三级锁
文献发布时间:2023-06-19 11:57:35
优先权要求
本申请要求2018年10月2日提交的美国专利申请号16/149,455的优先权,该专利申请的全部内容通过引用并入本文。
技术领域
本说明书涉及一种飞行器推力反向器致动锁定系统。
背景技术
当代飞行器发动机可包括推力反向致动系统,以辅助在着陆期间降低飞行器速度。典型的推力反向器包括可移动的平移罩,其在处于活动位置时使经过发动机的气流中的至少一部分反向。
在不适当的时候意外或不慎地激活和展开推力反向器可能是危险或致命的。当地勤人员对发动机执行维修时,在地面上的意外展开可能导致受伤或死亡。在飞行期间的意外激活可能导致灾难性的空速损失或机身故障。机械故障,诸如液压损失,也可能使反向器在不适当的时间从收起位置移出。
为了防止意外或无意的推力反向器展开,使用锁定机构。在推力反向器可以从其收起位置移动之前,必须首先使锁解开。一些目前的反向器锁设计实施旋转夹钳来接合探头。此类设计可能是重的并且机械上复杂的,这给它们安装在其上的飞行器增加了重量和维护要求。
发明内容
总的来说,本文件描述了一种飞行器推力反向器致动锁定系统。
在第一方面,推力反向器三级锁设备包括附连到飞行器发动机框架并包括轴的探头,该轴具有在第一端处并可配置为第一配置和第二配置的倒钩;以及附连到推力反向器平移罩滑块或门的接收器,其被配置为容纳该倒钩并包括具有其中限定的孔的端壁,该孔成形为允许在第一配置中倒钩脱离并防止在第二配置中倒钩脱离。
在第二方面,根据方面1,推力反向器三级锁设备进一步包括旋转致动器,其被配置为使倒钩绕轴线旋转,其中倒钩可由旋转致动器在第一配置和第二配置之间旋转。
在第三方面,根据方面2,孔相对于轴线是旋转不对称的,并且倒钩在第一配置和第二配置之间是关于轴线旋转不对称的,使得在第一配置中倒钩可通过孔从接收器脱离,并且在第二配置中倒钩被端壁干涉,使得防止了倒钩的脱离。
在第四方面,根据方面3,倒钩包括至少一个臂,其具有连接到轴的第一端和偏置远离轴的第二端,其中该臂限定了倒钩的旋转不对称性。
在第五方面,根据方面4,第一端可枢转地连接到轴,并且被配置为接触孔的边缘,并在第二配置中在倒钩穿透端壁期间轴向枢转以经过孔,并且被配置为使轴枢转以干涉第二配置中的倒钩的脱离。
在第六方面,根据方面2至5中任一个,倒钩被配置为在激活时旋转到第一配置,并且在停用时旋转到第二配置。
在第七方面,根据方面2至6中任一个,倒钩包括斜面,其被配置为接触孔的边缘,并在倒钩穿透孔期间促使倒钩绕轴线从第二配置旋转到第一配置。
在第八方面,根据方面2至7中任一个,孔的边缘包括斜面,其被配置为接触倒钩,并在倒钩穿透孔期间促使倒钩绕轴线从第二配置旋转到第一配置。
在第九方面,根据方面8,推力反向器三级锁设备进一步包括扭转偏置弹簧,其被配置为在倒钩已完成穿透斜面之后使倒钩绕轴线从第一配置旋转到第二配置。
在第十方面,根据方面1至9中任一个,倒钩在第一配置中具有第一尺寸,并且在第二配置中具有第二尺寸,其中第一尺寸小于孔,使得在第一配置中倒钩能够穿透并脱离孔,并且第二尺寸大于孔,使得在第二配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离。
在第十一方面,根据方面10,倒钩被弹簧偏置朝向第二尺寸。
在第十二方面,根据方面10或11的推力反向器三级锁设备,探头进一步包括线性致动器,并且倒钩包括链接到线性致动器的至少一个臂,其中线性致动器被配置为将臂从第一配置延伸到第二配置,在第一配置中臂从轴延伸第一距离以限定第一尺寸,在第二配置中臂从轴延伸大于第一距离的第二距离以限定第二尺寸。
在第十三方面,一种操作推力反向器三级锁的方法,包括通过在探头的轴的第一端处的倒钩穿透在成形为容纳倒钩的接收器的端壁中限定的孔,将倒钩配置为第一配置,并通过端壁在第一配置中防止倒钩通过孔脱离,来锁定推力反向器三级锁,以及通过将倒钩配置为第二配置并允许倒钩在第二配置中通过孔脱离,来解锁推力反向器三级锁。
在第十四方面,根据方面13,锁定推力反向器三级锁进一步包括在脱离配置中时,将倒钩配置为第一配置,将倒钩接触孔的边缘,其中倒钩与边缘之间的接触促使倒钩从第一配置为第二配置,通过探头穿透孔,并且在倒钩经过孔之后,将倒钩重新配置为第一配置。
在第十五方面,根据方面14,倒钩包括斜面,该斜面被配置为接触孔的边缘,并且在倒钩穿透孔期间促使倒钩绕轴的主轴线从第一配置旋转到第二配置。
在第十六方面,根据方面14或15,孔的边缘包括斜面,该斜面被配置为接触倒钩,并且在倒钩穿透孔期间促使倒钩绕轴的主轴线从第一配置旋转到第二配置。
