一种球状果称重分拣精配包装系统
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于自动化系统技术领域,特别的涉及一种球状果称重分拣精配包装系统。
背景技术
在对球状果进行包装时,单个球状果要符合一定的重量标准,目前市场上对于球状果分拣分为人工和机器,人工的分拣方式是在包装前对球果进行单独称重,此方式不仅消耗人力,而且工作效率较低;而分拣包装机器多采用统称方式,所谓统称的方式是将大量的球状果放到框中进行称重,随后对球状果进行包装;但是这种称方式会造成所得到的重量仅为所有球果的重量,无法保证单个球果的重量是否符合包装标准,因此在后续进行包装的时候常常会造成一个包装盒内,会出现一个甚至多个不符合包装标准的球果,在消费者收到货后会引起消费者的不满。
发明内容
基于此,有必要提供一种球状果称重分拣精配包装系统,
为解决上述背景技术中提出的问题。本发明提供如下技术方案:一种球状果称重分拣精配包装系统,包括球果分拣组件和球果称重组件;所述供果组件包括储果箱和一号输送带,所述送果组件包括二号输送带,所述球果分拣组件包括三号输送带、一号电机、果槽称重托盘和分拣程序;所述三号输送带的两端设置有两个一号电机,所述三号输送带上设置有若干果槽,所述果槽上设置有夹果板,所述果槽的底面设置有称重托盘,所述称重托盘底端连接有传感线,所述传感线终端与分拣程序连接,所述三号输送带下面设置有一号支架,所述一号支架上设置有8个漏斗,所述最左端的漏斗底下连接有废果箱;所述球果称重组件包括四号输送带和存果框;所述四号输送带上设置有一号挡板,所述相邻一号挡板之间设置有一号定位槽,所述四号输送带设置在二号支架上,所述四号输送带两端设置有二号电机,所述存果框设置在四号输送带左端,所述存果框底面设置有电子秤;所述毛滚清理组件包括五号输送带、三号电机和一号位置传感器;所述五号输送带右端设置有三号电机,所述三号电机上设置有毛滚,所述三号电机上设置有传动带,所述毛滚通过传动带进行传动连接,所述五号输送带上设有一号位置传感器。
进一步的,所述球果分组组件包括四号下坡道,所述四号下坡道端部设置有分组器和转盘式投果器,所述转盘式投果器上设置有四号定位槽,所述四号定位槽下面设置有二号挡板,二号挡板下面连接有五号下坡道,所述转盘式投果器上设置有六号电机,所述六号电机通过连接板和一号螺栓与转盘式投果器螺栓连接固定。
进一步的,所述球果包装组件包括八号输送带、七号电机、自动落盒机构、自动放膜机构、一号自动封口机构、二号自动封口机构、自动剪膜机构、和废膜回收机构;所述八号输送带两端设置有七号电机,所述八号输送带设置有若干下果孔。
进一步的,所述若干果槽等间距均匀分布在三号输送带上,所述果槽上设置有夹果板。
进一步的,所述相邻一号挡板之间的间距只能容纳一个球果。
进一步的,所述三号电机由五号输送带两端的一号位置传感器控制转动。
进一步的,所述分拣程序与称重托盘通过传感线连接。
进一步的,所述分组器和转盘式投果器同步运动。
进一步的,八号输送带上从右往左分别设置有两套自动落盒机构、转盘式投果器、自动放膜机构、一号自动封口机构和二号自动封口机构。
与现有技术相比,本发明的有益效果是:
通过设置托盘称重进行单个球果的称重,对于不符合标准重量的球果进行挑拣和剔除,通过传送带和分拣程序实现挑拣的自动化;通过设置电子秤用来间接控制每个存果框内球果的重量,使其近似相同,便于后续的包装;本发明通过设置自动落盒机构、自动放膜机构、自动封口机构、自动剪膜机构、通过封口器对包装盒进行封口,使弹簧带动刀片将多余的封膜切除,完成球果的包装工作,无需工人参与,自动化程度较高,极大的减小了人力。
