基于5G网络的智能工业机器人管控系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及机器人管控领域,具体涉及基于5G网络的智能工业机器人管控系统。
背景技术
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中;
工业机器人在系统化的使用时,需要使用到工业机器人管控系统来进行智能化的工业机器人综合管控。
现有的机器人管控系统,管控类型的单一,不能很好的保护工业机器人,智能化程度较低,给机器人管控系统的使用带来了一定的影响,因此,提出基于5G网络的智能工业机器人管控系统。
发明内容
本发明所要解决的技术问题在于:如何解决现有的机器人管控系统,管控类型的单一,不能很好的保护工业机器人,智能化程度较低,给机器人管控系统的使用带来了一定的影响的问题,提供了基于5G网络的智能工业机器人管控系统。
本发明是通过以下技术方案解决上述技术问题的,本发明包括:机器人信息采集模块,所述机器人信息采集模块用于采集机器人信息、机器人信息包括机器人数量信息、机器人单位时间工作量信息、机器人运行时长信息、机器人安装时长与机器人预估寿命;
环境信息采集模块,所述环境信息采集模块用于采集机器人工作环境信息,环境信息包括环境温度信息、环境湿度信息与环境粉尘浓度信息;
生产量信息采集模块,所述生产量信息采集模块用于采集预设的生产量信息与预设生产结束时间信息;
检修维护信息采集模块,所述检修维护信息采集模块用于采集预设时长内的机器人检修次数信息;
电力信息采集模块,所述电力信息采集模块供电设备信息,供电设备信息包括正常用电信息与备用电设备信息,所述正常用电信息包括电流波动信息,所述备用电设备信息包括备用电设备实际储电量信息与备用电设备标准电量信息;
运行状态采集模块,所述运行状态采集模块用于采集智能工业机器的运行状态信息采集智能工业机器的运行状态信息,运行状态信息为运行声音信息;
所述机器人管控系统对环境信息进行处理生成环境警示信息,对环境信息与检修维护信息进行处理生成检修频率制定信息;
所述机器人管控系统对生产量信息与机器人信息进行处理生成机器人调控信息,所述机器人管控系统对机器人信息进行处理生成机器人控制信息;
所述机器人管控系统对运行状态信息进行处理生成机器人状态评估信息;
所述机器人管控系统对供电设备信息进行处理生成供电警示信息。
进一步在于,所述检修频率制定信息包括增加检修信息、减少检修信息与维持检修信息,所述检修频率制定信息的具体处理过程如下:
步骤一:提取出采集到的环境信息与检修维护信息,从环境信息中获取到环境温度信息、环境湿度信息与环境粉尘浓度信息,将其分别标记为K、Q、和F;
步骤二:在预设时长内连续采集x次环境温度信息K、环境湿度信息Q与环境粉尘浓度信息F之后依次计算出环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff;
步骤三:再从检修维护信息中提取出机器人检修次数信息,将其分别标记为W;
步骤四;当环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff大于预设值时,提取出机器人检修次数信息W,当机器人检修次数信息W小于预设次数a1时,即生成增加检修信息,当机器人检修次数信息W为预设次数时a1,即生成维持检修信息,当机器人检修次数信息W大于a1预设次数时,即生成减少检修信息;
步骤五:当环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff中至少两个大于预设值时,提取出机器人检修次数信息W,当机器人检修次数信息W小于预设次数a2时,即生成增加检修信息,当机器人检修次数信息W为预设次数时a2,即生成维持检修信息,当机器人检修次数信息W大于a2预设次数时,即生成减少检修信息;
