高架输送车
文献发布时间:2024-01-17 01:17:49
技术领域
本发明的一个侧面涉及高架输送车。
背景技术
在专利文献1中公开了一种高架输送车,具备:移载容器的升降台(保持部);以及设置于升降台且与容器的上表面接触的容器接触部(定位部)。在专利文献1所记载的高架输送车中,容器接触部相对于升降台在高度方向上移动自如地设置,通过高度检测部(检测部)检测容器接触部相对于升降台的相对的高度位置。
现有技术文献
专利文献
专利文献1:国际公开2018/179931号
发明内容
发明所要解决的课题
在上述高架输送车中,在通过升降台移载容器时,当容器在水平方向上偏移的情况下,与容器的上表面接触的容器接触部有可能在高度方向上移动(例如,由于容器的上表面的凹部、凸部或者倾斜等,该偏移转换成容器接触部向高度方向的移动)。在该情况下,难以通过高度检测部准确地求出容器接触部的高度位置。
因此,本发明的一个侧面的目的在于提供一种能够准确地求出容器接触部相对于升降台的相对的高度位置的高架输送车。
用于解决课题的手段
本发明的一个侧面的高架输送车具备:升降台,移载容器;容器接触部,与容器的上表面接触,设置成相对于升降台沿着高度方向移动自如;以及高度检测部,检测容器接触部相对于升降台的相对的高度位置,容器接触部设置成相对于升降台沿着水平方向移动自如。
在该高架输送车中,在容器在水平方向上偏移的情况下,容器接触部能够与该偏移相应地在水平方向上移动。其结果,能够抑制该偏移转换成容器接触部向高度方向的移动。因此,能够准确地求出容器接触部相对于升降台的相对的高度位置。
在本发明的一个侧面的高架输送车中,也可以为,容器接触部是嵌入在容器的上表面形成的凹部中的定位部。在该情况下,通过容器接触部,能够将升降台相对于容器定位。
也可以为,本发明的一个侧面的高架输送车具备滑动部件,该滑动部件安装于升降台,能够相对于容器接触部沿着水平方向滑动,容器接触部包括收纳滑动部件的收纳空间。由此,能够具体实现容器接触部相对于升降台沿着水平方向移动自如的构成。
也可以为,本发明的一个侧面的高架输送车具备施力部,该施力部对容器接触部施力以使滑动部件位于收纳空间内的规定位置。由此,例如在容器接触部不与容器的上表面接触的无负载时,能够将容器接触部相对于升降台的位置维持为一定。
在本发明的一个侧面的高架输送车中,也可以为,施力部包括设置于滑动部件的第1磁铁、以及设置于容器接触部的第2磁铁。在该情况下,利用第1磁铁以及第2磁铁的磁力,能够将容器接触部相对于升降台的位置维持为一定。
在本发明的一个侧面的高架输送车中,也可以为,收纳空间由设置于容器接触部且向上方开口的开口部划分,高架输送车还具备盖部件,该盖部件堵塞开口部的开口的一部分。在该情况下,通过盖部件,能够阻止滑动部件从收纳空间脱落。
在本发明的一个侧面的高架输送车中,也可以为,在容器接触部与滑动部件之间设置有摩擦系数比容器接触部小的片部件。在该情况下,例如在容器接触部与容器的上表面接触的状态下,在该容器在水平方向上偏移的情况下,通过片部件,使得滑动部件与容器接触部容易滑动。由此,能够抑制容器的上表面与容器接触部滑动,能够抑制容器的上表面的损伤。
在本发明的一个侧面的高架输送车中,也可以为,容器接触部经由摩擦系数比容器接触部大的摩擦部件与容器的上表面接触。由此,例如在容器接触部与容器的上表面接触的状态下,在该容器在水平方向上偏移的情况下,通过摩擦部件,能够抑制容器的上表面与容器接触部滑动,能够抑制容器的上表面的损伤。
在本发明的一个侧面的高架输送车中,也可以为,容器接触部相对于升降台在沿着水平方向的第1方向以及沿着水平方向且与第1方向正交的第2方向上移动自如。由此,在容器不仅在沿着水平方向的第1方向而且在第2方向上也偏移的情况下,容器接触部能够与该偏移相应地在水平方向上移动。
发明效果
根据本发明的一个侧面,能够提供能够准确地求出容器接触部相对于升降台的相对的高度位置的高架输送车。
附图说明