附图说明
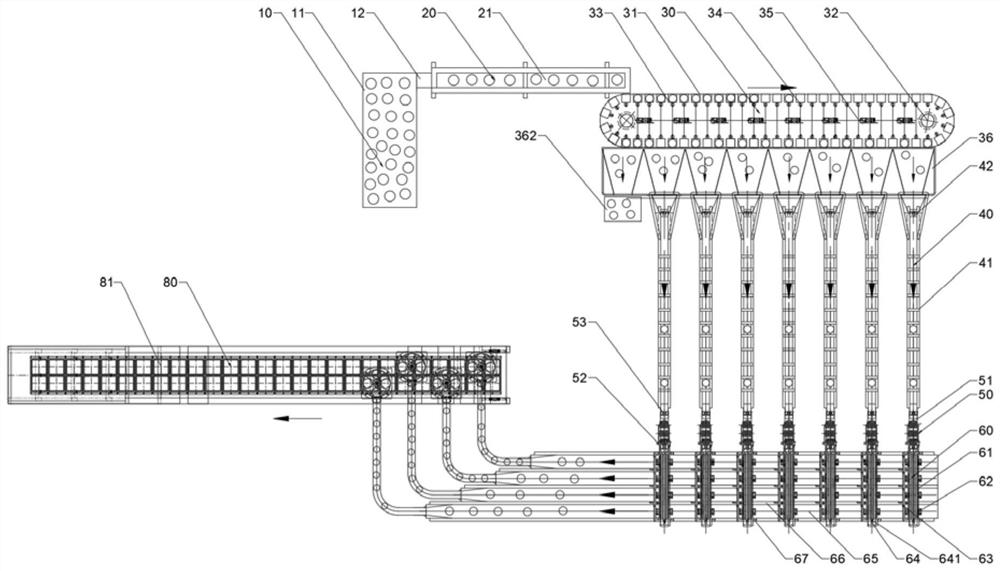
图1为本发明整体结构示意图;
图2为图1中球果分拣组件的示意图;
图3为图1中球果称重组件的俯视图;
图4为图1中球果称重组件的侧视图;
图5为图1中毛滚清理组件的示意图;
图6为图1中球果下果组件的剖面图;
图7为图1中球果分组组件的示意图;
图8为图1中球果分组组件的剖面图;
图9为图1中球果包装组件的局部图;
图10为图1中球果包装组件的局部图。
图中:10、供果组件;11、储果箱;12、一号输送带;20、送果组件;21、二号输送带;30、球果分拣组件;31、三号输送带;32、一号电机;33、果槽;331、夹果板;34、称重托盘;341、传感线;35、分拣程序;36、一号支架;361、漏斗;362、废果箱;40、球果称重组件;41、四号输送带;411、一号挡板;412、一号定位槽;413、二号电机;414、二号支架;42、存果框;421、电子秤;50、毛滚清理组件;51、五号输送带;52、三号电机;521、毛滚;522、传动带;53、一号位置传感器;531、一号下坡道;60、下果组件;61、六号输送带;611、二号定位槽;62、支撑板;621、二号下坡道;63、开关;64、四号电机;641、二号位置传感器;65、七号输送带;651、三号定位槽;66、分隔板;67、五号电机;70、球果分组组件;71、四号下坡道;72、分组器;73、转盘式投果器;731、四号定位槽;7311、五号下坡道;732、一号连杆;733、二号挡板;74、六号电机;741、连接板;7411、一号螺栓;80、球果包装组件;81、八号输送带;811、下果孔;82、七号电机;83、自动落盒机构;84、自动放膜机构;85、一号自动封口机构;851、一号封口器;86、二号自动封口机构;861、二号封口器;87、自动剪膜机构;871、剪切器;88、废膜回收机构。
具体实施方式
下面结合实施例对本发明做进一步的描述。
以下实施例用于说明本发明,但不能用来限制本发明的保护范围。实施例中的条件可以根据具体条件做进一步的调整,在本发明的构思前提下对本发明的方法简单改进都属于本发明要求保护的范围。
请参阅图1到图3,本发明提供一种球状果称重分拣精配包装系统,包括供果组件10、送果组件20、球果分拣组件30、球果称重组件40、毛滚清理组件50、下果组件60、球果分组组件70和球果包装组件80;所述供果组件10包括储果箱11和一号输送带12,所述送果组件20包括二号输送带21,所述球果分拣组件30包括三号输送带31、一号电机32、果槽33称重托盘34和分拣程序35;所述三号输送带31的两端设置有两个一号电机32,所述三号输送带31通过一号电机32进行重复输送作业,所述三号输送带31上设置有若干果槽33,所述若干果槽33间距均匀分布,所述果槽33上设置有夹果板331,通过夹果板331的作用防止球果掉落,所述果槽33的底面设置有称重托盘34,所述称重托盘34底端连接有传感线341,所述传感线341终端与分拣程序35连接,所述三号输送带31下面设置有一号支架36,所述一号支架36上设置有8个漏斗361,所述最左端的漏斗361底下连接有废果箱362;球果作用在果槽33底部的称重托盘34上,通过分拣程序35得出球果的重量是否符合包装标准,若球果重量符合包装标准,则分拣程序35做出反应使符合包装标准的果槽33里面的球果掉落进漏斗361,若球果重量不符合包装标准,则分拣程序35做出反应使不符合包装标准的果槽33里面的球果掉落进废果箱362。