在第十七方面,根据方面14至16中任一个,在倒钩经过孔之后将倒钩重新配置为第一配置进一步包括在倒钩已完成穿透斜面之后,通过扭转偏置弹簧使倒钩绕轴线从第一配置旋转到第二配置。
在第十八方面,根据方面14至17中任一个,倒钩包括具有第一端的臂,该第一端可枢转地连接到轴,并且被配置为接触孔的边缘并且朝向轴从第一配置枢转到第二配置以在倒钩穿透端壁期间经过孔,并且被配置为远离轴从第二配置枢转到第一配置并且在第一配置中干涉倒钩的脱离。
在第十九方面,根据方面13至18中任一个,将倒钩配置为第一配置包括通过旋转致动器将倒钩绕轴线从第二旋转位置旋转到第一旋转位置。
在第二十方面,根据方面13至19中任一个,将倒钩配置为第二配置包括通过旋转致动器将倒钩绕轴线从第一旋转位置旋转到第二旋转位置。
在第二十一方面,根据方面13至20中任一个,倒钩在第一配置中具有第一尺寸,并且在第二配置中具有第二尺寸,其中第二尺寸小于孔,使得在第二配置中倒钩能够穿透并脱离孔,并且第一尺寸大于孔,使得在第一配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离,并且其中将倒钩配置为第一配置包括通过线性致动器致动链接到线性致动器的至少一个臂,基于致动将臂从第二配置延伸到第一配置,在第二配置中臂从轴延伸第一距离以限定第一尺寸,在第一配置中臂从轴延伸大于第一距离的第二距离以限定第二尺寸。
在第二十二方面,根据方面13至21中任一个,倒钩在第一配置中具有第一尺寸,并且在第二配置中具有第二尺寸,其中第二尺寸小于孔,使得在第二配置中倒钩能够穿透并脱离孔,并且第一尺寸大于孔,使得在第一配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离,并且其中将倒钩配置为第一配置包括通过线性致动器致动链接到线性致动器的至少一个臂,以及基于致动将臂从第一配置缩回到第二配置,在第一配置中臂从轴延伸第一距离以限定第一尺寸,在第二配置中臂从轴延伸小于第一距离的第二距离以限定第二尺寸。
在第二十三方面,根据方面22,倒钩被弹簧偏置到第一尺寸。
在一般方面,推力反向器三级锁设备包括探头,其附连到飞行器发动机框架并具有轴,该轴具有在第一端处并且可配置为第一配置和第二配置的倒钩,以及附连到推力反向器平移罩滑块的接收器,该接收器被配置为容纳倒钩并且具有在其中限定有孔的端壁,该孔成形为允许在第一配置中倒钩脱离并防止在第二配置中倒钩脱离。
各种实施例可以包括以下特征的一些、全部或没有一个。推力反向器三级锁设备可以包括被配置为使倒钩绕轴线旋转的旋转致动器,其中倒钩可由旋转致动器在第一配置和第二配置之间旋转。孔可以是相对于轴线旋转不对称的,并且倒钩在第一配置和第二配置之间是关于轴线旋转不对称的,使得在第一配置中倒钩可通过孔从接收器脱离,并且在第二配置中倒钩被端壁干涉,使得防止倒钩的脱离。倒钩可以包括至少一个臂,其具有连接到轴的第一端和偏置远离轴的第二端,其中该臂限定了倒钩的旋转不对称性。第一端可以可枢转地连接到轴,并且被配置为接触孔的边缘,并在第二配置中的倒钩穿透端壁期间轴向枢转以经过孔,并且被配置为远离轴枢转并干涉第二配置中的倒钩的脱离。倒钩可以被配置为在激活时旋转到第一配置,并且在停用时旋转到第二配置。倒钩可以是斜面,其被配置为接触孔的边缘,并在倒钩穿透孔期间促使倒钩绕轴线从第二配置旋转到第一配置。孔的边缘可以包括斜面,其被配置为接触倒钩,并在倒钩穿透孔期间促使倒钩绕轴线从第二配置旋转到第一配置。推力反向器三级锁设备还可以包括扭转偏置弹簧,其被配置为在倒钩已完成穿透斜面后使倒钩绕轴线从第一配置旋转到第二配置。倒钩在第一配置中可以具有第一尺寸,并且在第二配置中可以具有第二尺寸,其中第一尺寸小于孔,使得在第一配置中倒钩能够穿透并脱离孔,并且第二尺寸大于孔,使得在第二配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离。倒钩可以被弹簧偏置朝向第二尺寸。探头可以包括线性致动器,并且倒钩具有链接到线性致动器的至少一个臂,其中线性致动器被配置为将臂从第一配置延伸到第二配置,在第一配置中臂从轴延伸第一距离以限定第一尺寸,在第二配置中臂从轴延伸大于第一距离的第二距离以限定第二尺寸。
在另一个一般方面,操作推力反向器三级锁的方法包括通过由在探头的轴的第一端处的倒钩穿透在成形为容纳倒钩的接收器的端壁中限定的孔,将倒钩配置为第一配置,并通过端壁在第一配置中防止倒钩通过孔脱离,来锁定推力反向器三级锁,以及通过将倒钩配置为第二配置并允许倒钩在第二配置中通过孔脱离,来解锁推力反向器三级锁。
