转运设备
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及一种转运设备,特别是涉及一种使用更加方便的转运设备。
背景技术
现有转运设备在夹取待转运的物品时,需通过人工目测的方式观察夹爪与物品的相对位置关系,然后操控转运设备的运动机构,以驱动夹爪执行相应的运动,并使得夹爪移动至设定位置,进而才能利用夹爪抓取住物品。现有转运设备在使用时必须借助人工观察物品与夹爪的相对位置等,造成一定的不便,并导致人工成本较高,且采用人工目测的方式,容易因人为不稳定因素造成目测结果准确度、可靠度较低。
发明内容
鉴于以上所述现有技术的缺点,本发明要解决的技术问题在于提供一种使用更加方便并能节约人工成本的转运设备。
为实现上述目的,本发明提供一种转运设备,包括设备机体、安装在设备机体上的夹爪、及安装在设备机体上的驱动机构,所述驱动机构用于带动夹爪移动,所述设备机体上还安装有工业相机,所述工业相机与控制器电性连接,所述控制器与驱动机构电性连接。
进一步地,所述设备机体上还安装有测距传感器,所述测距传感器与控制器电性连接。
进一步地,所述设备机体包括承载座及安装在承载座上的机架,所述驱动机构、夹爪及工业相机均安装在机架上,所述承载座上设有多个间隔分布的限位块,全部限位块之间形成用于容纳物品的物品存放腔,且所述限位块朝向物品存放腔的一侧壁上设有台阶式的限位部。
进一步地,所述限位块至少有3个,全部限位块沿圆周方向均匀分布。
进一步地,所述设备机体还包括AGV底盘,所述承载座安装在AGV底盘上。
进一步地,所述夹爪有两个,两个夹爪沿左右方向间隔分布,所述驱动机构包括两组安装在设备机体上的直线模组,两组直线模组分别用于驱动两个夹爪沿左右方向移动,且两个直线模组均与控制器电性连接。
进一步地,所述设备机体包括上板及通过回转轴承与上板相连接的下板,所述夹爪安装在下板上,所述驱动机构包括安装在上板上的旋转驱动组件,所述旋转驱动组件能驱动下板绕回转轴承的中心轴线相对于上板旋转,所述旋转驱动组件与控制器电性连接。
进一步地,所述旋转驱动组件包括安装在上板上的旋转电机、安装在旋转电机的输出端的旋转齿轮、及与旋转齿轮相啮合的弧形齿条,所述弧形齿条固定在下板上,所述旋转电机与控制器电性连接。
进一步地,所述设备机体还包括沿前后方向延伸的支撑悬臂,所述上板与支撑悬臂的一端固接,所述夹爪通过沿左右方向延伸的铰接轴与下板活动连接,所述夹爪能绕铰接轴的中心轴线相对于下板转动。
进一步地,所述驱动机构还包括安装在设备机体上的升降驱动组件及与升降驱动组件相连接的平移驱动组件,所述平移驱动组件与支撑悬臂的另一端相连接,所述升降驱动组件能带动平移驱动组件及支撑悬臂沿上下方向移动,所述平移驱动组件能带动支撑悬臂沿前后方向移动。
如上所述,本发明涉及的转运设备,具有以下有益效果:
在抓取物品过程中,本转运设备利用安装在设备机体上的工业相机对待抓取的物品进行拍照,以获取待抓取的物品的位置信息或轮廓大小等信息,并将拍摄信息反馈给控制器,控制器根据获取的信息等,控制驱动机构执行相应的动作,以带动夹爪移动至设定位置,并使得夹爪能准确地抓取住物品,无需人工通过目测的方式获取待抓取物品的相应信息,避免了目测因人为差异带来的不稳定性,且方便了使用,节约了人工成本。
