一个或两者中的信息相关。在其他实例中,进入点/离开点数据323可指示一个或多个乘客的自动驾驶交通工具300的默认进入点和/或离开点。例如,当自动驾驶交通工具300接近下车位置时,自动驾驶交通工具300可指示一个或多个乘客通过自动驾驶交通工具300的右后门(或另一合适的门)下车。在一些实现中,自动驾驶交通工具300可打开自动驾驶交通工具300的特定车门,以供相应的乘客进入或离开自动驾驶交通工具300。在一些情况下,自动驾驶交通工具300可在接近下车或上车位置时锁定其他车门,例如,以增加乘客的安全性。
障碍物数据324可包括指示数个目标、障碍物和/或危险状况的一个或多个先前检测到的属性、特性或特征的信息。障碍物数据324还可以以绝对值或相对于一个或多个经存储的下车或上车位置指示先前检测到的目标、障碍物或危险状况的精确位置(例如,在50厘米或更小范围内)。在一些情况下,经存储的特定障碍物的属性、特性或特征可用于在自动驾驶交通工具接近相应的下车或上车位置时协助自动驾驶交通工具检测或标识特定障碍物。
用户简档数据325可包括自动驾驶交通工具300的任何数量的过去、现在或预期乘客的简档信息。相应的乘客的简档信息可包括乘客的标识信息(诸如姓名、年龄、身高等),乘客的偏好(诸如,乘客是否通常与婴儿或小孩一起旅行,乘客通常携带的行李或货物数量,当在选定的上车或下车位置处或附近检测到障碍物或危险状况时愿意进入或离开自动驾驶交通工具的意愿等)。在一些实例中,可分别从图l及图2的交通工具控制系统110及200获得部分或全部乘客简档数据。在其他实例中,乘客可以提供至少一些乘客简档数据,诸如通过从乘客的客户端设备120访问简档信息。
在一些实现中,用户简档数据325(或其他简档数据)可包括一个或多个装运服务的简档信息。相应的装运服务的简档信息可指示与将由自动驾驶交通工具300代表相应的装运服务运输的一种或多种类型的货物相关联的特殊要求。例如,特殊要求可能包括(但不限于)耗时的装载或卸除过程,对货物的特定装载/卸除装备的需求(例如,推车、叉车、起重机、坡道、传送带等),装载/卸除货物需要一定量的空间(诸如长度大于某个值的木材、管道、横梁等),或者货物需要专门的装载/卸除区域(诸如有坡道的区域)。在一示例实现中,特殊要求可以指示用于提取包裹或其他递送物品的协议。例如,协议可要求自动驾驶交通工具300等待或以其他方式不占用提货位置处或附近的停车位,直到接收到包裹或其他递送物品已在提货位置处放下的确认。
在各种实现中,用户简档数据325(或其他简档数据)可包括一个或多个递送服务的简档信息。递送服务可包括(但不限于)食品递送服务、处方药递送服务、杂货递送服务等。在一些实现中,各个递送服务的简档信息可以指示与往自动驾驶交通工具300装车/装载供递送的物品相关联的特殊要求。例如,特殊要求可包括(但不限于)餐厅的特定区域,用于停车并等待将送货单装载到自动驾驶交通工具300中,自动驾驶交通工具300将在其中等待将送货单装载到自动驾驶交通工具300中的指定车道,等等。在一些实例中,相应递送服务的简档信息还可以指示与在不同供货商领取送货单(例如来自Chick-fil-a的食品订单)相关联的特殊程序。例如,特殊程序可指示(但不限于)指示食品订单未准备好递送、食品订单已取消、食品订单已装载到自动驾驶交通工具300中等的信号或提示。
在各种实现中,相应递送服务的简档信息可指示与在消费者所在地放下和/或卸除送货单相关联的特殊要求和/或程序。例如,特殊要求可包括(但不限于)供自动驾驶交通工具300停在消费者住所的指定区域并等待消费者从自动驾驶交通工具300取回(或供乘客递送)递送的物品,可包括自动驾驶交通工具300等待消费者从自动驾驶交通工具300取回(或供乘客递送)递送物品的时间段,等等。
处理器330可以是或可包括能够执行存储在相关联存储器中的一个或多个软件程序的脚本或指令的任何数目的商业可用的微处理器或中央处理单元(CPU)。附加地或替代地,处理器330可以是或可以包括任意数量的ASIC、GPU、DSP,NSP,DPU、微控制器、硬件加速器、FPGA、PLD、或其任意组合。
存储器340可包括存储指令的非瞬态计算机可读介质(诸如一个或多个非易失性存储器元件,诸如EPROM、EEPROM、闪存、硬盘驱动器等),当指令由一个或多个处理器330执行时,导致交通工具控制器310执行参考图6、7A-7B、8、9、10、11A-11B、12、13A-13C、14及15所描述的任意数量的操作。指令可以是由处理器330直接(诸如机器码)或间接(诸如脚本)执行的任何指令集。例如,指令可被存储为计算设备可读介质上的计算设备代码。如此,术语“指令”和“程序”在本文可被可互换地使用。指令可以按目标代码格式存储以由处理器直接处理,或者按包括脚本或独立源代码模块的集合的任何其他计算设备语言来存储。
系统引擎350可以包括(但不限于)交通工具控制引擎352、导航引擎354、物体检测引擎356、和乘客定位引擎358。当为乘客确定合适的下车或上车位置时,交通工具控制引擎352可协助或操作自动驾驶交通工具300。交通工具控制引擎352还可在基于在下车或上车位置处或附近检测到障碍物或危险状况、相应的乘客的身体限制、相应的乘客的身体属性、相应的乘客的年龄、存在婴儿或儿童随同相应的乘客、与相应的乘客相关的行李或货物数量,或其任意组合来确定一个或多个备用下车或上车位置时,协助或操作自动驾驶交通工具300。
导航引擎354可用于为自动驾驶交通工具300导航,使其往返于乘客指定的位置(例如,沿着乘客上车位置及乘客下车位置之间的路线)。导航引擎354还可用于选择、标识或确定乘客上车位置及下车位置。导航引擎354可用于修改乘客上车或下车位置。导航引擎354还可用于确定备用乘客上车或下车位置。在一些实例中,导航引擎354可标识或选择上车或下车位置,在这些位置处自动驾驶交通工具300可等待乘客、可停车并等待乘客执行某些任务并进入交通工具,或者停车足够长的时间,让出发的乘客执行一些任务并且然后在没有自动驾驶交通工具的情况下继续前进。如下文更详细地解释的,本文公开的技术主题的各个方面可增加提供乘客服务的自动驾驶交通工具的有用性、安全性及便利性。
目标检测引擎356可用于检测指定下车或上车位置处或附近的障碍物或危险状况。在一些情况下,目标检测引擎356可以使用一个或多个外部传感器376来检测及确定危险/障碍物的位置,诸如(但不限于)水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具,障碍物(例如消防栓、墙壁、树木等)、天气状况、消防线、禁止停车区、所标识的下车或上车位置附近的封闭车道,或在自动驾驶交通工具300前方或后方的空间小于一定量。
在一些实现中,相应乘客的简档信息可指示或标识相应乘客认为在进入和/或离开自动驾驶交通工具方面,多个潜在的障碍物或危险条件中哪些是关系不大或无关的。例如,多个潜在障碍物或危险状况可能包括(但不限于)水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区,在所标识的下车或上车位置附近的封闭车道,或在自动驾驶交通工具前面或后面小于一定量的空间。
在一些实现中,当自动驾驶交通工具300检测到的障碍物或危险状况仅包括被标识为与相应的乘客关系不大或无关的那些障碍物或危险状况时,自动驾驶交通工具300可确定不修改相应的乘客的特定下车或上车位置。例如,如果第一乘客的简档信息指示,当进入或离开自动驾驶交通工具300时,水坑、坑洞、不平的人行道及高路沿关系不大或无关,则自动驾驶交通工具300在特定下车或上车位置的区域内检测到水坑、坑洞、不平的人行道和/或高路沿时将不修改第一乘客的特定的下车或上车位置。以此方式,当自动驾驶交通工具预期进入点或离开点附近有水坑、坑洞、不平的人行道和/或高路沿时,第一乘客可能不会因为必须等待自动驾驶交通工具找到备用下车或上车位置或不得不步行更长的距离到达目的地而感到不便。
