一种一体化智慧列车运行系统整体架构
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及轨道交通技术领域,具体为一种一体化智慧列车运行系统整体架构。
背景技术
传统车辆均采用分布式结构,将各子系统连接到TCMS系统上,不仅造成车辆总线有着大量的数据通信,使得车辆总线的占用率居高不下,同时使得各个子系统的设备上加载着大量的物理接口和软件中的逻辑关系。随着全自动无人驾驶技术的广泛应用,车辆对各系统功能要求越来越高,同时设备安装空间却越来越少。
传统的信号控车功能都是在ATP防护下,由ATO以推荐速度为控制目标,以实际列车速度为控制参数实现的。由于信号与车辆交互信息较少,其控制过程难以实时获取列车牵引/制动能力与工作状态,且列车是大惯性系统,导致形成闭环控制的周期长,控制反应滞后,列车区间运行及进站停车过程容易出现过牵引(或欠牵引)、过制动(或欠制动)以及定点停车精度低的问题。
在工程实施过程中,车辆与信号的配合调试是现场动车调试的重要内容。由于双方互不了解、交互信息少,导致ATO控车、停车精度、电空转换等功能的现场调试耗费了大量人力物力,直接影响着线路开通的时间节点和质量。
因此,研究车辆与信号的融合,有利于改进信号系统控车策略、缩短系统调试的时间,能够提升整车的可靠性和可用性,降本增效。
发明内容
本发明的目的在于提供一种一体化智慧列车运行系统整体架构,实现ATO与TCMS深度融合。
为了解决上述技术问题,本发明提供如下技术方案:一种一体化智慧列车运行系统整体架构,包括:
车载设备,所述车载设备包括左脑子系统、右脑子系统;
ATS子系统,所述ATS子系统用于与OC子系统、车载设备配合完成对列车运行的实时监控;
OC子系统,所述OC子系统用于列车的资源管理,接收右脑子系统和ATS子系统的命令为列车提供资源;
所述左脑子系统融合平台,所述融合平台用于集成、融合ATO与TCMS功能,实现列车运行自动控制、车辆控制及监督功能;
所述右脑子系统用于列车自主测速测距、管理行车资源,并与OC子系统进行交互。
进一步的,所述车载设备还包括北斗子系统,所述北斗子系统用于实现对列车的测速定位,并将获取的位置和速度信息传输至右脑子系统。
进一步的,所述车载设备还包括二次雷达子系统,所述右脑子系统通过二次雷达子系统与地面进行通信,维持列车全自动运行;
所述二次雷达子系统包含轨旁设备、车载二次雷达单元。
进一步的,还包括信标阅读器,所述信标阅读器设置在列车头尾端,用于读取轨旁信标信息,且右脑子系统获取信标阅读器读取的轨旁信标信息。
进一步的,还包括视觉惯导设备,所述视觉惯导设备设置在列车头尾端,所述视觉惯导设备用于将实时采集列车速度数据、列车基于基准点的运行里程信息并传输至右脑子系统。
进一步的,还包括速度传感器,所述速度传感器用于实时采集列车速度并传输至右脑子系统。
进一步的,所述左脑子系统采用双机热备冗余架构。
进一步的,所述右脑子系统采用二乘二取二冗余架构。
进一步的,所述OC子系统包括:
OC主机,所述OC主机采用二乘二取二冗余架构;
IO控制单元,所述IO控制单元采用二乘二取二冗余架构。
与现有技术相比,本发明所达到的有益效果是:
1、通过实现ATO与TCMS深度融合,实现了让系统更轻量化、集成化、智能化;丰富了车辆和信号的交互信息,优化了车载网络布局架构和各子系统间接口,降低了系统复杂度,提高了列车性能和可靠性。