各种实现方式可以包括以下特征中的一些、全部或没有一个。锁定推力反向器三级锁还可以包括在脱离配置中时,将倒钩配置为第一配置,将倒钩接触孔的边缘,其中倒钩与边缘之间的接触促使倒钩从第一配置为第二配置,通过探头穿透孔,并且在倒钩已经过孔之后,将倒钩重新配置为第一配置。倒钩可以包括斜面,其被配置为接触孔的边缘,并且在倒钩穿透孔期间促使倒钩绕轴的主轴线从第一配置旋转到第二配置。孔的边缘可以包括斜面,其被配置为接触倒钩,并且在倒钩穿透孔期间促使倒钩绕轴的主轴线从第一配置旋转到第二配置。在倒钩已经过孔之后将倒钩重新配置为第一配置还可以包括在倒钩已完成穿透斜面之后,通过扭转偏置弹簧使倒钩绕轴线从第一配置旋转到第二配置。倒钩可以包括具有第一端的臂,该第一端可枢转地连接到轴,并且被配置为接触孔的边缘并且朝向轴从第一配置枢转到第二配置以在倒钩穿透端壁期间经过孔,并且被配置为远离轴从第二配置枢转到第一配置并且在第一配置中干涉倒钩的脱离。将倒钩配置为第一配置可以包括通过旋转致动器将倒钩绕轴线从第二旋转位置旋转到第一旋转位置。将倒钩配置为第二配置可以包括通过旋转致动器将倒钩绕轴线从第一旋转位置旋转到第二旋转位置。倒钩可在第一配置中具有第一尺寸,并且在第二配置中具有第二尺寸,其中第二尺寸小于孔,使得在第二配置中倒钩能够穿透并脱离孔,并且第一尺寸大于孔,使得在第一配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离,并且其中将倒钩配置为第一配置可以包括通过线性致动器致动链接到线性致动器的至少一个臂,基于致动将臂从第二配置延伸到第一配置,在第二配置中臂从轴延伸第一距离以限定第一尺寸,在第一配置中臂从轴延伸大于第一距离的第二距离以限定第二尺寸。倒钩可以在第一配置中具有第一尺寸,并且在第二配置中具有第二尺寸,其中第二尺寸小于孔,使得在第二配置中倒钩能够穿透并脱离孔,并且第一尺寸大于孔,使得在第一配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离,并且其中将倒钩配置为第一配置可以包括通过线性致动器致动链接到线性致动器的至少一个臂,以及基于致动将臂从第一配置缩回到第二配置,在第一配置中臂从轴延伸第一距离以限定第一尺寸,在第二配置中臂从轴延伸小于第一距离的第二距离以限定第二尺寸。倒钩可以被弹簧偏置到第一尺寸。
这里描述的系统和技术可以提供以下优点中的一个或多个。第一,该系统用简单得多的旋转型设计替代了传统的两件式夹钳型锁机构。第二,该系统使用的旋转机构比夹钳型锁机构设计的大且重的移动夹钳更小且更不复杂。第三,该系统使用一个移动件机构,而不是用于摆动夹钳型锁的夹钳的复杂的槽和轴承机构。第四,该系统比夹钳型锁机构更轻且更可靠。
一个或多个实现方式的细节在附图和下面的描述中阐述。其他特征和优点将从描述和附图以及权利要求中显而易见。
附图说明
图1是示例涡扇喷气发动机的示意图,为清晰起见切去了外机舱的一部分。
图2是具有示例性推力反向器的图1的发动机的示意图。
图3是具有替代的示例性推力反向器的图1的发动机的示意图。
图4A是在锁定配置中的示例性推力反向器三级锁的剖面侧视图。
图4B是在解锁配置中的示例性推力反向器三级锁的剖面侧视图。
图5是推力反向器三级锁的示例性接收器的前视图。
图6A和图6B是在锁定和解锁配置中的推力反向器三级锁的示例性探头的侧视图。
图6C和图6D是在锁定和解锁配置中的推力反向器三级锁的示例性探头的端视图。
图7是当脱离时在锁定配置中的示例性推力反向器三级锁的侧视图。
图8是具有斜面的示例性接收器的前视图。
图9A和图9B是具有斜面的示例性倒钩的侧视图。
图10A是在锁定配置中的另一个示例性推力反向器三级锁的剖面侧视图。
图10B是在解锁配置中的另一个示例性推力反向器三级锁的剖面侧视图。
图11A和图11B是另一个示例性倒钩的侧视图。
图12是另一个示例性推力反向器三级锁的剖面侧视图。
图13是另一个示例性推力反向器三级锁的放大剖面侧视图。
图14A是在锁定配置中的另一个探头的放大侧视图。
图14B是在解锁配置中的另一个示例性探头的放大侧视图。
图15是锁定和解锁推力反向器三级锁的示例过程的流程图。
具体实施方式
本文件描述了用于使飞行器涡轮发动机气流反向的系统和技术。具有至少一个可移动元件的推力反向器可用于改变旁路气流的方向,该可移动元件可移动到反向位置和从该反向位置可移动。在反向位置,可移动元件可被配置为使旁路气流中的至少一部分反向。
锁定机构与推力反向器接合,以防止意外激活或意外展开(例如,在飞行期间、在地面维护操作期间)。下面的段落描述了一种在比现有设计相对更轻且更不复杂的组件中提供此种锁定的机构。