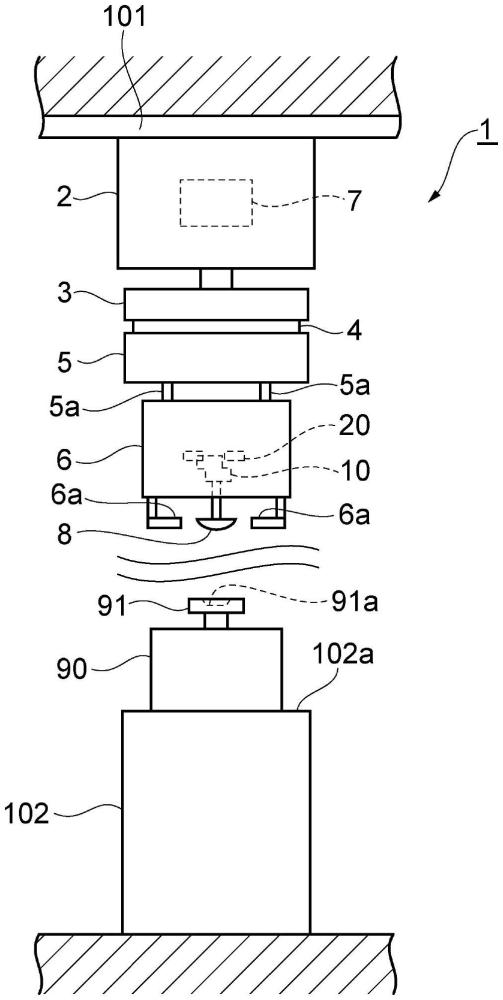
图1是表示第1实施方式的高架输送车的主视图。
图2是表示图1的中心锥体的周边构成的剖视图。
图3是表示图1的升降台的下方立体图。
图4是表示图1的中心锥体的周边构成的局部切口立体剖视图。
图5的(a)是表示通常时的图1的中心锥体的周边构成的剖视图。图5的(b)是放大表示图5的(a)的一部分的剖视图。
图6的(a)是表示FOUP在水平方向上偏移的情况下的图1的中心锥体的周边构成的剖视图。图6的(b)是放大表示图6的(a)的一部分的剖视图。
图7是表示第2实施方式的中心锥体的周边构成的概要剖视图。
图8是表示POD在水平方向上偏移的情况下的图7的中心锥体的周边构成的概要剖视图。
具体实施方式
以下,参照附图对实施方式进行详细说明。另外,在各图中对相同或者相当的部分标注相同的符号,并省略重复的说明。
[第1实施方式]
对第1实施方式进行说明。如图1所示,第1实施方式的高架输送车1沿着铺设在制造半导体器件的无尘室的顶棚附近的行驶轨道101行驶。高架输送车1输送收纳有多张半导体晶片的FOUP(容器)90。高架输送车1对装载口(移载目的地)102进行FOUP90的移载,该装载口设置于对半导体晶片实施各种处理的处理装置。即,高架输送车1回收配置在装载口102的载置面102a的FOUP90,或者在装载口102的载置面102a上配置FOUP90。
高架输送车1具备行驶部2、横向单元3、θ单元4、升降驱动单元5、升降台6以及控制部7。行驶部2例如从沿着行驶轨道101铺设的高频电流线以非接触的方式接受电力的供给,由此沿着行驶轨道101行驶。横向单元3使θ单元4、升降驱动单元5以及升降台6相对于行驶轨道101延伸的方向在横向上移动。θ单元4使升降驱动单元5以及升降台6在水平面内转动。
升降驱动单元5通过放出或者卷取在下端部安装有升降台6的多条带5a,使升降台6升降(在高度方向上移动)。升降台6移载FOUP90。升降台6通过使一对爪部件6a开闭,保持或者开放FOUP90所具有的凸缘部91。控制部7对高架输送车1的各部的动作进行控制。
高架输送车1还具备中心锥体8、挡块10以及高度检测部20。中心锥体8是与FOUP90的上表面接触的容器接触部。中心锥体8是为了进行升降台6相对于FOUP90的定位而嵌入在凸缘部91的上表面形成的凹部91a中的定位部。此处,中心锥体8从下方观察位于升降台6的中央,构成将升降台6的中心位置相对于FOUP90进行定位(定心)的定心部件。中心锥体8、挡块10以及高度检测部20设置于升降台6。
如图2以及图3所示,中心锥体8、挡块10以及高度检测部20由设置于升降台6的基座61的支承部件62支承。在支承部件62固定有一对引导件63。各引导件63是沿着铅垂方向延伸的筒状的部件。在各引导件63中插入杆64。各杆64的上端通过连结部件65相互连结。中心锥体8安装于各杆64的下端。在中心锥体8与各引导件63之间,以插通有各杆64的状态配置有螺旋弹簧66。一对螺旋弹簧66相对于支承部件62向下侧对中心锥体8施力。
根据以上构成,中心锥体8、杆64以及连结部件65将连结部件65与各引导件63的上端抵接的位置作为初始位置,相对于升降台6沿着高度方向(上下方向以及升降方向)移动自如。换言之,中心锥体8、杆64以及连结部件65相对于升降台6上下移动自如。
如图2所示,挡块10包括第1遮光板11以及第2遮光板12。第1遮光板11以及第2遮光板12例如通过金属板一体地形成,固定于连结部件65。由此,第1遮光板11以及第2遮光板12与中心锥体8相对于升降台6的相对的升降动作连动地自如升降。第1遮光板11具有与水平方向平行的第1上端11a以及第1下端11b。第2遮光板12具有与水平方向平行的第2上端12a以及第2下端12b。第1上端11a与第1下端11b之间的距离与第2上端12a与第2下端12b之间的距离相等。第1下端11b以及第2上端12a位于相同的高度(在上下方向上为相同的位置)。
