一种参数鲁棒性无刷双馈电机解耦抗扰控制方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明属于电机控制技术领域,具体涉及一种参数鲁棒性无刷双馈电机解耦抗扰控制方法。
背景技术
无刷双馈电机(Brushless Doubly-Fed Machine,BDFM)作为一种新型交流电机,因为其结构上具有的诸多优点,近年来引起了越来越多的关注和研究。这种电机定子上都会布置有两套绕组,并且这两套绕组间彼此独立。其中,与电网直接相连的一套定子绕组称为功率绕组(Power Winding,PW),另外一套定子绕组则称为控制绕组(Control Winding,CW)。电机转子上只存在一套经过特殊设计的绕组(Rotor Winding,RW),通过这个转子的调制,实现两套定子绕组磁场的间接耦合,从而完成电机的机电能量转换。
无刷双馈电机运行模式多样,可以实现异步或同步运行。其容错稳定性相较于传统电机大幅提升,且只要电机的功率绕组和控制绕组按照不同的电压等级进行设计,就可以实现利用低压变频器控制高压电机的目的,这极大地降低了调速系统的成本。并且其控制目标中存在无功项,可以实现单位功率因数控制,但目前控制方法都极其依赖电机参数进行电流环方程解耦,若参数不准确,利用解耦后方程设计的控制器性能难以得到保证。且传统控制器的抗扰性能较差,尤其是在速度环,负载突变引起的动态过程取决于控制器的带宽,但往往带宽极限也无法满足更高响应速度的需求。
发明内容
本发明的目的是针对现有技术存在的上述问题,提供一种能够有效提高动态响应速度的参数鲁棒性无刷双馈电机解耦抗扰控制方法。
为实现以上目的,本发明的技术方案如下:
一种参数鲁棒性无刷双馈电机解耦抗扰控制方法,依次包括以下步骤:
步骤A、搭建无刷双馈电机的电流环和转速环模型;
步骤B、根据电流环和转速环模型建立自抗扰控制器,所述自抗扰控制器包括d轴电流环自抗扰控制器、q轴电流环自抗扰控制器以及转速环自抗扰控制器;
步骤C、采用建立的自抗扰控制器对无刷双馈电机进行解耦抗扰控制。
步骤A中,所述电流环模型为:
上式中,i
所述转速环模型为:
上式中,ω
步骤B中,所述d轴电流环自抗扰控制器、q轴电流环自抗扰控制器的建立方法包括:基于电流环模型,将电流状态变量以外的项均视为干扰,利用线性扩张状态观测器进行观测并前馈,利用电流前馈值与指令值设计控制律。
所述d轴电流环自抗扰控制器的控制律为:
上式中,u为d轴电流环自抗扰控制器的输出,b
所述q轴电流环自抗扰控制器的控制律为:
上式中,u为q轴电流环自抗扰控制器的输出,b
步骤B中,所述转速环自抗扰控制器的建立方法包括:基于转速环模型,将控制绕组d轴电流状态变量以外的项均视为干扰,利用线性扩张状态观测器进行观测后前馈补偿,并将转子角速度与转矩设为状态量构建转矩线性扩张状态观测器,观测转矩变化,前馈至转速环输出。
所述转速环自抗扰控制器的控制律为:
上式中,u
所述自抗扰控制器还包括无功PI控制器,所述无功PI控制器用于控制控制绕组q轴电流以实现无功为0,无功PI控制器基于如下公式、根据q轴功率电流反馈进行设计:
所述步骤C依次包括以下步骤:
S1、对于d轴电流环自抗扰控制器,将控制绕组的d轴电流i
S2、将转子的理想角速度