图1示出了具有涡轮发动机12、风扇组件13和机舱14的示例涡扇喷气发动机组件10。为了清楚起见,切去了机舱14的一些部分。机舱14围绕涡轮发动机12并限定了穿过喷气发动机组件10的环形气流路径或环形旁路管道16,以限定如箭头18示意性地示出的大致从前到后的旁路气流路径。燃烧气流由箭头19示意性地示出。
具有可移动到反向位置和从反向位置移动的至少一个可移动元件的推力反向器可用于改变旁路气流的方向。在反向位置,可移动元件可被配置为使旁路气流中的至少一部分反向。在涡扇喷气发动机组件上,有若干种获得反向推力的方法。图2示意性地示出了可用于涡扇喷气发动机组件10的推力反向器20的一个示例。推力反向器20包括可移动元件22。可移动元件22被示出为能够相对于机舱14的前部进行轴向运动的整流罩部分。液压致动器24可以联接到可移动元件22,以使可移动元件22移动进入和离开反向位置。在反向位置,如图所示,可移动元件22限制了可移动元件22和涡轮发动机12之间的环形旁路区域,它也打开了可移动元件22和机舱14的前部之间的部分26,使得气流路径可以反转,如箭头28所示。可以包括可选的导流板或挡板(也被称为阻挡门)29,以帮助引导可移动元件22和机舱14的前部之间的气流路径。
图3示意性地示出了推力反向器30的替代示例。推力反向器30包括可移动元件32。可移动元件32被示为可以被内置到机舱14中的一部分中的导流板。液压致动器34可以联接到可移动元件32,以使可移动元件32移动进入和离开反向位置。在以虚线示出并在36处指示的反向位置,可移动元件32将空气向外和向前转向,以使其方向反向,如箭头38所示。可以包括可选的导流板、阻挡门或挡板39以帮助将气流路径向外引导。
在两个图示的例子中,推力反向器改变推力的方向。推力反向器20和推力反向器30两者都被描述为液压操作的系统,并且已示意性地示出了液压致动器。在一些实施例中,推力反向器20和/或推力反向器30可以由其他流体(例如气动的)、机电致动器或任何其他适当的动力源或致动器类型提供动力。
图4A是在锁定配置中的示例性推力反向器三级锁系统400的剖面侧视图。图4B是在解锁配置中的示例性推力反向器三级锁系统400的剖面侧视图。在一些实现方式中,推力反向器三级锁系统400是可用于锁定图2和图3的示例推力反向器20或示例推力反向器30的设备。
示例性系统400包括探头组件410和接收器组件450。探头组件410被配置为附连到结构401,诸如机身构件或飞行器发动机框架。接收器组件450被配置为附连到结构402,诸如推力反向器平移罩滑块。在一些实施例中,探头组件410可以附连到结构402,并且接收器组件450可以附连到结构401。
接收器组件450包括底座460和附连到底座460的附连点470。附连点470提供孔,两个紧固件472(例如,螺栓、螺钉)经过这些孔以将底座可拆卸地附连到结构402。
壳体480也附连到底座460。壳体480包括形成在端壁484中的孔482。空腔486被限定在壳体480内,并且部分地由端壁484限定。
现在参考图5,示出了示例性接收器组件450的前视图。孔482是端壁484中的旋转不对称的开口。例如,如果孔482要在图5的平面中旋转,则孔482的形状相对于孔482在其原始位置的形状将是不同的。在所示的示例中,孔482是矩形的(例如,其长度大于其宽度)。在一些实施例中,孔482可以具有其他旋转不对称的形状,该形状可以被激活并部分地旋转到相对于其原始位置不对称的位置(例如,三角形、椭圆形、梯形、半圆柱形、多边形)。
再次参考图4A和图4B,探头组件410包括限定纵向轴线422的轴420。轴420在一端处旋转地联接到旋转致动器430。旋转致动器430被配置为激活并至少部分地使轴420绕纵向轴线在解锁配置(例如,第一旋转位置)和锁定配置(例如,不同于第一旋转位置的第二旋转位置)之间旋转。
轴420在其另一端处包括倒钩440,与旋转致动器430相对。现在参考图6A至图6D,图6A是推力反向器三级锁系统400的探头410在解锁配置中的放大侧视图,以及图6B是推力反向器三级锁系统400的探头410在锁定配置中的放大侧视图。图6C是推力反向器三级锁系统400的探头410在解锁配置中的放大端视图,以及图6D是推力反向器三级锁系统400的探头410在锁定配置中的放大端视图。
