整车半主动悬架控制方法、系统、车辆及存储介质
文献发布时间:2024-01-17 01:26:37
技术领域
本申请涉及车辆悬架控制领域,具体涉及一种整车半主动悬架控制方法、一种整车半主动悬架控制系统、一种车辆以及一种计算机可读存储介质。
背景技术
半主动悬架控制大多基于1/4悬架进行垂向振动控制的研究,其中传统控制方法有shyhook天棚控制、grounhook地棚控制、ADD加速度控制及shyhook-Add控制,同时也衍生了滑膜控制、最优控制、模糊控制、基于不变点的频分控制法。以上方法均是基于垂向振动控制进行半主动悬架算法开发及优化,能一定程度提升舒适性。
如发明专利“汽车半主动悬架系统频域控制方法”(申请号:201310111507.X,公开日:2013.07.17),主要基于半主动悬架不变点特性,进行不同频率的悬架特性研究,基于不同频率范围,进行阻尼选择。对垂向振动控制具有启发性作用,但半主动悬架控制还需考虑一些特殊场景的控制如操稳工况下整车侧倾控制等。当然也有将天棚及地棚进行混合控制,以控制车辆抓地力,平衡车辆舒适性及操稳性能,但效果并不显著。
随着半主动悬架的应用,越来越多控制方法已经意识到特殊场景下,基于垂向的控制算法已经不能满足需求,所以融合多工况的控制方法也逐渐发展并应用。如发明专利“汽车电控半主动悬架系统控制方法”(申请号:202110480180.8,公开日:2021.07.23),根据工况识别及驾驶风格,进行特殊场景及主算法的选择,同时也可根据选择权重系数进行混合控制。该专利有效的将特殊场景及基础工况进行融合,有利于改善车辆操稳特性,但其中控制方法,仍不够精细,并未对侧倾控制方法进行分场景,提出更全面详细的策略。
又如发明专利“一种车辆半主动悬架集成控制方法及控制”(申请号:201910979224.4,公开日:2021.04.16),也提出了考虑转向工况及俯仰工况的控制方法。根据侧向加速度或则方向盘转角,根据纵向加速度等进行工况判定是否有侧倾、俯仰趋势进行阻尼力控制。但也未针对具体车体侧倾控制进行详细场景划分,并进行全面详细控制策略制定。
发明内容
本申请的目的之一在于提供一种整车半主动悬架控制方法,该整车半主动悬架控制方法可以解决现有技术中的车辆半主动悬架控制过程没有进行详细场景划分,从而无法提供详细的控制策略定制的问题;目的之二在于提供一种整车半主动悬架控制系统;目的之三在于提供一种车辆。
为了实现上述目的,本申请采用的技术方案如下:
一种整车半主动悬架控制方法,所述方法包括:
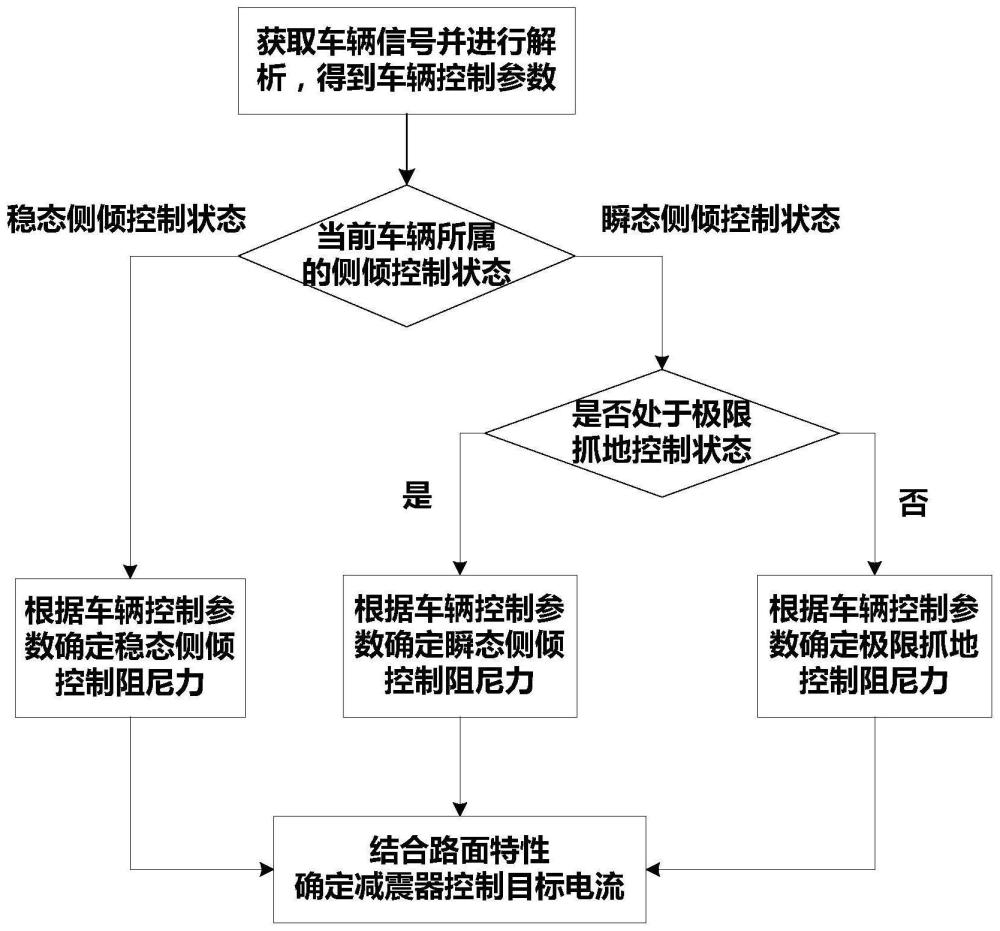
获取车辆信号并进行解析,得到车辆控制参数;
根据所述车辆控制参数判断当前车辆所属的侧倾控制状态;
若当前车辆属于稳态侧倾控制状态,则根据所述车辆控制参数确定稳态侧倾控制阻尼力;
若当前车辆属于瞬态侧倾控制状态,则根据所述车辆控制参数确定当前车辆是否处于极限抓地控制状态;
若当前车辆不处于极限抓地控制状态,则根据所述车辆控制参数确定瞬态侧倾控制阻尼力;
若当前车辆处于极限抓地控制状态,则根据所述车辆控制参数确定极限抓地控制阻尼力;
根据所述稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力,结合路面特性,确定减震器控制目标电流。
根据上述技术手段,根据获取的车辆控制参数来判断当前车辆所属的侧倾控制状态,上述技术手段将侧倾控制状态更详细的分为了稳态侧倾控制状态、瞬态侧倾控制状态以及极限抓地控制状态,根据不同的控制状态确定不同的控制阻尼力,从而得到减震器控制目标电流,控制场景更丰富,适用性更高。
在本申请实施例中,所述车辆控制参数包括:车辆运行参数、悬架状态参数、车辆固有参数和车辆状态参数;
所述车辆运行参数包括:车速、侧向加速度、纵向加速度、方向盘转角及方向盘角速度;
所述悬架状态参数包括:车体前左加速度、车体前右加速度、车体后左加速度、车体后右加速度中的至少三个,以及前左高度传感器参数、前右高度传感器参数、后左高度传感器参数和后右高度传感器参数;
所述车辆固有参数包括:车辆整备质量、轴距、轮距、质心高度、前轴侧倾角刚度以及后轴侧倾角刚度;
所述车辆状态参数包括:车辆侧倾角、减振器速度、簧下加速度和车辆俯仰角。车辆运行参数体现了车辆的运行状态,悬架状态参数体现了当前悬架的状态,是悬架控制的基础,车辆固有参数需要用于辅助确定悬架的控制状态和控制阻尼力,车辆状态参数反应了车辆当前的姿态。
在本申请实施例中,获取车辆信号并进行解析,得到车辆控制参数,包括:
获取CAN信号,并转换为车辆运行参数;
获取悬架传感器信号作为悬架状态参数;
获取车辆固有参数;
根据悬架状态参数和车辆固有参数估算车辆状态参数。