附图说明
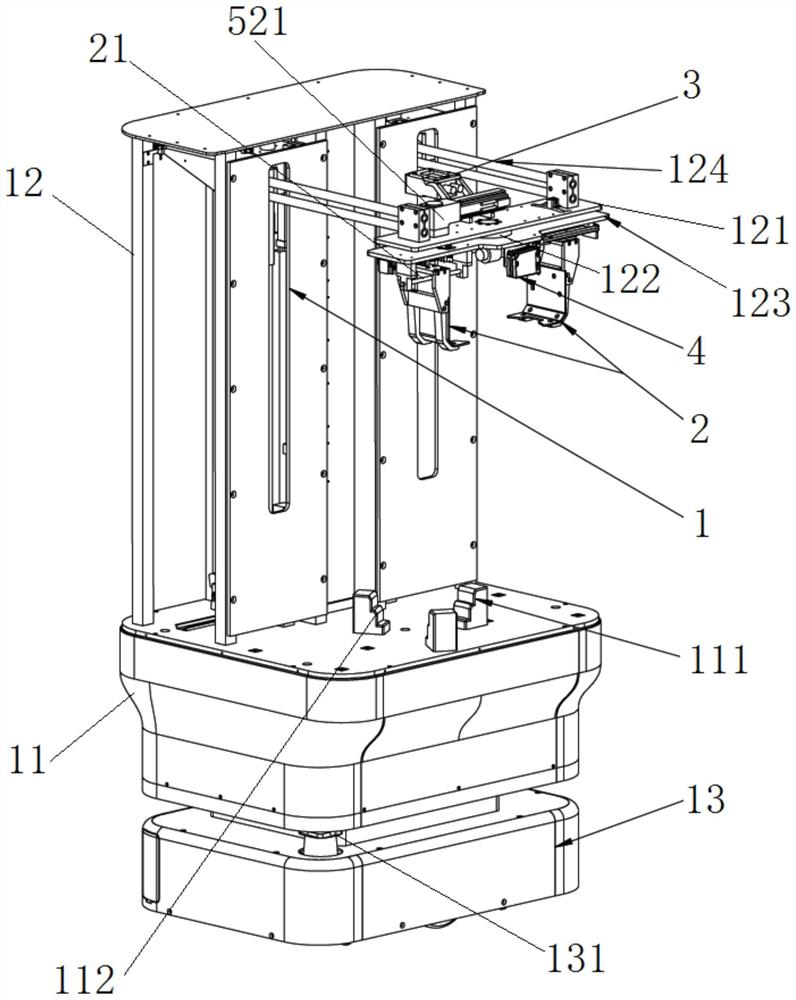
图1为本发明实施例中在第一视角下转运设备的立体图。
图2为本发明实施例中在第二视角下转运设备的立体图。
图3为本发明实施例中夹爪抓取物品时的结构示意图。
元件标号说明
1 设备机体 13 AGV底盘
11 承载座 131 激光雷达
111 限位块 2 夹爪
112 限位部 21 铰接轴
12 机架 3 工业相机
121 上板 4 测距传感器
122 回转轴承 51 直线模组
123 下板 521 旋转电机
124 支撑悬臂 6 物品
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
须知,本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容所能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等用语,亦仅为便于叙述明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
如图1至图3所示,本实施例提供一种转运设备,包括设备机体1、安装在设备机体1上的夹爪2、及安装在设备机体1上的驱动机构,驱动机构用于带动夹爪2移动,设备机体1上还安装有工业相机3,工业相机3与控制器电性连接,控制器与驱动机构电性连接。在抓取物品6过程中,本转运设备利用安装在设备机体1上的工业相机3对待抓取的物品6进行拍照,以获取待抓取的物品6的位置信息或轮廓大小等信息,并将拍摄信息反馈给控制器,控制器根据获取的信息等,控制驱动机构执行相应的动作,以带动夹爪2移动至设定位置,并使得夹爪2能准确地抓取住物品6,无需人工通过目测的方式获取待抓取物品6的相应信息,避免了目测因人为差异带来的不稳定性,且方便了使用,节约了人工成本。
如图1和图2所示,本实施例中设备机体1包括承载座11及安装在承载座11上的机架12,驱动机构、夹爪2及工业相机3均安装在机架12上,承载座11上设有多个间隔分布的限位块111,全部限位块111之间形成用于容纳物品6的物品存放腔,且限位块111朝向物品存放腔的一侧壁上设有台阶式的限位部112。在转运物品6过程中,利用夹爪2抓取物品6后,将物品6暂时放置在承载座11上的物品存放腔中,利用全部限位块111有效限制物品6沿承载座11表面滑动,防止物品6从承载座11上掉落,待本转运设备移动至设定位置后,夹爪2再将物品存放腔中的物品6取出,并放置在设定位置处,此种方式避免在转运过程中,物品6始终由夹爪2夹持容易掉落的问题,且防止夹爪2长期承受较大重量而容易变形。同时,本实施例中限位块111朝向物品存放腔的一侧壁上设有台阶式的限位部112,此种结构使得物品存放腔能存放多种规格大小的物品6,并满足对多种规格大小物品6的限位需求。如图所示,本实施例中限位块111有3个,全部限位块111沿圆周方向均匀分布。本实施例中限位块111的限位部112上具体设有3个台阶,在其它实施例中还可根据需要设定台阶的数量。本实施例中待抓取的物品6可以是呈圆形的罐体。承载座11上的限位块111形成一种罐体缓存点,可缓存不同直径的罐体。