步骤六:步骤:当环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff中任意一个大于预设值时,提取出机器人检修次数信息W,当机器人检修次数信息W小于预设次数a3时,即生成增加检修信息,当机器人检修次数信息W为预设次数时a3,即生成维持检修信息,当机器人检修次数信息W大于a3预设次数时,即生成减少检修信息;
a1>a2>a3。
进一步在于,所述机器人调控信息包括机器人增加信息与机器人停机信息,所述机器人调控信息的具体处理过程如下:提取出采集到的生产量信息与机器人信息,从生产量信息中获取到预设的生产量信息与预设生产结束时间信息,将预设的生产量信息标记为Y,将预设生产结束时间信息标记为Td,再从机器人信息中获取机器人数量信息、机器人单位时间工作量信息、机器人运行时长信息,将机器人数量信息、机器人单位时间工作量信息、机器人运行时长信息分别标记为Z1、Z2和Z3,其中机器人运行时长信息为机器人单日标准工作时长信息。计算出预设生产结束时间信息Td与采集数据时的时间点之间的差值获取到剩余时长Ttd,通过公式(Z1*Z2*Z3)/Y-Ttd=Zt,获取到完工评估时长信息Zt,连续采集m次完工评估时长信息Zt,m≥3,当完工评估时长信息Zt小于预设的数量超过预设次数时,即生成机器人增加信息,当Zt大于预设值时,即生成机器人停机信息。
进一步在于,所述环境警示信息的具体处理过程如下:提取出采集到的环境温度信息、环境湿度信息与环境粉尘浓度信息,当环境温度信息、环境湿度信息与环境粉尘浓度信息中任意一个大于预设超过预设时长,或者任意一个大于警示值时,即生成环境警示信息。
进一步在于,所述机器人状态评估信息包括机器人状态正常与机器人状态异常信息,所述机器人状态评估信息的具体处理过程如下:提取出采集到的运行状态信息,从运行状态信息中获取到运行声音信息,对运行声音进行声纹化处理,获取到机器人实时运行声纹信息,在机器人安装时设置了预设的运行声纹信息,将实时运行声纹信息与预设的运行声纹信息进行比对,当实时运行声纹信息与预设的运行声纹信息相似度小于预设值时,即生成机器人状态异常信息,当实时运行声纹信息与预设的运行声纹信息相似度大于预设值时,即生成机器人状态正常信息。
进一步在于,所述供电警示信息的具体处理过程如下:提取出采集到的供电设备信息从供电设备信息中获取到正常用电信息与备用电设备信息,当电流波动信息中的波动幅度大于预设值幅度超过预设时长,即生成供电警示信息,从备用电设备信息中提取出备用电设备实际储电量信息与备用电设备标准电量信息,计算出备用电设备实际储电量信息与备用电设备标准电量信息之间的比值得到实际电量占比,当实际电量占比小于预设值时,即生成供电警示信息。
进一步在于,所述机器人管控系统对机器人安装时长、机器人预估寿命与检修维护信息进行处理生成检修增加信息,检修增加信息的具体处理过程如下;当计算出机器人安装时长与机器人预估寿命的比值获取到比较参数,比较参数大于预设值,且检修维护信息中的机器人检修次数信息,当机器人检修次数信息小于预设值时,即生成检修增加信息。
本发明相比现有技术具有以下优点:该基于5G网络的智能工业机器人管控系统,通过实际上的生产需求和机器人的实际生成效率进行处理,在需要进行大量加工时智能化的控制机器的数量增加,在加工量少时,智能控制部分机器人停止运行,从而在保证生产效率的同时,减少了不必要的资源浪费,同时对工业机器人进行了细化的检修状态分析,根据工业机器人所在工作环境制定不同的检修频率,从而保证工业机器的故障等能够被及时的发现,更好的保护了工业机器人,延长了工业机器人的使用寿命,并且实时监测工业机器人的运行声音信息,当发现其异常时,及时发出警示信息进行提示,从而进一步的提升了该系统对工业机器人的安全保护,实现了全面的对工业机器人的综合管控,让该系统更加值得推广使用。