高度检测部20包括第1光断路器21以及第2光断路器22。第1光断路器21以第1遮光板11能够通过其光轴21a上(第1光断路器21的投光部与受光部之间)的方式安装于支承部件62。由此,第1光断路器21能够检测第1遮光板11的位置。第2光断路器22以第2遮光板12能够通过其光轴22a上(第2光断路器22的投光部与受光部之间)的方式安装于支承部件62。由此,第2光断路器22能够检测第2遮光板12的位置。第1光断路器21的光轴21a以及第2光断路器22的光轴22a位于相同的高度(在上下方向上为相同的位置)。在中心锥体8位于初始位置(即,连结部件65与各引导件63的上端抵接的位置)的状态下,第1遮光板11的第1上端11a位于比第1光断路器21的光轴21a靠下侧的位置。
如上所述,构成挡块10的第1遮光板11以及第2遮光板12与中心锥体8相对于升降台6的相对的升降的动作连动地自如升降。构成高度检测部20的第1光断路器21以及第2光断路器22分别能够检测第1遮光板11以及第2遮光板12的位置(从第1光断路器21以及第2光断路器22的各受光部的输出的开启/截止)。即,高度检测部20通过检测挡块10的位置,检测中心锥体8相对于升降台6的相对的高度位置。由此,控制部7基于中心锥体8相对于升降台6的相对的高度位置,例如,识别FOUP90是否存在于装载口102、升降台6是否到达保持位置、以及升降台6是否保持FOUP90的凸缘部91。
接着,对中心锥体8的周边构成进行详细说明。
如图4、图5的(a)以及图5的(b)所示,高架输送车1具有中心锥体8、滑动部件35、盖部件92、第1磁铁93、第2磁铁94以及片部件95。中心锥体8呈向下侧凸出的外形,包括抛物面状的下表面8a。中心锥体8由非磁性体形成,例如由树脂形成。在中心锥体8的上表面8b形成有其边缘部以外凹陷而成的台阶81。在台阶81的底面,在包括俯视时的中心锥体8的中央的位置形成有向上方开口的开口部82。开口部82在俯视时呈与中心锥体8同心的圆形状。在开口部82内收纳有滑动部件35。开口部82划分出收纳滑动部件35的收纳空间R。
滑动部件35是呈圆柱状的部件。滑动部件35由非磁性体形成,例如由树脂形成。滑动部件35例如经由由不锈钢形成的固定凸缘96固定于将各杆64(参照图2)的下端连结的未图示的连结部件。由此,滑动部件35安装于升降台6。如上所述,滑动部件35配置在开口部82(收纳空间R)的内部。滑动部件35的直径小于开口部82的直径。滑动部件35的厚度小于开口部82的深度。滑动部件35在收纳空间R的内部能够相对于中心锥体8沿着水平方向滑动(能够移动)。
盖部件92是堵塞开口部82的开口的一部分的部件。盖部件92是呈在中心具有孔92a的圆板状的部件。盖部件92由非磁性体形成,例如由树脂形成。盖部件92在与中心锥体8同轴的状态下配置在台阶81内,并且固定于中心锥体8。盖部件92堵塞开口部82的开口的外周部。在孔92a中插通固定于滑动部件35的固定凸缘96的一部分。盖部件92划分出收纳滑动部件35的收纳空间R。
第1磁铁93是呈圆柱状的部件。第1磁铁93例如由钕形成。第1磁铁93埋设于滑动部件35的中央。第2磁铁94是呈圆柱状的部件。第2磁铁94例如由钕形成。第2磁铁94埋设于中心锥体8的底面的中央。第2磁铁94具有与第1磁铁93的磁极不同的磁极。由此,对第1磁铁93与第2磁铁94之间作用牵拉力(吸引力)。第1磁铁93以及第2磁铁94构成对中心锥体8施力的施力部,以使滑动部件35位于收纳空间R内的中央(规定位置)。
片部件95设置在中心锥体8与滑动部件35之间。片部件95是摩擦系数比中心锥体8小的圆形片状的部件。片部件95铺设在开口部82的底面。