倒钩440绕纵向轴线422是旋转不对称的。例如,当轴420被旋转时,倒钩440的取向可以被改变到相对于其原始位置绕纵向轴线422不对称的位置。在图示示例中,当正对端部看时,倒钩440是矩形的(例如,其长度大于其宽度),诸如图6C和图6D所示。在一些实施例中,倒钩440可以具有其他旋转不对称的形状,该形状可以部分地旋转到相对于其原始位置不对称的位置(例如,三角形、椭圆形、梯形、半圆柱形、多边形)。
再次参考图4A,当旋转到锁定配置时,倒钩440与接收器组件450的端壁484机械地干涉,并且接收器组件450防止探头410的脱离。例如,当倒钩440的矩形形状相对于孔482的形状旋转时(例如,在图示示例中旋转90度),倒钩440被保留在空腔486中。在此种锁定、保留配置中,如图4A的图示示例所示,结构402通过系统400机械地保留到结构401。在使用中,此种锁定和保留配置可用于将推力反向器的可移动部分锁定到发动机框架或机身,以防止推力反向器的不慎或意外展开。
再次参考图4B,当旋转到解锁配置时,倒钩440可以通过孔482配合,这允许倒钩440从空腔486通过端壁484脱离。在此种解锁配置中,如图4B的图示示例所示,结构402从结构401机械地释放。在使用中,此种解锁配置可以允许推力反向器的可移动部分相对于发动机框架或机身移动,例如,允许推力反向器的展开。
在一些实施例中,探头410可以被配置为默认保持在锁定配置中。例如,监管机构(例如FAA)可以要求系统400在旋转致动器430的动力丧失的情况下失效“安全”并且保持接收器组件450锁定到探头410并与探头410接合。在一些实施例中,轴420可以通过扭转或线性弹簧被偏置到锁定配置。例如,旋转致动器430可以包括被配置为促使探头进入锁定配置中的弹簧。当旋转致动器430被激励时,旋转致动器430克服了弹簧偏置以解锁探头410。当旋转致动器430不被激励时,弹簧可以促使探头410回到锁定配置。
图7是在脱离时在锁定配置中的示例性推力反向器三级锁系统700的侧视图。系统700基本上类似于图4A和图4B的示例性推力反向器三级锁系统400,除了相对于示例倒钩440和示例端壁484,探头710的倒钩740和接收器750的端壁784中的一者或两者被修改。端壁784将在图8的描述中进一步讨论,并且倒钩740将在图9A和图9B的描述中进一步讨论。
在示例系统400中,端壁484不仅防止探头410在锁定时从与接收器组件450的接合中脱离,在无修改的情况下,当探头410被锁定并从接收器组件450分离时,端壁484还可以防止探头410与接收器组件450的接合(例如,端壁484由倒钩440穿透)。然而,在一些实现方式中(例如,在一些监管环境下),系统700可以被配置为通过允许结构402(例如,推力反向器滑块)与结构401(例如,发动机框架)重新接合和重新锁定,即使在旋转致动器430没有被激励(例如,由于意外或故障)时,也会失效“安全”。
示例性系统700包括可允许探头710在锁定和分离时与接收器750接合的修改。例如,系统700可以将结构402固定到结构401上,即使当旋转致动器430在缩回结构402之前尚未被激励时(例如,有人忘记在缩回之前解锁探头710,旋转致动器在缩回期间发生故障并且未能将探头710移动到解锁配置)。
类似于倒钩440,倒钩740是旋转不对称的,并且可以在锁定配置和解锁配置之间旋转,并且类似于端壁484,该端壁包括旋转不对称的孔782,其被配置为在锁定配置中防止倒钩740从接收器750脱离。然而,在没有额外的特征,诸如将在下面讨论的那些特征的情况下,此种配置也可以在倒钩740脱离和锁定时防止端壁784被倒钩740穿透。倒钩740和端壁784包括特征,当接收器750从延伸位置朝向缩回位置移动时,这些特征有助于促使探头710从锁定配置到解锁配置。
现在参考图8,示出了示例性接收器750的前视图。接收器750基本上类似于示例接收器组件450,除了端壁784包括斜面786的集合之外。斜面786被配置为螺旋形或螺旋状的斜坡,其在端壁784的正面处开始,并且向下倾斜并通过正面784的厚度的一部分旋转地倾斜到孔482。当接收器750朝向探头710线性移动时,倒钩740接触斜面786的一部分。斜面786被配置为将接收器750和探头710之间的线性运动转换为探头710的旋转运动(例如,通过当倒钩740沿斜面786的斜坡向下滑动时促使旋转)。在一些实施例中,由倒钩740和斜面786的相互作用提供的旋转运动的力可以足以克服弹簧偏置,该弹簧偏置被配置为否则促使倒钩740朝向锁定配置。
最终,倒钩740被旋转到相对于接收器750的解锁配置中。在解锁配置中,倒钩740可以继续通过孔482穿透端壁784的厚度的剩余部分。一旦倒钩完全穿透端面784,倒钩740可以旋转回锁定配置,例如通过激励旋转致动器430或通过被配置为促使倒钩740朝向锁定配置的弹簧偏置(例如,将结构402可逆地联接到结构401)。
