一种基于人工智能物流转运用搬运车
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及搬运车领域,具体的说是一种基于人工智能物流转运用搬运车。
背景技术
搬运车即起搬运货物作用的物流搬运设备。手动托盘搬运车在搬运站使用时将其承载的货叉插入托盘孔内,由人力驱动液压系统来实现托盘货物的起升和下降,并由人力拉动完成搬运作业,它是搬运站托盘运输工具中最简便、最有效、最常见的装卸、搬运工具。
现有的搬运车大多通过货叉对货物进行支撑,货叉承载的货物数量存在限制,当需要搬运大量的货物时,需要反复的使用运输车进行搬运,无法快速的将大量货物搬运到需要的平台上,且现有的搬运车在搬运货物时,需要使用货架对货物进行支撑才可通过货叉将货物抬起,搬运货物时需要首先将货物防止在货架上较为麻烦。
发明内容
针对现有技术中的搬运车大多通过货叉对货物进行支撑,货叉承载的货物数量存在限制,当需要搬运大量的货物时,需要反复的使用运输车进行搬运,无法快速的将大量货物搬运到需要的平台上,且现有的搬运车在搬运货物时,需要使用货架对货物进行支撑才可通过货叉将货物抬起,搬运货物时需要首先将货物防止在货架上较为麻烦的问题,本发明提供了一种基于人工智能物流转运用搬运车。
本发明解决其技术问题所采用的技术方案是:一种基于人工智能物流转运用搬运车,包括底座,所述底座的内部设置有驱动机构,所述底座的内部设置有升降机构,所述升降机构的上端设置有转动机构,所述转动机构的上表面上设置有推动机构,所述底座的一侧侧壁上设置有挂接机构,所述底座的底部固定连接有多个万向轮;所述驱动机构包括安装槽、固定板、第一电机、第一转轴、第一锥齿轮、第二锥齿轮、第二转轴、转孔,所述安装槽开设在底座的内部,所述安装槽的内部固定连接有固定板,所述固定板的下表面上固定连接有第一电机,所述第一电机的输出端固定连接有第一转轴,所述第一转轴的上端固定连接有第一锥齿轮,所述第一锥齿轮的两端分别与两个第二锥齿轮相啮合,两个所述第二锥齿轮的一侧侧壁上均固定连接有第二转轴,两个所述第二转轴分别插接在两个转孔内部,两个所述转孔分别开设在安装槽的两端侧壁上。
具体的,所述升降机构包括圆槽、螺纹杆、环槽、第三锥齿轮、第四锥齿轮、第一螺孔、第一移动块、升降板,两个所述圆槽分别开设在底座的两端上表面上,两个所述圆槽的内部均转动连接有螺纹杆,两个所述圆槽的内壁上均开设有环槽,两个所述螺纹杆位于环槽内部的表面上均固定套接有第三锥齿轮,两个所述第三锥齿轮分别与两个第四锥齿轮相啮合,两个所述螺纹杆的上端分别螺纹连接在两个第一螺孔内部,两个所述第一螺孔分别开设在两个第一移动块的表面上,两个所述第一移动块分别固定连接在升降板的两端侧壁上。
具体的,所述转动机构包括固定柱、插槽、插条、第一通孔、第二通孔、驱动齿轮、环形齿条、卡环、转板、圆柱、第一轴承,所述固定柱固定连接在第一锥齿轮的上表面上,所述固定柱的上端开设有插槽,所述插槽的内部插接有相匹配的插条,所述固定柱插接在第一通孔内部,所述第一通孔开设在安装槽内部与底座外部相连通,所述固定柱的上端插接在第二通孔内部,所述第二通孔开设在升降板的下表面上,所述插条的上端固定连接有驱动齿轮,所属驱动齿轮与环形齿条相啮合,所述环形齿条的下端固定连接有卡环,所述环形齿条的上端固定连接有转板,所述转板的下表面中心处固定连接有圆柱,所述圆柱通过第一轴承转动连接在升降板的上表面中心处。
具体的,所述推动机构包括移动槽、第二电机、第一螺杆、第三通孔、第二轴承、第二螺孔、第二移动块、推板,所述移动槽开设在转板的上表面上,所述转板的一端侧壁上固定连接有第二电机,所述第二电机的输出端固定连接有第一螺杆,所述第一螺杆的另一端贯穿第三通孔,所述第三通孔开设在移动槽的内壁上,所述第一螺杆通过第二轴承转动连接在移动槽的内壁上,所述第一螺杆螺纹连接在第二螺孔内部,所述第二螺孔开设在第二移动块的表面上,所述第二移动块的上端固定连接有推板。