同时,如图1和图2所示,本实施例中设备机体1还包括AGV底盘13,承载座11安装在AGV底盘13上,以利用AGV底盘13具有自动导航的功能,带动承载座11及机架12自动移动至设定位置。
如图1和图2所示,本实施例中设备机体1的机架12包括上板121及通过回转轴承122与上板121相连接的下板123,夹爪2安装在下板123上,驱动机构包括安装在上板121上的旋转驱动组件,旋转驱动组件能驱动下板123绕回转轴承122的中心轴线相对于上板121旋转,旋转驱动组件与控制器电性连接。具体地,如图所示,本实施例中旋转驱动组件包括安装在上板121上的旋转电机521、安装在旋转电机521的输出端的旋转齿轮、及与旋转齿轮相啮合的弧形齿条,弧形齿条固定在下板123上,旋转电机521与控制器电性连接。当本转运设备运行至抓取位置后,会先利用工业相机3拍摄待抓取的物品6,以获取物品6的具体位置信息或物品6的轮廓信息等,若出现因AGV底盘13定位误差导致此时物品6与夹爪2的相对位置关系未准确达到设定要求,比如夹爪2沿回转轴承122的周向相对于物品6有位置偏差时,控制器则控制旋转电机521运行,旋转电机521通过旋转齿轮及弧形齿条带动下板123及夹爪2绕回转轴承122的中心轴线旋转,直至夹爪2与物品6的相对位置达到设定要求,进而控制器再控制驱动机构动作,以带动夹爪2将物品6抓取住。
如图1和图2所示,本实施例中夹爪2有两个,两个夹爪2沿左右方向间隔分布并分别安装在下板123的左右两端,驱动机构包括两组安装在下板123上的直线模组51,两组直线模组51分别用于驱动两个夹爪2沿左右方向移动,且两个直线模组51均与控制器电性连接。两个直线模组51可分别带动两个夹爪2相互靠近或相互远离,两个直线模组51也可分别带动两个夹爪2同步向左或同步向右移动,可用于补偿在AGV底盘13定位时沿左右方向上的偏差。本实施例中直线模组51包括与控制器电性连接的夹爪电机。由夹爪电机驱动夹爪2进行左右方向的运动。本实施例中回转轴承122的中心轴线位于两个夹爪2之间,在下板123绕回转轴承122的中心轴线旋转时,将带动两个夹爪2同步绕回转轴承122的中心轴线旋转。本实施例中上板121及下板123均为平板。回转轴承122的中心轴线垂直于上板121及下板123,且与上板121及下板123的中心重合。
如图1和图2所示,本实施例中设备机体1的机架12还包括沿前后方向延伸的支撑悬臂124,上板121与支撑悬臂124的前端固接,夹爪2通过沿左右方向延伸的铰接轴21与下板123活动连接,夹爪2能绕铰接轴21的中心轴线相对于下板123转动。当本夹爪2抓取较重的物品6时,在物品6的重力作用下会造成支撑悬臂124的前端产生轻微幅度的向下垂落的形变,并使上板121及下板123产生一定的倾斜,而夹爪2能绕铰接轴21的中心轴线相对于下板123转动,从而能避免夹爪2随下板123一起倾斜,使得夹爪2能保持正常悬挂状态,并与物品6保持良好的夹持配合关系。同时,本实施例中下板123上安装有限位件,限位件能限制夹爪2相对于下板123转动的角度范围。本实施例中夹爪2能相对于下板123在3度的范围内旋转。
