一种公交车车身高度主动控制装置及方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及公交车车身高度控制领域,具体涉及公交车车身高度主动控制装置及方法。
背景技术
为了方便上下客和乘客在车厢内行走,低地板及低入口城市客车每个乘客门踏步都是一级踏步的城市客车。而国标GB19260-2016《低地板及低入口城市客车结构要求》中规定车长大于9米的低地板城客车应配置空气悬架和车身升降系统,明确要求车长9米以上的低地板公交车使用空气弹簧悬架,且具备主动控制车身高度功能。
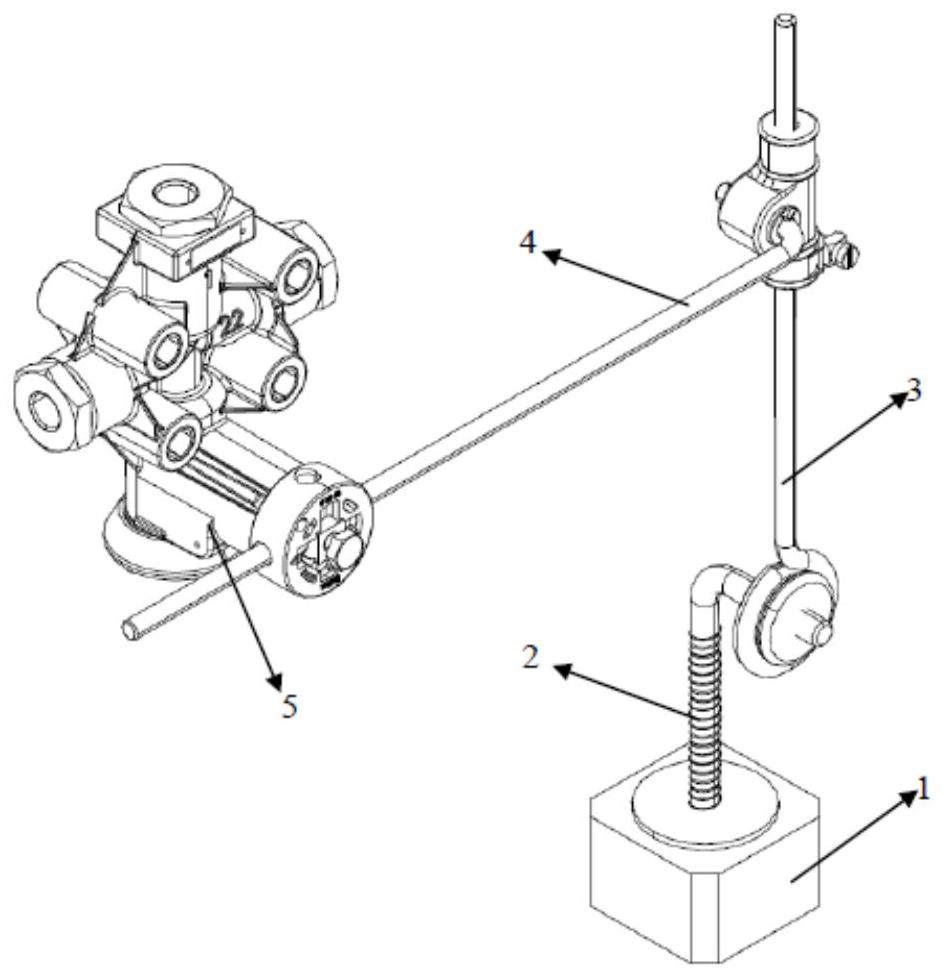
传统商用车空气悬架使用机械式高度阀控制空气弹簧充放气,保证空气弹簧刚度随荷载可进行自动调节,提升舒适性。如图1所示,其工作原理为,当荷重增加时,车体下降,空气弹簧6压缩,调整杆3被推向上方,控制杆4开始转动,高度阀5包括进气阀、排气阀,进气阀打开,高压气体由储气筒流向空气弹簧,增加空气弹簧6刚度,车体恢复到一定高度后,调整杆3返回到平衡位置,此时进气阀被关闭,压力空气关断。当荷重减少时,车体上升,空气弹簧6伸长,与荷重增加时情况相反,调整杆3被拉下,排气阀打开,高压气体排出到大气中,降低空气弹簧刚度,当车体恢复到一定高度后,调整杆3返回到平衡位置,此时排气阀被关闭,压力空气关断。以此来保证空气弹簧刚度随荷载可进行自动调节,但是不具备主动控制车身高度功能。
为满足法规(即前述国标)要求,使公交车具备主动控制车身高度功能,需将机械式高度阀更换为ECAS系统(电子控制空气悬挂系统),使用高度传感器和电磁阀代替机械阀调整杆、控制杆、机械转阀,通过中控系统控制电磁阀通断,从而实现主动控制车身高度功能,此类现有技术例如授权公告号CN111660749B的专利文献中公开的“一种空气悬架车身高度的控制方法”。但ECAS系统结构复杂,成本较高,相较于机械式高度阀单车增加成本可达3000元左右。
发明内容
本发明的目的是提供一种公交车车身高度主动控制装置,以解决现有技术更换ECAS系统存在的结构复杂、成本高的问题;同时,本发明的目的在于提供一种公交车车身高度主动控制方法,以解决现有技术更换ECAS系统存在的结构复杂、成本高的问题。
本发明的一种公交车车身高度主动控制装置,包括空气弹簧、调整杆和高度阀,高度阀是控制空气弹簧充放气的机械式高度阀,高度阀连接在车身上,高度阀连接有用于带动高度阀切换状态的控制杆,调整杆与控制杆铰接,还包括控制单元、连接在车底盘上的驱动机构,驱动机构具有输出上下往复直线运动的输出轴,输出轴上端与调整杆铰接,输出轴输出的直线运动通过调整杆、控制杆带动高度阀切换状态,控制高度阀实现充放气功能以调节车身高度;所述控制单元用于控制输出轴长度,输出轴长度是输出轴相对于驱动机构本体向上伸出的伸出长度,控制单元中储存有输出轴的设定长度与车身设计高度的对应关系,控制单元中还储存有通过控制输出轴长度至设定长度,将车身高度调整至与设定长度相应的设计高度的控制程序;所述输出轴的设定长度与车身的设计高度的对应关系是通过标定获得,测量车身高度、控制和测量输出轴长度:当车身高度位于初始设计高度时,记录此时输出轴长度为初始设定长度a0;当车身位于低于初始设计高度设定值的第一设计高度时,记录此时输出轴长度为第一设定长度a1;当车身位于高于初始设计高度设定值的第二设计高度时,记录此时输出轴长度为第二设定长度a2。