通过上述技术手段可以从不同的途径获取到车辆控制参数,为半主动悬架控制提供需要的计算数据。
在本申请实施例中,根据悬架状态参数和车辆固有参数估算车辆状态参数,包括:
估算减震器速度:
根据当前位置的高度传感器参数查表得到当前位置对应的悬架位移;
根据当前位置对应的悬架位移进行微分得到当前位置对应的悬架相对速度;
将当前位置对应的悬架相对速度与减震器杠杆比相乘,得到估算的减震器速度;
估算车辆侧倾角:
分别对车体前排两个加速度或后排两个加速度进行两次积分;
计算车体前排两个积分之差或者计算后排两个积分之差,得到左右车体位移差;
根据左右车体位移差和对应的前排或后排的轮距估算车辆侧倾角;
估算簧下加速度:
根据当前位置的高度传感器参数查表得到当前位置对应的悬架位移;
根据当前位置对应的悬架位移进行两次微分得到当前位置对应的悬架相对加速度;
将当前位置对应的车体加速度减去当前位置对应的悬架相对加速度,得到当前位置对应的簧下加速度;
估算车辆俯仰角:
分别对车体左侧两个加速度或者右侧两个加速度进行两次积分;
计算车体左侧两个加速度积分之差或者计算右侧两个加速度积分之差,得到前后车体位移差;
根据前后车体位移差和轴距估算车辆俯仰角。
通过上述技术手段,通过传感器采集的悬架状态参数查表获得悬架位移,依据悬架位移可以估算得到减震器的速度及簧下加速度。而车辆同一排两个点位的位移差体现了车辆侧倾姿态,通过车辆任意一排的两个加速度两次积分的位移差可以得到左右车体位移差,结合轮距计算得到车辆侧倾角;而车辆同一侧的两个点位的位移差体现了车辆的俯仰姿态,通过车辆任意一侧的两个加速度两次积分的位移差可以得到前后车体位移差,结合轴距计算得到车辆俯仰角,充分体现了车辆的当前姿态。
在本申请实施例中,根据所述车辆控制参数判断当前车辆所属的侧倾控制状态,包括:
将当前方向盘角速度以及侧向加速度与对应的预设阈值进行比较;
若当前方向盘角速度不大于第一方向盘角速度阈值,且侧向加速度不大于第一侧向加速度阈值,则判定当前车辆属于稳态侧倾控制状态;
若当前方向盘角速度大于第一方向盘角速度阈值,且侧向加速度大于第一侧向加速度阈值,则判定当前车辆属于瞬态侧倾控制状态。
通过上述技术方案可以通过方向盘角速度和侧向加速度确定车辆所属的侧倾控制状态,为更细化的进行侧倾控制提供了划分的标准。
在本申请实施例中,根据所述车辆控制参数确定稳态侧倾控制阻尼力,包括:
根据所述侧向加速度进行稳态减震器阻尼力查表,得到稳态侧倾控制阻尼力。
通过上述技术手段可以快速确认稳态侧倾控制阻尼力,虑到横风等场景的影响,通过侧向加速度进行减振器阻尼力查表输出实现车辆半自动悬架控制。
在本申请实施例中,根据所述车辆控制参数确定当前是否处于极限抓地控制状态,包括:
根据车辆控制参数估算轮胎垂向力;
在当前侧向加速度大于第二侧向加速度阈值、轮胎垂向力中的最小值小于预设轮胎垂向力阈值,且侧向加速度大于第二侧向加速度阈值、轮胎垂向力中的最小值小于预设轮胎垂向力阈值的持续时间大于预设时间阈值的情况下,判定当前车辆属于极限抓地控制状态。
通过上述技术手段,当过弯速度较大时,车辆处于极限状态时,可能出现抓地性力不足现象,对阻尼需求与瞬态侧倾控制大阻尼相反,通过上述技术手段可以确定当前是否需要进行极限抓地控制,有利于全侧向加速度范围管控。
在本申请实施例中,根据车辆控制参数估算轮胎垂向力,包括:
根据车辆控制参数估算横向载荷转移;
根据车辆控制参数估算纵向载荷转移;
根据车辆控制参数估算质量分配量;
根据所述质量分配量、横向载荷转移以及纵向载荷转移计算各轮胎垂向力。
通过上述技术手段可以根据车辆控制参数计算得到轮胎垂向力,为判断极限抓地控制状态提供了数据支持。
在本申请实施例中,采用如下公式估算横向载荷转移:
其中,m为车辆整备质量;a
采用如下公式估算纵向载荷转移:
其中,a
采用如下公式估算质量分配量:
其中,b为质心距后轴中心距离;
采用如下公式计算各轮胎垂向力:
F
F
F
F
其中,F
通过上述技术手段可以计算得到纵向载荷转移、横向载荷转移、质量分配量以及各轮胎垂向力,计算参数基于当前的车辆参数,准确度高。
在本申请实施例中,根据所述车辆控制参数确定极限抓地控制阻尼力,包括:
计算各轮胎垂向力与预设轮胎垂向力阈值的差值;
根据所述差值进行查表得到阻尼力折扣系数;
根据所述车辆控制参数确定瞬态侧倾控制阻尼力;
计算所述瞬态侧倾控制阻尼力与所述阻尼力折扣系数的乘积,作为极限抓地控制阻尼力。
通过上述技术手段可以计算得到极限抓地控制阻尼力,阻尼力折扣系数通过标定获取,避免了复杂算法的迭代计算,响应速度快。
在本申请实施例中,根据所述车辆控制参数确定瞬态侧倾控制阻尼力,包括:
根据侧向加速度查表或者根据方向盘转角及车速查表确定瞬态转向基础阻尼力;
根据车速和方向盘角速度查表确定瞬态转向动态阻尼力;