在一些实例中,当在特定下车或上车位置的区域内检测到在第一乘客的简档信息中未识别的障碍物或危险状况(如冰块或垃圾)时,自动驾驶交通工具300可以修改第一乘客的特定下车或上车位置。以此方式,第一乘客可以放心地知道,如果在下车或上车位置的区域内检测到除水坑、坑洞、不平的人行道和/或高路沿以外的障碍物或危险状况,则自动驾驶交通工具300将找到备用下车或上车位置。
在各种实现中,不同乘客的简档信息可能指示与进入和/或离开自动驾驶交通工具300关系不大或无关的不同潜在障碍物或危险状况(或根本不存在)。例如,第二乘客的简档信息可指示当进入或离开自动驾驶交通工具300时,垃圾及施工屏障对第二乘客关系不大或无关。基于第二乘客的简档信息,当在特定下车或上车位置的区域内检测到垃圾和/或施工屏障时,自动驾驶交通工具300可以不修改第二乘客的特定下车或上车位置。以此方式,当在自动驾驶交通工具300的预期进入点或离开点附近存在垃圾和/或施工屏障时,第二乘客可能不会因为必须等待自动驾驶交通工具找到备用下车或上车位置或不得不步行更长距离到达目的地而感到不便。相反,当自动驾驶交通工具300检测到与第二乘客有关的障碍物或危险状况(例如,冰块)时,自动驾驶交通工具300可以修改第二乘客的下车或上车位置。以此方式,第二乘客可以放心地知道,如果在下车或上车位置的区域内检测到除垃圾或施工屏障以外的障碍物或危险状况,则自动驾驶交通工具300将找到备用下车或上车位置。
乘客定位引擎358可用于确定自动驾驶交通工具300运载乘客相对于彼此、相对于他们相应的交通工具离开点和/或相对于一个或多个检测到的障碍物或危险状况中的每一者的绝对位置或相对位置。乘客定位引擎358还可确定由自动驾驶交通工具300运载的乘客的落座位置。在一些实例中,乘客定位引擎358可与传感器372及376通信。
图4A-4C示出了相应的图示400A–400C描绘了根据一些实现的诸如自动驾驶交通工具之类的交通工具放下及接载乘客。对于参考图4A-4C讨论的示例操作,自动驾驶交通工具300被调度成在选定位置410放下乘坐自动驾驶交通工具300的第一乘客,并接载在选定位置410附近的房屋420内等待的第二乘客。因此,对于各图4A-4C的示例性图示400A-400C选定位置410可称为选定的下车及上车位置410。如图4A所描绘的,自动驾驶交通工具300正沿着第一街道40l朝选定的下车及上车位置410行驶。第一街道40l在配备有交通信号灯406的交叉口404处穿过第二街道402。另一交通工具408停在第二街道402的交通信号灯406处。选定的下车位置410位于房屋420前面,房屋420可以被指示为第一乘客的目的地。也就是说,一旦自动驾驶交通工具300停在下车位置410,第一乘客预计将离开自动驾驶交通工具300并沿着路径422步行到房屋420,而第二乘客预计将沿着路径422从房屋420步行到上车位置410,随后进入自动驾驶交通工具300。
在一些实现中,自动驾驶交通工具300可为第一乘客确定自动驾驶交通工具300的预期离开点。自动驾驶交通工具300可为第二乘客确定自动驾驶交通工具的预期进入点。自动驾驶交通工具300还可确定第一乘客的落座位置(以及其他乘客的落座位置,如有)。自动驾驶交通工具300可确定对于第一乘客的预期离开点的相对位置和/或第一乘客的落座位置。
图4B示出了描绘了自动驾驶交通工具300沿着街道401向选定的下车及上车位置410行驶的图示400B。具体地说,当自动驾驶交通工具300进入选定的下车及上车位置410周围的区域412的一定距离内时,自动驾驶交通工具300检测区域412内的垃圾堆430及施工屏障435。区域412可以具有任何合适的直径或其他尺寸。对于不同的下车及上车位置,区域412可以具有不同的尺寸。在一些实例中,距离可对应于自动驾驶交通工具300的一个或多个外部传感器372的扫描范围(诸如LIDAR传感器的扫描范围)。垃圾堆430及施工屏障435仅为示例性的,并因此仅为可由自动驾驶交通工具300检测到的许多可能的障碍物及危险状况中的两个。
自动驾驶交通工具300可使用任何合适的传感器或设备,结合任何合适的目标检测机制来检测垃圾堆430及施工屏障435的存在并确定其位置。在一些实现中,自动驾驶交通工具300可扫描周围环境中的目标或表面(例如,使用LIDAR传感器、IR传感器、RF传感器、mmW频率传感器、SONAR、相机,或其任意组合)。自动驾驶交通工具可以生成与垃圾堆430及施工屏障435的位置相对应的三维点图。所得的三维点图或“点云”可用于确定垃圾堆的430及施工屏障435的精确位置。
以图4B为例,垃圾堆430直接位于选定的下车及上车位置410及房屋420之间的路径422上,且妨碍了第一乘客安全舒适地离开自动驾驶交通工具300并沿着路径422步行到房屋420的能力。垃圾堆430还可防止第二乘客沿着路径422安全舒适地从房屋420步行到选定的下车及上车位置410。
在一些实现中,自动驾驶交通工具300可确定保持选定的下车及上车位置410不变。在其他实现中,自动驾驶交通工具300可确定修改选定的下车及上车位置410。在特定实现中,自动驾驶交通工具300可以至少部分地基于第一乘客的预期交通工具离开点相对于垃圾堆430来修改用于让第一乘客下车的选定位置410。自动驾驶交通工具可至少部分地基于第二乘客的预期交通工具进入点相对于垃圾堆430来修改用于接载第二乘客的选定位置410(如果确定为不同于第一乘客下车的位置)。在一些实例中,当自动驾驶交通工具300的预期进入点及检测到的障碍物或危险状况位于自动驾驶交通工具300的不同侧时,自动驾驶交通工具300可以保持供乘客上车的选定位置410不变。当预期进入点及检测到的障碍物或危险状况位于自动驾驶交通工具300的同一侧时,自动驾驶交通工具300可以选择备用上车位置。类似地,当自动驾驶交通工具300的预期离开点及检测到的障碍物或危险状况位于自动驾驶交通工具300的不同侧时,自动驾驶交通工具300可以保持供乘客下车的选定位置410不变。当预期离开点及检测到的障碍物或危险状况位于自动驾驶交通工具300的同一侧时,自动驾驶交通工具300可以选择备用下车位置。在一些实例中,自动驾驶交通工具300也可以在选择备用下车位置时考虑第一乘客的身体障碍或限制。
附加地或替代地,自动驾驶交通工具300可以在确定是否修改或改变选定的位置410作为下车位置时考虑第一乘客(以及其他乘客,如果存在)的落座位置。对于图4B的示例,第一乘客坐在4号落座位置上,预计将在自动驾驶交通工具300的右侧下车。垃圾堆430及施工屏障435也位于自动驾驶交通工具300的右侧。响应于确定预期离开点及检测到的障碍物位于交通工具的同一侧,自动驾驶交通工具300可确定修改选定的下车位置并选择备用下车位置。类似地,响应于确定第二乘客的预期进入点及检测到的障碍物位于交通工具的同一侧,自动驾驶交通工具300可以修改选定的上车位置并选择备用上车位置。当运载多个乘客时,自动驾驶交通工具300可为不同乘客选择不同的备用下车位置,或可为多个乘客选择相同的备用下车位置。
