一种无人机操纵手柄
文献发布时间:2023-06-19 12:13:22
技术领域
本发明属于无人机操纵技术领域,更具体地,涉及一种无人机操纵手柄。
背景技术
现代飞行器控制技术的日益发展,各种各样的飞行器逐渐都呈现了很高的自治性,但面临着陆低空近地、紊乱风场等复杂工况,全自治无人机在着陆时仍然面临很大的挑战。目前市场上较为缺少针对在无人机自主控制的同时辅助干预实时调值的操纵手柄,现有装置也较难调整为用作导航级遥控,特别是在导航级辅助干预的操纵。
发明内容
本发明的目的是针对现有技术中存在的不足,提供一种无人机操纵手柄,该操纵手柄针对导航级操纵的能力,在无人机自动控制基础上,简化手柄结构,使手柄操纵更直观,手动操纵更加稳定,使无人机控制平滑过渡,且具备瞬时干预能力,适合中大型自治无人机导航级操纵和应急干预。
为了实现上述目的,本发明提供一种无人机操纵手柄,包括:
底座;
油门拨杆和调整转盘,设置在所述底座上;
干预手柄,所述干预手柄包括操作盘,所述操作盘通过多个位移弹簧与所述底座连接;
处理器,与所述油门拨杆、所述调整转盘和所述干预手柄连接,所述处理器包括位移弹簧检测模块,所述位移弹簧监测模块用于监测所述位移弹簧的形变信息,所述处理器用于根据所述形变信息对无人机进行操控。
可选地,所述调整转盘为增量式调整转盘。
可选地,所述底座的侧壁上设置有按钮,所述按钮包括使能按钮和归零按钮,所述底座正面还设置有与所述按钮一一对应的指示灯。
可选地,所述油门拨杆为离散值档位拨杆,包括爬升档位、巡航档位、下滑档位和停止档位。
可选地,所述处理器与所述无人机的自驾仪连接,所述处理器能够根据所述形变信息改变所述自驾仪对所述无人机的操纵指令,所述操纵指令包括侧偏调整速度指令和垂向调整速度指令,分别对无人机导航级运动横向侧偏和垂向高度的自驾仪指令值进行增量式调整干预。
可选地,所述位移弹簧设置有三个,三个所述位移弹簧分别为第一位移弹簧、第二位移弹簧、第三位移弹簧,所述第一位移弹簧设置在所述操作盘的后端中部,所述第二位移弹簧和所述第三位位移弹设置在所述操作盘的前端两侧,所述第二位移弹簧和所述第三位移弹簧对称设置于所述第一位移弹簧的两侧。
可选地,所述变形信息包括变形量,所述第一位移弹簧、第二位移弹簧和第三位移弹簧的变形量分别为L3、L2和L1,所述根据所述变形信息改变所述自驾仪的操纵指令包括:
根据所述变形量获取干预指令;
根据所述干预指令改变所述自驾仪对所述无人机的操纵指令;
所述干预指令包括向右指令计算值、向左指令计算值、向上指令计算值和向下指令计算值,所述向右指令计算值和所述向左指令计算值互为相反数,所述向上指令计算值和所述向下指令计算值互为相反数;
所述向右指令计算值通过下述公式一计算:
K
其中,H为所述位移弹簧的左右跨度,K
所述向上指令计算值通过下述公式二计算:
K
其中,V为所述位移弹簧的上下跨度,K
可选地,所述位移弹簧的一端设置有预紧结构,所述预紧结构用于调节所述干预手柄的操作刚度。
可选地,所述按钮最大值行程回弹力不小于0.10公斤,有效触发行程为0.8cm,舒展态所述按钮相对安装面高出1.0cm,锁定触发态所述按钮相对安装面高出0.4cm。
可选地,所述操作盘设置有多个与手指相适应的凹槽,且食指内侧隔板(最左侧突起)突出其他隔板不小于0.5cm,外侧隔板(最右侧平齐突起)横向宽度不小于1.0cm,便于手柄受力。
本发明提供一种无人机操纵手柄,其有益效果在于:
该操纵手柄针对导航级操纵的能力,在无人机自动控制基础上,简化手柄结构,使手柄操纵更直观,手动操纵更加稳定,使无人机控制平滑过渡,且具备瞬时干预能力,适合中大型自治无人机导航级操纵和应急干预。
本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
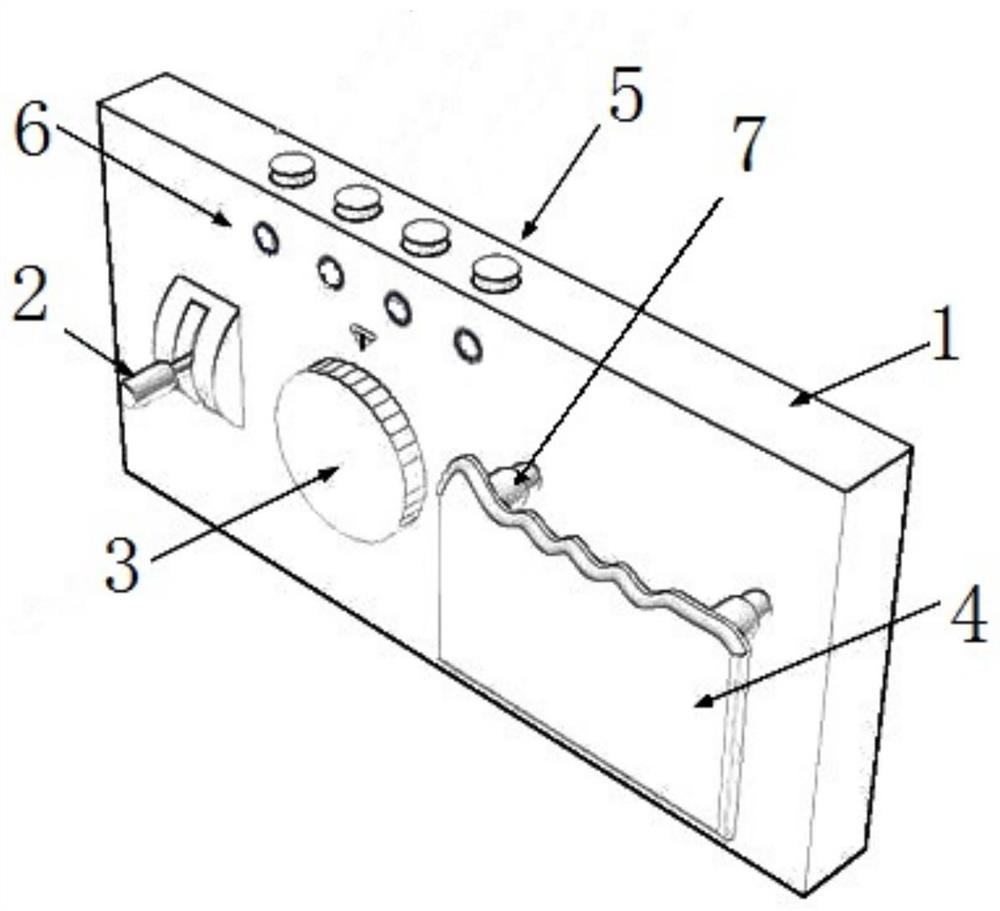
图1示出了根据本发明的一个实施例的一种无人机操纵手柄的结构示意图。
图2示出了根据本发明的一个实施例的一种无人机操纵手柄的主视图。
图3示出了根据本发明的一个实施例的一种无人机操纵手柄的仰视图。
图4示出了根据本发明的一个实施例的一种无人机操纵手柄的控制示意图。
附图标记说明:
1、底座;2、油门拨杆;3、调整转盘;4、干预手柄;5、按钮;6、指示灯;7、位移弹簧。
具体实施方式
下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
图1示出了根据本发明的一个实施例的一种无人机操纵手柄的结构示意图;图2示出了根据本发明的一个实施例的一种无人机操纵手柄的主视图;图3示出了根据本发明的一个实施例的一种无人机操纵手柄的仰视图。
如图1-3所示,一种无人机操纵手柄,包括:
底座1;
油门拨杆2和调整转盘3,设置在底座上;
干预手柄4,干预手柄4包括操作盘,操作盘通过多个位移弹簧7与底座1连接;
处理器,与油门拨杆2、调整转盘3和干预手柄4连接,处理器包括位移弹簧检测模块,位移弹簧监测模块用于监测位移弹簧7的形变信息,处理器用于根据形变信息对无人机进行操控。
具体的,通过油门拨杆2控制无人机动力输出,调整转盘3位于手柄中部,通过调整转盘3控制无人机转向,左旋则无人机向左旋转调整,右旋则无人机向右旋转调整,在无人机着陆跑道时,调整无人机航向轨迹指令值,起到重新航向截获和结合侧偏调整着陆时对准跑道的操纵目地,在着陆的高频操纵阶段避免了误触,通过干预手柄4能够建立上下左右象限,在无人机自动巡航时快速干预,使无人机在航向指令不改变过的情况下横侧向跑道或关键航路位置对准,当干预手柄4右滚时表示向右,手柄前侧上扬时表示向上,既右滚又前侧上扬表示右上,且指令值大小和滚转行程俯仰行程成正比,处理器为AVR单片机,通过处理器处理油门拨杆2和方向控制结构的控制指令信号,将控制指令信号通过USB接口传给主控电脑。
进一步,干预手柄4与底座1通过位移弹簧7和与处理器电连接的内嵌嵌入式单元实现,通过嵌入式单元综合测量位移弹簧7的压缩/伸展量解算展长并进一步综合解算手柄姿态,左右信号量和手柄滚转角成正比,上下信号量和手柄俯仰角成正比,增益参数通过软件可调节。
在本实施例中,调整转盘3为增量式调整转盘。
具体的,方向调整转盘3为相对增量式调整转盘而非绝对刻度值转盘,左旋无人机航向指令向左旋转调整,右旋时无人机指令定向右旋转调整,调整转盘3凸出底座1.5cm。
在本实施例中,底座1的侧壁上设置有按钮5,按钮5包括使能按钮和归零按钮,底座1正面还设置有与按钮5一一对应的指示灯6。
具体的,按钮5处于上侧壁避免误触发,指示灯6位于正面便于观察,按钮5和指示灯6处于不同表面但位置布局上上横纵向位置一一对应,通过使能按钮控制操纵手柄的启闭,通过归零按钮使操纵手柄的自恢复,使操纵手柄各项数值恢复初始状态,通过指示灯6显示使能按钮和归零按钮的工作状态,同时底座1设置有备用按钮和备用指示灯,用于扩展。
在本实施例中,油门拨杆2为离散值档位拨杆,包括爬升档位、巡航档位、下滑档位和停止档位。
