一种货运索道运行小车及系统
文献发布时间:2024-01-17 01:20:32
技术领域
本发明涉及输电线路施工的技术领域,具体涉及一种货运索道运行小车及系统。
背景技术
特高压输电线路工程中塔材、导线、地材及施工装备等各类物料运输量大多数通过索道运输,但是在索道运输中,由于人工搬运物料工作量大,同时还由于送料机械化和自动化程度低,造成索道运输效率低的问题。
发明内容
为了解决在索道运输中,由于人工搬运物料工作量大,同时还由于送料机械化和自动化程度低,造成索道运输效率低的问题,本发明提一种货运索道运行小车,包括运行小车主体(1)、连接主体、夹爪机构(9)、第一动力伸缩机构和第二动力伸缩机构;
所述连接主体的上端通过所述第一动力伸缩机构与所述运行小车主体(1)连接,下端通过所述第二动力伸缩机构与所述夹爪机构(9)连接;
所述夹爪机构(9)在所述第二动力伸缩机构的作用下具有张开的第一状态和闭合的第二状态,所述夹爪机构(9)基于所述第一状态和第二状态实现对物料(18)的夹持。
优选的,所述第一动力伸缩机构包括提升液压油缸(8);
所述提升液压油缸(8)上端与所述运行小车主体(1)的底部固定,下端与所述连接主体的顶部固定;
所述第二动力伸缩机构包括夹爪液压油缸(13);
所述夹爪液压油缸(13)的上端与所述连接主体的底部固定,下端与所述夹爪机构的顶部连接。
优选的,所述连接主体包括呈柱状结构的提升主体(7);
所述第一动力伸缩机构的上端与所述运行小车主体(1)固定,下端与所述提升主体(7)的上端固定。
优选的,所述连接主体还包括底部敞开的壳体结构的夹持架体(14);
所述夹爪机构(9)设置于所述夹持架体(14)内;
所述第二动力伸缩机构的上端穿过所述夹持架体(14)顶壁与所述提升主体(7)的下端固定,下端与所述夹爪机构(9)铰接。
优选的,所述夹爪机构(9)至少为两组,沿所述第二动力伸缩机构周侧均布;
所述夹爪机构(9)的一端与所述第二动力伸缩机构的下端铰接,另一端为自由端;
在所述夹爪机构(9)的一端和另一端之间具有转动点,每组夹爪机构(9)均通过所述转动点与连接主体铰接;
所述每组夹爪机构(9)在所述第二动力伸缩机构的作用下基于转动点转动,使所述至少两组夹爪机构(9)的自由端相互远离实现张开的第一状态;或相互靠近实现闭合的第二状态。
优选的,所述每组夹爪机构(9)包括夹爪本体(10)和夹爪连杆(11);
所述夹爪本体(10)和所述夹爪连杆(11)均呈杆状结构,通过销轴铰接;
所述夹爪连杆(11)远离所述夹爪本体(10)的端部为所述一端。
优选的,所述夹爪机构(9)还包括铰接结构;
所述铰接结构安装于所述连接主体上;
所述转动点位于所述夹爪本体(10)上,通过所述铰接结构与所述连接主体铰接。
优选的,所述夹爪本体(10)背离所述夹爪连杆(11)的端部为自由端,设置有挂钩。
优选的,所述夹爪机构(9)还包括夹爪主体(12);
所述夹爪主体(12)沿垂直于所述第二动力伸缩机构的伸缩方向布置,并固定于所述第二动力伸缩机构的下端;
所述一端与所述夹爪主体(12)铰接。
优选的,还包括用于检测其与所述物料(18)的距离的位置检测装置;
所述位置检测装置安装于所述连接主体上。
优选的,所述位置检测装置包括双目定位装置(16);
所述双目定位装置(16)的视角方向朝下。
优选的,还包括控制装置(15);
所述控制装置(15)固定于所述连接主体上,并与所述第一动力伸缩机构、所述第二动力伸缩机构和所述位置检测装置连接;