图4C示出了描绘了自动驾驶交通工具300选择备用下车及上车位置440的图示400C。在一些实现中,备用下车及上车位置440可以从选定的下车及上车位置410一定距离内的多个不同备用下车或上车位置中选择。可基于地图数据、LIDAR传感器数据、周围区域的图像、周围区域的视频、RADAR传感器数据或乘客输入中的一者或多者来标识或确定多个不同的备用下车或上车位置。在一些实现中,自动驾驶交通工具300可以直接从在自动驾驶交通工具300上或内提供的传感器接收LIDAR传感器数据、RADAR传感器数据、周围区域的图像、周围区域的视频以及其他传感器数据。在其他实现中,自动驾驶交通工具300可以直接从其他源(诸如(但不限于)路侧单元、其他交通工具、用户装备、或其任意组合)接收LIDAR传感器数据、RADAR传感器数据、周围区域的图像、周围区域的视频及其他传感器数据。在一些其他实现中,自动驾驶交通工具300可以从服务器(或其他中介系统或服务)接收LIDAR传感器数据、RADAR传感器数据、周围区域的图像、周围区域的视频以及其他传感器数据,至少在一些情况下,服务器(或其他中介系统或服务)可以聚合传感器数据。在一些实例中,自动驾驶交通工具可至少部分地基于第一乘客的身体限制,或存在随同第一乘客旅行的婴儿、儿童安全座椅或儿童来选择不同的备用下车位置。在其他实现中,自动驾驶交通工具300可至少部分地基于第一乘客的一个或多个身体属性来确定所选择的下车及上车位置410不可行,并且可至少部分地基于第一乘客的一个或多个身体属性来标识一个或多个可行的备用下车位置。
例如,可在诸如触敏显示器之类的用户接口上向第一乘客显示数个不同的备用下车位置。第一乘客可选择或指示一个优选备用下车位置。自动驾驶交通工具300可确定操纵至由第一乘客选择的备用下车位置。在一些实例中,自动驾驶交通工具300可确定第一乘客忽略垃圾堆430或施工屏障435的意愿并为第一乘客保持选定的下车位置410不变。乘客的意愿可存储在乘客简档中,或可由第一乘客响应于检测到垃圾堆430或施工屏障435而提供。在一些其他实例中,自动驾驶交通工具300可提示相应的乘客指示当相应的乘客进入和/或离开自动驾驶交通工具300时由自动驾驶交通工具300检测到的一个或多个潜在危险状况是否为乘客所关心的。
通过允许自动驾驶交通工具300基于在选定的下车及上车位置410附近检测到的障碍物或危险状况来动态改变乘客下车及上车位置,自动驾驶交通工具300可确保乘客在进入和/或离开自动驾驶交通工具时不会受到障碍物或危险状况的阻碍或不便。以此方式,实现本文所公开技术主题的各个方面的自动驾驶交通工具可以比传统自动驾驶交通工具以更安全及更方便的方式接载及放下乘客。
图5A-5C示出了相应的图示500A–500C描绘了根据各种实现的诸如自动驾驶交通工具之类的交通工具放下及接载乘客。对于参考图5A-5C讨论的示例操作,自动驾驶交通工具300被调度成在选定位置510放下乘坐自动驾驶交通工具300的第一乘客,并在选定位置510接载在房屋520内等待的第二乘客。因此,选定的位置510可称为选定的下车及上车位置510。在其他示例中,下车位置可能与上车位置不同。如图5A所描绘的,自动驾驶交通工具300沿着街道501向交叉口504行驶,并且选定的下车及上车位置510位于房屋520前面,房屋520可以是第一乘客的目的地。也就是说,一旦自动驾驶交通工具300停在下车位置510,第一乘客预计将离开自动驾驶交通工具300并沿着路径522步行到房屋520,而第二乘客预计将沿着路径522从房屋520步行到上车位置510并然后进入自动驾驶交通工具300。
图5A还示出了第一车531、第二车532及第三车533停在街道501的右侧。具体地说,第一车531停在选定的下车及上车位置510之前,而第二车532停在选定的下车及上车位置510之后。第三车533停在远离第二车532的地方。第一车531及第二车532分别停放在离选定的下车及上车位置510足够近的地方,这可能导致选定的下车及上车位置510对于需要额外空间或时间进出自动驾驶交通工具300的乘客不可行。在各种实现中,自动驾驶交通工具可与通信网络(诸如但不限于LTE通信网络、5G NR通信网络、无线局域网(WLAN)、城域网(MAN)、广域网(WAN)、个人局域网(PAN)、网状网络、因特网等)中的边缘服务器或其他服务器通信,并接收指示其他交通工具的位置、能力、配置、可用性和各种特征的信息,这些交通工具在自动驾驶交通工具要到达或离开确定的上车和/或下车位置时,预计将在确定的上车和/或下车位置或附近。在一示例实现中,自动驾驶交通工具可以基于乘客的调度、乘客的身体状况、乘客进入/离开自动驾驶交通工具的时间及空间要求、乘客下车及上车地点或附近存在障碍物或危险状况、交通状况、天气状况,或其任意组合来与一辆或多辆其他交通工具协调乘客上车和/或乘客下车。在一些方面中,当自动驾驶交通工具位于相应的上车和/或下车位置或附近(或接近相应的上车和/或下车位置)时,自动驾驶交通工具可与其他交通工具通信(例如,通过PC5链路)以请求临时进入由其他交通工具之一占有的停车位。响应于请求,其他交通工具可调整其姿势及位置,或可暂时离开停车点,以允许自动驾驶交通工具临时使用停车点供乘客下车和/或上车。
在一些实例中,自动驾驶交通工具300可标识第一乘客的身体残疾或限制。自动驾驶交通工具300可至少部分地基于所标识的身体障碍或身体限制以及选定的下车及上车位置510的一个或多个属性来确定第一乘客是否需要额外的时间或空间来离开自动驾驶交通工具300。选定的下车及上车位置510的一个或多个属性可包括(但不限于)水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物(例如消防栓、墙壁、树木等)、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道,或在自动驾驶交通工具300前方或后方的小于一定量的空间中的一者或多者。
在一些实现中,自动驾驶交通工具300还可确定在自动驾驶交通工具300中乘坐(或将被搭载)的每个乘客是否伴随有婴儿、儿童安全座椅或小孩,和/或是否携带大量行李、货物、或需要额外时间和/或空间进入或离开自动驾驶交通工具的装备旅行。在一些方面,被认为需要额外时间和/或空间的行李、货物或装备的数量可以基于行李、货物或装备的总重量,行李、货物或装备的总尺寸或体积,乘客的身体属性,表明乘客在自动驾驶交通工具中一次或多次先前乘坐所需的时间和/或空间的历史数据,或其任意组合。自动驾驶交通工具300可确定每个乘客在乘客上车装载期间及乘客下车卸除期间是否需要额外的时间和/或空间。例如,与未携带任何此类装备的其他乘客相比,携带滑雪板、滑雪杆及露营装备旅行的乘客在自动驾驶交通工具300前面装载及卸除滑雪板、滑雪杆及露营装备将需要更多的时间及空间。另一示例,与未与儿童一起旅行的其他乘客相比,与婴儿一起旅行的乘客在自动驾驶交通工具300的一侧需要更多的时间及空间来装载及卸除婴儿及儿童安全座椅。因此,在一些情况下,自动驾驶交通工具300在确定是否保持选定的下车及上车位置510不变或确定一个或多个可行的备用上车及下车位置时可以考虑由相应的乘客所需要的额外的时间和/或空间。额外的空间可对应于靠近自动驾驶交通工具300前端的第一区域、靠近自动驾驶交通工具300后端的第二区域、靠近自动驾驶交通工具300乘客侧的第三区域或靠近自动驾驶交通工具300驾驶员侧的第四区域中的一者或多者。