本发明提供的一种公交车车身高度主动控制装置,该装置在原有机械式高度阀的机械结构的基础上增加了驱动机构及控制单元,形成控制系统,将驱动机构的输出直线往复运动的输出轴与机械式高度阀的调整杆相连,使用输出轴来主动控制调整杆长度,这样即可以主动控制控制杆摆动角度,从而主动控制空气弹簧充放气,从而实现主动控制车身高度功能,结构简单,成本较低。
进一步的,所述驱动机构为步进直线电机,输出轴为螺杆。
进一步的,所述第一设计高度低于初始设计高度30mm,所述第二设计高度高于初始设计高度30mm。
进一步的,所述空气弹簧分为对应左右侧车身的左右两组,控制单元能够分别调整两侧的车身高度。
进一步的,所述控制单元通过控制输出轴长度至设定长度,将两侧的车身高度调整至与设定长度相应的设计高度,使车身进入对应的车身状态,车身状态包括后述的至少一种:复位状态、侧跪状态、车身抬高状态、车身降低状态;复位状态对应的车身两侧的车身高度均为初始设计高度;侧跪状态对应的车身两侧的车身高度一侧为第一设计高度、另一侧为第二设计高度;车身抬高状态对应车身两侧的车身高度均为第二设计高度;车身降低状态对应车身两侧的车身高度均为第一设计高度。
本发明的一种公交车车身高度主动控制方法,步骤包括:(1)进入控制模式;(2)在各控制模式下,控制单元通过控制驱动机构而控制输出轴长度至设定长度,将两侧的车身高度调整至与设定长度相应的设计高度,使车身进入对应的车身状态;所述驱动机构连接在车底盘上,驱动机构具有输出上下往复直线运动的输出轴,输出轴上端与调整杆铰接,输出轴输出的直线运动通过调整杆、控制杆带动高度阀切换状态,控制高度阀实现充放气功能以调节车身高度;所述控制单元中储存有输出轴的设定长度与车身设计高度的对应关系,控制单元中还储存有通过控制输出轴长度至设定长度,将车身高度调整至与设定长度相应的设计高度的控制程序;所述输出轴的设定长度与车身的设计高度的对应关系是通过标定获得,测量车身高度、控制和测量输出轴长度:当车身高度位于初始设计高度时,记录此时输出轴长度为初始设定长度a0;当车身位于低于初始设计高度设定值的第一设计高度时,记录此时输出轴长度为第一设定长度a1;当车身位于高于初始设计高度设定值的第二设计高度时,记录此时输出轴长度为第二设定长度a2。
本发明提供的一种公交车车身高度主动控制方法,该方法在不同控制模式下,通过控制单元及驱动机构,主动控制空气弹簧充放气,从而实现主动控制车身高度功能,结构简单,成本较低,并且能够实现各种车身状态。
进一步的,所述第一设计高度低于初始设计高度30mm,所述第二设计高度高于初始设计高度30mm。
进一步的,所述车身状态包括后述的至少一种:复位状态、侧跪状态、车身抬高状态、车身降低状态;复位状态对应的车身两侧的车身高度均为初始设计高度;侧跪状态对应的车身两侧的车身高度一侧为第一设计高度、另一侧为第二设计高度;车身抬高状态对应车身两侧的车身高度均为第二设计高度;车身降低状态对应车身两侧的车身高度均为第一设计高度。
进一步的,所述的各控制模式下,根据功能按键状态实现需激活功能或者自动实现自动功能,需激活功能包括后述的至少一种:复位功能、侧跪功能、车身抬高功能,自动功能为车身自动降低功能;复位功能对应复位状态,复位状态对应的车身两侧的车身高度均为初始设计高度;侧跪功能对应侧跪状态;车身抬高功能对应车身抬高状态;车身自动降低功能对应车身降低状态。