2、增加二次雷达子系统、北斗子系统、视觉惯导设备等自主感知设备,可便于减少轨旁设备,车载设备高度集成化;右脑子系统获取速度传感器、信标阅读器、北斗子系统、二次雷达子系统、视觉惯导设备采集的测速及定位信息,实现自主感知列车的位置;在实际项目中,可根据项目实际需求进行测速定位功能模块的灵活配置。
3、本系统取消了计轴、信号机设备,利用二次雷达子系统实现了列车降级或故障条件下的后备管理。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
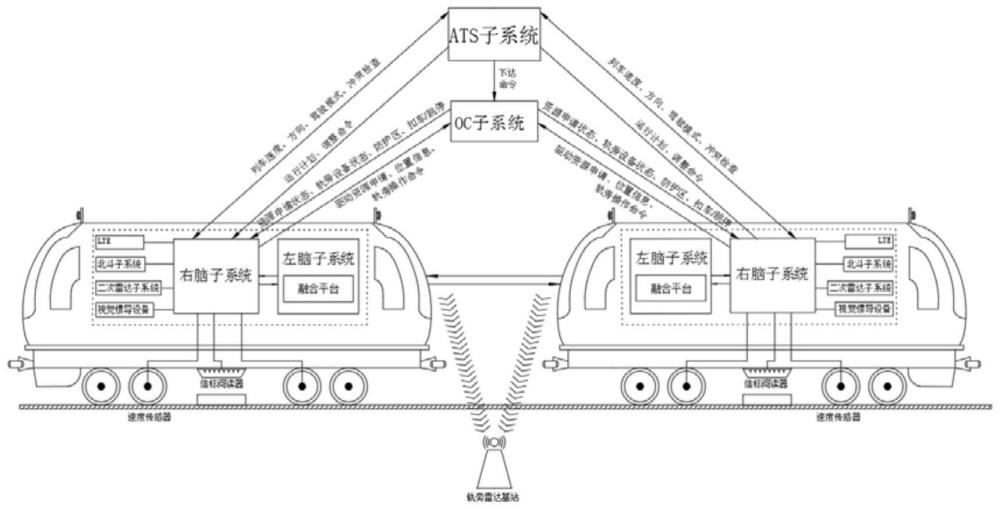
图1是本发明系统构架图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
首先对本具体实施方式中涉及的术语解释如下:
ATS:列车自动监控系统
ATO:列车自动运行系统
ATP:列车自动防护
OC:目标控制器
TCMS:列车控制和管理系统
LTE:长期演进
RTK:载波相位差分技术
本发明提供技术方案:一种一体化智慧列车运行系统整体架构,包括车载设备、OC子系统、ATS子系统、速度传感器、视觉惯导设备、信标阅读器;所述车载设备由包括左脑子系统、右脑子系统、北斗子系统及二次雷达子系统组成;ATS子系统用于与OC子系统、车载设备配合完成对列车运行的实时监控;OC子系统用于列车的资源管理,接收右脑子系统和ATS的命令为列车提供资源;左脑子系统用于实现列车运行自动控制和车辆控制及监督功能;右脑子系统则用于列车自主测速测距、管理行车资源,并与OC子系统交互。
所述左脑子系统用于集成ATO与TCMS功能,实现ATO和TCMS的融合;所述左脑子系统采用双机热备冗余架构,故障时自动切换;左脑子系统包括融合平台,融合平台包含主控板和协控板两个控制板卡,主控板实现VCU的SIL2功能,也实现ATO的功能;协控板主要承载VCU分离出的SIL0功能;融合平台采用两个通信板,其中一个通信板用于实现本端列车的右脑子系统和对端列车的右脑子系统的通信功能,余下一个通信板则实现TCMS网络功能;融合平台还包括数字量输出板、数字量输入板,数字量输出板车辆提供干接点输出端,一个数字量输出板配置一个接口板;数字量输入板采集车辆中的开关量信号,作为融合时的输入数据,两个数字量输入板配置一个接口板;左脑子系统用于实现算法功能、软件代码功能、车门控制功能、方向控制等的融合。
左脑子系统用于算法功能融合;ATO和TCMS融合前存在车辆控制边界、软硬件信息交互边界,导致ATO对列车控制逻辑链路冗长,主要通过速度反馈调节,控制算法单一,调试时间长且调试难度较大,ATO精确控车效果难以改善;将ATO和TCMS融合,左脑子系统实时获取牵引/制动系统状态,实时载荷,实时空转/打滑状态,以及牵引系统实时牵引/电制动力大小和空气制动系统的实时制动力大小,提前控制ATO的输出值大小,减小了在以往项目中只能以速度值为参考导致的控制滞后,使ATO的控制更精准,避免出现过牵引、过制动情况的发生。
左脑子系统用于软件代码功能融合;由于TCMS及ATO属于不同系统,硬件、软件架构完全不同;将ATO和TCMS融合,相关控制功能的软件代码均统一采用同一平台编写,可显著提高相关控制编程效率、项目ATO及TCMS控车功能的调试效率,便于相关控制功能数据的下载和综合分析,快速查找相关控制功能的故障原因,最终提高系统的可靠性和稳定性。
左脑子系统用于车门控制功能的融合;融合前,ATO控制车门和列车控制车门边界明显,逻辑及电路复杂;左脑子系统设置有融合平台,融合平台统一采集开门、关门指令;当融合平台正常,融合平台根据门模式开关、信号模式、按钮采集信息状态决定是否发送开关门指令;当融合平台处于故障状态时,直接通过硬线回路开关门,简化了车门控制逻辑及电路。