在这样的本实施方式的构成中,在不与FOUP90的凸缘部91接触的无负载时,通过第1磁铁93与第2磁铁94之间的吸引力自动地调心,以将中心锥体8的位置维持在与滑动部件35同轴的中心位置(返回到中心位置)。在该状态下,中心锥体8相对于滑动部件35以及安装有滑动部件35的升降台6在沿着水平方向的第1方向、以及沿着水平方向且与第1方向正交的第2方向上移动自如。即,中心锥体8相对于升降台6在水平方向的所有方向上自如移动(水平自如移动)一定量(收纳空间R的半径与滑动部件35的半径之差)。
接着,例示通过升降台6的一对爪部件6a保持FOUP90的动作。
升降台6下降,中心锥体8与凸缘部91的凹部91a嵌合。当升降台6到达保持位置时,升降台6的下降停止。一对爪部件6a闭合,一对爪部件6a进入凸缘部91的下侧。之后,升降台6上升,进入到凸缘部91的下侧的一对爪部件6a与凸缘部91的下表面抵接,FOUP90被抬起。由此,如图5的(a)所示,FOUP90被保持。在通常时,在水平方向上在各爪部件6a与凸缘部91之间设置有例如1mm左右的间隙。在通常时,如图5的(b)所示,中心锥体8经由片部件95与开口部82的底面抵接,并且位于与滑动部件35同轴的中心位置。
此时,如图6的(a)所示,有时对FOUP90施加某些力,例如凸缘部91在水平方向上偏移爪部件6a与凸缘部91之间的间隙的量。关于这一点,如上所述,本实施方式具有能够在中心锥体8的内部沿着水平方向滑动的构造,即,中心锥体8相对于滑动部件35(升降台6)在水平方向上移动自如。因此,即使在产生了该偏移的情况下,中心锥体8也相对于滑动部件35在水平方向上滑动,并以追随凸缘部91的移动的方式与凸缘部91一体地在水平方向上移动。其结果,能够原状维持中心锥体8向凹部91a的嵌合,能够抑制中心锥体8朝向凹部91a外爬升或者中心锥体8朝向凹部91a内下降。
以上,根据本实施方式的高架输送车1,在FOUP90在水平方向上偏移的情况下,中心锥体8能够与该偏移相应地在水平方向上移动。其结果,能够抑制该偏移转换成中心锥体8向高度方向的移动。因此,通过高度检测部20,能够准确地求出中心锥体8相对于升降台6的相对的高度位置。通过使中心锥体8追随凸缘部91的水平方向的移动,能够防止高度检测部20的误检测。此外,能够在水平方向上减少经由中心锥体8的振动传递。此外,能够抑制凸缘部91的上表面与中心锥体8滑动,能够抑制凸缘部91的上表面的损伤(磨伤)。
在高架输送车1中,中心锥体8是嵌入在FOUP90的凸缘部91的上表面形成的凹部91a中的定位部。在该情况下,能够通过中心锥体8将升降台6相对于FOUP90定位。
高架输送车1具备滑动部件35,该滑动部件35安装于升降台6,能够相对于中心锥体8沿着水平方向滑动。中心锥体8包括收纳滑动部件35的收纳空间R。由此,能够具体地实现中心锥体8相对于升降台6沿着水平方向移动自如的构成。
高架输送车1具备第1磁铁93以及第2磁铁94,作为对中心锥体8施力以使滑动部件35位于收纳空间R内的中央的施力部。由此,例如在中心锥体8不与凸缘部91的上表面接触的无负载时,能够将中心锥体8相对于升降台6的位置维持为一定。此处,能够自动地调心,以维持中心锥体8与滑动部件35同轴的中心位置。此外,由于作为施力部具备第1磁铁93以及第2磁铁94,所以利用第1磁铁93以及第2磁铁94的磁力,能够将中心锥体8相对于升降台6的位置维持为一定。在无负载下的高架输送车1的行驶时,能够抑制异响的产生。
在高架输送车1中,具备堵塞划分收纳空间R的开口部82的开口的一部分的盖部件92。在该情况下,通过盖部件92,能够阻止滑动部件35从收纳空间R脱离。
在高架输送车1中,在中心锥体8与滑动部件35之间设置有摩擦系数比中心锥体8小的片部件95。在该情况下,例如在中心锥体8与凸缘部91的上表面接触的状态下,在该凸缘部91在水平方向上偏移的情况下,通过片部件95,使得滑动部件35与中心锥体8容易滑动。由此,能够抑制凸缘部91的上表面与中心锥体8滑动。能够抑制凸缘部91的上表面的损伤。