S3、将控制绕组的d轴理想电流
S4、将控制绕组的d轴理想电流
所述自抗扰控制器还包括无功PI控制器;
所述步骤S2还包括:
将功率绕组的q轴理想电流值0与其反馈值相减后带入无功PI控制器得到控制绕组的q轴理想电流
所述步骤C还包括:
S0、设定无刷双馈电机的转子的理想角速度
与现有技术相比,本发明的有益效果为:
1、本发明一种参数鲁棒性无刷双馈电机解耦抗扰控制方法先搭建无刷双馈电机的电流环和转速环模型,再根据电流环和转速环模型建立自抗扰控制器,且自抗扰控制器包括d轴电流环自抗扰控制器、q轴电流环自抗扰控制器以及转速环自抗扰控制器,然后采用建立的自抗扰控制器对无刷双馈电机进行解耦抗扰控制,该方法对于d轴电流环自抗扰控制器、q轴电流环自抗扰控制器的设计,利用线性扩张状态观测器进行干扰估计,干扰中包含其耦合项,且控制器的设计只需要b
2、本发明一种参数鲁棒性无刷双馈电机解耦抗扰控制方法基于转速环模型,将控制绕组d轴电流状态变量以外的项均视为干扰,利用线性扩张状态观测器进行观测后前馈补偿,将转子角速度与转矩设为状态量构建转矩线性扩张状态观测器,观测转矩变化,前馈至转速环输出,即构建了带转矩前馈补偿的转速环自抗扰控制器,该控制器利用扩张状态观测器选取不同变量作为状态量,一方面使得电机系统内部和外部的扰动都能被设计线性扩张状态观测器进行补偿,另一方面,当负载转矩发生突变时,矩阵设计线性扩张状态观测器能够更快速的观测并进行前馈,提高了其转速动态响应速度。
附图说明
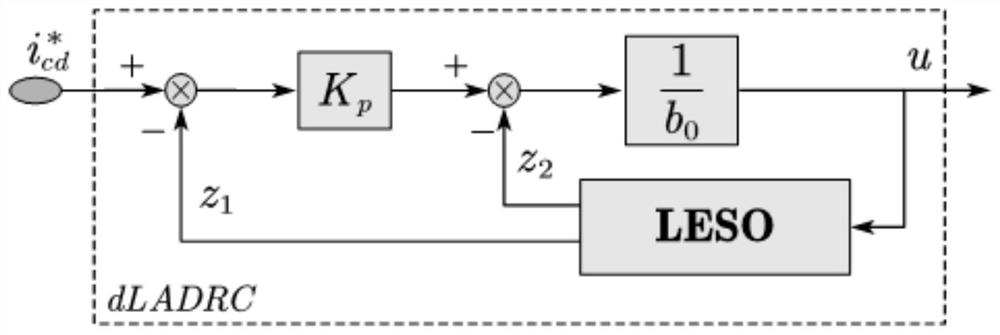
图1为d轴电流环自抗扰控制器的结构图。
图2为q轴电流环自抗扰控制器的结构图。
图3为转速环自抗扰控制器的结构图。
图4为无功PI控制器的结构图。
图5为无刷双馈电机矢量控制总体结构图。
图6为传统电流环解耦电流指令跟踪波形图。
图7为本发明的电流指令跟踪波形图。
图8为传统转速环与本发明采用的TLADRC转速环的转速跟踪及负载突变动态响应对比图。
具体实施方式
下面结合具体实施方式以及附图对本发明作进一步详细的说明。
转速环自抗扰控制器:本发明所述转速环自抗扰控制器中传统自抗扰控制部分的控制律为:
实施例1:
一种参数鲁棒性无刷双馈电机解耦抗扰控制方法,依次按照以下步骤进行:
1、搭建无刷双馈电机的电流环和转速环模型。
电压方程如下:
磁链方程如下:
上式中,u
i
上式中,i
功率绕组定向时,θ
θ
当同步旋转坐标系的d轴定向于功率绕组电压矢量U
代入式2,可得:
式6代入式1,可得:
式7代入式1,可得:
上式中,ψ
上式揭示了控制绕组电压与控制绕组电流之间的关系,即通过控制控制绕组电压可以得到适当的控制绕组的电流。为了控制控制绕组,需要消去功率绕组电流的导数。
将式6代入转子磁链方程,得:
令
将功率绕组电流导数替换至控制绕组电压方程:
功率绕组电压矢量定向或磁链矢量定向的目的是为了得到控制绕组电流d轴分量和q轴分量的解耦。对功率绕组电压矢量定向而言,理想的情况是控制绕组电流d轴分量与电机电磁转矩相对应,q轴分量与功率绕组无功功率相对应,这样,通过对控制绕组d轴电流和q轴电流分别进行控制,就能实现电机转矩和无功功率的解耦控制,从而获得理想的系统动态响应特性。
根据式10,在稳态时,忽略微分项,可得:
上式中,由于转子电阻较小,而ω