进一步的,所述控制模式包括:低速模式、中速模式、高速模式;当车速小于等于第一速度,进入低速模式;当车速大于第一速度而小于第二速度,进入中速模式;当车速大于等于第二速度且持续时间超过设定时间,进入高速模式;所述低速模式下,根据功能按键状态能够实现的需激活功能为所述的侧跪功能和车身抬高功能,以便于乘客方便上下车和提高通过性;在中速模式下,根据功能按键状态能够实现的需激活功能为所述的车身抬高功能,此时侧跪功能失效,避免出现危险;在高速模式下,能够自动实现所述的车身自动降低功能,提高车辆稳定性,侧跪、车身抬高功能均失效。
附图说明
图1是背景技术中介绍的现有技术的示意图;
图2是本发明的一种公交车车身高度主动控制装置的实施例的示意图;
图3是本发明的一种公交车车身高度主动控制方法的实施例的流程图;
图中:
1、电机;2、输出轴;3、调整杆;4、控制杆;5、高度阀;6、空气弹簧。
具体实施方式
本发明的一种公交车车身高度主动控制装置的一种实施例,如图2、图3所示,包括:控制单元、电机1、调整杆3、控制杆4和高度阀5。电机1为直线步进电机1,其输出轴2为能够输出往复直线运动的螺杆,高度阀5与车身相连,电机1与车底盘相连,车底盘与车身之间设置空气弹簧6,随空气弹簧6刚度改变,车身能相对于车底盘升降而改变车身高度。电机1能够控制输出轴2相对于电机1本体向上伸出的伸出长度,即输出轴长度,输出轴2为竖直设置,输出轴2与调整杆3铰接,调整杆3与控制杆4铰接,电机1的输出轴2输出直线运动,通过调整杆3、控制杆4控制转化为高度阀5的阀芯动作,控制高度阀5实现充放气功能,调节车身高度。其中调整杆3、控制杆4、高度阀5属于现有技术,与背景技术中的传统商用车空气悬架使用机械式高度阀控制空气弹簧6充放气的相关结构相同,只是将调整杆3与底盘铰接的铰接座更换为电机1,并用电机1的输出轴2与调整杆3铰接。
输出轴2向上伸长或向下缩短,即输出轴长度的变化,能够对应调整杆3、控制杆4的位置以及高度阀5的状态,输出轴2向上伸长到一定长度(输出轴长度变大),控制杆4正向转动(设定向高度阀5充气状态切换的旋转方向为正向)并带动高度阀5的阀芯动作,对应高度阀5的充气状态,气弹簧被充气,使车身相对于车底盘升高,而在车身升高过程中,控制杆4也随之反向转动,逐渐返回到平衡位置(对应高度阀5关闭状态),相应的,车身升高到一定高度后停止。反之,输出轴2向下缩短一定长度(输出轴长度变小),由于控制杆4的随动以及气弹簧被放气后达到另一个平衡状态,也必然能够实现车身降低到一定高度后的停止。所以根据上述原理,通过标定,必能建立输出轴长度与车身高度的对应关系,具体的,在车辆首次运营时,通过测量车身高度、控制和测量输出轴长度,就能够对车身设计高度与输出轴2设定长度的对应关系进行标定,当车身高度位于初始设计高度时,记录此时输出轴长度为初始设定长度a0;当车身位于第一设计高度,即低于初始设计高度30mm时,记录此时输出轴长度为第一设定长度a1;当车身位于第二设计高度,即高于初始设计高度30mm时,记录此时输出轴长度为第二设定长度a2。前述的输出轴2的设定长度与车身设计高度的对应关系被储存在控制单元中,控制单元与电机1连接,控制单元中储存有控制程序(车身高度控制策略),用于控制电机1而控制输出轴长度至设定长度,将车身高度调整至与设定长度相应的设计高度。
进一步的,为实现侧跪功能,即车身左右两侧高度为一高一低,以便于乘客方便上下车,空气弹簧6分为对应左右侧车身的左右两组,与之相应的,车身高度也被分为两侧车身高度。