所述控制装置(15)用于:根据所述位置检测装置检测到其与所述物料(18)的距离,分别控制所述第一动力伸缩机构和所述第二动力伸缩机构进行升降运动,进而带动所述夹爪机构(9)靠近所述物料(18)并实现夹爪机构(9)夹持所述物料(18)的操作。
优选的,所述运行小车还包括报警装置(17);
所述第一动力伸缩机构上设置有重量传感器;
所述第一动力伸缩机构通过所述重量传感器发送重量信号与所述控制装置(15)连接;
所述控制装置(15)基于所述重量信号发送控制信号与所述报警装置(17)连接;
当输送所述物料(18)时,所述第一动力伸缩机构基于所述物料(18)的重量输出重量信号至所述控制装置(15),所述控制装置(15)基于所述重量信号发送控制信号至所述报警装置(17),所述报警装置(17)基于所述控制信号进行超载报警。
基于同一发明构思,本发明还提供了一种货运索道运行系统,包括承载索(19)、牵引索(20)和至少一个货运索道运行小车;
所述承载索(19)和所述牵引索(20)平行设置于物料(18)的堆放点和所述物料(18)的装卸点之间;
所述运行小车的运行小车主体(1)悬挂于所述承载索(19)上;
所述运行小车的运行小车主体(1)的抱索器(5)夹持所述牵引索(20)。
优选的,所述运行小车设置为多个;
所述运行小车的控制装置(15)向其他所述控制装置(15)发送自身的状态信号,并接收其他所述控制装置(15)的状态信号;
当所有所述控制装置(15)发送的状态信号均满足施工需求时,多个控制装置(15)分别控制对应所述运行小车同步提升所述物料(18)。
与现有技术相比,本发明的有益效果为:
1.本发明提供了一种货运索道运行小车,包括运行小车主体、连接主体、夹爪机构、第一动力伸缩机构和第二动力伸缩机构;所述连接主体的上端通过所述第一动力伸缩机构与所述运行小车主体连接,下端通过所述第二动力伸缩机构与所述夹爪机构连接;所述夹爪机构在所述第二动力伸缩机构的作用下具有张开的第一状态和闭合的第二状态,所述夹爪机构基于所述第一状态和第二状态实现对物料的夹持;本发明提供的运行小车通过位于运行小车主体与连接主体之间的动力伸缩机构的伸缩,实现运行小车整体高度的改变,同时位于夹爪机构与连接主体之间的动力伸缩机构控制夹爪机构的状态,从而控制物料的夹持与卸载,减小人工装卸、提升物料工作量,提升送料机械化和自动化程度,进而提升索道的运输效率。
2.本发明提供的一种货运索道运行系统,针对货运索道运输物料,运行小车主体悬挂于承载索上,运行小车主体的抱索器夹持牵引索,位置检测装置检测到其与物料之间的距离后,发送距离信号至控制装置,控制装置基于距离信号发送控制信号控制两个动力伸缩机构分别进行升降运动,从而实现夹爪机构对物料的夹持和对夹爪机构的提升,进而实现对重量大、长度大的塔材等大型物料的自动提升,减小人工装卸、提升物料工作量,提升索道施工上下料机械化、自动化程度。
附图说明
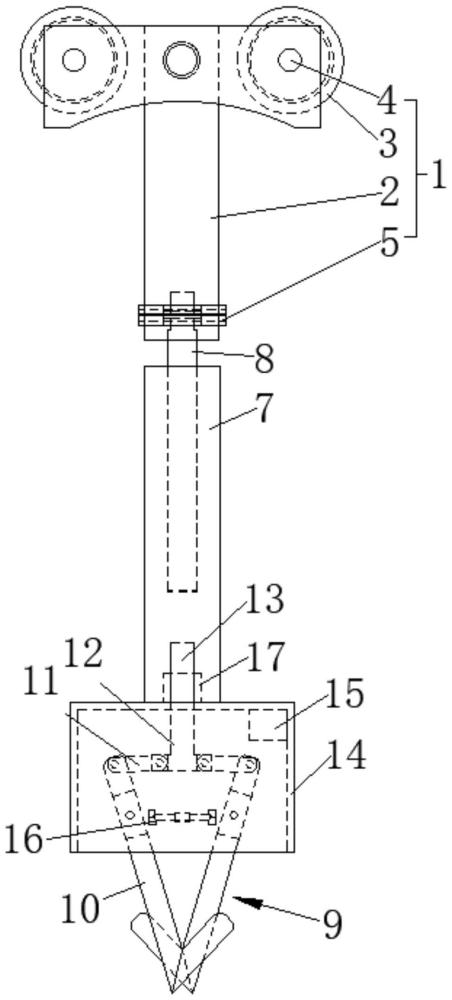
图1为本发明的货运索道运行小车的第一视角结构示意图;
图2为本发明的货运索道运行小车的第二视角结构示意图;
图3为本发明的货运索道运行小车的夹爪本体打开的结构示意图;
图4为本发明的货运索道运行小车夹持物料的结构示意图;
图5为本发明的货运索道运行小车输送物料的结构示意图。
其中,1、运行小车主体;2、车架;3、行走轮;4、车轴;5、抱索器;7、提升主体;8、提升液压油缸;9、夹爪机构;10、夹爪本体;11、夹爪连杆;12、夹爪主体;13、夹爪液压油缸;14、夹持架体;15、控制装置;16、双目定位装置;17、报警装置;18、物料;19、承载索;20、牵引索。
具体实施方式