请参阅图1、图3和图4,所述球果称重组件40包括四号输送带41和存果框42;所述四号输送带41上设置有一号挡板411,所述相邻一号挡板411之间的间距只能容纳一个球果,所述相邻一号挡板411之间设置有一号定位槽412,球果在一号挡板411之间的一号定位槽412上,防止球果在输送的过程中脱落四号输送带41,所述四号输送带41设置在二号支架414上,所述四号输送带41两端设置有二号电机413,所述存果框42设置在四号输送带41左端,所述存果框42底面设置有电子秤421,通过电子秤421进行存果框42的称重,保证每一存果框42的球果重量接近相同。
请参阅图1和图5,所述毛滚清理组件50包括五号输送带51、三号电机52和一号位置传感器53;所述五号输送带51右端设置有三号电机52,所述三号电机52上设置有毛滚521,所述毛滚521设置有三个等间距设置在五号输送带51上,所述三号电机52上设置有传动带522,所述毛滚521通过传动带522进行传动连接,所述毛滚521在三号电机52和传动带522的作用下同步转动对球果表面进行清理,所述五号输送带51上设一号位置传感器53,所述一号位置传感器53下面设置有一号下坡道531,所述三号电机52由一号位置传感器53控制转动,所述一号位置传感器53设置在五号输送带51两端,当球果到达五号输送带51入口处时,触发一号位置传感器53,此时三号电机52转动带动毛滚521对球果进行清理,当球果触发五号输送带51出口处的一号位置传感器53时三号电机52停止转动。
请参阅图1和图6,所述下果组件60包括六号输送带61、支撑板62、开关63、四号电机64、七号输送带65、分隔板66和五号电机67;所述六号输送带61上设置有二号定位槽611防止球果脱落,六号输送带61上等分设置有四个支撑板62,所述支撑板62下面设置有二号下坡道621与支撑板62连接,所述一个开关63对应一个支撑板62连接,保证开关63单独控制支撑板62的开合,所述六号输送带61末端设置有四号电机64,所述四号电机64上设置有二号位置传感器641,当球果到达指支撑板62位置,支撑板62与二号下坡道621连接时,二号位置传感器641发出信号作用在开关63上,开关63作用支撑板62打开,当支撑板62打开时,球果从支撑板62处掉落沿着二号下坡道621滚动到七号输送带65上,所述七号输送带65上设置有分隔板66,所述与二号下坡道621设置在两个分隔板66之间保证球果从二号下坡道621滑落时精准到达七号输送带65的三号定位槽651上。
请参阅图1、图7和图8,所述球果分组组件70包括四号下坡道71,所述四号下坡道71端部设置有分组器72和转盘式投果器73,所述转盘式投果器73上设置有四号定位槽731,所述四号定位槽731下面设置有二号挡板733,二号挡板733下面连接有五号下坡道7311,所述分组器72和转盘式投果器73同步运动,所述转盘式投果器73上设置有六号电机74,所述六号电机74通过一号连杆732控制二号挡板733的开合,所述六号电机74通过连接板741和一号螺栓7411与转盘式投果器73螺栓连接固定进而带动转盘式投果器73旋转;在球果到达分组器72时,分组器72作用使转盘式投果器73转动使四号定位槽731位于分组器72前,随后分组器72打开,球果落入四号定位槽731中,循环进行四次运动,当四个四号定位槽731装满球果后,二号挡板733打开,球果沿着五号下坡道7311掉落。