本发明的上述实施例在使用时,控制单元执行控制程序而执行的方法,即为本发明一种公交车车身高度主动控制方法的一种实施例,该方法在首次执行前,如前述的,已预先标定了前述的三组输出轴2的设定长度与车身设计高度的对应关系。
该方法的步骤包括:
(1)获取当前车速并输入控制单元,控制单元根据当前车速判断需要进入的控制模式,控制模式包括:低速模式、中速模式、高速模式;当车速小于等于第一速度,进入低速模式;当车速大于第一速度而小于第二速度,进入中速模式;当车速大于等于第二速度且持续时间超过设定时间,进入高速模式。具体的,第一速度设定为5km/h,第二速度设定为40km/h。
(2)在各控制模式下,根据功能按键状态实现需激活功能或者自动实现自动功能,控制单元通过控制电机1而控制输出轴长度至设定长度,将两侧的车身高度调整至与设定长度相应的设计高度,使车身进入对应的车身状态,需激活功能包括:复位功能、侧跪功能、车身抬高功能,自动功能为车身自动降低功能;复位功能对应复位状态,复位状态对应的车身两侧的车身高度均为初始设计高度;侧跪功能对应侧跪状态,侧跪状态对应的车身两侧的车身高度一侧为第一设计高度、另一侧为第二设计高度;车身抬高功能对应车身抬高状态,车身抬高状态对应车身两侧的车身高度均为第二设计高度;车身自动降低功能对应车身降低状态,车身降低状态对应车身两侧的车身高度均为第一设计高度。
所述低速模式下,根据功能按键状态能够实现的需激活功能有:侧跪功能和车身抬高功能,以便于乘客方便上下车和提高通过性;在中速模式下,根据功能按键状态能够实现的需激活功能有:车身抬高功能,此时侧跪功能失效,避免出现危险;在高速模式下,能够自动实现自动功能:车身自动降低功能,提高车辆稳定性,侧跪、车身抬高功能均失效。
各控制模式与车速的对应关系,以及控制模式下的对应功能如下表所示:
具体的,在低速模式下,此时具备侧跪和车身抬高功能,两侧输出轴长度调整为a0。①当不触发侧跪、车身抬高功能按键,或触发复位按键时,两侧输出轴长度保持为a0,车身高度不发生变化,为初始设计高度;②当触发车辆抬高功能按键时,两侧输出轴长度调整为a2,车身较初始设计高度抬高30mm,车身两侧的车身高度均为第二设计高度,提高通过性;③当触发侧跪功能按键时,一侧输出轴长度调整为a1,另一侧输出轴长度调整为a2,即车身两侧的车身高度一侧为第一设计高度、另一侧为第二设计高度,实现侧跪功能。
在中速模式下,此时侧跪功能失效,仅具备车身抬高功能。①当不触发车身抬高功能按键,或触发复位按键时,两侧输出轴长度保持为a0,车身高度不发生变化,为初始设计高度;②当触发车辆抬高功能按键时,两侧输出轴长度调整为a2,车身两侧的车身高度均为第二设计高度,提高通过性。
在高速模式下,此时侧跪功能和车身抬高功能均失效。当切换为高速模式时,两侧输出轴长度调整为a1,车身两侧的车身高度均为第一设计高度(较初始设计高度降低30mm),提高车辆行驶稳定性。
另外,当车速大于等于第二速度(40km/h)但是持续时间小于设定时间(10s),则车身抬高功能、侧跪功能失效,两侧输出轴长度保持为a0。
另外,本发明的其它实施例中,能够输出设定长度的往复直线运动的输出轴也可以是其它驱动机构的输出轴,而不限于直线步进电机,例如液压缸的输出轴,或者是增加了将旋转转化为直线输出的传动机构的驱动机构,也属于实现本发明的技术方案的实施例。
- 一种横向互联空气悬架车身高度与互联状态博弈控制方法
- 一种半主动悬架的车身高度补偿的控制方法
- 一种车身主动控制方法、装置及车辆