为了更好地理解本发明,下面结合说明书附图和实例对本发明的内容做进一步的说明。
本发明提供的一种货运索道运行小车通过位于运行小车主体与连接主体之间的动力伸缩机构的伸缩,实现运行小车整体高度的改变,同时位于夹爪机构与连接主体之间的所述动力伸缩机构控制夹爪机构的状态,从而控制物料的夹持与卸载,减小人工装卸、提升物料工作量,提升送料机械化和自动化程度,进而提升索道的运输效率。
实施例1:
一种货运索道运行小车,如图1和图2所示,包括运行小车主体1、连接主体、夹爪机构9、第一动力伸缩机构和第二动力伸缩机构;连接主体的上端通过第一动力伸缩机构与运行小车主体1连接,下端通过第二动力伸缩机构与夹爪机构9连接;夹爪机构9在第二动力伸缩机构的作用下具有张开的第一状态和闭合的第二状态,夹爪机构9基于第一状态和第二状态实现对物料18的夹持。
第一动力伸缩机构包括提升液压油缸8;提升液压油缸8上端与运行小车主体1的底部固定,下端与连接主体的顶部固定;第二动力伸缩机构包括夹爪液压油缸13;夹爪液压油缸13的上端与连接主体的底部固定,下端与夹爪机构的顶部连接。
连接主体包括呈柱状结构的提升主体7;第一动力伸缩机构的上端与运行小车主体1固定,下端与提升主体7的上端固定。两端均设有开口;提升液压油缸8的下端固定于提升主体7上端开口的内底壁;
连接主体还包括底部敞开的壳体结构的夹持架体14;夹爪机构9设置于夹持架体14内;第二动力伸缩机构的上端穿过夹持架体14顶壁与提升主体7的下端固定,下端与夹爪机构9铰接。夹持架体14顶部具有孔;夹爪机构设置于夹持架体14的壳体结构内;夹爪液压油缸13依次穿过夹持架体14顶部的孔和提升主体7的下端开口后固定于提升主体7的内顶壁。
提升液压油缸8置于提升主体7和运行小车主体1之间,通过提升液压油缸8的收缩和伸长实现物料18的提升和下降。
夹爪机构9至少为两组,沿第二动力伸缩机构周侧均布;夹爪机构9的一端与第二动力伸缩机构的下端铰接,另一端为自由端;在夹爪机构9的一端和另一端之间具有转动点,每组夹爪机构9均通过转动点与连接主体铰接;每组夹爪机构9在第二动力伸缩机构的作用下基于转动点转动,使至少两组夹爪机构9的自由端相互远离实现张开的第一状态;或相互靠近实现闭合的第二状态。
每组夹爪机构9包括夹爪本体10和夹爪连杆11;夹爪本体10和夹爪连杆11均呈杆状结构,通过销轴铰接;夹爪连杆11远离夹爪本体10的端部为夹爪机构9的一端。
本实施例中每组夹爪机构9包括一个夹爪本体10和一个夹爪连杆11;夹爪本体10和夹爪连杆11均呈杆状结构,通过销轴铰接;夹爪连杆11远离夹爪本体10的端部为夹爪机构9的一端,与第二动力伸缩机构的下端铰接。夹爪本体10背离夹爪连杆11的端部为自由端,设置有挂钩。
夹爪机构9还包括铰接结构;铰接结构安装于连接主体上;转动点位于夹爪本体10上,通过铰接结构与连接主体铰接。本实施例中,转动点位于夹爪本体10的中部位置,铰接结构为焊接于夹持架体14的内壁上的销轴,该销轴穿设于夹爪本体10上。
夹爪机构9还包括夹爪主体12;夹爪主体12沿垂直于第二动力伸缩机构的伸缩方向布置,并固定于第二动力伸缩机构的下端;夹爪连杆11远离夹爪本体10的端部与夹爪主体12铰接。
多个夹爪连杆11以动力伸缩机构的轴线为中心线均布;多个夹爪本体10基于对应夹爪连杆11的运动而沿铰接结构转动,使多个夹爪本体10上的挂钩相互远离,处于张开的第一状态,或相互靠近,处于闭合的第二状态。