根据所述瞬态转向基础阻尼力和瞬态转向动态阻尼力计算瞬态侧倾控制阻尼力。
考虑到过弯出弯场景下侧向加速度响应慢于方向盘转角,采用方向盘转角及方向盘角速度进行瞬态侧倾控制,根据基于侧向加速度的瞬态转向基础阻尼力和基于车速和方向盘角速度的瞬态转向动态阻尼力来确定瞬态侧倾控制阻尼力,融合了侧向加速度进行瞬态侧倾控制,避免方向盘过于灵敏对稳态特性的影响。
在本申请实施例中,根据车速和方向盘角速度确定瞬态转向动态阻尼力,包括:
对方向盘角速度进行动态鲁棒性处理,得到动态方向盘角速度;
判断动态方向盘角速度与方向盘转角是否同相;
若同相,则判定方向盘角速度处于上升趋势;
根据车速和方向盘角速度进行上升沿阻尼力查表,确定瞬态转向动态阻尼力;
若不相同,则判定方向盘角速度处于下降趋势;
根据车速和方向盘角速度进行下降沿阻尼力查表,确定瞬态转向动态阻尼力。
通过上述技术手段,在瞬态转向中考虑动态鲁棒性,通过动态鲁棒性处理,实现在方向盘角速度逐渐增加达到最大值时,进行一定时间保持,避免因方向盘角速度突变,带来阻尼力查找不停震荡,鲁棒性较差的不足。同时针对方向盘角速度增加或者减小进行上升沿及下降沿分开标定阻尼力,更贴近用户实际需求。
在本申请实施例中,根据所述瞬态转向基础阻尼力和瞬态转向动态阻尼力计算瞬态侧倾控制阻尼力,包括:
将所述瞬态转向基础阻尼力与所述瞬态转向动态阻尼力叠加,得到瞬态侧倾控制阻尼力;或者
获取所述瞬态转向基础阻尼力和所述瞬态转向动态阻尼力中的最大值作为瞬态侧倾控制阻尼力。
通过上述技术手段确定的瞬态侧倾控制阻尼力融合了方向盘角速度和侧向加速度进行控制,更贴合实际。
在本申请实施例中,根据所述稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力结合路面特性确定减震器控制目标电流,包括:
根据当前车速以及簧下加速度确定当前路面等级;
根据当前路面的等级及当前车速查表确定增益系数;
将稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力与增益系数相乘,得到目标输出阻尼力;
将目标输出阻尼力结合减震器速度查表确定减震器控制目标电流。
通过上述技术手段,在最终确定减震器控制目标电流时充分考虑路面特性的影响,输出的阻尼力更贴合实际场景,提升用户感受。另一方面,将路面特性进行分级标定,并与车速结合进行增益系数查找,响应速度快。
本申请第二方面提供一种整车半主动悬架控制系统,所述系统包括:
信号处理单元,用于获取车辆信号并进行解析,得到车辆控制参数;
侧倾控制状态确定单元,用于根据所述车辆控制参数判断当前车辆所属的侧倾控制状态;
稳态侧倾控制阻尼力确定单元,用于在当前车辆属于稳态侧倾控制状态时,根据所述车辆控制参数确定稳态侧倾控制阻尼力;
极限抓地控制状态判断单元,用于在当前车辆属于瞬态侧倾控制状态时,根据所述车辆控制参数确定当前是否处于极限抓地控制状态;
瞬态侧倾控制阻尼力确定单元,用于在当前车辆属于瞬态侧倾控制状态且不处于极限抓地控制状态时,根据所述车辆控制参数确定瞬态侧倾控制阻尼力;
极限抓地控制阻尼力确定单元,用于在当前车辆处于极限抓地控制状态时,根据所述车辆控制参数确定极限抓地控制阻尼力;
目标电流确定单元,用于根据所述稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力结合路面特性确定减震器控制目标电流。
通过上述技术手段,该系统在运行时可以根据获取的车辆控制参数来判断当前车辆所属的侧倾控制状态,在控制过程中将侧倾控制状态更详细的分为了稳态侧倾控制状态、瞬态侧倾控制状态以及极限抓地控制状态,根据不同的控制状态确定不同的控制阻尼力,从而得到减震器控制目标电流,控制场景更丰富,适用性更高。
本申请第三方面提供一种车辆,所述车辆采用所述的整车半主动悬架控制方法计算减震器控制目标电流。
本申请还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的整车半主动悬架控制方法。
本申请的有益效果:
(1)本申请对整车侧倾控制进行分场景详细的控制方法设计,分为稳态侧倾控制、瞬态转向控制以及极限抓地控制,应用场景更丰富,更贴合实际的侧倾控制场景;
(2)本申请在瞬态侧倾控制中,在瞬态转向中考虑动态鲁棒性,通过动态鲁棒性处理,实现在方向盘角速度逐渐增加达到最大值时,进行一定时间保持,避免因方向盘角速度突变,带来阻尼力查找不停震荡,鲁棒性较差的不足;
(3)本申请在瞬态侧倾控制中,针对方向盘角速度增加或者减小进行上升沿及下降沿分开标定阻尼力,更贴近用户实际需求;
(4)本申请的方法针对过弯速度较大时,车辆处于极限状态时,可能出现抓地性力不足现象,对阻尼需求与瞬态侧倾控制大阻尼相反的状态,提出了极限抓地控制,有利于全侧向加速度范围管控;
