基于激光十字标准线辅助的双目视觉测距装置及方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属机器视觉测距技术领域,提出一种基于激光十字线双目测距方法,本发明主要应用于高精度非接触测量领域
背景技术
视觉测距相比与其他测距方法具有成本低、适用范围广的优势,具有非常好的发展前景。目前双目视觉测距,基于特征点匹配和小孔成像原理,获取对应特征点的视差,应用三角形原理求取距离。受特征点识别精度以及相机成像的非线性的影响,测量的精度和可靠性都不尽人意。
发明内容
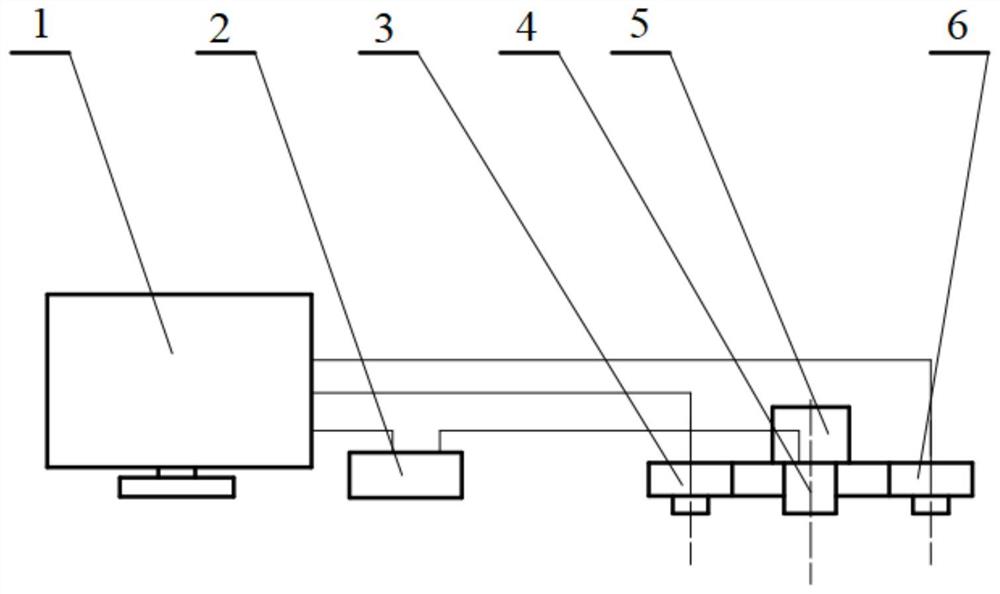
本发明的目的在于克服双目视觉特征点提取的困难,增加可变线宽的激光十字投影线,以十字交叉点为特征点进行测量计算;对于相机成像的非线性特征进行实验测量和标定;由此可大大提高双目测距的精度和适用范围。为实现上述目的,本发明提供的技术方案如下:激光十字线辅助双目测距装置,包括计算机1、激光控制器2、左相机3、激光发射器4、右相机6、机架5。
左右相机及激光发射器安装在机架上,激光发射器安装在左右相机中间,左右相机及发射器的中心线在同一平面。
激光发射器可发射高精度标准十字线投影光,其亮度通过激光控制器输出功率控制,十字线宽可以调节,通过步进电机转动激光发射器镜头实现;左、右相机通过usb线直接和计算机连接,激光控制器通过网线和计算机连接;计算机通过相机驱动程序直接获取相机图像;计算机通过网线控制激光器,实现激光输出功率控制及激光发射器镜头调节步进电机的转角控制。
技术方案包括以下步骤:
步骤1:将测量装置安装在三坐标测量机上;
步骤2:对左右相机进行标定,获得相机的内参数;
步骤3:在三坐标测量机工作台面放置一标准陶瓷块,保证激光线成像好且不产生高亮反光。
步骤4:三坐标在z方向移动定位10个位置,在每个位置,左右相机均拍摄两张图片,一张为开启激光器有十字线的图像,另一张为未开启激光器的没有十字线的图像;
步骤5:对图像集进行图像处理获取十字交叉点相机坐标值;
步骤6:建立图2所示系统标定坐标系,以左相机坐标系为基准坐标系;在左相机坐标系中,设定三坐标移动向量为Z
左相机移动Li,十字中心点在左相机成像坐标变化为:
待求的变量有:x
上式分别对上x
同理可求出右相机的六个参数:x
同一个m点在两个坐标系的差即得到右相机原点在左相机坐标系的值:
将右相机坐标转换至左相机坐标,测量十字中心点坐标:
测量机移动向量:
联列上述2式得6元一次线性方程组,解方程则得到变量:(x
步骤7:测距,求任一位置时,十字投影线中心的坐标值(在左相机坐标系的值);
任一位置点,对左右相机获取的图像处理,可得到十字线中心点的相机坐标,左相机坐标 (u
设交点m距离右相机原点为t,则坐标点为:
一维搜索t,当下列向量叉乘的模为零时,得到问题的解t
将t
采用上述技术方案所产生的的有益效果在于:
本发明提供的一种基于激光十字标准线辅助的双目视觉测距方法,相比普通双目测距,特征点准确无误,数据处理速度快,测量精度高,相比单点光斑辅助测距,中心点位由两条线交会获取,远距离测量更容易捕获,增加变线宽的激光十字线,能测量的范围进一步扩大,实现大量称的高精度测量。
附图说明
图1是本发明激光十字线辅助双目测距装置示意图。
图2是本发明激光十字线辅助双目测距装置标定示意图。
图3双目相机坐标系示意图。
图4双目相机标定原理示意图
图1中:1计算机,2激光控制器,3左相机,4激光器,5机架,6右相机;
图2中:1激光十字线辅助双目测距装置,2三坐标测量机,3陶瓷平板;
图3中:O
图4中:(x
具体实施方式
下面结合附图和实施例对本发明进行详细说明。以下实施例用于说明本发明,但不用来限制本发明的范围。
步骤1:将激光十字标准线辅助双目视觉测量装置安装在三坐标测量机上;保证标定位移的高精度,定位精度可以达到0.1微米。
步骤2:对左右相机进行标定,获得相机的内参数;控制三坐标测量机带动测量装置,相对工作台上的棋盘格远近上下左右前后各方位随机定位20个位置,左右相机在定位位置拍摄图片,获取20张标定图像,然后利用张定友标定法,获取左右相机的内参数焦距、像素坐标和物理坐标的转换系数、畸变系数;
步骤3:在三坐标测量机工作台面放置一标准陶瓷板,平面度达到00级,保证激光线成像好且不产生高亮反光。
步骤4:三坐标在z方向移动定位20个位置,由镜头距陶瓷标准板距离50mm开始,每次增加15mm进行定位,左右相机均拍摄两张图片,一张为开启激光器有十字线的图像,另一张为未开启激光器的没有十字线的图像;
步骤5:对图像集进行图像处理获取十字交叉点相机坐标值;左右相机在同一位置有获取的开激光线和未开激光线两张图片,进行差分运算,获得十字线图像;使用保形快速形态细化求十字线的交点,获得像素坐标值,进而利用相机内参转化为相机坐标;
步骤6:建立图2所示系统标定坐标系,以左相机坐标系为基准坐标系;在左相机坐标系中,设定三坐标移动向量为Z
左相机移动Li,十字中心点在左相机成像坐标变化为:
待求的变量有:x
上式分别对上x
同理可求出右相机的六个参数:x
同一个m点在两个坐标系的差即得到右相机原点在左相机坐标系的值:
将右相机坐标转换至左相机坐标,测量十字中心点坐标:
测量机移动向量:
联列上述2式得6元一次线性方程组,解方程则得到变量:(x
步骤7:测距,求任一位置时,十字投影线中心的坐标值(在左相机坐标系的值);
任一位置点,拍摄图像,首先对图像进行激光十字成像质量,如果成像不清晰,十字线图像处理后不连续,则调节激光控制器,增大功率,同时调节激光器镜头电机,增大十字线宽度,确保十字线图像清晰可辩。对左右相机获取的图像处理,可得到十字线中心点的相机坐标,左相机坐标(u
设交点m距离右相机原点为t,则坐标点为:
一维搜索t,当下列向量叉乘的模为零时,得到问题的解t
将t
- 基于激光十字标准线辅助的双目视觉测距装置及方法
- 一种不同瞄准线上多目标脉冲激光测距装置及方法