在一些情况下,自动驾驶交通工具300在确定相应的乘客、在上车位置进入自动驾驶交通工具300以及在下车位置离开自动驾驶交通工具300时是否需要额外的时间或空间时,也可以考虑选定的下车及上车位置510的一个或多个属性。例如,如果自动驾驶交通工具300将在选定的下车及上车位置510停下或停车时靠近自动驾驶交通工具300的前部、后部或离开侧的区域小于某个值,则自动驾驶交通工具300可确定相应的乘客所需的时间和/或空间大于选定的下车及上车位置510处的可用时间和/或空间。
图5B示出了描绘了自动驾驶交通工具300沿着街道501向选定的下车及上车位置510行驶的图示500B。由于自动驾驶交通工具300位于选定的下车及上车位置510的特定范围内,自动驾驶交通工具300可确定第一乘客需要比选定的下车位置510允许的更多的空间和/或时间以离开自动驾驶交通工具300。自动驾驶交通工具300可以修改为第一乘客选定的下车位置510。类似地,自动驾驶交通工具300可确定第二乘客需要比选定的上车位置510允许的更多的空间和/或时间进入自动驾驶交通工具300。基于该确定,自动驾驶交通工具300可以修改为第二乘客选定的上车位置510。自动驾驶交通工具300可响应于确定第一及第二乘客需要额外的时间和/或空间来选择备用下车或上车位置540。
图5C示出了描绘了自动驾驶交通工具300选择备用下车及上车位置540的图示500C。备用位置540大约位于房屋520及交叉点504之间的中间。对于其中房屋520为第一乘客的目的地的情况,可预期第一乘客在备用位置540处离开自动驾驶交通工具300并沿着路径543步行到房屋520。类似地,对于其中房屋520为第二乘客的始发地的情况,第二乘客可预期沿着路径543从房屋520步行到备用上车位置540。在一些实现中,备用下车及上车位置540可以从选定的下车及上车位置510一定距离内的多个不同备用下车或上车位置中选择。可基于(但不限于)地图数据、LIDAR传感器数据、周围区域的图像、周围区域的视频、RADAR或乘客输入中的一者或多者来标识或确定多个不同的备用下车或上车位置。在一些实例中,自动驾驶交通工具300可至少部分地基于第一乘客的身体限制,或存在随同第一乘客旅行的婴儿、儿童安全座椅或儿童来选择不同的备用下车位置。在其他实现中,自动驾驶交通工具300可至少部分地基于第一乘客的一个或多个身体属性来确定选定的下车及上车位置510不可行。自动驾驶交通工具300可至少部分地基于第一乘客的一个或多个身体属性来标识一个或多个可行的备用下车位置。
对于图5C的示例,自动驾驶交通工具300可确定第二车532及自动驾驶交通工具300后端之间的第一距离541为出发乘客从自动驾驶交通工具300的行李箱取回行李及其他物品提供了足够的空间和/或时间。自动驾驶交通工具300还可确定第一距离541为启程乘客将行李及其他物品装载在自动驾驶交通工具300的行李箱中提供了足够的空间和/或时间。类似地,自动驾驶交通工具300可确定第三车533与自动驾驶交通工具300前端之间的第二距离542为出发乘客取回安装在自动驾驶交通工具300前部机架上的装备及物品(诸如自行车及滑雪板)提供了足够的空间和/或时间。自动驾驶交通工具300还可确定第二距离542为启程乘客装载安装在自动驾驶交通工具300前面的机架上的装备及物品(例如自行车及滑雪板)提供了足够的空间和/或时间。在一些实现中,自动驾驶交通工具300还可以沿预期路径543估计或以其他方式确定备用位置540及房屋520之间的距离。在一些实例中,自动驾驶交通工具300可以通知第一乘客沿路径543到房屋520的估计距离。在一些其他实例中,自动驾驶交通工具300还可以通知第二乘客沿路径543从房屋520到备用上车位置540的估计距离。
例如,可在诸如触敏显示器之类的用户接口上向第一乘客显示一些或所有不同的备用下车位置。第一乘客可选择或指示一个优选备用下车位置。自动驾驶交通工具300可行驶到由第一乘客选定的备用下车位置。
通过允许交通工具(如自动驾驶交通工具)基于身体限制和/或一个或多个乘客是否需要额外的时间或空间进入或离开交通工具来动态改变乘客下车及上车位置,交通工具可确保需要额外时间或空间的乘客在为乘客进出交通工具提供额外空间和/或时间的位置被接载及放下。以此方式,实现本文所公开技术主题的各个方面的交通工具可以比传统交通工具以更安全及更方便的方式接载及放下乘客。
在一些其他实现中,自动驾驶交通工具300可确定在靠近经调度的下车或上车位置但并非指定用于停车或乘客下车或上车的区域放下和/或接载乘客。例如,当城市环境中的经调度的下车或上车位置不可用时(例如,因为其他交通工具停在经调度的下车或上车位置),自动驾驶交通工具300可确定临时并排停车为乘客安全进入和/或离开自动驾驶交通工具300提供了足够的时间及空间,且对交通等的影响最小,并且也相对靠近经调度的下车或上车位置(例如在经调度的下车或上车位置的一定距离内)。另一示例,当郊区中的经调度的下车或上车位置不可接近(例如,被其他交通工具阻挡)时,自动驾驶交通工具300可确定在相邻车道上停车为乘客进入和/或离开自动驾驶交通工具300提供足够的时间及空间,并且也相对靠近经调度的下车或上车位置(诸如在经调度的下车或上车位置的一定距离内)。
图6A示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作600的流程图。操作600可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在框602,装置可确定交通工具的乘客的预期进入点或离开点。在框604,该装置可检测现场或现场附近是否存在障碍物或危险状况。在框606,该装置包括响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置。
该检测到的障碍物或危险状况可包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物(例如,消防栓、墙壁、树木等)、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、该交通工具前方或后方的小于一定量的空间、或其任意组合。在一些实现中,交通工具可能会使用对雪丘或雪堆的检测作为雪下被遮挡障碍物的指示器。在一些方面,交通工具可能会绕过或以其他方式避免检测到的雪丘或雪堆。
在一些实例中,还可基于该交通工具的该乘客的该预期进入点或离开点及该检测到的障碍物或危险状况是否在该交通工具的同一侧来确定该下车或上车位置。例如,当检测到的障碍物或危险状况以及交通工具相应的乘客的预期交通工具进入点或离开点位于交通工具的同一侧时,装置可确定相应的乘客的备用下车或上车位置。交通工具可在备用下车或上车位置让相应的乘客下车或上车。相反,当检测到的障碍物或危险状况及对于交通工具相应的乘客的预期进入点或离开点位于交通工具的不同侧时,装置可保持相应的乘客的经确定的下车或上车位置不变。交通工具可在原始下车或上车位置让相应的乘客下车或上车。
可从该经确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。在一些情况下,距离可为任何适当的阈值距离,该距离足够长以确保乘客进出交通工具的路径不会被检测到的障碍物堵塞或变得不安全。距离也可能足够短以避免或至少减少对乘客的不便。在一个示例实现中,可以基于地图数据、LIDAR传感器数据、周围区域的图像、周围区域的视频、RADAR、乘客输入、或其任意组合来确定多个备用下车或上车位置。
