基于深度特征融合的yolov5-segnet绝缘子串轮廓提取方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及深度学习图像处理领域,具体是基于深度特征融合的yolov5-segnet绝缘子串轮廓提取方法。
背景技术
绝缘子是输电线路中固定载流导体、防止电流回地的重要组件,然而其长期受 到环境侵蚀,很容易出现破碎或脱落的安全隐患,引发严重后果造成巨大的经 济损失和人员伤亡;因此对绝缘子的定期检测和及时维修显得格外重要。 随着经济和技术的不断发展以及“智能电网”概念的提出,电网的巡检也从传 统的人工巡检发展为直升机、无人机的电力巡检;在此技术背景下,无人机或 直升机通过搭载多模态相机采集输电线路中绝缘子可见、红外或紫外图像,基 于深度学习的图像处理技术通过对图像特性进行分析,实现输电系统和设备的 智能检测,大大提高了巡检的效率和准确性。
目前基于深度学习的绝缘子自爆故障的检测方法,陈庆,闫斌等“航拍绝缘子卷积神经网络检测及自爆识别研究”(电子测量与仪器学报,2017)提出一种基于 改进的Fast-RCNN算法进行航拍绝缘子检测及自爆故障识别;陈文贺,李彩林, 袁斌等“有效的绝缘子自爆缺陷定位方法”(电子与信息学报,2020)提出一种 基于深度学习的绝缘子自爆故障检测方法,首先使用SSD算法对航拍图像中绝 缘子进行初定位,然后使用双特征约束法和K-means算法进行绝缘子自爆故障 检测。上述基于深度学习的绝缘子目标检测,检测结果均是用矩形框标记绝缘 子区域,存在诸如背景和绝缘子不能准确区分,并且密集分布的绝缘子难以分 离的问题。较难进一步提高故障检测精度。
因此,有相关学者提出特定领域的深度学习定向识别算法,将角度旋转参数引 入轴对齐矩形框中构成定向检测框对航拍图像中任意角度的玻璃绝缘子进行检 测,但究其根本没有改变矩形框输出形式,针对大型长串且有弧度的绝缘子串 不具备普适性,仍会带来巨大的环境干扰,所以,研究一种高精度轮廓提取算 法用于复杂背景下绝缘子串的检测具有重要意义。
发明内容
本发明的目的在于提供基于深度特征融合的yolov5-segnet绝缘子串轮廓提取方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
基于深度特征融合的yolov5-segnet绝缘子串轮廓提取方法,包括如下步骤:
S1、对航拍绝缘子图像集进行预处理,得到预处理后的绝缘子图像集;
S2、在所述预处理后的航拍绝缘子图像集种随机选取m张进行扩充处理,得到 扩充后的航拍绝缘子图像集T
S3、将所述扩充后的航拍绝缘子图像集T中的n幅航拍绝缘子图像进行mask 掩膜标注,将mask掩膜标注的航拍绝缘子图像集作为绝缘子检测的训练集T
S4、构建深度特征融合的yolov5-segnet深度学习网络;
S5、构建测试T
其中,构建深度特征融合的yolov5-segnet深度学习网络包括如下步骤:
S4.1、针对yolov5目标检测网络的池化层进行改进,首先将原本的max pooling替换成动态k max pooling,得到改进后的yolov5目标检测网络;
S4.2、搭建语义分割网络,在yolov5输出特征图的基础上,提取目标特征,进 行卷积和上采样操作,分别在13*13的输出特征图上提出特征目标后进行两次 3*3卷积和2倍上采样,在26*26的输出特征图上提取特征目标后进行一次3*3 卷积和2倍上采样,在52*52的输出特征图上提取特征目标后进行一次3*3卷 积,上述操作是为了统一特征图尺寸,将统一尺寸后的特征图进行concat(张 量拼接),输入空间注意力模块精炼特征,之后进行两次3*3卷级,以上操作构 成所述语义分割模块;
由改进后的yolov5目标检测模块结合语义分割模块构成所述的深度特征融合的yolov5-segnet网络;
S4.3、开始训练网络,定义当前迭代次数为μ,并初始化μ=1;最大迭代次数 为μmax;对所述深度特征融合的yolov5-segnet网络中的各层的参数进行第μ 次随机初始化,从而得到第μ次迭代的深度特征融合的yolov5-segnet网络;
S4.4、将所述训练集T
作为本发明进一步的方案,所述训练集T
S4.4.1、第一阶段训练改进后的yolov5目标检测模块,对T
S4.4.2、第二阶段训练语义分割模块,在第一阶段训练结果的基础上利用置信度进行筛选,保留置信度大于0.5的方框图进行抠图形成N