附图说明
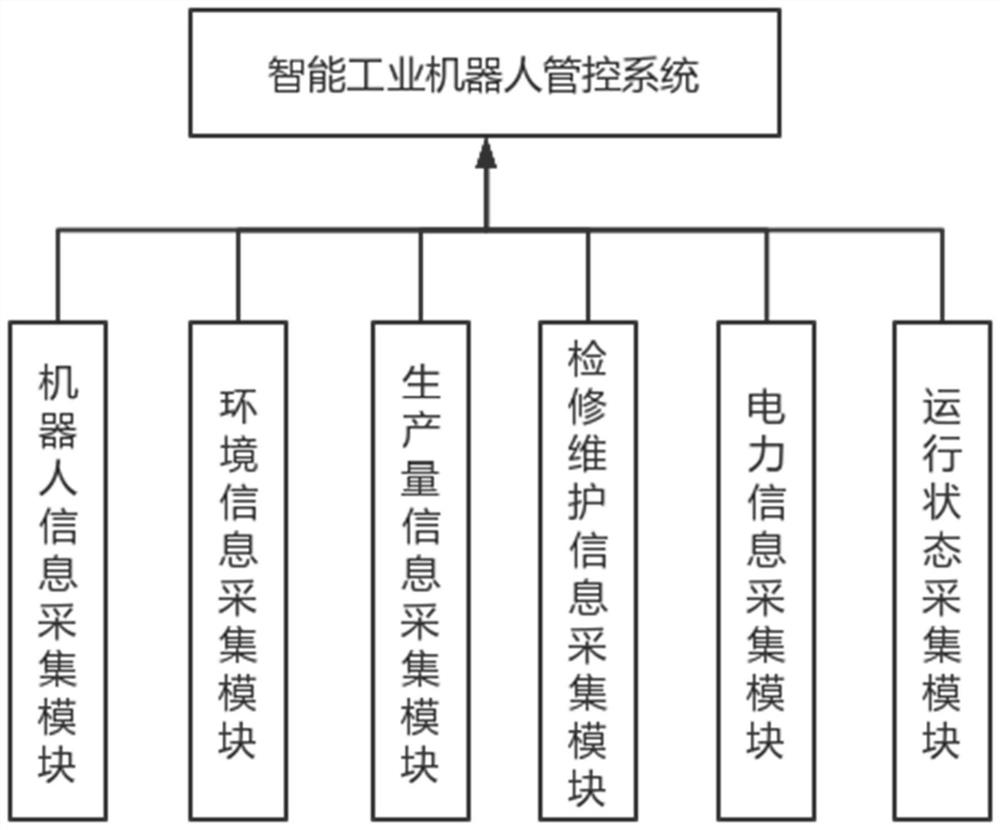
图1是本发明的结构框图。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
如图1所示,本实施例提供一种技术方案:基于5G网络的智能工业机器人管控系统,包括:机器人信息采集模块,所述机器人信息采集模块用于采集机器人信息、机器人信息包括机器人数量信息、机器人单位时间工作量信息、机器人运行时长信息、机器人安装时长与机器人预估寿命;
环境信息采集模块,所述环境信息采集模块用于采集机器人工作环境信息,环境信息包括环境温度信息、环境湿度信息与环境粉尘浓度信息;
生产量信息采集模块,所述生产量信息采集模块用于采集预设的生产量信息与预设生产结束时间信息;
检修维护信息采集模块,所述检修维护信息采集模块用于采集预设时长内的机器人检修次数信息;
电力信息采集模块,所述电力信息采集模块供电设备信息,供电设备信息包括正常用电信息与备用电设备信息,所述正常用电信息包括电流波动信息,所述备用电设备信息包括备用电设备实际储电量信息与备用电设备标准电量信息;
运行状态采集模块,所述运行状态采集模块用于采集智能工业机器的运行状态信息采集智能工业机器的运行状态信息,运行状态信息为运行声音信息;
所述机器人管控系统对环境信息进行处理生成环境警示信息,对环境信息与检修维护信息进行处理生成检修频率制定信息;
所述机器人管控系统对生产量信息与机器人信息进行处理生成机器人调控信息,所述机器人管控系统对机器人信息进行处理生成机器人控制信息;
所述机器人管控系统对运行状态信息进行处理生成机器人状态评估信息;
所述机器人管控系统对供电设备信息进行处理生成供电警示信息。
所述检修频率制定信息包括增加检修信息、减少检修信息与维持检修信息,所述检修频率制定信息的具体处理过程如下:
步骤一:提取出采集到的环境信息与检修维护信息,从环境信息中获取到环境温度信息、环境湿度信息与环境粉尘浓度信息,将其分别标记为K、Q、和F;
步骤二:在预设时长内连续采集x次环境温度信息K、环境湿度信息Q与环境粉尘浓度信息F之后依次计算出环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff;
步骤三:再从检修维护信息中提取出机器人检修次数信息,将其分别标记为W;
步骤四;当环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff大于预设值时,提取出机器人检修次数信息W,当机器人检修次数信息W小于预设次数a1时,即生成增加检修信息,当机器人检修次数信息W为预设次数时a1,即生成维持检修信息,当机器人检修次数信息W大于a1预设次数时,即生成减少检修信息;
步骤五:当环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff中至少两个大于预设值时,提取出机器人检修次数信息W,当机器人检修次数信息W小于预设次数a2时,即生成增加检修信息,当机器人检修次数信息W为预设次数时a2,即生成维持检修信息,当机器人检修次数信息W大于a2预设次数时,即生成减少检修信息;
步骤六:步骤:当环境温度均值Kk,环境湿度均值Qq与环境粉尘浓度均值Ff中任意一个大于预设值时,提取出机器人检修次数信息W,当机器人检修次数信息W小于预设次数a3时,即生成增加检修信息,当机器人检修次数信息W为预设次数时a3,即生成维持检修信息,当机器人检修次数信息W大于a3预设次数时,即生成减少检修信息;
a1>a2>a3;