在一些实现中,可至少部分地基于与乘客相关联的一个或多个状况来确定备用下车或上车位置。在一些实例中,可至少部分地基于乘客的身体残疾或限制(可被视为乘客的首要状况)来确定备用下车或上车位置。例如,如果乘客行走困难或坐在轮椅上,则交通工具可确定更靠近已标识的下车或上车位置的备用下车或上车位置,可确定提供轮椅通道的备用下车或上车位置,等等。在其他实例中,可至少部分地基于存在婴儿或儿童随同乘客(其可被视为乘客的第二种状况)来确定备用下车或上车位置。例如,如果乘客带着婴儿旅行,则交通工具可确定更靠近已标识的下车或上车位置的备用下车或上车位置,可确定配备有尿布更换站的备用下车或上车位置,等等。在一些其他实例中,可至少部分地基于乘客是否携带相对大量的行李、货物或装备(其可被视为乘客的第三种状况)来确定备用下车或上车位置。例如,如果乘客携带相对大量的行李,则交通工具可能会确定备用下车或上车位置以便为乘客提供更多的空间来装载或卸除行李和/或为乘客提供更多的时间来装载或卸除行李。在一些其他实例中,可至少部分地基于乘客的年龄来确定备用下车或上车位置。例如,如果乘客为儿童(例如,小于13岁),则交通工具可能会确定为成年人提供空间帮助儿童下车的备用下车或上车位置。
图6B示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作610的流程图。操作610可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图6A的框606中确定下车或上车位置之后执行操作610。例如,在框612,响应于确定乘客的预期进入点或离开点及检测到的障碍物或危险状况位于交通工具的不同侧,装置可以保持经确定的下车或上车位置不变。
图7A示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作700的流程图。操作700可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图6A的框606中确定乘客下车或上车位置之后执行操作700。例如,在框702,装置可从该经确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。以此方式,交通工具可确保检测到的障碍物或危险状况不会阻碍乘客进出交通工具的路径,同时还可确保备用下车或上车位置在原始下车或上车位置的一定距离内。
图7B示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作710的流程图。操作710可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,操作710可以与在图7A的框702中确定备用下车或上车位置同时执行。在其他实现中,可以在图7A的框710中确定备用下车或上车位置之后执行操作702。例如,在框712,装置可从多个不同的备用下车或上车位置接收一个或多个优选下车或上车位置。在框714,该装置可基于该一个或多个优选下车或上车位置来确定该备用下车或上车位置。
在一些实例中,交通工具可能会在乘客可以看到的触敏显示器上显示一些备用下车或上车位置。乘客可与触敏显示器互动以确定备用下车或上车位置中的一者。例如,备用下车或上车位置可以在触敏显示器上显示为可选择的图标。乘客可通过触摸、轻触或以其他方式与对应于特定备用下车或上车位置的可选择的图标互动来选择特定备用下车或上车位置。在一些实例中,触敏显示器可为与乘客相关联的移动计算设备的触敏显示屏。在一些其他实例中,可在交通工具内部提供触敏显示器,并将其配置成可供交通工具运送的乘客查看。交通工具可确定由乘客指示的备用下车或上车位置。交通工具可行驶至乘客标识的选定备用下车或上车位置。在一些其他实例中,交通工具可能会在乘客用户设备的触敏显示器上显示一些备用下车或上车位置。乘客可与用户设备互动以确定备用下车或上车位置中的一者。
图8A示出描述了根据一些实现的用于确定备用下车位置的示例操作800的流程图。操作800可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图6A的框606中确定备用下车或上车位置之后执行操作800。例如,在框802,装置可至少部分地基于该乘客的一个或多个身体属性来确定一个或多个备用下车位置。
图8B示出描述了根据一些实现的用于确定备用下车位置之一的示例操作810的流程图。操作810可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图8A的框802中确定一个或多个备用下车位置之后执行操作810。例如,在框812,装置可确定来自该乘客的备用下车位置中的一者。在框814,装置可导致交通工具在经确定的备用下车位置放下乘客。
在一示例实现中,备用下车或上车位置可以在触敏显示器上显示为可选择的图标。乘客可通过触摸、轻触或以其他方式与对应于特定备用下车或上车位置的可选择的图标互动来选择特定备用下车或上车位置。在一些实例中,触敏显示器可为与乘客相关联的移动计算设备的触敏显示屏。在一些其他实例中,可在交通工具内部提供触敏显示器,并将其配置成可供交通工具运送的乘客查看。
图9示出描述了根据一些实现的用于确定乘客下车或上车位置的示例操作900的流程图。操作900可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可结合在图8B的框812中确定备用下车位置之一来执行操作900。例如,在框902,装置可接收该乘客愿意忽略该检测到的障碍物或危险状况的指示。在框904,该装置可响应于收到该乘客愿意忽略该检测到的障碍物或危险状况的该指示而保持该经确定的下车或上车位置不变。在一些实例中,乘客忽略某些障碍物或危险状况的意愿可以存储在乘客简档中。在一些其他实例中,可以从乘客接收乘客忽略某些障碍物或危险状况的意愿。
图10示出了描述了根据一些实现的用于确定障碍物或危险状况位置的示例操作1000的流程图。操作1000可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,操作1000可以是在图6A的框604中检测现场或现场附近是否存在障碍物或危险状况的一示例。例如,在框1002,装置可接收指示周围环境中存在目标的一个或多个传感器测量。在框1004,该装置可生成与该检测到的目标的位置相对应的三维点图。在框1006,该装置可至少部分地基于该三维点图来确定该周围区域中该障碍物或危险状况的位置。
图11示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作1100的流程图。操作1100可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图6A的框610中确定下车位置之后执行操作1100。例如,在框1102,装置可确定该交通工具中该乘客的落座位置。在框1104,该装置可基于乘客的落座位置相对于该交通工具的该乘客的该预期进入点或离开点来确定一个或多个备用下车位置。
图12示出描述了根据一些其他实现的用于确定备用下车位置的示例操作1200的流程图。操作1200可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图6A的框606中确定下车或取车位置之后执行操作1200。例如,在框1202,装置可至少部分地基于该经确定的下车或上车位置的一个或多个属性、该乘客的一个或多个属性、该乘客的一个或多个身体限制或障碍、或其任意组合来确定该乘客是否需要额外的时间或空间进入或离开该交通工具。在框1204,该装置可响应于确定该乘客需要额外的时间或空间来进入或离开该交通工具来确定一个或多个备用下车或上车位置。