在高架输送车1中,中心锥体8相对于升降台6在沿着水平方向的第1方向以及沿着水平方向且与第1方向正交的第2方向移动自如。由此,即使在凸缘部91不仅在沿着水平方向的第1方向而且在第2方向上偏移的情况下,中心锥体8也能够与该偏移相应地在水平方向上移动。
[第2实施方式]
对第2实施方式进行说明。在本实施方式的说明中,对与第1实施方式的不同点进行说明,省略重复的说明。
如图7以及图8所示,第2实施方式的高架输送车100与第1实施方式的不同点在于,作为容器以POD190为对象,代替中心锥体8(参照图2)而具备中心垫108作为容器接触部。中心垫108呈圆柱状的外形,包括平面状的下表面108a。中心垫108与POD190的平面状的上表面191抵接。在中心垫108的下表面108a设置有摩擦系数比中心垫108大的片状的摩擦部件105。中心垫108经由摩擦部件105与POD190的上表面191接触。摩擦部件105例如由聚氨酯橡胶形成。
在本实施方式中,在通过一对爪部件6a保持POD190的情况下,在升降台6下降而中心垫108与POD190的上表面191抵接之后,一对爪部件6a闭合,一对爪部件6a进入POD190的侧面的凸缘部192的下侧。升降台6上升,通过一对爪部件6a经由凸缘部192抬起POD190。
此处,如图7所示,例如在一对爪部件6a闭合时,爪部件6a有时与POD190接触。在该情况下,在一般的高架输送车的构成中,有可能一对爪部件6a未完全闭合而发生错误,或者中心垫108相对于上表面191摩擦。关于这一点,在本实施方式中,具有能够在中心垫108的内部沿着水平方向滑动的构造,即,中心垫108相对于滑动部件35(升降台6)在水平方向上移动自如。因此,如图8所示,在一对爪部件6a闭合时爪部件6a与POD190接触的情况下,随着POD190被爪部件6a在水平方向上压入而偏移,中心垫108相对于滑动部件35在水平方向上滑动,与该POD190一体地在水平方向上移动,以追随POD190的移动。其结果,能够原状维持中心垫108与POD190的上表面191的抵接而不使两者滑动。
以上,在本实施方式的高架输送车100中,能够准确地求出中心垫108相对于升降台6的相对的高度位置。此外,能够抑制POD190的上表面191与中心垫108滑动,能够抑制POD190的上表面191的损伤(摩擦)。
在高架输送车100中,中心垫108经由摩擦系数比中心垫108大的摩擦部件105与POD190的上表面191接触。由此,在中心垫108与POD190的上表面191接触的状态下,在POD190在水平方向上偏移的情况下,能够通过摩擦部件105抑制POD190的上表面191与中心垫108滑动,能够抑制POD190的上表面191的损伤。
以上,对实施方式进行了说明,但本发明的一个方式并不限定于上述实施方式。
在上述实施方式中,只要能够检测中心锥体8相对于升降台6的相对的上升动作,高度检测部20便不限定于上述构成。在上述实施方式中,只要能够与容器的上表面接触,容器接触部便并不限定于中心锥体8以及中心垫108,可以应用FOUP90以及POD190以外的容器。
上述实施方式具备第1磁铁93以及第2磁铁94作为对容器接触部施力的施力部,但施力部没有特别限定。只要能够对容器接触部施力(施加力),便可以采用各种构成作为施力部。例如也可以具备弹簧或者橡胶作为施力部,利用其弹力对容器接触部施力。
上述实施方式以及变形例中的各构成并不限定于上述材料以及形状,能够应用各种材料以及形状。上述实施方式或者变形例中的各构成能够任意应用于其他实施方式或者变形例中的各构成。上述实施方式或者变形例中的各构成的一部分在不脱离本发明的一个方式的主旨的范围内能够适当省略。
符号的说明
1、100:高架输送车;6:升降台;8:中心锥体(容器接触部);20:高度检测部;35:滑动部件;82:开口部;90:FOUP(容器);91a:凹部;92:盖部件;93:第1磁铁(施力部);94:第2磁铁(施力部);95:片部件;105:摩擦部件;108:中心垫(容器接触部);190:POD(容器);191:上表面;R:收纳空间。