(5)在最终确定减震器控制目标电流时充分考虑路面特性的影响,输出的阻尼力更贴合实际场景,提升用户感受。
附图说明
图1为本申请一种实施方式提供的整车半主动悬架控制方法流程图;
图2为本申请提供的整车侧倾控制工作区域原理图;
图3为本申请实施例中整车侧倾控制传感器架构图;
图4为本申请实施例中动态鲁棒性效果图;
图5为本申请实施例中路面特性增益系数查表图;
图6为本申请实施例中整车侧倾控制原理框图;
图7为本申请实施例中瞬态侧倾控制原理框图;
图8为本申请实施例中整车半主动悬架控制系统框图。
其中,M70-信号处理模块,M701-传感器信号处理模块,M702-CAN信号转换模块,M703-信号滤波处理模块,M704-车辆状态信号估计模块;
M90-主控制方法模块,M901-稳态侧倾控制模块,M902-瞬态侧倾控制模块,M903-极限抓地控制模块,M904-路面特性影响因子估算模块,M905-阻尼力电流转换模块,M902-1-瞬态转向基础阻尼力计算模块,M902-2-瞬态转向动态阻尼力Fsb计算模块;
11-前左高度传感器,12-前左加速度传感器,21-前右高度传感器,22-前右加速度传感器,31-后左高度传感器,32-后左加速度传感器,41-后右高度传感器,60-控制模块,13-方向盘转角传感器;
S11-前左高度传感器信号,S12-前左加速度传感器信号,S21-前右高度传感器信号,S22-前右加速度传感器信号,S31-后左高度传感器信号,S32-后左加速度传感器信号,S33-侧向加速度信号,S41-后右高度传感器信号,S43-纵向加速度信号,S53-方向盘转速信号,S63-侧向加速度信号。
具体实施方式
以下将参照附图和优选实施例来说明本申请的实施方式,本领域技术人员可由本说明书中所揭露的内容轻易地了解本申请的其他优点与功效。本申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本申请的精神下进行各种修饰或改变。应当理解,优选实施例仅为了说明本申请,而不是为了限制本申请的保护范围。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本申请的基本构想,遂图示中仅显示与本申请中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
本申请实施例提供了一种整车半主动悬架控制方法,如图1所示,所述方法包括:
获取车辆信号并进行解析,得到车辆控制参数。
根据所述车辆控制参数判断当前车辆所属的侧倾控制状态;
若当前车辆属于稳态侧倾控制状态,则根据所述车辆控制参数确定稳态侧倾控制阻尼力;
若当前车辆属于瞬态侧倾控制状态,则根据所述车辆控制参数确定当前车辆是否处于极限抓地控制状态;
若当前车辆不处于极限抓地控制状态,则根据所述车辆控制参数确定瞬态侧倾控制阻尼力;
若当前车辆处于极限抓地控制状态,则根据所述车辆控制参数确定极限抓地控制阻尼力;
根据所述稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力,结合路面特性,确定减震器控制目标电流。
本方法中,对整车侧倾控制主要基于图2所示的整车侧倾控制工作区域原理图,用户在实际过弯场景中有方向盘角速度SwaRate低于一定阈值且侧向加速度Ay低于一定阈值的区域为稳态侧倾控制区域(如以低于5deg/s的方向盘角速度缓打方向盘进行左转弯行驶);又如在日常变道超车时,方向盘角速度较大,该区域处于瞬态侧倾控制区域;当侧向加速度大于极限判定阈值且持续时间大于时间阈值时,则处于极限抓地控制区域。以上判定条件中阈值在具体车型中均可根据车辆实际需求进行标定。而当车辆处于不同控制区域时,对应整车侧倾控制目标不一致,对减振器阻尼力需求不一致,如在稳态侧倾控制区域主要通过增加阻尼力以改善车辆稳态侧倾角;在瞬态侧倾控制区域主要通过阻尼力快速响应改善车辆侧倾角速度;在极限抓地控制区域主要通过减小左右阻尼力差异改善车辆载荷转移,从而改善车辆极限抓地性。
根据上述技术手段,根据获取的车辆控制参数来判断当前车辆所属的侧倾控制状态,上述技术手段将侧倾控制状态更详细的分为了稳态侧倾控制状态、瞬态侧倾控制状态以及极限抓地控制状态,根据不同的控制状态确定不同的控制阻尼力,从而得到减震器控制目标电流,控制场景更丰富,适用性更高。
在本申请实施例中,所述车辆控制参数包括:车辆运行参数、悬架状态参数、车辆固有参数和车辆状态参数。车辆运行参数体现了车辆的运行状态,悬架状态参数体现了当前悬架的状态,是悬架控制的基础,车辆固有参数需要用于辅助确定悬架的控制状态和控制阻尼力,车辆状态参数反应了车辆当前的姿态。
