一种优化换流站电气设备施工效率的时空碰撞校验方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及直流输电工程,具体涉及一种优化换流站电气设备施工效率的时空碰撞校验方法。
背景技术
本节中的陈述仅提供与本公开相关的背景信息,并且可能不构成现有技术。
直流输电工程的大规模建设,特别是±500kV柔性直流和特高压直流多端混合直流工程的成功投运,突破了能源输送瓶颈。
其中,换流站是直流输电的核心,各种电气设备数量多,结构复杂,安装及施工难度大,是一个高度动态的过程;由施工现场空间布局与时间安排的矛盾和冲突引起设备碰撞、设备无法安装等情况时有发生,甚至发生安全事故。
传统的碰撞校验方法只适用于设计初期,主要通过3D模型直接进行静态分析,仅能发现硬碰撞存在的间距和空间无法满足相关施工要求的问题,对实际发生在施工过程中的时空碰撞却无能为力。
发明内容
本发明的目的在于:针对目前传统的碰撞校验方法只适用于设计初期,主要通过3D模型直接进行静态分析,仅能发现硬碰撞存在的间距和空间无法满足相关施工要求的问题,提供了一种优化换流站电气设备施工效率的时空碰撞校验方法,可应用在施工图阶段,对电气设备软碰撞和硬碰硬进行校验,以避免施工过程中产生的安全隐患,从而解决了上述问题。
本发明的技术方案如下:
一种优化换流站电气设备施工效率的时空碰撞校验方法,包括:
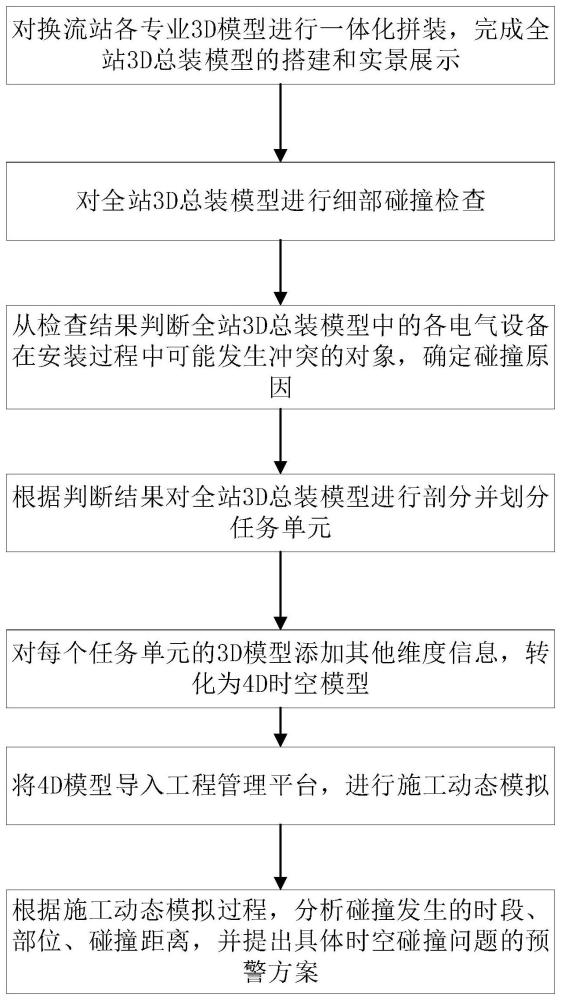
步骤S1:对换流站各专业3D模型进行一体化拼装,完成全站3D总装模型的搭建和实景展示;
步骤S2:对全站3D总装模型进行细部碰撞检查;
步骤S3:从检查结果判断全站3D总装模型中的各电气设备在安装过程中可能发生冲突的对象,确定碰撞原因;
步骤S4:根据判断结果对全站3D总装模型进行剖分并划分任务单元;
步骤S5:对每个任务单元的3D模型添加其他维度信息,转化为4D时空模型;
步骤S6:将4D模型导入工程管理平台,进行施工动态模拟;
步骤S7:根据施工动态模拟过程,分析碰撞发生的时段、部位、碰撞距离,并提出具体时空碰撞问题的预警方案。
进一步地,所述步骤S1,包括:
对换流站各专业3D模型进行轻量化和格式处理;
将处理后的换流站各专业3D模型导入Microstation软件中,进行全站3D总装模型的搭建和实景展示。
进一步地,所述步骤S1,还包括:
利用三维设计即时性的特点,通过对全站3D总装模型的浏览,检查模型可能存在的错、漏、碰、缺,以及空间布置的合理与否。
进一步地,所述步骤S2,包括:
借助LumenRT软件自动全景漫游,在三维环境中,利用软件工具输入相关数据后,在三维环境中实时地查看碰撞细节、碰撞部位、碰撞距离。
进一步地,所述步骤S3,包括:
根据获取的碰撞细节、碰撞部位、碰撞距离,判断各电气设备在安装过程中可能发生冲突的对象,并分析碰撞原因和造成的后果;
所述碰撞原因,包括:硬碰撞和软碰撞。
进一步地,所述步骤S4,包括:
将可能发生碰撞的电气设备作为一个任务单元,对每个任务单元的设计三维模型进行剖分。
进一步地,所述设计三维模型,包括:电气设备、安装场地及安装设备。
进一步地,所述步骤S5,包括:
对每个任务单元的3D模型关联时间维度、空间维度以及相关场地资源,形成全寿命周期的4D时空模型。
进一步地,所述步骤S6,包括:
采用边界描述法描述动态下的3D实体外形;
其中,对于可旋转的实体,将其可旋转的部分经过旋转后的形成的整体模型,作为其空间占位的完整描述。
进一步地,所述步骤S7,包括:
基于层次包围盒碰撞原理在工程管理平台进行施工动态模拟。
与现有的技术相比本发明的有益效果是:
一种优化换流站电气设备施工效率的时空碰撞校验方法,不仅适用于设计初期,更能应用在施工阶段,既能发现硬碰撞存在的间距和空间问题,又能对实际发生在施工过程中的软碰撞提出解决方案;换流站时空碰撞校验技术的成功运用,提高了换流站大型电气设备布置设计和施工安装的精准性,对于如何把握施工次序和施工控制点,提高空间利用率显示了积极意义,减少了施工过程中的返工和废工,提高了施工效率,缩短了施工工日,对节省施工费用有积极的意义。
附图说明
图1为一种优化换流站电气设备施工效率的时空碰撞校验方法流程图;
图2为平波电抗器时空碰撞校验结果。
具体实施方式
需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
下面结合实施例对本发明的特征和性能作进一步的详细描述。
实施例一
换流站是直流输电的核心,各种电气设备数量多,结构复杂,安装及施工难度大,是一个高度动态的过程;由施工现场空间布局与时间安排的矛盾和冲突引起设备碰撞、设备无法安装等情况时有发生,甚至发生安全事故。
传统的碰撞校验方法只适用于设计初期,主要通过3D模型直接进行静态分析,仅能发现硬碰撞存在的间距和空间无法满足相关施工要求的问题,对实际发生在施工过程中的时空碰撞却无能为力。
本实施例针对于上述问题,提出了一种优化换流站电气设备施工效率的时空碰撞校验方法,将3D模型赋予时间因素,针对某个具体项目可能发生的施工冲突问题进行动态分析,及时发现软碰撞中由于施工组织可能发生的碰撞问题,如场区中的车辆行驶、塔吊等施工机械的运作;可有效避免对施工进度和成品外观造成影响,避免发生因交叉作业带来的安全隐患和进度隐患。
请参阅图1,一种优化换流站电气设备施工效率的时空碰撞校验方法,具体包括如下步骤:
步骤S1:对换流站各专业3D模型进行一体化拼装,完成全站3D总装模型的搭建和实景展示;
步骤S2:对全站3D总装模型进行细部碰撞检查;
步骤S3:从检查结果判断全站3D总装模型中的各电气设备在安装过程中可能发生冲突的对象,确定碰撞原因;
步骤S4:根据判断结果对全站3D总装模型进行剖分并划分任务单元;
步骤S5:对每个任务单元的3D模型添加其他维度信息,转化为4D时空模型;
步骤S6:将4D模型导入工程管理平台,进行施工动态模拟;
步骤S7:根据施工动态模拟过程,分析碰撞发生的时段、部位、碰撞距离,并提出具体时空碰撞问题的预警方案。
在本实施例中,具体的,所述步骤S1,包括:
对换流站各专业3D模型进行轻量化和格式处理;
将处理后的换流站各专业3D模型导入Microstation软件中,进行全站3D总装模型的搭建和实景展示。
在本实施例中,具体的,所述步骤S1,还包括:
利用三维设计即时性的特点,通过对全站3D总装模型的浏览,检查模型可能存在的错、漏、碰、缺,以及空间布置的合理与否。
在本实施例中,具体的,所述步骤S2,包括:
借助LumenRT软件自动全景漫游,在三维环境中,利用软件工具输入相关数据后,在三维环境中实时地查看碰撞细节、碰撞部位、碰撞距离。
在本实施例中,具体的,所述步骤S3,包括:
根据获取的碰撞细节、碰撞部位、碰撞距离,判断各电气设备在安装过程中可能发生冲突的对象,并分析碰撞原因和造成的后果;
所述碰撞原因,包括:