一种基于预测权重的轨道转弯识别方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明属于图像识别技术领域,涉及一种基于预测权重的轨道转弯识别方法。
背景技术
近年来,随着轨道交通建设规划的实施,轨道交通、客运专线建设正在高速发展,为了实现更快的人员来往、物资运输,列车运行速度也在不断提高,同时为了保障列车运行的安全,对轨道车辆及运营设备的要求也越来越高。在正常运行时,列车设备上安装有列车运行自动防护系统(ATP)进行安全自动防护。但对于铁路检修工程车,考虑到运营的特殊性及经济性,并没有安装列车运行自动防护系统装置。尤其是在前方铁轨转弯时,需要人为的判断前方是否有转弯并手动减速,这样大大地降低了效率。而且人不能时时刻刻保持高效率的状态,当司机受施工作业压力、任务繁重等因素影响下,可能会出现处理速度慢,甚至错误处理等危险行为。这就需要提出一种能够实时识别前方铁轨直行还是转弯的方法。
图像识别技术是以图像的主要特征为基础的,利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对象的技术。图像识别的基本过程可以分为预处理、特征抽取和选择、分类器设计、分类决策等。因此通过图像识别技术对铁轨弯道进行识别是一种有效的方法。
关于铁轨弯道识别的技术前人也提出过许多方法。经过现有的文献检索发现,申请号为201210080391的专利,专利名称为:一种轨道识别方法,该方法包括“安装视频采集装置;摄像头采集图像,并输入数据处理装置;确定感兴趣的区域,至少包括图像中的轨道;进行预处理得到轨道的轮廓点;采用Hough变换对轮廓点进行处理,分别得到两条待拟合的直线的斜率;对上述两条待拟合直线进行拟合;识别轨道;计算轨道上每点到火车的距离;判断前方是否有弯道。”申请号为201410546719的专利,专利名称为:一种轨道最小曲率半径的图像识别方法,该方法包括“通过摄像装置获取目标图像;对目标图像进行直方图均衡化预处理;对均衡化图像构建区域生长模型,确定相似性准则,确定生长停止条件;将铁轨模型进行曲线拟合,得到铁轨识别图像;判断前方是否有转弯”上述两个专利,都对铁轨进行了预处理和曲线拟合,但是存在一些问题:第一预处理方法较为简单,识别效果不佳;第二曲线拟合的效果其实在实际当中不是非常好,存在许多干扰噪声,包括铁路的多轨道、树木等因素;第三在实时摄像中,相邻两帧图像之间的信息是非常相似的,而许多现有方法忽略了相邻两帧图像的特征点信息。
发明内容
为了解决现有轨道识别的难题,本发明的目的是提出一种基于预测权重的轨道转弯识别方法,能够准确识别前方轨道是直行还是转弯,从而及时地进行语音报警。
本发明的技术方案是:一种基于预测权重的轨道转弯识别方法,包括:
(1)通过摄像装置实时捕获工程车前方目标图像
将摄像头固定在工程车驾驶室内,通过摄像装置实时捕获工程车前方目标图像。
(2)确定ROI(Region Of interest)区域
图像识别首先需要对感兴趣的区域进行操作,过滤掉不感兴趣的区域。识别对象是轨道,因此ROI区域是两条轨道,同时考虑到离摄像头最近的轨道在直行或转弯时都是相同的,只有在远处才有区别,因此ROI区域为图2和图3目标图像中的小方框S区域。
(3)对ROI区域内的目标图像采用直方图均衡化,进行图像增强