如图3和图4所示,本实施例中,夹爪机构9设置为两组,夹爪本体10和夹爪连杆11均设置为两个,并依次通过销轴铰接;夹爪主体12为杆状结构,夹爪连杆11分别铰接于夹爪主体12的两端。夹爪机构9将夹爪主体12的直线运动通过夹爪连杆11转换为夹爪本体10的旋转运动;当夹爪连杆11的位置由平行于夹爪液压油缸13的伸缩方向转动至垂直于夹爪液压油缸13的伸缩方向时,夹爪本体10由松开物料18转动至夹持物料18。
夹爪主体12为杆状结构,且夹爪主体12沿垂直于夹爪液压油缸13伸缩方向布置;夹爪主体12的中部固定于夹爪液压油缸13的端部;夹爪主体12的两端分别通过两个夹爪连杆11与两个夹爪本体10连接;两个夹爪本体10绕铰接结构做张合运动。夹爪本体10、夹爪连杆11、夹爪主体12间通过铰接方式连接,夹爪液压油缸13与夹爪主体12连接,通过夹爪液压油缸13带动夹爪本体10、夹爪连杆11、夹爪主体12运动,实现夹爪本体10的张开和闭合功能。
挂钩设置于多个夹爪本体10自由端相近的侧面上,且挂钩与夹爪本体一体设置;物料18挂设于挂钩内。
本实施例提供的运行小车还包括用于检测其与物料18的距离的位置检测装置;位置检测装置安装于夹持架体14上。位置检测装置包括双目定位装置16;双目定位装置16通过螺栓安装于夹持架体14的内壁;双目定位装置16的视角方向朝向下方,即朝向挂钩方向。双目定位装置16置于夹持架体14内,通过双目成像技术获取物料18三维信息并进行测距,实现对物料18的定位和装置高度定位的功能。
运行小车还包括控制装置15;控制装置15固定于连接主体上,并与第一动力伸缩机构、第二动力伸缩机构和位置检测装置连接;控制装置15用于:根据位置检测装置检测到其与物料18的距离,分别控制第一动力伸缩机构和第二动力伸缩机构进行升降运动,进而带动夹爪机构9靠近物料18并实现夹爪机构9夹持物料18的操作。
运行小车还包括报警装置17;提升液压油缸8上设置有重量传感器;提升液压油缸8通过重量传感器发送重量信号与控制装置15连接;控制装置15基于重量信号发送控制信号与报警装置17连接;当输送物料18时,提升液压油缸8基于物料18的重量输出重量信号至控制装置15,控制装置15基于重量信号发送控制信号至报警装置17,报警装置17基于控制信号进行超载报警,实现超载报警功能。
控制装置15安装于夹持架体14的内腔顶部端角处,用于信号接收处理和传递,通过接收双目定位装置16的信号控制提升液压油缸8,完成提升主体7的升降操作,传递信号至夹爪液压油缸13,通过连杆机构完成夹爪的张开和闭合操作,传递信号至报警装置17完成报警。
运行小车主体1包括行走轮3;行走轮3悬挂于索道承载索上。运行小车主体1包括车架2、行走轮3、车轴4和抱索器5,车架2为一个沿竖直方向放置的杆状结构,行走轮3和抱索器5分别安装于车架2的两端,且行走轮3位于车架2的上端,抱索器5位于车架2的下端;车架2与行走轮3通过车轴4铰接连接,货运索道运行时行走轮3与承载索19滚动接触,抱索器5夹紧牵引索20随牵引索20移动,完成运行小车运载物料18运动;提升液压油缸8与抱索器5通过销轴铰接方式连接。
实施例2:
基于同一种发明构思,本发明还提供了一种货运索道运行系统,如图5所示,包括:承载索19、牵引索20和至少一个货运索道运行小车;承载索19和牵引索20平行设置于物料18的堆放点和物料18的装卸点之间;运行小车的运行小车主体1悬挂于承载索19上;运行小车的运行小车主体1的抱索器5夹持牵引索20。运行小车的具体个数不做限制,具体个数根据物料18的重量和长度等实际参数进行确定。
运行小车设置为多个;运行小车的控制装置15向其他控制装置15发送自身的状态信号,并接收其他控制装置15的状态信号;当所有控制装置15发送的状态信号均满足施工需求时,多个控制装置15分别控制对应运行小车同步提升物料18。