图9A和图9B是具有斜面的示例性倒钩940的相对侧视图。在一些实施例中,倒钩940可以是图4A和图4B的示例倒钩440,或图7的示例倒钩740。
倒钩940基本上类似于示例倒钩440,除了倒钩940包括斜面950的集合之外。斜面950被配置为成角度的、螺旋形的或螺旋状的斜坡,其从倒钩940的相对侧的主要面952开始,并且向下倾斜并旋转地倾斜通过倒钩940的厚度的一部分。在一些实施例中,斜面950可以与示例接收器750的斜面786互补。在倒钩940与示例系统700一起使用的实施例中,当接收器750朝向探头710线性移动时,倒钩740接触斜面950的一部分。斜面950被配置为将接收器750和探头710之间的线性运动转换为探头710的旋转运动(例如,通过当倒钩740沿着斜面950的斜坡向下滑动时促使旋转)。在一些实施例中,由倒钩740和斜面950的相互作用提供的旋转运动的力可以足以克服被配置为否则促使倒钩740朝向锁定配置的弹簧偏置。
图10A是在锁定配置中的另一个示例性推力反向器三级锁系统1000的剖面侧视图。图10B是在解锁配置中的该系统1000的剖面侧视图。总体来说,系统1000与图4A和图4B的示例系统400基本上类似,但具有不同的倒钩配置和接收器配置。系统1000包括结构401和结构402,它们通过探头1010和接收器1050可释放地链接。
探头1010包括旋转致动器430和轴420。探头1010还包括倒钩1040。图11A和图11B是图10A和图10B的示例性倒钩1040在锁定配置(例如,图11A)和解锁配置(例如,图11B)中的放大侧视图。
倒钩1040包括附连到轴420的底座1042。从底座1042成角度地延伸的是臂1044a和臂1044b。臂1044a、1044b被配置为在枢轴点1046上枢转。偏置构件(例如,弹簧)(未示出)被配置为使臂1044a、1044b偏置远离轴420。当大于偏置力的力被施加到臂1044a、1044b时,臂1044a、1044b朝向缩回位置枢转,该缩回位置比在臂的延伸的偏置位置时相对更平行于轴420。
倒钩1040是绕纵向轴线422旋转不对称的。例如,当轴420旋转时,倒钩1040的定向可以被改变到相对于其原始位置绕纵向轴线422不对称的位置。在图示示例中,臂1044a、1044b从基座1042的相对两侧延伸大于基座1042和轴420的厚度的一距离。
再次参考图10A和图11A,当旋转到锁定配置时,倒钩1040与接收器1050的端壁484机械地干涉,并且接收器1050防止探头1010的脱离。例如,当倒钩1040的臂1044a、1044b相对于孔482的形状旋转时(例如,在图示示例中旋转90度),倒钩1040被保留在空腔486内。在此种锁定、保留配置中,如图10A的图示示例所示,结构402通过系统1000被机械地保留到结构401。在使用中,此种锁定和保留配置可用于将推力反向器的可移动部分锁定到发动机框架或机身,以防止推力反向器的不慎或意外展开。
再次参考图10B和图11B,当旋转到解锁配置中时,倒钩1040可以通过孔482配合,这允许倒钩1040通过端壁484从空腔486脱离。在此种解锁配置中,如图10B的图示示例所示,结构402从结构401机械地释放。在使用中,此种解锁配置可以允许推力反向器的可移动部分相对于发动机框架或机身的移动,例如,以允许推力反向器的展开。
在一些实施例中,探头1010可以被配置为默认保持在锁定配置中。例如,轴420可以通过弹簧被偏置到锁定配置。当旋转致动器430被激励时,旋转致动器430克服弹簧偏置以解锁探头1010。当旋转致动器430不被激励时,弹簧可以促使探头1010回到锁定配置。
图12是在脱离时在锁定配置中的示例性推力反向器三级锁系统1000的侧视图。在示例系统1000中,端壁484防止探头410在锁定时脱离与接收器组件450的接合。然而,在一些实现方式中(例如,在一些监管环境下),系统1000可以被配置为通过允许结构402(例如,推力反向器滑块)与结构401(例如,发动机框架)重新接合并重新锁定,即使在旋转致动器430没有被激励(例如,由于意外或故障)时,也会失效“安全”。
图13是图10A和图10B的示例性推力反向器三级锁系统1000的放大剖面侧视图。系统1000包括可允许探头1010在锁定和分离时与接收器1050接合的修改。例如,系统1000可以将结构402固定到结构401,即使在结构402缩回之前旋转致动器430尚未被激励时(例如,有人忘记在缩回之前解锁探头1010,旋转致动器在缩回期间发生故障并且未能将探头1010移动到解锁配置)。