具体的,所述挂接机构包括滑槽、第三轴承、第二螺杆、螺纹筒、固定块、挂孔、第四通孔、转槽、固定轴、转动杆、U形夹块,所述滑槽开设在底座的一端侧壁上,所述滑槽的底部通过第三轴承转动连接有第二螺杆,所述第二螺杆的表面上螺纹连接有螺纹筒,所述螺纹筒的外壁上固定连接有固定块,所述固定块的表面上开设有挂孔,所述第二螺杆的上端贯穿第四通孔延伸至底座的上端,所述第二螺杆的上端开设有转槽,所述转槽的内部固定连接有固定轴,所述固定轴的表面上转动连接有转动杆,所述转动杆卡接在U形夹块内部,所述U形夹块固定连接在底座的上表面上。
具体的,所述第一电机与第二电机均与控制器电性连接。
具体的,两个所述第四锥齿轮分别固定连接在两个第二转轴的表面上。
具体的,所述驱动齿轮的下表面与卡环的上表面卡接。
本发明的有益效果:
(1)本发明所述的一种基于人工智能物流转运用搬运车,通过第一电机带动第一转轴转动,第一转轴转动时带动第一锥齿轮转动,第一锥齿轮转动时带动两个第二锥齿轮转动,两个第二锥齿轮嗲懂两个第二转轴转动,第二转轴转动时带动第四锥齿轮转动,第四锥齿轮带动第三锥齿轮转动,第三锥齿轮转动时带动螺纹杆转动,螺纹杆转动时表面的螺纹挤压第一螺孔内壁上的螺纹,进而使第一螺孔稳定上移,第一螺孔带动第一移动块上移,第一移动块上移时带动升降板上移,升降板带动转板移动,转板可以带动大量的货物移动。
(2)本发明所述的一种基于人工智能物流转运用搬运车,通过第二电机带动第一螺杆转动,第一螺杆转动时挤压第二螺孔的内壁,进而使第二螺孔带动第二移动块移动,第二移动块移动时带动推板移动,通过推板带动推动转板上的货物向平台移动,进而方边将货物搬运到运输平台上。
(3)本发明所述的一种基于人工智能物流转运用搬运车,通过第一锥齿轮转动时带动固定柱转动,固定柱转动时带动插槽转动,插槽带动插条转动,插条带动驱动齿轮转动,驱动齿轮带动环形齿条转动,环形齿条带动转板转动,当环形齿条上移时带动卡环上移,卡环带动驱动齿轮同步上移,进而使升降板上移时转板同步旋转,进而使转板与运输平台对正方便卸下货物。
附图说明
下面结合附图和实施例对本发明进一步说明。
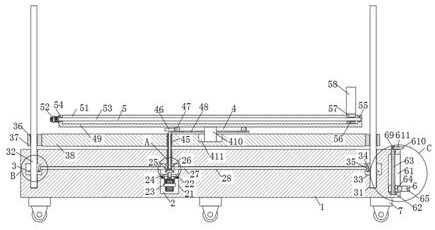
图1为本发明提供的一种基于人工智能物流转运用搬运车的结构示意图;
图2为本发明提供的一种基于人工智能物流转运用搬运车图1中A部分放大图;
图3为本发明提供的一种基于人工智能物流转运用搬运车图1中B部分放大图;
图4为本发明提供的一种基于人工智能物流转运用搬运车图1中C部分放大图;
图5为本发明提供的一种基于人工智能物流转运用搬运车的插条结构示意图;
图6为本发明提供的一种基于人工智能物流转运用搬运车的固定柱俯视结构示意图;
图7为本发明提供的一种基于人工智能物流转运用搬运车的卡环结构示意图。
图中:1、底座;2、驱动机构;21、安装槽;22、固定板;23、第一电机;24、第一转轴;25、第一锥齿轮;26、第二锥齿轮;27、第二转轴;28、转孔;3、升降机构;31、圆槽;32、螺纹杆;33、环槽;34、第三锥齿轮;35、第四锥齿轮;36、第一螺孔;37、第一移动块;38、升降板;4、转动机构;41、固定柱;42、插槽;43、插条;44、第一通孔;45、第二通孔;46、驱动齿轮;47、环形齿条;48、卡环;49、转板;410、圆柱;411、第一轴承;5、推动机构;51、移动槽;52、第二电机;53、第一螺杆;54、第三通孔;55、第二轴承;56、第二螺孔;57、第二移动块;58、推板;6、挂接机构;61、滑槽;62、第三轴承;63、第二螺杆;64、螺纹筒;65、固定块;66、挂孔;67、第四通孔;68、转槽;69、固定轴;610、转动杆;611、U形夹块;7、万向轮。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1-图5所示,本发明所述的一种基于人工智能物流转运用搬运车,包括底座1,底座1的内部设置有驱动机构2,底座1的内部设置有升降机构3,升降机构3的上端设置有转动机构4,转动机构4的上表面上设置有推动机构5,底座1的一侧侧壁上设置有挂接机构6,底座1的底部固定连接有多个万向轮7;驱动机构2包括安装槽21、固定板22、第一电机23、第一转轴24、第一锥齿轮25、第二锥齿轮26、第二转轴27、转孔28,安装槽21开设在底座1的内部,安装槽21的