对铁轨转弯进行分析判断不需要彩色图像信息,否则会降低运算速率,需要先对其进行灰度化。其次当原始图像的灰度分布在某一段狭窄的区间中时,如白天太阳光较强导致灰度分布在较高亮度的区间,或是阴天太阳光较弱导致灰度分布在较低亮度的区间,造成图像不够清晰、识别率降低,这时需要运用直方图均衡进行图像增加,将灰度分布较为平衡地延展到0到255区间上,使得图像的对比度增强,使图像更清晰有利于后续的识别分类。
(4)采用改进的Sobel变换对目标图像进行边缘检测
若要得到铁轨的轨迹,必须进行边缘检测,这里采用改进的Sobel算子与目标图像进行卷积,并用无穷范数表示梯度值。对于铁路而言,从摄像头角度去看两条铁轨在远处汇聚成一点,且估算出直线角度在60°附近,除了用90°普通的Sobel模版,还可以用改进的45°和135°模版。考虑到铁轨上的枕木是水平直线段,其边缘也会被检测出来,导致后续Hough变换会检测出许多水平直线,作为无效直线会对铁轨的识别产生一定的影响,因此不考虑0°模版。边缘检测有具体的3×3梯度模版如图4所示。
假设某3×3模版的原图像F(x,y)为:
将三种Sobel算子分别与上述原图像作卷积得:
S
S
S
将综合梯度值用无穷范数表示:
此时得到的G(x,y)为边缘检测后的图像。
(5)采用改进的Bernsen算法对边缘检测的图像进行二值化
在Hough变换检测直线前需要对图像进行二值化处理,而普通的处理方法是对上述Sobel变换后的图像进行人工设置阈值方法,即超过某一门限值则设置为255,未超过则设置为0,这样提取的边缘效果较差。而Bernsen算法作为一种局部二值化算法是将图像分割成块,然后分别计算阈值,通过比较选出最佳阈值。一般算法通常会忽略扫描框对周边像素的阈值选取,从而造成边缘断点或缺失,因此该方法可以抑制不均匀光照给图像带来的影响。假设G(x,y)为原始图像,且窗口大小为(2w+1)*(2w+1),w是像素宽度,则该窗口下的阈值T
其中i,j表示步长,x+i,y+j表示像素点位置。
由普通Bernsen算法得到的图像容易受制于噪声的干扰,导致与预期图像有一定偏差,因此采用改进的Bernsen算法,结合高斯滤波和中值滤波对结果进行线性组合。
假设高斯滤波器模版为H
K
经高斯滤波后的Bernsen阈值T
假设中值波器模版为H
K
经高斯滤波后的Bernsen阈值T
由上述三种Bernsen算法线性组合确定最佳阈值T(x,y)为:
T(x,y)=(1-a-b)T
试中0 表1改进Bernsen算法不同a,b线性组合下的最终铁轨弯道识别率(%)
由表1可以发现当a=0.5,b=0.3时,最终识别率是最高的,因此本发明选择这两个参数作为最终的系数。 确定了最佳阈值后,再与原图像G(x,y)进行比较,若G(x,y)比阈值小则标为背景像素取0,若比阈值大则标为目标像素取1;
由上式得到B(x,y)就是预处理阶段结束的二值化图像。 (6)采用基于预测权重的Hough变换对图像进行处理 目标图像的预处理阶段结束后,需要检测铁轨相关直线段,而检测直线比较好的方法就是通过Hough变换,但仅仅通过Hough变换检测的直线每次都会有一定的差别从而导致识别率下降,考虑到摄像头实时采集图像而视频图像前后帧的相似度非常高,因此可以将前一帧图像中的特征点部分映射到下一帧图像里。将二值化图像经Hough变换后得到ρ,θ极坐标图像,在该坐标中每个点代表二值化图像中的一条直线,点越密集表示检测到同一条直线越多。基于预测权重的Hough变换就是将前一幅极坐标下的值取c%,加到下一幅极坐标下,再进行归一化。 表2不同预测权重的百分比c下的最终铁轨弯道识别率(%)