如上所述,倒钩1040是旋转不对称的,并且可以在锁定配置和解锁配置之间旋转,并且端壁484包括旋转不对称的孔482,其被配置为防止倒钩1040在锁定配置中从接收器1050脱离。臂1044a、1044b被配置为允许在倒钩1040脱离和锁定时端壁484由倒钩1040穿透。
默认情况下,臂1044a、1044b朝向延伸配置偏置远离轴420,该延伸配置延伸到比孔482的尺寸相对较大的尺寸。当臂1044a、1044b朝向轴折叠回来时,臂1044a、1044b具有比孔482的尺寸相对较小的缩回尺寸。
当接收器1050朝向探头1010线性移动时,倒钩1040接触端壁484的一部分。当倒钩1040穿透孔482时,臂1044a、1044b被配置为朝向轴420枢转或以其他方式向内折叠。线性运动的力足以克服弹簧偏置,该弹簧偏置被配置为将臂1044a、1044b朝向它们的延伸配置延伸。在臂1044a、1044b处于较小的缩回位置的情况下,即使当探头1010在锁定配置时,倒钩1040也可通过孔482配合。一旦倒钩1040完全穿透端壁484,弹簧偏置导致臂1044a、1044b卡扣回到它们的较大的、延伸的位置,这将探头1010锁定到接收器1050。
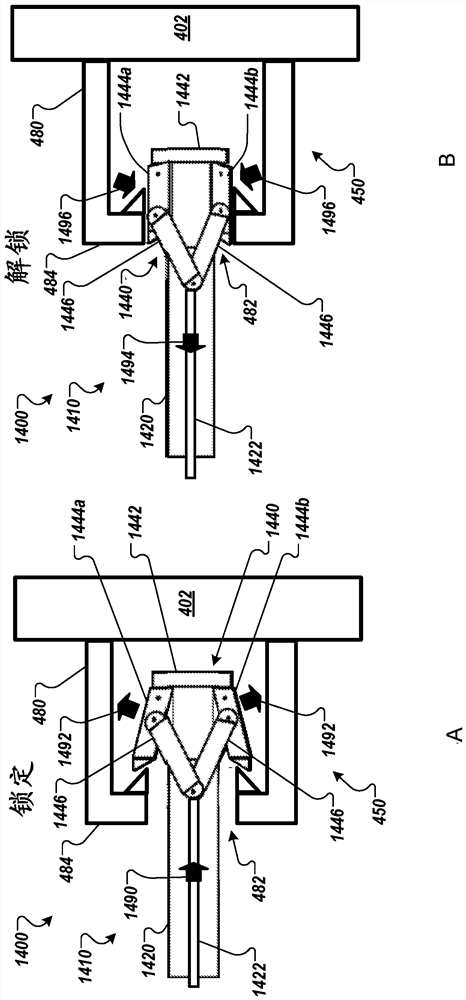
图14A和图14B示出了示例推力反向器三级锁系统1400。图14A是在锁定配置中的示例探头1410的放大侧视图。图14B是在解锁配置中的探头1410的放大侧视图。总的来说,探头1410基本上类似于图10A和图10B的示例探头1010,但包括可主动延伸和缩回的倒钩1440,替代可旋转的倒钩,或除了可旋转之外还可延伸和缩回。
探头1410包括轴1420。探头1410还包括倒钩1440。倒钩1440包括附连到轴420的底座1442。从底座1442成角度延伸的是臂1444a和臂1444b。臂1444a、1444b被配置为相对于底座1442枢转。一对连杆1446在其第一端处可枢转地连接到臂1444a、1444b,并在其第二端处可枢转地连接到致动杆1422。致动杆1422联接到线性致动器(未示出),其被配置为促使致动杆1422的线性移动。致动杆1422的线性移动(例如,基本上平行于轴1420)延伸和缩回臂1444a、1444b,如将在下面进一步讨论。
参考图14A,当促使致动杆1422朝向倒钩1440时,如箭头1490所指示,连杆1446推入臂1444a和1444b中,促使臂1444a、1444b枢转,如箭头1492所指示,朝向相对大于孔482的尺寸的延伸位置。在延伸的、锁定的配置中,端壁484与倒钩1440机械地干涉,并防止探头1410从接收器组件450分离。
参考图14B,当促使致动杆1422远离倒钩1440时,如箭头1494所指示,连杆1446向上拉动臂1444a和1444b,拖动臂1444a、1444b枢转,如箭头1496所指示,朝向相对小于孔482的尺寸的缩回位置。在缩回的、解锁的配置中,端壁484不与倒钩1440机械地干涉以防止探头1410从接收器组件450分离。
图15是锁定和解锁推力反向器三级锁的示例过程1500的流程图。在一些实现方式中,该过程1500可以与图4A至图6D的示例推力反向器三级锁系统400、图7至图9B的示例推力反向器三级锁系统700、图10A至图13的示例推力反向器三级锁系统1000和/或图14A和图14B的示例推力反向器三级锁系统1400一起使用。
在1510处,推力反向器三级锁被锁定。例如,推力反向器三级锁系统400可以被锁定。为了锁定该锁,执行若干个步骤。
在1512处,在探头的轴的第一端处的倒钩穿透限定在被成形为容纳该倒钩的接收器的端壁中的孔。例如,接收器组件450,如图4B所描绘,可以线性地移近探头410,直到倒钩440穿透孔482。
在1514处,倒钩被配置为第一配置。例如,探头410可以被重新配置为锁定配置,如图4A所描绘。
在1516处,在第一配置中,通过端壁防止倒钩通过孔脱离。例如,如果接收器组件450远离探头410移动,则倒钩440将被端壁484抓住并被防止脱离。因此,结构402将被锁定到结构401。