请参阅图1、图9和图10,所述球果包装组件80包括八号输送带81、七号电机82、自动落盒机构83、自动放膜机构84、一号自动封口机构85、二号自动封口机构86、自动剪膜机构87、和回收废膜机构88;所述八号输送带81两端设置有七号电机82,所述八号输送带81设置有若干下果孔811,八号输送带81上从右往左分别设置有两套自动落盒机构83、转盘式投果器73、自动放膜机构84、一号自动封口机构85和二号自动封口机构86,球果包装盒通过自动落盒机构83放置到八号输送带81上,在七号电机82的作用下向左运动,到达转盘式投果器73时,球果沿着五号下坡道7311掉落到包装盒中,继续向前经过自动放膜机构84时,自动放膜机构84作用在包装盒上进行放膜,到达一号自动封口机构85时,通过一号自动封口机构85的一号封口器851对包装盒进行一号位置的封口,到达二号自动封口机构86时,通过二号自动封口机构86的二号封口器861对包装盒进行二号位置的封口,在到达自动剪膜机构87时,通过剪切器871对多余包装的膜进行剪切,最后到达废膜回收机构时对剪切下来的废膜进行回收,完成对球果的分拣和包装。
本发明的工作原理及使用流程:首先供果组件10将球果从储果箱11中运输出来,通过一号传送带11然后球果输送到二号输送带21上,通过二号输送带21输送到三号输送带31上,球果落入三号输送带31上的果槽33通过夹果板331夹紧球果,在球果掉落到果槽33内时,作用在称重托盘34上,通过传感线341反馈到分拣程序35上,分拣程序35根据球果重量判断该球果是否符合包装标准,若球果重量符合包装标准,则分拣程序35做出反应使符合包装标准的果槽33里面的球果掉落进漏斗361,若球果重量不符合包装标准,则分拣程序35做出反应使不符合包装标准的果槽33里面的球果掉落进废果箱362,符合包装标准的球果通过漏斗361落进存果框42内,通过存果框42底部的电子秤421得出球果的总重量,球果落进通过四号输送带41上的一号挡板411之间,通过四号输送带41输送,到达五号输送带51处触发一号位置传感器53,进而三号电机52转动带动毛滚521作用在球果表面进行表面清洁,随后到达六号输送带61上,四号电机64带动六号输送带61运动,在球果距离二号位置传感器641一定的距离时,二号传感器641作用在开关63上,进而支撑板62打开,球果沿着二号下坡道621落入七号输送带65上,在五号电机67的作用下,球果向前运动在四号下坡道71的作用下到达分组器72,在分组器72的作用下,转盘式投果器73旋转,随后分组器72打开,球果落入四号定位槽731内,当四个四号定位槽731内放满球果时,二号挡板733打开,球果沿着五号下坡道7311落入有自动落盒机构83摆放的包装盒内,继续向前经过自动放膜机构84时,自动放膜机构84作用在包装盒上进行放膜,到达一号自动封口机构85时,通过一号自动封口机构85的一号封口器851对包装盒进行一号位置的封口,到达二号自动封口机构86时,通过二号自动封口机构86的二号封口器861对包装盒进行二号位置的封口,在到达自动剪膜机构87时,通过剪切器871对多余包装的膜进行剪切,最后到达废膜回收机构时对剪切下来的废膜进行回收,完成对球果的分拣和包装。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种医院静配中心机械手分拣系统
- 一种高精度称重、包装过程无扬尘的活性炭包装机及其包装方法
- 一种电子秤、自动称重包装打码系统及其工作方法
- 一种果蔬称重分拣系统
- 一种适用于球状果蔬的多级缓冲称重处理设备