通过上述过程,实现了根据机器人所处环境和其实际的检修频率来智能化进行机器人维护次数的增加和减少,让处于恶劣工作环境的机器人能够进行频率更高的检修维护,从而能够及时的发现机器人的故障信息,及时的排除故障延长工业机器人的使用寿命。
所述机器人调控信息包括机器人增加信息与机器人停机信息,所述机器人调控信息的具体处理过程如下:提取出采集到的生产量信息与机器人信息,从生产量信息中获取到预设的生产量信息与预设生产结束时间信息,将预设的生产量信息标记为Y,将预设生产结束时间信息标记为Td,再从机器人信息中获取机器人数量信息、机器人单位时间工作量信息、机器人运行时长信息,将机器人数量信息、机器人单位时间工作量信息、机器人运行时长信息分别标记为Z1、Z2和Z3,其中机器人运行时长信息为机器人单日标准工作时长信息。计算出预设生产结束时间信息Td与采集数据时的时间点之间的差值获取到剩余时长Ttd,通过公式(Z1*Z2*Z3)/Y-Ttd=Zt,获取到完工评估时长信息Zt,连续采集m次完工评估时长信息Zt,m≥3,当完工评估时长信息Zt小于预设的数量超过预设次数时,即生成机器人增加信息,当Zt大于预设值时,即生成机器人停机信息;
通过上述过程,能够智能化的根据实际生产情况来增减工业机器人的数量,在保证了产量符合需求的同时,避免了资源浪费。
所述环境警示信息的具体处理过程如下:提取出采集到的环境温度信息、环境湿度信息与环境粉尘浓度信息,当环境温度信息、环境湿度信息与环境粉尘浓度信息中任意一个大于预设超过预设时长,或者任意一个大于警示值时,即生成环境警示信息;
通过上述过程,能够在工业机器人所在环境异常时,及时的生成警示信息进行警示,减少工业机器人长时间处于恶劣环境工作。
所述机器人状态评估信息包括机器人状态正常与机器人状态异常信息,所述机器人状态评估信息的具体处理过程如下:提取出采集到的运行状态信息,从运行状态信息中获取到运行声音信息,对运行声音进行声纹化处理,获取到机器人实时运行声纹信息,在机器人安装时设置了预设的运行声纹信息,将实时运行声纹信息与预设的运行声纹信息进行比对,当实时运行声纹信息与预设的运行声纹信息相似度小于预设值时,即生成机器人状态异常信息,当实时运行声纹信息与预设的运行声纹信息相似度大于预设值时,即生成机器人状态正常信息;
通过对机器人运行时的声音监测,能够从另一方面加快了机器人故障的发现,及时的故障警示,能够加快故障排除的速度,减小机器人故障的生产效率的营销影像。
所述供电警示信息的具体处理过程如下:提取出采集到的供电设备信息从供电设备信息中获取到正常用电信息与备用电设备信息,当电流波动信息中的波动幅度大于预设值幅度超过预设时长,即生成供电警示信息,从备用电设备信息中提取出备用电设备实际储电量信息与备用电设备标准电量信息,计算出备用电设备实际储电量信息与备用电设备标准电量信息之间的比值得到实际电量占比,当实际电量占比小于预设值时,即生成供电警示信息;
通过上述过程,对备用电源和供电电源进行了综合处理,在电力波动异常时,及时的发出警示,来减少电力波动导致机器人损坏的状况发生,同时对备用电源进行监测,当发现储电量较少时也发出警示信息,警示补充电量。
所述机器人管控系统对机器人安装时长、机器人预估寿命与检修维护信息进行处理生成检修增加信息,检修增加信息的具体处理过程如下;当计算出机器人安装时长与机器人预估寿命的比值获取到比较参数,比较参数大于预设值,且检修维护信息中的机器人检修次数信息,当机器人检修次数信息小于预设值时,即生成检修增加信息;
通过上述过程,更进一步的实现了智能化制定检修频率的目的,延长了智能机器人的使用寿命。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 基于5G网络的人工智能高风险作业管控系统
- 一种基于5G通讯网络的智能安防反违章管控系统