内部固定连接有固定板22,固定板22的下表面上固定连接有第一电机23,第一电机23的输出端固定连接有第一转轴24,第一转轴24的上端固定连接有第一锥齿轮25,第一锥齿轮25的两端分别与两个第二锥齿轮26相啮合,两个第二锥齿轮26的一侧侧壁上均固定连接有第二转轴27,两个第二转轴27分别插接在两个转孔28内部,两个转孔28分别开设在安装槽21的两端侧壁上,启动第一电机23带动第一转轴24转动,第一转轴24转动时带动第一锥齿轮25转动,第一锥齿轮25转动时带动两个第二锥齿轮26转动,两个第二锥齿轮26带动两个第二转轴27转动,第二转轴27转动时带动第四锥齿轮35转动。
具体的,升降机构3包括圆槽31、螺纹杆32、环槽33、第三锥齿轮34、第四锥齿轮35、第一螺孔36、第一移动块37、升降板38,两个圆槽31分别开设在底座1的两端上表面上,两个圆槽31的内部均转动连接有螺纹杆32,两个圆槽31的内壁上均开设有环槽33,两个螺纹杆32位于环槽33内部的表面上均固定套接有第三锥齿轮34,两个第三锥齿轮34分别与两个第四锥齿轮35相啮合,两个螺纹杆32的上端分别螺纹连接在两个第一螺孔36内部,两个第一螺孔36分别开设在两个第一移动块37的表面上,两个第一移动块37分别固定连接在升降板38的两端侧壁上,第四锥齿轮35带动第三锥齿轮34转动,第三锥齿轮34转动时带动螺纹杆32转动,螺纹杆32转动时表面的螺纹挤压第一螺孔36内壁上的螺纹,进而使第一螺孔36稳定上移,第一螺孔36带动第一移动块37上移,第一移动块37上移时带动升降板38上移。
具体的,转动机构4包括固定柱41、插槽42、插条43、第一通孔44、第二通孔45、驱动齿轮46、环形齿条47、卡环48、转板49、圆柱410、第一轴承411,固定柱41固定连接在第一锥齿轮25的上表面上,固定柱41的上端开设有插槽42,插槽42的内部插接有相匹配的插条43,固定柱41插接在第一通孔44内部,第一通孔44开设在安装槽21内部与底座1外部相连通,固定柱41的上端插接在第二通孔45内部,第二通孔45开设在升降板38的下表面上,插条43的上端固定连接有驱动齿轮46,所属驱动齿轮46与环形齿条47相啮合,环形齿条47的下端固定连接有卡环48,环形齿条47的上端固定连接有转板49,转板49的下表面中心处固定连接有圆柱410,圆柱410通过第一轴承411转动连接在升降板38的上表面中心处,第一锥齿轮25转动时带动固定柱41转动,固定柱41转动时带动插槽42转动,插槽42带动插条43转动,插条43带动驱动齿轮46转动,驱动齿轮46带动环形齿条47转动,环形齿条47带动转板49转动,当环形齿条47上移时带动卡环48上移,卡环48带动驱动齿轮46同步上移,进而使升降板38上移时转板49同步旋转。
具体的,推动机构5包括移动槽51、第二电机52、第一螺杆53、第三通孔54、第二轴承55、第二螺孔56、第二移动块57、推板58,移动槽51开设在转板49的上表面上,转板49的一端侧壁上固定连接有第二电机52,第二电机52的输出端固定连接有第一螺杆53,第一螺杆53的另一端贯穿第三通孔54,第三通孔54开设在移动槽51的内壁上,第一螺杆53通过第二轴承55转动连接在移动槽51的内壁上,第一螺杆53螺纹连接在第二螺孔56内部,第二螺孔56开设在第二移动块57的表面上,第二移动块57的上端固定连接有推板58,启动第二电机52,通过第二电机52带动第一螺杆53转动,第一螺杆53转动时挤压第二螺孔56的内壁,进而使第二螺孔56带动第二移动块57移动,第二移动块57移动时带动推板58移动,通过推板58带动推动转板49上的货物向平台移动,进而方边将货物搬运到运输平台上。