图13示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作1300的流程图。操作1300可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在框1302,该装置可确定交通工具的乘客的下车或上车位置。在框1304,该装置可至少部分地基于该经确定的下车或上车位置的一个或多个属性、该乘客的一个或多个属性、该乘客的一个或多个身体限制或障碍、或其任意组合来确定该乘客是否需要额外的时间或空间进入或离开该交通工具。在框1306,该装置可响应于确定该乘客需要额外的时间或空间来进入或离开该交通工具来确定一个或多个备用下车或上车位置。
经确定的下车或上车位置的一个或多个属性可能包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物(如消防栓、墙壁、树木等)、天气状况、消防线、禁止停车区、或在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
在一些实现中,确定乘客需要额外的时间和/或空间进入或离开交通工具也可以基于交通工具中超过配置值的乘客数量。在其他实现中,确定乘客需要额外的时间和/或空间进入或离开交通工具也可以基于交通工具行李箱中是否存在或预期存在货物、安装在交通工具上的装备架(例如自行车架、行李架、滑雪架等)、随同乘客的婴儿或儿童的存在或预期存在、交通工具中儿童安全座椅的存在或预期存在、或其任意组合。
在一些实现中,交通工具可使用一个或多个传感器372及376来检测乘客的一个或多个身体限制或障碍。在其他实现中,乘客可将乘客的一个或多个身体限制或障碍通知交通工具(或交通工具控制器)。在一些实例中,乘客可能会在乘客简档中指示一个或多个身体限制或障碍。交通工具可通过访问乘客简档来检索乘客的一个或多个身体限制或障碍。在其他实例中,乘客可以使用移动计算设备向交通工具发送一个或多个身体限制或障碍的通知。
在各种实现中,该额外的空间可以是靠近该交通工具后端的第一区域、靠近该交通工具前端的第二区域、靠近该交通工具的乘客侧的第三区域、靠近该交通工具的驾驶员侧的第四区域、或其任意组合。
图14示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作1400的流程图。操作1400可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在框1402,该装置可确定乘客下车或上车的位置。在一些实例中,交通工具可能正在运送一个或多个乘客到经确定的位置。在此类示例中,交通工具可以在经确定的位置放下一个或多个乘客。在各种实现中,交通工具可连续或周期性地接收指示周围环境中存在目标或危险状况的一个或多个传感器测量。如果在所确定位置的某个区域内检测到障碍物或危险状况,交通工具可以确定备用下车位置,例如,如分别参考图6、7A、7B、8A、8B、9、10、11、12、13的操作600、700、710、800、810、900、1000、1100、1200或1300中的一者或多者所描述的。
在框1404,装置可导致交通工具停在经确定的位置或附近。在一些实例中,交通工具可能能够在经确定的位置临时停车(例如,一段有限的时间)。例如,在交通工具在经确定位置放下一个或多个乘客的实例中,交通工具可在经确定位置检测到可用停车位。当然,当没有将乘客运送到经确定的位置时,交通工具也可能检测到可用的停车位。在任何一种场景下,交通工具都可能停在经确定位置的可用空间内。在其他实例中,例如,当经确定位置没有可用停车位时(或当在经确定位置检测到障碍物或危险状况时),交通工具可停在靠近经确定位置的备用位置(例如,在经确定位置的特定距离内)。在一些其他实例中,例如,当在所确定位置的特定距离内的任何备用位置处没有可用停车位时,交通工具可继续围绕所确定位置的区域行驶。
在框1406,装置可导致交通工具等待一个或多个乘客在经确定的位置或附近上车。在框1408,该装置可接收指示周围环境中存在目标或危险状况的一个或多个传感器测量。例如,当交通工具停在经确定位置时,交通工具可监控经确定位置周围的特定区域是否存在障碍物或危险状况,可接收存在目标或危险状况或其任意组合的指示。如果装置未检测到任何障碍物或危险状况,则在框1410,装置可继续在框1408处监测周围环境。
然而,如果装置在框1410处检测到周围环境中存在障碍物或危险状况(例如,当交通工具在经确定位置或备用位置等待接载一个或多个乘客时),则在框1412,装置还可确定所检测到的障碍物或危险状况是否可被相应的乘客忽略。如果检测到的障碍物或危险状况可以被相应的乘客忽略,该装置可以继续在框1408确定是否存在其他障碍物或危险状况。例如,如果装置在交通工具停在备用位置时检测到水坑,并将在经确定的位置接载一个或多个乘客,则装置可以忽略水坑(例如,因为水坑不会阻碍乘客的路径)。
相反,如果在框1412,相应的乘客无法忽略检测到的障碍物或危险状况,则在框1414,装置确定新的上车位置。例如,如果装置在交通工具停在经确定位置时检测到不平的人行道,并且将在经确定位置搭载一个或多个乘客,则装置可能不会忽略不平的人行道(例如,因为不平的人行道会阻碍乘客到达交通工具的路径)。对新位置的确定以及各种乘客属性、状况和/或偏好之考虑可包括上述任何数量的操作。
该检测到的障碍物或危险状况可包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物(例如,消防栓、墙壁、树木等)、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、该交通工具前方或后方的小于一定量的空间或任何其他阻碍乘客进入或离开交通工具的障碍物或状况。在一些实现中,备用下车或上车位置的选择可能基于交通工具的乘客的预期进入点或离开点、相对于交通工具的乘客的预期进入点或离开点的乘客的落座位置、乘客的身体残疾或限制、或其任意组合。
在一些实现中,装置可向乘客发送检测到的障碍物或危险状况的通知。通知可以是任何合适的通知,包括(但不限于)可以发送到乘客的移动计算设备的推送通知、文本消息、电子邮件、自动语音呼叫等。在一些其他实现中,交通工具可能会响应于检测到障碍物或危险状况的存在而行驶到备用下车或上车位置。
图15示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作1500的流程图。操作1500可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在框1502,该装置可确定交通工具的乘客的下车或上车位置。在框1504,当交通工具在离下车或上车位置一定距离内时,装置可检测下车或上车位置区域内是否存在障碍物或危险状况。在框1506,该装置可基于该区域内存在障碍物或危险状况来确定备用下车或上车位置。
图16示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作1600的流程图。操作1600可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图15的框1502中确定下车或取车位置之后执行操作1600。例如,在框1602,交通工具可行驶以将乘客送到该备用下车或上车位置。