上式表明了控制绕组与功率绕组间的耦合关系,通过控制绕组d轴电流可以对功率绕组d轴电流、进行控制,而通过控制绕组q轴电流可以对功率绕组q轴电流进行控制。
功率绕组的有功功率和无功功率可以分别通过下式进行计算:
电机电磁转矩与控制绕组电流间的关系为:
综上,电流环模型可写为:
上式中,
转速环模型可写为:
上式中,b
2、基于电流环模型,将电流状态变量以外的项均视为干扰,利用线性扩张状态观测器进行观测,前馈后实现少参数依赖的解耦效果,利用电流前馈值与指令值设计控制律。
以d轴为例,令x
y=Cx
其中,x=[x
设计线性扩张状态观测器LESO:
其中,z=[z
β
K
其中,β
设计如下d轴电流环自抗扰控制器的控制率:
d轴电流环自抗扰控制器dLADRC的结构如图1所示,控制器设计只需要b
q轴电流环自抗扰控制器qLADRC的设计与d轴同理,其结构如图2所示,控制律为:
3、基于转速环模型,将控制绕组d轴电流状态变量以外的项均视为干扰,利用线性扩张状态观测器进行观测后前馈补偿,将转子角速度与转矩设为状态量构建转矩线性扩张状态观测器,观测转矩变化,前馈至转速环输出,实现转矩突变后的快速动态响应。
令x
y=Cx
其中,x=[x
设计线性扩张状态观测器LESO:
其中,z=[z
β
K
在实际控制器采样周期内,一般认为负载转矩未发生变化,即:
令x
y=Cx
其中,x=[x
设计转矩线性扩张状态观测器TLESO:
其中,z=[z
β
设计如下转速环自抗扰控制器的控制率:
转速环自抗扰控制器TLADRC的结构如图3所示,电机系统内部和外部的扰动都能被LESO进行补偿,且当负载转矩发生变化时,TLESO能够更快速的观测并进行前馈,提高动态响应速度。
4、基于如下无功表达式、根据q轴功率电流反馈,设计如图4所示的PI控制器控制控制绕组q轴电流实现无功为0控制:
PI控制器表达式如下:
其中,S为拉普拉斯算子。
最终构建出如图5所示的无刷双馈电机矢量控制结构图。
5、通过微控制器设定无刷双馈电机的转子机械参考转速
6、通过安装在无刷双馈电机上的位置编码器获得电机的转子角速度ω
7、对于d轴电流环自抗扰控制器,将控制绕组的d轴电流i
8、将转子的理想角速度
9、将控制绕组的d轴理想电流
10、将控制绕组的d轴理想电流
为验证本发明所提控制方法的有效性和优越性,进行如下实验:
(1)断开转速环与功率环,设置控制绕组电流指令
通过对比图6、图7可知,与传统电流环相比,本发明所采用的电流环自抗扰控制器具有更高的抗扰性能,拥有更高频的电流跟踪能力,响应更快。
(2)将转速指令设置为800r/min,功率绕组的q轴电流指令为0,负载转矩在1.5秒时由0Nm阶跃至50Nm。第一组的电流环、转速环与功率环均采用传统PI控制器;第二组的功率环采用传统PI控制器,电流环采用本发明所述电流环自抗扰控制器,转速环采用本发明所述转速环自抗扰控制器,考察各自的系统动态响应性能。两种方法的转速跟踪及负载突变动态响应结果如图8所示。
由图8可知,相比传统电流环和转速环,本发明所采用的转速环无论是针对阶跃的速度信号或是负载突变,都能更快进行响应,极大的提高了转速和电流的控制精度。
- 基于自抗扰控制技术的无刷双馈风力发电机解耦方法
- 无刷双馈风力发电机及无刷双馈风力发电系统控制方法