在本申请实施例中,获取车辆信号并进行解析,得到车辆控制参数,包括:
获取CAN信号,并转换为车辆运行参数。在本申请实施例中,所述车辆运行参数包括:车速、侧向加速度、纵向加速度、方向盘转角及方向盘角速度,这些参数可以根据车辆动态车身控制系统DBC参数表中的偏移、放大因子或限值进行转换。获取到的侧向加速度、纵向加速度等信号需要进行低通滤波处理,使车辆侧倾控制主要集中在低频的操稳控制,过滤到平顺性相关的车辆侧倾姿态控制。
获取悬架传感器信号作为悬架状态参数。在本申请实施例中,所述悬架状态参数包括:车体前左加速度、车体前右加速度、车体后左加速度、车体后右加速度中的至少三个,以及前左高度传感器参数、前右高度传感器参数、后左高度传感器参数和后右高度传感器参数。车体加速度主要用于计算车辆的俯仰角和侧倾角,对于车辆侧倾角需要根据同一排的两个车体加速度来计算,对于车辆俯仰角则需要同一侧的两个车体加速度来计算,基于此,在车体前左加速度、车体前右加速度、车体后左加速度、车体后右加速度中,任意采集其中的三个即可实现车辆的俯仰角和侧倾角计算。在本申请一个实施例中,采用三个簧上加速度传感器来采集车体加速度,分别为前左加速度传感器、前右加速度传感器和后左加速度传感器。在获取到悬架传感器信号后,对传感器信号进行降噪处理,提升数据准确度。
如图3所示,该图上示出了本实施例中布置的传感器,图中,10为车辆底盘,在车辆左前轮布置了前左高度传感器11和前左加速度传感器12,在车辆右前轮布置了前右高度传感器21和前右加速度传感器22,在车辆左后轮布置了后左高度传感器31和后左加速度传感器32,在车辆后右轮置了后右高度传感器41,前左高度传感器11采集前左高度传感器信号S11并传输到控制模块60,前右高度传感器21采集前右高度传感器信号S21并传输到控制模块60;后左高度传感器31采集后左高度传感器信号S31并传输到控制模块60;后右高度传感器41采集后右高度传感器信号S41并传输到控制模块60;前左加速度传感器12采集前左加速度传感器信号S12并传输到控制模块60;前右加速度传感器22采集前右加速度传感器信号S22并传输到控制模块60;后左加速度传感器32采集后左加速度传感器信号S32并传输到控制模块60。图中还示出了方向盘转角传感器13,本申请中从CAN信号中获取方向盘转角信号S13。需要说明的是,本申请中的控制模块60可以是车辆原有的控制器。
获取车辆固有参数。在本申请实施例中,所述车辆固有参数包括:车辆整备质量、轴距、轮距、质心高度、前轴侧倾角刚度以及后轴侧倾角刚度。这些参数可以是存储在车辆上的存储装置中,通过调用的方式获取,也可以是直接通过赋值的方式将这些参数提供给本申请的整车半主动悬架控制方法。
根据悬架状态参数和车辆固有参数估算车辆状态参数。在本申请实施例中,所述车辆状态参数包括:车辆侧倾角、减振器速度、簧下加速度和车辆俯仰角。
在本申请实施例中,根据悬架状态参数和车辆固有参数估算车辆状态参数,包括:估算减震器速度、估算车辆侧倾角、估算簧下加速度和估算车辆俯仰角。
其中,估算减震器速度包括:
根据当前位置的高度传感器参数查表得到当前位置对应的悬架位移Ds;
根据当前位置对应的悬架位移Ds进行微分得到当前位置对应的悬架相对速度Vs;
将当前位置对应的悬架相对速度Vs与减震器杠杆比i相乘,得到估算的减震器速度Vd,Vd=Vs*i。其中,减震器杠杆比i是车辆固有参数。通过传感器采集的悬架状态参数查表获得悬架位移,依据悬架位移可以估算得到减震器的速度。
估算簧下加速度包括:
根据当前位置的高度传感器参数查表得到当前位置对应的悬架位移Ds;
根据当前位置对应的悬架位移进行两次微分得到当前位置对应的悬架相对加速度As;
将当前位置对应的车体加速度Ab减去当前位置对应的悬架相对加速度As,得到当前位置对应的簧下加速度Aw=Ab-As。通过传感器采集的悬架状态参数查表获得悬架位移,依据悬架位移可以估算得到簧下加速度。
估算车辆侧倾角包括:
分别对车体前排两个加速度或后排两个加速度进行两次积分;
计算车体前排两个积分之差或者计算后排两个积分之差,得到左右车体位移差;
根据左右车体位移差和对应的前排或后排的轮距估算车辆侧倾角。
估算车辆俯仰角包括:
分别对车体左侧两个加速度或者右侧两个加速度进行两次积分;
计算车体左侧两个加速度积分之差或者计算右侧两个加速度积分之差,得到前后车体位移差;
根据前后车体位移差和轴距估算车辆俯仰角。
车辆同一排两个点位的位移差体现了车辆侧倾姿态,通过车辆任意一排的两个加速度两次积分的位移差可以得到左右车体位移差,结合轮距计算得到车辆侧倾角;而车辆同一侧的两个点位的位移差体现了车辆的俯仰姿态,通过车辆任意一侧的两个加速度两次积分的位移差可以得到前后车体位移差,结合轴距计算得到车辆俯仰角,充分体现了车辆的当前姿态。