图17示出描述了根据一些其他实现的用于确定乘客下车或上车位置的示例操作1700的流程图。操作1700可由诸如(但不限于)图3的交通工具控制器310之类的装置与诸如(但不限于)图3的自动驾驶交通工具300之类的交通工具一起执行。在一些实例中,装置可在交通工具内实现。在其他实例中,装置可位于交通工具外部。在一些其他方面,该装置可以是交通工具(或交通工具的至少一部分)。在一些实现中,可以在图15的框1502中确定下车或取车位置之后执行操作1700。例如,在框1702,装置可接收该下车或上车位置对该乘客不可行或不方便的指示。该装置可至少部分地基于接收到的指示来确定备用下车或上车位置。
在以下经编号条款中描述了各实现示例:
1.一种装置,包括:
存储器;以及
可通信地耦合到存储器的一个或多个处理器,一个或多个处理器被配置成:
确定交通工具的乘客的预期进入点或离开点;
检测现场或现场附近是否存在障碍物或危险状况;以及
响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置。
2.如条款1所述的装置,其中检测到的障碍物或危险状况包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
3.如条款1-2中任一项所述的装置,其中确定下车或上车位置是进一步基于乘客的落座位置的。
4.如条款1-3中任一项所述的装置,其中基于交通工具的乘客的预期进入点或离开点及检测到的障碍物或危险状况是否在交通工具的同一侧来确定下车或上车位置。
5.如条款1-4中任一项所述的装置,其中一个或多个处理器被进一步配置成:
从经确定的下车或上车位置的一定距离内的多个不同的备用下车或上车位置中确定备用下车或上车位置。
6.如条款5所述的装置,其中多个不同的备用下车或上车位置是基于地图数据、相干光感测系统数据、周围区域的图像、周围区域的视频、雷达、乘客输入、或其任意组合的。
7.如条款5所述的装置,其中多个不同的备用下车或上车位置是至少部分地基于乘客的身体限制、乘客的年龄、存在婴儿或儿童随同乘客、或其任意组合的。
8.如条款5所述的装置,其中一个或多个处理器被进一步配置成:
接收多个不同的备用下车或上车位置中的一个或多个优选下车或上车位置;以及
基于一个或多个优选下车或上车位置来确定备用下车或上车位置。
9.如条款1-8中任一项所述的装置,其中一个或多个处理器被进一步配置成:
至少部分地基于乘客的一个或多个身体属性来确定一个或多个备用下车位置。
10.如条款9所述的装置,其中一个或多个处理器被进一步配置成:
从乘客处获得备用下车位置中的一个。
11.如条款1-10中任一项所述的装置,进一步包括在交通工具内实现的交通工具控制器。
12.如条款1-10中任一项所述的装置,进一步包括在服务器或基于云的交通工具控制系统中实现的交通工具控制器。
13.如条款1-12中任一项所述的装置,其中一个或多个处理器被进一步配置成:
接收乘客愿意忽略检测到的障碍物或危险状况的指示;以及
响应于收到乘客愿意忽略检测到的障碍物或危险状况的指示而保持经确定的下车或上车位置不变。
14.如条款1-14中任一项所述的装置,其中检测障碍物或危险状况包括:
接收指示周围环境中存在目标的一个或多个传感器测量;
生成与检测到的目标的位置相对应的三维点图;以及
基于三维点图来确定周围区域中障碍物或危险状况的位置。
15.如条款1-14中任一项所述的装置,其中一个或多个处理器被进一步配置成:
确定交通工具中乘客的落座位置;以及
基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置。
16.如条款15所述的装置,其中一个或多个备用下车位置的确定是基于确定乘客的落座位置及预期进入点或离开点位于交通工具的同一侧,而不考虑交通工具中一个或多个其他乘客的落座位置。
17.如条款1-16中任一项所述的装置,其中一个或多个处理器被进一步配置成:
至少部分地基于经确定的下车或上车位置的一个或多个属性、乘客的一个或多个属性、乘客的一个或多个身体限制或障碍、或其任意组合来确定乘客是否需要额外的时间或空间进入或离开交通工具;以及
响应于确定乘客需要额外的时间或空间来进入或离开交通工具来确定一个或多个备用下车或上车位置。
18.一种用于控制交通工具的一个或多个操作的方法,包括:
确定交通工具的乘客的预期进入点或离开点;
检测现场或现场附近是否存在障碍物或危险状况;以及
响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置。
19.如条款18所述的方法,其中检测到的障碍物或危险状况包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
20.如条款18-19中任一项所述的方法,其中确定下车或上车位置是基于乘客的落座位置的。
21.如条款18-20中任一项所述的方法,其中基于交通工具的乘客的预期进入点或离开点及检测到的障碍物或危险状况是否在交通工具的同一侧来确定下车或上车位置。
22.如条款22所述的方法,进一步包括:
从多个不同的备用下车或上车位置接收一个或多个优选下车或上车位置;以及
基于一个或多个优选下车或上车位置来确定备用下车或上车位置。
23.如条款18-21中任一项所述的方法,进一步包括:
至少部分地基于乘客的一个或多个身体属性来确定一个或多个备用下车位置。
24.如条款18-21中任一项所述的方法,进一步包括:
确定交通工具中乘客的落座位置;以及
基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置。
25.一种系统,包括:
用于确定交通工具的乘客的预期进入点或离开点的装置;
用于检测现场或现场附近是否存在障碍物或危险状况的装置;以及
用于响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置的装置。
26.如条款25所述的系统,进一步包括:
用于至少部分地基于乘客的一个或多个身体属性来确定一个或多个备用下车位置的装置。
27.如条款25-26中任一项所述的系统,进一步包括:
用于确定交通工具中乘客的落座位置的装置;以及
用于基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置的装置。
28.一种存储用于控制交通工具的指令的非瞬态计算机可读介质,其中由装置的一个或多个处理器执行指令导致交通工具执行包括以下内容的操作:
确定交通工具的乘客的预期进入点或离开点;
检测现场或现场附近是否存在障碍物或危险状况;以及
响应于检测到现场或现场附近存在障碍物或危险状况,至少部分地基于交通工具的乘客的预期进入点或离开点的位置以及检测到的障碍物或危险状况来确定与现场相关联的下车或上车位置。
29.如条款28所述的非瞬态计算机可读介质,其中由一个或多个处理器执行指令导致交通工具执行进一步包括以下内容的操作:
至少部分地基于乘客的一个或多个身体属性来确定一个或多个备用下车位置。
30.如条款28-29中任一项所述的非瞬态计算机可读介质,其中由一个或多个处理器执行指令导致交通工具执行进一步包括以下内容的操作:
确定交通工具中乘客的落座位置;以及
基于乘客的落座位置相对于交通工具的乘客的预期进入点或离开点来确定一个或多个备用下车位置。
31.一种装置,包括:
存储器;以及
可通信地耦合到存储器的一个或多个处理器,一个或多个处理器被配置成:
确定交通工具的乘客的下车或上车位置;
至少部分地基于经确定的下车或上车位置的一个或多个属性、乘客的一个或多个身体属性、乘客的一个或多个身体限制或障碍、或其任意组合来确定乘客是否需要额外的时间或空间进入或离开交通工具;以及