其具体实施方案如下:
在物料18的堆放点将货运索道运行小车的运行小车主体1悬挂于承载索19和牵引索20上,运行小车主体1的行走轮3置于承载索19上与承载索19滚动接触,运行小车主体1的抱索器5夹紧牵引索20随牵引索20移动,将运行小车置于所需提升的位于堆放点的物料18上方。通过双目定位装置16对物料18进行距离测量,并产生距离信号。
货运索道运行小车的控制装置15获取距离信号,并基于距离信号生成控制信号,并基于控制信号分别控制两个动力伸缩机构进行升降运动:
当夹取物料18时:动力伸缩机构的提升液压油缸8获取控制信号,并基于控制信号伸长,带动运行小车的连接主体下降,从而带动夹爪机构9靠近堆放点的物料18;夹爪液压油缸13基于控制信号收缩,带动夹爪机构9的夹爪主体12沿竖直方向向上移动,从而通过夹爪机构9的夹爪连杆11推动夹爪机构9的夹爪本体10沿铰接结构转动,进而使两个夹爪本体10夹持物料18;提升液压油缸8获取控制信号,并基于控制信号缩短,带动运行小车的连接主体上升,从而提升堆放点的物料18,直至满足物料18的运输需求。
在提升液压油缸8通过其上的重量传感器获取提升的物料18的重量,并向控制装置15发送重量信号;控制装置15基于预设额定运载量与重量信号传递的重量参数进行比较;若重量信号的重量参数高于额定运载量,则控制装置15发送报警信号至运行小车的报警装置17,报警装置17报警;否则,报警装置17不报警。
当运输物料18时:运行小车的运行小车主体1沿承载索19和牵引索20自堆放点移动到装卸点。
当放下物料18时:提升液压油缸8获取控制信号,并基于控制信号伸长,带动运行小车的连接主体下降,从而降下物料18,直至物料18放置于装卸点的地面上;夹爪液压油缸13获取控制信号,并基于控制信号伸长,带动夹爪机构9的夹爪主体12沿竖直方向向下移动,从而通过夹爪机构9的夹爪连杆11拉动夹爪机构9的夹爪本体10沿铰接结构转动,进而使两个夹爪本体10从而松开物料18。
若运行小车为多个,则这些运行小车的控制装置15分别向其他运行小车的控制装置15发送自身的状态信号,并接收其他控制装置15发送的状态信号;当所有控制装置15发送的状态信号均满足施工需求时,这些控制装置15分别控制各自对应的运行小车同步进行运动。
实施例3:
基于同一发明构思,本发明还提供了一种货运索道运行系统的实施方法,具体如下:
(1)在物料18的堆放点将运行小车主体1与承载索19和牵引索20连接,运行小车主体1的行走轮3置于承载索19上与承载索19滚动接触,运行小车主体1的抱索器5夹紧牵引索20随牵引索20移动,将货运索道运行小车置于所需提升物料18上方。
(2)通过双目定位装置16对物料18进行距离测量,传递信息至控制装置15,控制提升液压油缸8完成下降操作。
(3)当提升主体7移动至预定高度时,通过控制夹爪液压油缸13的顶升操作,带动夹持架体14内的夹爪主体12、夹爪连杆11运动实现夹爪的张开和闭合,完成物料18夹持操作。
(4)物料18夹持后通过控制提升液压油缸8的提升操作,实现物料18提升,当物料18重量超过额定运载量时由报警装置17发出警报。
(5)完成物料18提升后,运行小车主体1随牵引索20运动至物料18的装卸点的卸料区上方,重复(2)、(3),完成物料18卸料操作。
以上仅为本发明的实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在申请待批的本发明的权利要求范围之内。