具体的,挂接机构6包括滑槽61、第三轴承62、第二螺杆63、螺纹筒64、固定块65、挂孔66、第四通孔67、转槽68、固定轴69、转动杆610、U形夹块611,滑槽61开设在底座1的一端侧壁上,滑槽61的底部通过第三轴承62转动连接有第二螺杆63,第二螺杆63的表面上螺纹连接有螺纹筒64,螺纹筒64的外壁上固定连接有固定块65,固定块65的表面上开设有挂孔66,第二螺杆63的上端贯穿第四通孔67延伸至底座1的上端,第二螺杆63的上端开设有转槽68,转槽68的内部固定连接有固定轴69,固定轴69的表面上转动连接有转动杆610,转动杆610卡接在U形夹块611内部,U形夹块611固定连接在底座1的上表面上,转动转动杆610带动固定轴69转动,固定轴69带动第二螺杆63转动,第二螺杆63挤压螺纹筒64的内部,进而使螺纹筒64上下移动,螺纹筒64带动固定块65移动,固定块65带动挂孔66上下移动,进而使挂孔66与牵引车上的挂钩卡接固定,然后将转动杆610卡接在U形夹块611内部,对第二螺杆63进行固定,进而使挂孔66与牵引车牢固固定。
具体的,第一电机23与第二电机52均与控制器电性连接,控制器为YS—SIL型智能电机控制器。
具体的,两个第四锥齿轮35分别固定连接在两个第二转轴27的表面上,进而通过两个第二转轴27带动两个第四锥齿轮35转动。
具体的,驱动齿轮46的下表面与卡环48的上表面卡接,进而通过卡环48嗲懂驱动齿轮46一直与环形齿条47相啮合。
在使用时,首先将货物放置在转板49上,然后转动转动杆610带动固定轴69转动,固定轴69带动第二螺杆63转动,第二螺杆63挤压螺纹筒64的内部,进而使螺纹筒64上下移动,螺纹筒64带动固定块65移动,固定块65带动挂孔66上下移动,进而使挂孔66与牵引车上的挂钩卡接固定,然后将转动杆610卡接在U形夹块611内部,对第二螺杆63进行固定,进而使挂孔66与牵引车牢固固定,然后启动第一电机23带动第一转轴24转动,第一转轴24转动时带动第一锥齿轮25转动,第一锥齿轮25转动时带动两个第二锥齿轮26转动,两个第二锥齿轮26带动两个第二转轴27转动,第二转轴27转动时带动第四锥齿轮35转动,第四锥齿轮35带动第三锥齿轮34转动,第三锥齿轮34转动时带动螺纹杆32转动,螺纹杆32转动时表面的螺纹挤压第一螺孔36内壁上的螺纹,进而使第一螺孔36稳定上移,第一螺孔36带动第一移动块37上移,第一移动块37上移时带动升降板38上移,第一锥齿轮25转动时带动固定柱41转动,固定柱41转动时带动插槽42转动,插槽42带动插条43转动,插条43带动驱动齿轮46转动,驱动齿轮46带动环形齿条47转动,环形齿条47带动转板49转动,当环形齿条47上移时带动卡环48上移,卡环48带动驱动齿轮46同步上移,进而使升降板38上移时转板49同步旋转,当转板49与平台对正后,启动第二电机52,通过第二电机52带动第一螺杆53转动,第一螺杆53转动时挤压第二螺孔56的内壁,进而使第二螺孔56带动第二移动块57移动,第二移动块57移动时带动推板58移动,通过推板58带动推动转板49上的货物向平台移动,进而方边将货物搬运到运输平台上。
本发明的有益效果:
(1)本发明所述的一种基于人工智能物流转运用搬运车,通过第一电机带动第一转轴转动,第一转轴转动时带动第一锥齿轮转动,第一锥齿轮转动时带动两个第二锥齿轮转动,两个第二锥齿轮嗲懂两个第二转轴转动,第二转轴转动时带动第四锥齿轮转动,第四锥齿轮带动第三锥齿轮转动,第三锥齿轮转动时带动螺纹杆转动,螺纹杆转动时表面的螺纹挤压第一螺孔内壁上的螺纹,进而使第一螺孔稳定上移,第一螺孔带动第一移动块上移,第一移动块上移时带动升降板上移,升降板带动转板移动,转板可以带动大量的货物移动。
(2)本发明所述的一种基于人工智能物流转运用搬运车,通过第二电机带动第一螺杆转动,第一螺杆转动时挤压第二螺孔的内壁,进而使第二螺孔带动第二移动块移动,第二移动块移动时带动推板移动,通过推板带动推动转板上的货物向平台移动,进而方边将货物搬运到运输平台上。
(3)本发明所述的一种基于人工智能物流转运用搬运车,通过第一锥齿轮转动时带动固定柱转动,固定柱转动时带动插槽转动,插槽带动插条转动,插条带动驱动齿轮转动,驱动齿轮带动环形齿条转动,环形齿条带动转板转动,当环形齿条上移时带动卡环上移,卡环带动驱动齿轮同步上移,进而使升降板上移时转板同步旋转,进而使转板与运输平台对正方便卸下货物。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种基于人工智能物流转运用搬运车
- 一种基于物流搬运用的便捷式工具