左脑子系统用于方向控制的融合;融合前,ATO系统单独输出牵引、制动指令;融合后,融合平台控制列车以推荐速度进行运行,同时考虑列车牵引授权、列车限速、融合平台通过数据流向车辆牵引、制动系统输出控制命令,比融合前输出的牵引、制动控制指令更安全可靠。
左脑子系统用于方向控制的融合牵引、制动指令控制融合;融合前,ATO系统单独输出牵引、制动指令;融合后,融合平台控制列车以推荐速度进行运行,同时考虑列车牵引授权、列车限速、融合平台通过数据流向车辆牵引、制动系统输出控制命令,比融合前输出的牵引、制动控制指令更安全可靠。
融合平台同时包含有AOM主控板,用于实现列车自动唤醒自动休眠;AOM主控板通过车辆网络、LTE实现与右脑子系统和ATS子系统的通信。
所述右脑子系统采用二乘二取二冗余架构;右脑子系统与左脑子系统通过以太网进行通信,右脑子系统向左脑子系统发送速度、方向、移动授权终点、扣车信息、下一站运行等级等信息;左脑子系统则向右脑子系统发送推荐速度、跳停状态、牵引/制动状态、发车剩余时间、车辆状态等信息。
同时,相邻列车的右脑子系统之间可交互信息,即各右脑子系统可接收其相邻右脑子系统发送的位置、速度以及运行状态,并向相邻列车的右脑子系统发送本车位置、速度以及运行状态信息;各右脑子系统接收对端列车的右脑子系统,接收对端列车的右脑子系统发送的位置、速度以及运行状态信息,向对端列车的右脑子系统发送本车位置、速度、折返换端命令以及运行状态信息。
车载设备还包括HMI,右脑子系统通过左脑子系统向HMI发送列车速度、方向、紧急制动状态、车门/站台门状态、目标速度/距离等信息,HMI向右脑子系统发送日检等命令信息。
ATS子系统,所述ATS子系统与OC子系统、车载设备配合完成对列车运行的实时监控;所述ATS子系统与列车右脑子系统通过车地无线网络进行通信;所述右脑子系统向ATS子系统发送列车速度、方向、驾驶模式以及冲突检查;ATS子系统则向右脑子系统发送运行计划,列车调整命令。
速度传感器安装于列车轴端、电机等部位,所述速度传感器用于实时采集列车速度并传输至右脑子系统,即右脑子系统通过速度传感器来获取列车当前速度。
所述视觉惯导设备设置在列车头尾端,列车右脑子系统利用视觉惯导设备实现列车的位置速度探测;所述视觉惯导设备用于实时采集列车速度数据、列车基于基准点的运行里程信息并传输给右脑子系统,右脑子系统即可获取当前列车的速度、位置信息;速度传感器或视觉惯导设备正常采集获取速度信息时,右脑子系统获取速度传感器或视觉惯导设备所采集信息完成实时获取列车速度。
信标阅读器,所述信标阅读器设置在列车头尾端,用于读取轨旁信标信息;信标阅读器与列车右脑子系统通过串口进行通信,右脑子系统获取信标阅读器读取的轨旁信标信息;轨旁信标写有当前位置的线路、里程位置,当列车经过轨旁信标,由信标阅读器获得轨旁信标的有效报文,右脑子系统获取该有效报文,并以该位置信息更新列车的位置信息,进行关键位置的校正。
北斗子系统用于实现对列车的测速定位,右脑子系统获取北斗子系统采集的列车的位置和速度信息;具体地,北斗子系统包括北斗车载单元,列车头尾端各设置一套北斗车载单元,北斗车载单元包括车载天线、馈线及终端;此外,北斗子系统还包括RTK基站设备、卫星设备,列车的测速定位基于卫星设备的导航,通过车载天线接收卫星信号,实现列车自身的测速定位。