本实施例中驱动机构还包括安装在设备机体1的机架12上的升降驱动组件及与升降驱动组件相连接的平移驱动组件,平移驱动组件与支撑悬臂124的后端相连接,升降驱动组件能带动平移驱动组件及支撑悬臂124沿上下方向移动,平移驱动组件能带动支撑悬臂124沿前后方向移动。平移驱动组件和升降驱动组件均与控制器电性连接,在抓取物品6过程中,控制器会根据需要控制平移驱动组件动作,以通过支撑悬臂124带动夹爪2沿前后方向平移,控制器也会根据需要控制升降驱动组件动作,以带动平移驱动组件及夹爪2沿上下方向移动。本实施例中驱动机构能带动夹爪2沿上下方向、前后方向及左右方向移动,且驱动机构通过旋转驱动组件还能带动夹爪2沿水平方向旋转,另外夹爪2还能相对于下板123产生一定的浮动旋转。
如图1和图2所示,本实施例中设备机体1上还安装有测距传感器4,测距传感器4与控制器电性连接。本实施例利用测距传感器4可竖直向下进行测距,并将测得距离反馈给控制器,控制器根据获取的距离控制驱动机构进行相应的运作,直至测得距离达到设定距离,此时工业相机3的拍照高度达到设定高度,实现对工业相机3拍照高度的准确定位。本实施例中工业相机3具体安装在上板121的后侧边,且沿左右方向上位于上板121的中部;测距传感器4具体安装在下板123的前侧边,且沿左右方向上位于下板123的中部。
如图1和图2所示,本实施例中AGV底盘13的前后两端各配置一个激光雷达131,每个激光雷达131扫描覆盖270°范围,实现SLAM定位。本实施例中AGV底盘13配置灵活,可灵活调整运动学动力学等参数,具有丰富的控制接口,丰富的视听觉预警效果;精度高,稳定性好,具备毫米级定位精度,具备较低的运动控制时延率和极低的故障率。
本转运设备利用工业相机3,拍照定位抓取目标,给各驱动电机提供纠偏数据。且本转运设备基于AGV底盘13实现自动导航。本转运设备利用位于后方机架12内部的平移驱动组件带动支撑悬臂124及前方夹爪机构沿水平方向且沿直线前后伸缩,用于补偿AGV底盘13在导航定位时的前后偏差。下板123带着下方一对夹爪2,以下板123中心点所在竖直方向为转轴进行旋转,用于被偿AGV底盘13在导航定位时的旋转偏差。两个直线模组51带动两个夹爪2可独立或同步张开或收紧,也可同步向同一方向移动,抓取灵活性较大,还可用于补偿AGV底盘13在导航定位时的左右偏差。位于后方机架12内部的升降驱动组件可带动整个平移驱动组件、支撑悬臂124及夹爪机构沿竖直方向且沿直线做升降运动。
综上所述,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种转运基板、发光二极管的转运方法及转运设备
- 具有转运功能的侧面式转运车、使用方法及转运设备