在本申请一个实施例中,簧上加速度传感器采集到的车体加速度为:车体前左加速度、车体前右加速度以及车体后左加速度。因此在计算车辆侧倾角时,采用车体前左加速度、车体前右加速度以及前轴轮距;车辆侧倾角计算公式如下:
其中,
在计算车辆俯仰角时,采用车体前左加速度、车体后左加速度以及轴距;车辆俯仰角计算公式如下:
其中,θ为车辆俯仰角,A
通过上述技术手段可以从不同的途径获取到车辆控制参数,为半主动悬架控制提供需要的计算数据。
在本申请实施例中,根据所述车辆控制参数判断当前车辆所属的侧倾控制状态,包括:
将当前方向盘角速度以及侧向加速度与对应的预设阈值进行比较;
若当前方向盘角速度不大于第一方向盘角速度阈值,且侧向加速度不大于第一侧向加速度阈值,则判定当前车辆属于稳态侧倾控制状态,稳态侧倾控制状态的主要控制目标为稳态侧倾角,对稳定性需求更高,相应速度的需求相对较小。
若当前方向盘角速度大于第一方向盘角速度阈值,且侧向加速度大于第一侧向加速度阈值,则判定当前车辆属于瞬态侧倾控制状态。瞬态侧倾控制状态的主要控制目标为侧倾角速度,对稳定性需求较响应快速的需求相对较小。
通过上述技术方案可以通过方向盘角速度和侧向加速度确定车辆所属的侧倾控制状态,为更细化的进行侧倾控制提供了划分的标准。在本申请实施例中第一方向盘角速度阈值和第一侧向加速度阈值根据车辆进行标定。
在本申请实施例中,根据所述车辆控制参数确定稳态侧倾控制阻尼力,包括:
根据所述侧向加速度进行稳态减震器阻尼力查表,得到稳态侧倾控制阻尼力,每个减震器确定得到一个稳态侧倾控制阻尼力。
通过上述技术手段可以快速确认稳态侧倾控制阻尼力,虑到横风等场景的影响,通过侧向加速度进行减振器阻尼力查表输出实现车辆半自动悬架控制,避免方向盘转角作为输入的波动。
考虑车辆过弯及出弯时,存在侧向加速度仍未建立或则仍未减小,而驾驶员已经增加方向盘转角或减小方向盘转角输入的现象,若基于侧向加速度进行阻尼力标定,易导致响应慢于驾驶员预期。所以当满足瞬态侧倾控制状态条件时,即通过方向盘转角及车速计算瞬态转向基础阻尼力,并考虑方向盘角速度较大时瞬态侧倾控制触发,通过方向盘角速度及车速进行瞬态转向动态阻尼力计算,并将瞬态转向基础阻尼力及瞬态转向动态阻尼力进行叠加计算输出。
在本申请实施例中,根据所述车辆控制参数确定瞬态侧倾控制阻尼力,包括:
根据侧向加速度查表或者根据方向盘转角及车速查表确定瞬态转向基础阻尼力。在本申请实施例中,可以根据侧向加速度进行阻尼力一维查表,或者根据方向盘转角及车速进行二维查表。
根据车速和方向盘角速度查表确定瞬态转向动态阻尼力,具体包括:
对方向盘角速度进行动态鲁棒性处理,得到动态方向盘角速度。考虑当车辆方向盘角速度达到峰值时,在下一时刻存在减小的现象,通过动态鲁棒性处理时方向盘角速度在达到峰值时,在一定时间保持在峰值,从而避免因波动导致瞬间卸压感觉,造成车辆横向突变的感觉,避免因方向盘角速度突变,带来阻尼力查找不停震荡,鲁棒性较差。如图4所示,处理后的方向盘角速度为动态方向盘角速度DynSwaRat,处理前方向盘角速度为SwaRat,从图中可以看出,通过动态鲁棒性处理后,动态方向盘角速度在峰值后减小时会保持峰值一定时间。
考虑上升沿及下降沿时阻尼力不同需求标定;当方向盘角速度与方向盘转角同向时且不断增加时即上升沿,需要阻尼力更大;反之则适当减小阻尼力,因此在确定瞬态转向动态阻尼力时,首先判断动态方向盘角速度与方向盘转角是否同相;
若同相,则判定方向盘角速度处于上升趋势;
根据车速和方向盘角速度进行上升沿阻尼力查表,确定瞬态转向动态阻尼力;
若不相同,则判定方向盘角速度处于下降趋势;
根据车速和方向盘角速度进行下降沿阻尼力查表,确定瞬态转向动态阻尼力。
通过上述技术手段,在瞬态转向中考虑动态鲁棒性,通过动态鲁棒性处理,实现在方向盘角速度逐渐增加达到最大值时,进行一定时间保持,避免因方向盘角速度突变,带来阻尼力查找不停震荡,鲁棒性较差的不足。同时针对方向盘角速度增加或者减小进行上升沿及下降沿分开标定阻尼力,更贴近用户实际需求。
根据所述瞬态转向基础阻尼力和瞬态转向动态阻尼力计算瞬态侧倾控制阻尼力。
考虑到过弯出弯场景下侧向加速度响应慢于方向盘转角,采用方向盘转角及方向盘角速度进行瞬态侧倾控制,根据基于侧向加速度的瞬态转向基础阻尼力和基于车速和方向盘角速度的瞬态转向动态阻尼力来确定瞬态侧倾控制阻尼力,融合了侧向加速度进行瞬态侧倾控制,避免方向盘过于灵敏对稳态特性的影响。
在本申请实施例中,根据所述瞬态转向基础阻尼力和瞬态转向动态阻尼力计算瞬态侧倾控制阻尼力,包括:
将所述瞬态转向基础阻尼力与所述瞬态转向动态阻尼力叠加,得到瞬态侧倾控制阻尼力:
F
其中,F
或者获取所述瞬态转向基础阻尼力和所述瞬态转向动态阻尼力中的最大值作为瞬态侧倾控制阻尼力:
F