二次雷达子系统包含轨旁设备、车载二次雷达单元;车载二次雷达单元包括车载雷达模块和逻辑运算单元;二次雷达子系统测速定位功能主要由车载二次雷达单元、轨旁雷达基站测量计算完成,各车载二次雷达单元之间采用TOF飞行时间算法,实现点对点的测距功能,基于轨旁雷达基站的物理坐标和线路电子地图,精确计算出列车在轨道上的实际位置列车在运行过程;采用TOF飞行时间算法,可计算出车载二次雷达单元与轨旁雷达基站之间的相对距离,结合右脑子系统获得的列车速度数据、列车基于基准点的运行里程信息等,计算出列车的实时位置及速度;同时轨旁雷达基站通过TOF飞行时间算法,实现实时测量出与列车的相对距离。
二次雷达子系统还用于实现列车降级或故障条件下的后备管理;二次雷达子系统还包括中心雷达服务器和车载布置雷达感知模块,中心雷达服务器采用二乘二取二安全平台,并与OC子系统和ATS子系统进行接口通信,共同完成列车故障降级下的安全运行。
轨旁设备包括轨旁雷达基站、雷达天线、通信接口转换模块;列车运行线路单侧每隔一定距离布置一套雷达基站和雷达天线,实现全线雷达波的全覆盖;通过设置通信接口转换模块,接入DCS有线网络与中央雷达服务器通信。
当LTE故障后,可通过二次雷达子系统实现连续的车地无线通信,右脑子系统通过二次雷达子系统与地面进行通信,用于维持列车全自动运行;二次雷达系统与地面设备交互信息,实现对降级列车的实时监督和控制,能够为降级列车提供连续的移动授权信息,保障降级时的安全防护和运营效率。
车载二次雷达单元与轨旁雷达基站测量计算的列车位置均汇报给中心雷达服务器,中心雷达服务器整合统一各个轨旁雷达基站计算的位置后,和车载二次雷达单元的位置共同发送给OC子系统,OC子系统优先使用通过车载二次雷达单元计算的列车位置作为列车安全位置;而当列车右脑子系统设备故障或完全失去通信时,右脑子系统无法根据车载二次雷达单元计算列车位置,OC子系统使用中心雷达服务器整合的列车位置作为列车安全位置,并根据此位置为列车设置安全防护区,取消了传统系统中的计轴设备,简化了轨旁设备布置。
OC子系统与列车右脑子系统通过车地无线网络进行通信,右脑子系统向OC子系统发送驱动资源申请、轨旁设备操作命令等信息;OC子系统则向列车右脑发送资源申请状态、轨旁设备状态、防护区、扣车/跳停等信息。
所述OC子系统包括OC主机、IO控制单元,所述IO控制单元用于采集轨旁设备的状态、驱动轨旁设备动作;OC主机采用二取二冗余型安全计算机平台,两套共4个CPU构成二乘二取二系统;OC主机接收IO控制单元传来的轨旁信号设备状态、接收右脑子系统传输的资源申请、轨旁设备操作命令;OC主机向IO控制单元传输轨旁信号设备的动作命令,并向右脑子系传送资源状态反馈。
所述OC子系统还包括电源模块、通信接口模块,电源模块为IO控制单元提供稳定可靠的工作电源,并具有防雷防浪涌功能;通信接口模块为OC子系统提供对外通信接口,包括ATS子系统、左脑子系统、右脑子系统、相邻OC子系统等。
右脑子系统获取速度传感器、信标阅读器、北斗子系统、二次雷达子系统、视觉惯导设备等采集的测速、定位信息,可进行列车速度位置信息的融合,从而自主感知列车的位置;且在在实际项目中,可根据项目实际需求进行测速定位功能模块的灵活配置;实现列车测速/定位的连续高精准列车定位、感知设备灵活组合、不同运营场景的算法自适应调整、部分感知设备故障条件下定位系统的冗余和安全,提升测速/定位整体的可用性、可靠性、安全性,解决传统单一传感器存在的制约因素。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。