响应于确定乘客需要额外的时间或空间来进入或离开交通工具来确定一个或多个备用下车或上车位置。
32.如条款31所述的装置,其中经确定的下车或上车位置的一个或多个属性包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
33.如条款31-32中任一项所述的装置,其中确定乘客是否需要额外的时间或空间进入或离开交通工具进一步基于交通工具的后备箱中是否存在或预期存在货物、安装在交通工具上的装备机架、存在婴儿或儿童随同乘客旅行或预期存在、交通工具中儿童安全座椅的存在或预期存在、或其任意组合。
34.如条款31-33中任一项所述的装置,其中空间包括靠近交通工具后端的第一区域、靠近交通工具前端的第二区域、靠近交通工具的乘客侧的第三区域、靠近交通工具的驾驶员侧的第四区域、或其任意组合。
35.如条款31-34中任一项所述的装置,其中备用下车或上车位置由经确定的下车或上车位置一定距离内的多个备用下车或上车位置来确定。
36.如条款31-35中任一项所述的装置,其中确定一个或多个备用下车或上车位置包括:
在可供乘客查看的显示屏上显示备用下车或上车位置;
从乘客处接收对所呈现的备用下车或上车位置中的一者的指示;以及
响应于所收到的指示来确定下车或上车位置。
37.如条款31-36中任一项所述的装置,其中确定至少一个乘客需要额外的时间或空间包括从与乘客相关联的移动计算设备接收指示。
38.一种装置,包括:
存储器;以及
可通信地耦合到存储器的一个或多个处理器,一个或多个处理器被配置成:
确定交通工具的乘客的乘客下车或上车位置;
将交通工具停放在经确定的位置或附近;
等待一个或多个乘客在经确定的位置或附近上车;
接收指示周围环境中存在目标的传感器测量值;以及
响应于周围环境中存在目标来确定新的乘客上车位置。
39.如条款38所述的装置,其中检测到的障碍物或危险状况包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间或其任意组合。
40.如条款38-39中任一项所述的装置,其中备用下车或上车位置的确定基于交通工具的乘客的预期进入点或离开点、相对于交通工具的乘客的预期进入点或离开点的乘客的落座位置、乘客的身体残疾或限制、或其任意组合。
41.如条款38-40中任一项所述的装置,其中备用下车或上车位置的确定基于乘客是否需要额外的时间或空间才能进入或离开交通工具。
42.如条款41所述的装置,其中额外的空间包括靠近交通工具后端的第一区域、靠近交通工具前端的第二区域、靠近交通工具的乘客侧的第三区域、靠近交通工具的驾驶员侧的第四区域、或其任意组合。
43.一种装置,包括:
存储器;以及
可通信地耦合到存储器的一个或多个处理器,一个或多个处理器被配置成:
确定交通工具的乘客的下车或上车位置;
当交通工具停在下车或上车位置时,检测下车或上车位置区域内是否存在障碍物或危险状况;以及
基于区域内存在障碍物或危险状况来确定备用下车或上车位置。
44.如条款43所述的装置,其中检测到的障碍物或危险状况包括水坑、冰块、坑洞、不平的人行道、高路沿、雨水沟、垃圾、施工屏障、其他交通工具、障碍物、天气状况、消防线、禁止停车区、在所标识的下车或上车位置附近的封闭车道、交通工具前方或后方的小于一定量的空间、或其任意组合。
45.如条款43-44中任一项所述的装置,其中备用下车或上车位置的确定基于交通工具的乘客的预期进入点或离开点、相对于交通工具的乘客的预期进入点或离开点的乘客的落座位置、乘客的身体残疾或限制、或其任意组合。
46.如条款43-45中任一项所述的装置,其中备用下车或上车位置的确定基于乘客是否需要额外的时间或空间才能进入或离开交通工具。
47.如条款43-46中任一项所述的装置,其中一个或多个处理器被进一步配置成:
行驶到备用下车或上车位置。
48.如条款47所述的装置,其中一个或多个处理器被进一步配置成:
接收备用下车或上车位置对乘客不可行或不方便的指示。
如本文中所使用的,引述一列项目“中的至少一者”的短语是指这些项目的任意组合,包括单个成员。作为示例,a,b,or c”is intended to cover:a、b、c、a-b、a-c、b-c以及a-b-c。
结合本文中所公开的实现来描述的各种解说性逻辑、逻辑块、模块、电路和算法过程可实现为电子硬件、计算机软件、或这两者的组合。硬件与软件的这种可互换性已以其功能性的形式作了一般化描述,并在上文描述的各种解说性组件、框、模块、电路和过程中作了解说。此类功能性是以硬件还是软件来实现取决于具体应用和加诸于整体系统的设计约束。
用于实现结合本文中所公开的方面来描述的各种解说性逻辑、逻辑块、模块和电路的硬件和数据处理装置可用设计成执行本文中描述的功能的通用单芯片或多芯片处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)或其他可编程逻辑器件、分立的门或晶体管逻辑、分立的硬件组件、或其任意组合来实现或执行。通用处理器可以是微处理器,或者是任何常规的处理器、控制器、微控制器、或状态机。处理器还可被实现为计算设备的组合(诸如DSP与微处理器的组合)、多个微处理器、与DSP核协作的一个或多个微处理器、或任何其他此类配置。在一些实现中,特定过程和方法可由专用于给定功能的电路系统来执行。
在一个或多个方面,所描述的功能可以在硬件、数字电子电路系统、计算机软件、固件(包括本说明书中所公开的结构及其结构等效物)中或在其任意组合中实现。本说明书中所描述的主题内容的实现也可实现为一个或多个计算机程序,即,编码在计算机存储介质上以供数据处理装置执行或用于控制数据处理装置的操作的计算机程序指令的一个或多个模块。
若在软件中实现,则各功能可以作为一条或多条指令或代码存储在计算机可读介质上或藉其进行传送。本文中所公开的方法或算法的过程可在可驻留在计算机可读介质上的处理器可执行软件模块中实现。计算机可读介质包括计算机存储介质和通信介质两者,包括可被实现成将计算机程序从一地转移到另一地的任何介质。存储介质可以是能被计算机访问的任何可用介质。作为示例而非限定,此类计算机可读介质可包括RAM、ROM、EEPROM、CD-ROM或其他光盘存储、磁盘存储或其他磁存储设备、或能被用来存储指令或数据结构形式的期望程序代码且能被计算机访问的任何其他介质。任何连接也可被恰当地称为计算机可读介质。如本文中所使用的盘(disk)和碟(disc)包括压缩碟(CD)、激光碟、光碟、数字多用碟(DVD)、软盘和蓝光碟,其中盘(disk)往往以磁的方式再现数据而碟(disc)用激光以光学方式再现数据。以上的组合应当也被包括在计算机可读介质的范围内。附加地,方法或算法的操作可作为代码和指令之一或者代码和指令的任意组合或集合而驻留在可被纳入计算机程序产品中的机器可读介质和计算机可读介质上。
对本公开中所描述的实现的各种改动对于本领域技术人员可能是明显的,并且本文中所定义的普适原理可应用于其他实现而不会脱离本公开的精神或范围。由此,权利要求并非旨在被限定于本文中示出的实现,而是应被授予与本公开、本文中所公开的原理和新颖性特征一致的最广范围。
- 一种带有末端精确定位乘客位置的打车系统
- 用于确定交通工具座椅在交通工具内部的位置的位置确定装置、系统、带有布置在交通工具内部的交通工具座椅的交通工具以及用于确定交通工具座椅位置的方法
- 用于移动具有行动障碍的乘客的系统以及在用于集体运输的车辆中使具有行动障碍的乘客上车和下车的方法