通过上述技术手段确定的瞬态侧倾控制阻尼力融合了方向盘角速度和侧向加速度进行控制,更贴合实际。为了避免瞬态作用过于强烈,导致后期与平顺性结合并不好,推荐使用叠加方式计算得到的瞬态侧倾控制阻尼力。每个减震器计算得到一个瞬态侧倾控制阻尼力。
在本申请实施例中,根据所述车辆控制参数确定当前是否处于极限抓地控制状态,包括:
根据车辆控制参数估算轮胎垂向力;
在当前侧向加速度大于第二侧向加速度阈值、轮胎垂向力中的最小值小于预设轮胎垂向力阈值,且侧向加速度大于第二侧向加速度阈值、轮胎垂向力中的最小值小于预设轮胎垂向力阈值的持续时间大于预设时间阈值的情况下,判定当前车辆属于极限抓地控制状态。
通过上述技术手段,当过弯速度较大时,车辆处于极限状态时,可能出现抓地性力不足现象,对阻尼需求与瞬态侧倾控制大阻尼相反,通过上述技术手段可以确定当前是否需要进行极限抓地控制,有利于全侧向加速度范围管控。
轮胎垂向力估算主要包括三部分,横向载荷转移,纵向载荷转移及质量分配量计算,在本申请实施例中,根据车辆控制参数估算轮胎垂向力,包括:
根据车辆控制参数估算横向载荷转移。横向载荷转移主要指车辆离心力导致的载荷转移及车辆重力引起的载荷转移,计算公式如下:
其中,m为车辆整备质量;a
根据车辆控制参数估算纵向载荷转移。纵向载荷转移主要指车辆纵向加速度带来载荷转移及车辆重力引起的载荷转移,计算公式如下:
其中,a
根据车辆控制参数估算质量分配量。质量分配量主要指车辆自身重力的分配,计算公式如下:
其中,b为质心距后轴中心距离。
根据所述质量分配量、横向载荷转移以及纵向载荷转移计算各轮胎垂向力。各轮胎垂向力采用如下公式计算:
F
F
F
F
其中,F
将质量分配量、横向载荷转移以及纵向载荷转移代入上述公式后,各轮胎垂向力计算公式表示为:
通过上述技术手段可以计算得到纵向载荷转移、横向载荷转移、质量分配量以及各轮胎垂向力,计算参数基于当前的车辆参数,准确度高。通过上述技术手段可以根据车辆控制参数计算得到轮胎垂向力,为判断极限抓地控制状态提供了数据支持。
在本申请实施例中,根据所述车辆控制参数确定极限抓地控制阻尼力,包括:
计算各轮胎垂向力与预设轮胎垂向力阈值的差值;需要说明的是,用于计算差值的预设轮胎垂向力阈值与用于判定极限抓地控制状态的预设轮胎垂向力阈值为同一值。
根据所述差值进行查表得到阻尼力折扣系数,阻尼力折扣系数根据轮胎垂向力与预设轮胎垂向力阈值的差值进行标定,当差值越大,阻尼力折扣系数越大。
根据所述车辆控制参数确定瞬态侧倾控制阻尼力。瞬态侧倾控制阻尼力确定方式与前述一致。
计算所述瞬态侧倾控制阻尼力与所述阻尼力折扣系数的乘积,作为极限抓地控制阻尼力:
F
其中,F
通过上述技术手段可以计算得到极限抓地控制阻尼力,阻尼力折扣系数通过标定获取,避免了复杂算法的迭代计算,响应速度快。
在本申请实施例中,根据所述稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力结合路面特性确定减震器控制目标电流,包括:
根据当前车速以及簧下加速度确定当前路面等级。在本申请实施例中,路面等级的分级根据具体车型性能需求定制。在定制路面等级分级的过程中,首先建立的不同路面数据集,如包括乡村路、破损路、光滑沥青路及粗糙水泥路等,可根据具体车型需求选择制定路面集,然后在不同路面上及不同车速下结合簧下加速度对路面等级进行分级定制。
根据当前路面的等级及当前车速查表确定增益系数。根据实车标定建立车速、路面等级及增益系数的二维表格,表格示例如图5所示。在实车使用过程中,根据该表格确定增益系数。如图5所示,二维表格中,列表示路面等级,行表示车速。当路面等级为1级时,当前车速为vspd1时,增益为G11,其他路面等级和车速依此查表。
根据稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力与增益系数相乘,得到目标输出阻尼力;
将目标输出阻尼力结合减震器速度查表确定减震器控制目标电流。
通过上述技术手段,在最终确定减震器控制目标电流时充分考虑路面特性的影响,输出的阻尼力更贴合实际场景,提升用户感受。另一方面,将路面特性进行分级标定,并与车速结合进行增益系数查找,响应速度快。
如图6所示,是申请实施例提供是整车侧倾控制原理框图。本申请中整车半主动悬架控制主要分为两大模块:信号处理模块M70及主控制方法模块M90,其中主控制方法模块M90也适合其他非本申请展示的传感器架构(如图3)及信号处理方法,可灵活应用于其他传感器架构及信号处理方法。