聚类过程如下:
A、设置1个特征图的中心点,每一个中心点对应1个聚类中心;
B、利用公式(1)求出n1中每一个样本与中心点之间的距离d:
公式(1)中,b(xi)、b(yi)为第i个样本的横、纵坐标,c(xi)、c(yi)为第i个中心 点的横、纵坐标;
C、利用公式(2)求出每个样本到中心点距离的均值
D、迭代更新聚类中心,直到聚类中心不再发生变化;
S4.4.3、进行μ次迭代,在每一次迭代之后使用验证集T
与现有技术相比,本发明的有益效果是:通过采用搭建的语义分割模块结合yolov5目标检测模块构成新的深度特征融合的yolov5-segnet深度学习网络,克 服了传统网络针对大型长串绝缘子进行检测时所带来的大量环境干扰的缺陷, 进行航拍绝缘子的轮廓提取,从而有效地为绝缘子缺陷检测排除干扰。
附图说明
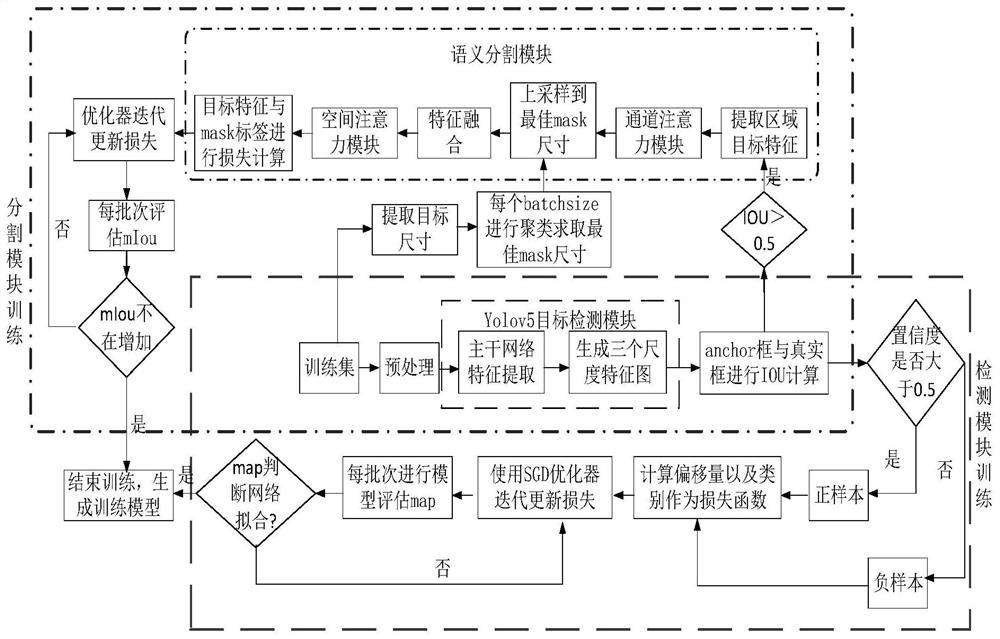
图1为本发明中深度特征融合的yolov5-segnet网络算法的训练流程图。
图2为本发明中语义分割部分流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、 完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部 的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳 动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1和图2,基于深度特征融合的yolov5-segnet绝缘子串轮廓提取方法,包括如下步骤:
S1、对航拍绝缘子图像集进行预处理,检测计算机计算能力是否满足原图像尺 寸大小的计算要求,是否存在抖动模糊等问题,并进行尺寸变换,去抖防噪处 理,得到预处理后的1000张绝缘子图像;
S2、在预处理后的1000张航拍绝缘子图像中随机选取200张作为测试集T
S3、在T
S4、构建深度特征融合的yolov5-segnet深度学习网络;
S4.1、针对yolov5目标检测网络的池化层进行改进,首先将原本的max pooling替换成动态k max pooling,得到改进后的yolov5目标检测网络;
S4.2、搭建语义分割网络,在yolov5输出特征图的基础上,提取目标特征,进 行卷积和上采样操作,分别在13*13的输出特征图上提出特征目标后进行两次 3*3卷积和2倍上采样,在26*26的输出特征图上提取特征目标后进行一次3*3 卷积和2倍上采样,在52*52的输出特征图上提取特征目标后进行一次3*3卷 积,上述操作是为了统一特征图尺寸,将统一尺寸后的特征图进行concat(张 量拼接),输入空间注意力模块精炼特征,之后进行两次3*3卷级,以上操作构 成所述语义分割模块。
由改进后的yolov5目标检测模块结合语义分割模块构成所述的深度特征融合的yolov5-segnet网络。
S4.3、开始训练网络,定义当前迭代次数为μ,并初始化μ=1,最大迭代次数 为μmax,对所述深度特征融合的yolov5-segnet网络中的各层的参数进行第μ 次随机初始化,从而得到第μ次迭代的深度特征融合的yolov5-segnet网络;
S4.4、将所述训练集T
S4.4.1、第一阶段训练改进后的yolov5目标检测模块,对T
S4.4.2、第二阶段训练语义分割模块,在第一阶段训练结果的基础上利用置信度进行筛选,保留置信度大于0.5的方框图进行抠图形成N
聚类过程如下:
A、设置1个特征图的中心点,每一个中心点对应1个聚类中心;
B、利用公式(1)求出N1中每一个样本与中心点之间的距离d:
公式(1)中,b(xi)、b(yi)为第i个样本的横、纵坐标,c(xi)、c(yi)为第i个中心 点的横、纵坐标;
C、利用公式(2)求出每个样本到中心点距离的均值
D、迭代更新聚类中心,直到聚类中心不再发生变化;
S4.4.3、进行μ次迭代,在每一次迭代之后使用验证集T
S5、构建测试T
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗 旨的前提下作出各种变化。
- 基于深度特征融合的yolov5-segnet绝缘子串轮廓提取方法
- 一种基于全色与高光谱图像融合的目标轮廓提取方法