在一些实施例中,锁定推力反向器三级锁还可以包括,当在脱离配置中时,将倒钩配置为第一配置,将倒钩接触孔的边缘,其中倒钩与边缘之间的接触促使倒钩从第一配置到第二配置,通过探头穿透孔,并且在倒钩经过孔之后,将倒钩重新配置为第一配置。在一些实施例中,倒钩包括斜面,其被配置为接触孔的边缘,并在倒钩穿透孔期间促使倒钩绕轴的主轴线从第一配置旋转到第二配置。例如,倒钩940包括斜面950,其可接触孔482的边缘,以促使倒钩940旋转,从而允许倒钩940穿透端壁784。在一些实施例中,孔的边缘可以包括斜面,其被配置为接触倒钩并促使倒钩在倒钩穿透孔期间绕轴的主轴线从第一配置旋转到第二配置。例如,端壁784包括斜面786,其可以促使倒钩740旋转,以允许倒钩940穿透端壁784。
在一些实施例中,在倒钩经过孔之后,将倒钩重新配置为第一配置,可以包括在倒钩已完成穿透斜面之后,通过扭转偏置弹簧将倒钩绕轴线从第一配置旋转到第二配置。例如,倒钩740可以由连接到轴上的扭转弹簧(未示出)被弹簧偏置。旋转致动器430、斜面786和/或斜面950可以抵抗弹簧的力扭动轴,并且一旦倒钩740经过孔782,弹簧的力可以将倒钩740卡扣入锁定配置中。
在一些实施例中,倒钩可以包括具有第一端的臂,该第一端可枢转地连接到轴并且被配置为接触孔的边缘并且朝向轴从第一配置枢转到第二配置以在倒钩穿透端壁期间经过孔,并且被配置为远离轴从第二配置枢转到第一配置并且干涉在第一配置中的倒钩的脱离。例如,倒钩1040包括臂1044a、1044b,其可以折叠回来以允许倒钩1040经过孔482,并且展开以防止倒钩1040通过端壁484脱离。
在1520处,推力反向器三级锁被解锁。例如,推力反向器三级锁系统400可以被解锁。为了解锁,执行若干个步骤。
在1522处,倒钩被配置为第二配置。例如,倒钩440可以被重新配置为解锁配置。在解锁配置中,倒钩440可以配合通过孔482。
在1524处,允许在第二配置中倒钩通过孔脱离。例如,当倒钩440在解锁配置中并且结构402被线性地远离结构401移动时,倒钩440可以经过孔482,从而允许结构402从结构401解锁。
在一些实施例中,将倒钩配置为第一配置可以包括通过旋转致动器使倒钩绕轴线从第二旋转位置旋转到第一旋转位置。例如,旋转致动器430或弹簧可以使倒钩440旋转到图4B、图6B和图6D所示的解锁配置。
在一些实施例中,将倒钩配置为第二配置可以包括通过旋转致动器使倒钩绕轴线从第一旋转位置旋转到第二旋转位置。例如,旋转致动器430或弹簧可以促使倒钩440旋转到图4A、图6A和图6C所示的锁定配置。
在一些实施例中,倒钩在第一配置中可以具有第一尺寸,并且在第二配置中可以具有第二尺寸,其中第二尺寸小于孔,使得倒钩在第二配置中能够穿透并脱离孔,并且第一尺寸大于孔,使得在第一配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉而防止倒钩通过孔的脱离。其中将倒钩配置为第一配置可包括通过线性致动器致动链接到线性致动器的至少一个臂,基于致动将臂从第二配置延伸到第一配置,在第二配置中臂从轴延伸第一距离以限定第一尺寸,在第一配置中臂从轴延伸大于第一距离的第二距离以限定第二尺寸。在一些实施例中,倒钩可以在第一配置中具有第一尺寸,并且在第二配置中具有第二尺寸,其中第二尺寸小于孔,使得在第二配置中倒钩能够穿透并脱离孔,并且第一尺寸大于孔,使得在第一配置中倒钩被接收器保留并且通过倒钩和端壁之间的干涉来防止倒钩通过孔脱离,其中将倒钩配置为第一配置可以包括通过线性致动器致动链接到线性致动器的至少一个臂,以及基于致动将臂从第一配置缩回到第二配置,在第一配置中臂从轴延伸第一距离以限定第一尺寸,在第二配置中臂从轴延伸小于第一距离的第二距离以限定第二尺寸。例如,致动杆1422可以通过线性致动器线性移动以使臂1444a、1444b延伸和缩回,从而扩展和缩小倒钩1440的整体尺寸。在扩展配置中,倒钩1440太大以至于不能通过孔482缩回。在缩回配置中,倒钩1440足够小从而可通过孔482从接收器组件450脱离。
在一些实施例中,倒钩可以被弹簧偏置到第一尺寸。例如,倒钩440可以被弹簧偏置到锁定的旋转位置,其中倒钩440相对于孔482的旋转位置使得倒钩440太大以至于不能通过孔482脱离。在另一个示例中,倒钩1040的臂1044a、1044b可以被弹簧偏置到较大的、打开的配置。在另一个示例中,致动杆1422和/或臂1444a、1444b可以被弹簧偏置以使臂1444a、1444b打开到较大的、打开的配置。
尽管上面已详细描述了几种实现方式,但其他修改是可能的。例如,图中描绘的逻辑流程不需要所示的特定顺序或连续顺序以实现期望的结果。此外,可以提供其他步骤,或从所描述的流程取消步骤,并且可以将其他部件添加到所描述的系统或将其他部件从该系统去除。因此,其他实现方式在所附权利要求的范围内。
- 带三级锁位的电动吸合锁机构
- 可更换锁芯的隐形三级管理锁