信号处理模块M70主要包括子模块:传感器信号处理模块M701、CAN信号转换模块M702、信号滤波处理模块M703、车辆状态信号估计模块M704。本实施例中传感器信号主要包括4个高度传感器信号,前左高度传感器信号S11、前右高度传感器信号S21、后左高度传感器信号S31、后右高度传感器信号S41及3个加速度传感器信号前左加速度传感器信号S12、前右加速度传感器信号S22、后左加速度传感器信号S32。传感器信号处理主要是传感器有效性判定及采用截止频率可调的低通滤波进行降噪处理。CAN信号转换模块M702主要包括方向盘转角信号S13、车速信号S23、侧向加速度信号S33、纵向加速度信号S43、方向盘转速信号S53、侧向加速度信号S63等CAN信号有效性判定及根据车辆动态车身控制系统DBC参数表(偏移、放大因子、限值)进行转换。当传感器信号及CAN信号读取完成,需要根据需求进行信号滤波处理模块M703,该模块滤波处理主要是由于本申请聚焦在车辆操稳性能的提升,所以主要覆盖低频段,采用低截止频率进行低通滤波处理,从而达成高中低分频控制方法设计。车辆状态信号估计模块M704主要包括减振器速度估算、簧下加速度估算、车辆侧倾角估算、车辆俯仰角估算、车辆参数赋值等。
通过信号处理模块M70进行相关信号处理,并将信号传递至主控制方法模块M90。主控制方法模块M90主要包括:稳态侧倾控制模块M901、瞬态侧倾控制模块M902、极限抓地控制模块M903、路面特性影响因子估算模块M904、阻尼力电流转换模块M905。稳态侧倾控制模块M901用于确定稳态侧倾控制阻尼力;瞬态侧倾控制模块M902用于确定瞬态侧倾控制阻尼力;极限抓地控制模块M903用于确定极限抓地控制阻尼力;路面特性影响因子估算模块M904用于确定考虑路面特性影响因子后的目标输出阻尼力;阻尼力电流转换模块M905用于根据减振器逆模型或则根据减振器测试外特性曲线进行查表输出电流值。
其中,如图7所示,瞬态侧倾控制模块M902包括瞬态转向基础阻尼力计算模块M902-1和瞬态转向动态阻尼力Fsb计算模块M902-2。在本实施例中,瞬态转向基础阻尼力计算模块M902-1通过方向盘转角及车速进行Fsb的二维查表计算,得到瞬态转向基础阻尼力。瞬态转向动态阻尼力Fsb计算模块M902-2包括动态鲁棒性提升及上升沿、下降沿分开的方法。经动态鲁棒性处理后得到动态方向盘角速度DynSwaRat,当动态方向盘角速度DynSwaRat与方向盘转角同向时,则判定为方向盘角速度处于上升趋势,则参考车速、方向盘角速度进行上升沿阻尼力Fsu查找;当DynSwaRat与方向盘转角反向时,则判定为方向盘角速度处于下降趋势,则参考车速、方向盘角速度进行下降沿阻尼力Fsd查找,最后将Fsu或Fsd输出作为瞬态转向动态阻尼力Fss。
最后将瞬态转向基础阻尼力Fsb和瞬态转向动态阻尼力Fss进行叠加计算,得到瞬态侧倾控制阻尼力Fs。
本申请第二方面提供一种整车半主动悬架控制系统,如图8所示,所述系统包括:
信号处理单元,用于获取车辆信号并进行解析,得到车辆控制参数;
侧倾控制状态确定单元,用于根据所述车辆控制参数判断当前车辆所属的侧倾控制状态;
稳态侧倾控制阻尼力确定单元,用于在当前车辆属于稳态侧倾控制状态时,根据所述车辆控制参数确定稳态侧倾控制阻尼力;
极限抓地控制状态判断单元,用于在当前车辆属于瞬态侧倾控制状态时,根据所述车辆控制参数确定当前是否处于极限抓地控制状态;
瞬态侧倾控制阻尼力确定单元,用于在当前车辆属于瞬态侧倾控制状态且不处于极限抓地控制状态时,根据所述车辆控制参数确定瞬态侧倾控制阻尼力;
极限抓地控制阻尼力确定单元,用于在当前车辆处于极限抓地控制状态时,根据所述车辆控制参数确定极限抓地控制阻尼力;
目标电流确定单元,用于根据所述稳态侧倾控制阻尼力、极限抓地控制阻尼力或瞬态侧倾控制阻尼力结合路面特性确定减震器控制目标电流。
通过上述技术手段,该系统在运行时可以根据获取的车辆控制参数来判断当前车辆所属的侧倾控制状态,在控制过程中将侧倾控制状态更详细的分为了稳态侧倾控制状态、瞬态侧倾控制状态以及极限抓地控制状态,根据不同的控制状态确定不同的控制阻尼力,从而得到减震器控制目标电流,控制场景更丰富,适用性更高。
本申请第三方面提供一种车辆,所述车辆采用所述的整车半主动悬架控制方法计算减震器控制目标电流。
本申请还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的整车半主动悬架控制方法。
虽然本申请结合有限数量的实例进行了详细描述,但是应当容易理解的式,本申请并不限于这些公开的实施例。相反,本申请可以被修改以结合此前未描述的任意数量的变化、改变、替代或等价的方法,但是其与本申请的精神和范围相当。此外,虽然本申请的多个实施例被描述,但是应当理解的是,本申请的多个方面可以仅包括所描述实施例中的一些。此外,本申请不应被看作受前面描述的限制。
- 整车半主动悬架系统集成控制方法和系统
- 一种车辆半主动悬架控制方法、装置、车辆和介质