具体的,通过油门拨杆2调整无人机动力输出,拨杆长度5cm,每个挡位离散值挡位停顿力(拨杆卡顿力)不小于4N*cm,拨杆挡位行程卡顿感明显,挡位拨片行程较短,使得在如固定翼无人机着陆时适用大导航控制周期工况下对无人机动力的脉冲式干预(脉冲式干预即短暂轰加大动力输出后瞬间减小动力输出甚至停止制动减速,起到动力脉冲式干预的操纵目的)。
在本实施例中,处理器与无人机的自驾仪连接,处理器能够根据形变信息改变自驾仪对无人机导航级运动的操纵指令,操纵指令包括侧偏调整速度指令和垂向调整速度指令,分别对无人机导航级运动横向侧偏和垂向高度的自驾仪指令值进行增量式调整干预。
进一步,如手柄左倾,产生对应侧偏调整速度值,干预自驾仪对如固定翼无人机的横向侧偏指令值,以上述调整速度向左侧变化,当手柄回正后调整速度指令值归零,横向侧偏指令值比较之前向左侧进行了偏移(偏移值大小为,侧偏调整速度曲线关于干预时间的积分),无人机运动表现为向左侧调整侧偏后继续前进;垂向同理。
具体的,通过处理器与无人机的自驾仪连接干预无人机飞行,方便及时调控无人机飞行轨迹,在自驾仪控制基础上,干预无人机导航级运动。
在本实施例中,位移弹簧设置有三个,三个位移弹簧分别为第一位移弹簧、第二位移弹簧、第三位移弹簧,第一位移弹簧设置在操作盘的后端中部,第二位移弹簧和第三位位移弹设置在操作盘的前端两侧,第二位移弹簧和第三位移弹簧对称设置于第一位移弹簧的两侧。
具体的,通过第一位移弹簧、第二位移弹簧、第三位移弹簧分别设置一个等腰三角形的三个顶点上,使干预手柄4和底座1连接稳定,同时方便集散干预手柄4的指令信息量。
变形信息包括变形量,第一位移弹簧、第二位移弹簧和第三位移弹簧的变形量分别为L3、L2和L1,根据变形信息改变自驾仪的操纵指令包括:
根据变形量获取干预指令;
根据干预指令改变自驾仪对无人机的操纵指令;
干预指令包括向右指令计算值、向左指令计算值、向上指令计算值和向下指令计算值,向右指令计算值和向左指令计算值互为相反数,向上指令计算值和向下指令计算值互为相反数;
向右指令计算值通过下述公式一计算:
K
其中,H为位移弹簧的左右跨度,K
向上指令计算值通过下述公式二计算:
K
其中,V为位移弹簧的上下跨度,K
具体的,通过公式一和公式二方便快速计算出向右指令计算值、向左指令计算值、向上指令计算值和向下指令计算值,使无人机指令下达更快速,干预更直观及时。
进一步,初始化指令增益K
在本实施例中,位移弹簧7的一端设置有预紧结构,预紧结构用于调节干预手柄4的操作刚度。
具体的,预紧结构为预紧调节螺纹结构,通过调节预紧结构使干预手柄4操纵刚度改变。
在本实施例中,按钮5最大值行程回弹力不小于0.10公斤,有效触发行程为0.8cm,舒展态按钮5相对安装面高出1.0cm,锁定触发态按钮5相对安装面高出0.4cm。
在本实施例中,操作盘设置有多个与手指相适应的凹槽,且食指内侧隔板(最左侧突起)突出其他隔板不小于0.5cm,外侧隔板(最右侧平齐突起)横向宽度不小于1.0cm,便于手柄受力。
具体的,通过多个与手指相适应的凹槽方便手指持握,便于操纵干预手柄4。
本实施例无人机操纵手柄使用时,以导航无人机降落使用为例,通过按钮5和指示灯6调整操纵手柄,确认手柄状态,通过调整转盘3发送转向指令给自驾仪,进而控制无人机转向,使无人机与航道方向一致,通过油门拨杆2切换无人机动力输出,并通过干预手柄4随时纠正无人机飞行姿态,使无人机平稳降落。
以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
- 一种无人机操纵手柄
- 一种无人机操纵手柄