由表2可以得出,当c=40时弯道识别率是最高的,因此基于预测权重的占比为40%是最优的。 (7)统计所有经过轨道中心点直线的比重,判断铁轨是直行还是转弯 最后一步,经过Hough变换后的图像,一般是判断极坐标下最密集的两个点作为两条铁轨,并进行曲线拟合或构建区域生长模型。但是会出现两个问题:其一,当出现多轨道问题时,得到的很有可能是其他轨道的直线;其二,在弯道的处理上,曲线拟合和构建区域生长模型效果不是很好。 而本方案是先从极坐标下选择最密集的前100个点,代表100条直线,由于直行的铁轨每次都相交于远处同一点,将该点作为中心点,统计经过中心点附近的直线,根据其占所有100条直线的比重判断铁轨时直行还是转弯。该方法的优势在于:第一,多轨道情形下识别率较高,当铁轨直行时其他轨道大多数是直行的,当铁轨转弯时其他轨道大多数是转弯的,这样相应的比重会增加提高了结果的正确性,多轨道情形如图3所示;第二,不需要拟合弯道的曲线,降低了因拟合失败导致的误判。 考虑到靠近摄像头附近的直线段铁轨对比重产生较大的影响,因此与前面第(2)部分“ROI区域的选择”相呼应,选择中间方框内的区域。 具体的实现方法如下所示: 假设中心点的笛卡尔坐标为(x cosθ 根据点到直线的方程:
(假设直线为ax+by+c=0,中心点为(x 可推导出轨道中心点到该直线的距离为:
对于512×512像素,当d
将本发明算法与背景技术里两个算法作对比,识别率如表3所示。 表3不同算法下的最终铁轨弯道识别率(%)
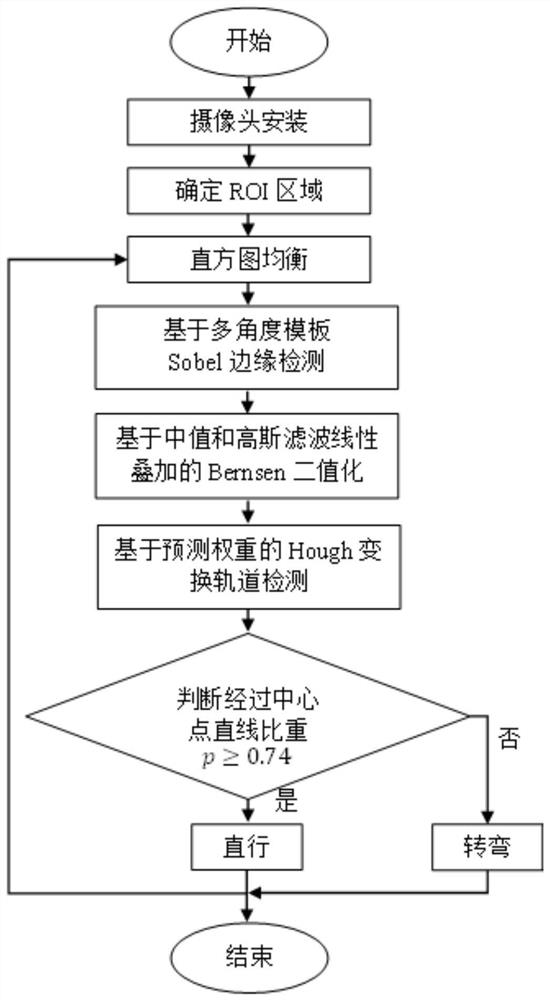
由表3可看出,本发明算法下的铁轨弯道识别率比另外两种识别率要高,更有效地识别前方轨道并提醒司机,使司机做出正确地判断。 本发明的有益效果为,本发明对于轨道弯道的检测率较高,且适用于多轨道场景。更有效地识别前方轨道并提醒司机,使司机做出正确地判断,为列车运行提供更好的保障。 附图说明 图1为本发明中总体实施方案流程框图; 图2为本发明中单轨道下直行轨道和转弯轨道的ROI区域图; 图3为本发明中多轨道下直行轨道和弯道轨道的ROI区域图; 图4为本发明中45度、90度和135度的Sobel模版图。 具体实施方式 下面结合附图和实施例对本发明进行详细描述,以便本领域的技术人员能够更好地理解本发明。 实施例1 如图1所示,本发明提出了一种基于预测权重的轨道转弯识别方法,主要包括以下步骤: 步骤1、通过摄像装置实时捕获工程车前方目标图像。将摄像头固定在工程车驾驶室内,正前方对准铁轨的中心区域,使直行铁轨的交汇处大致在摄像区域正中心,并通过USB连接到主控设备(电脑),通过摄像装置实时捕获工程车前方目标图像,并将图像的像素大小设置为512×512。 步骤2,获取目标图像的ROI区域。从步骤1获得前方目标图像后,图像识别首先需要对感兴趣的区域进行操作,过滤掉不感兴趣的区域。识别对象是轨道,因此ROI区域是两条轨道,同时考虑到离摄像头最近的一条轨道在直行或转弯时都是相同的,只有在远处中心点附近才有区别,因此选择目标图像中的小方框区域为ROI区域,如图2和图3中的S区域所示。对于图2单轨道情形下的ROI区域,显示有一条轨道;而对于图3多轨道情形下的ROI区域,显示有多条轨道,因此在此条件下仅仅通过拟合方法难以区分。 步骤3,对ROI区域内的目标图像采用直方图均衡化,进行图像增强。对铁轨转弯进行分析判断不需要彩色图像信息,否则会降低运算速率,需要先对其进行灰度化。其次当原始图像的灰度分布在某一段狭窄的区间中时,如白天太阳光较强导致灰度分布在较高亮度的区间,或是阴天太阳光较弱导致灰度分布在较低亮度的区间,造成图像不够清晰、识别率降低,这时需要运用直方图均衡进行图像增加,将灰度分布较为平衡地延展到0到255区间上,使得图像的对比度增强,使图像更清晰有利于后续的识别分类。因此对步骤2中的ROI区域进行灰度化,再进行直方图均衡,增强图像的对比度。 步骤4,采用基于多角度模板的Sobel变换对目标图像进行边缘检测。若要得到铁轨的轨迹,必须进行边缘检测,这里采用改进的Sobel算子与目标图像进行卷积,并用无穷范数表示梯度值。对于铁路而言,从摄像头角度去看两条铁轨在远处汇聚成一点,且估算出直线角度在60°附近,除了用90°普通的Sobel模版,还可以用改进的45°和135°模版。考虑到铁轨上的枕木是水平直线段,其边缘也会被检测出来,导致后续Hough变换会检测出许多水平直线,作为无效直线会对铁轨的识别产生一定的影响,因此不考虑0°模版。只考虑45°、90°、135°模板,将原图像F(x,y)分别与这三种模板进行卷积,并通过无穷范数得到边缘检测后的G(x,y)图像。 步骤5,采用基于中值和高斯滤波线性叠加的Bernsen算法对边缘检测的图像进行二值化。由步骤4得到的边缘检测图像需要对其进行二值化处理,有利于后面Hough变换的直线检测。Bernsen算法作为一种局部二值化算法是将图像分割成块,然后分别计算阈值,通过比较选出最佳阈值。一般算法通常会忽略扫描框对周边像素的阈值选取,从而造成边缘断点或缺失,因此该方法可以抑制不均匀光照给图像带来的影响。但是普通Bernsen算法容易受制于噪声的干扰,导致与预期图像有一定偏差,因此采用改进的Bernsen算法,结合高斯滤波和中值滤波对结果进行线性叠加。 将步骤4得到的G(x,y)图像通过高斯滤波和中值滤波分别得到滤波后的图像K 步骤6,采用基于预测权重的Hough变换对图像进行处理。目标图像的预处理阶段结束后,需要检测铁轨相关直线段,而检测直线比较好的方法就是通过Hough变换,但仅仅通过Hough变换检测的直线每次都会有一定的差别从而导致识别率下降,考虑到摄像头实时采集图像而视频图像前后帧的相关性非常高,可以将前一帧图像中的特征点部分映射到下一帧图像里。因此这里将步骤5得到的二值化图像经Hough变换后得到ρ,θ极坐标图像,在该坐标中每个点代表二值化图像中的一条直线,点越密集表示检测到同一条直线越多。基于预测权重的Hough变换就是将前一幅极坐标下的值取40%,加到下一幅极坐标下,再进行归一化即得到变换后的极坐标图像。 步骤7,统计所有经过轨道中心点直线的比重,判断铁轨是直行还是转弯。先从步骤6得到的极坐标图像中选择最密集的前100个点,代表100条直线,由于直行的铁轨每次都相交于远处同一点,将该点作为中心点,统计经过中心点附近的直线,根据其占所有100条直线的比重判断铁轨时直行还是转弯。该方法的优势在于:第一,多轨道情形下识别率较高,当铁轨直行时其他轨道大多数是直行的,当铁轨转弯时其他轨道大多数是转弯的,这样相应的比重会增加提高了结果的正确性,多轨道情形如图3所示;第二,不需要拟合弯道的曲线,降低了因拟合失败导致的误判。根据中心点到各条直线的距离d 本发明采用基于多角度模板的Sobel变换进行边缘检测,采用基于中值和高斯滤波线性叠加的Bernsen算法进行二值化,使得生成的二值图像具有更多的铁轨信息,更少的噪声信息。采用基于预测权重的Hough变换检测直线,使得相邻两幅图像具有更强的相关性。最后统计所有经过轨道中心点直线的比重,判断轨道是直行还是转弯,该方法在多轨道场景下的效果更为明显。
- 一种基于预测权重的轨道转弯识别方法
- 一种基于方向预测的车道线轨道线识别方法及系统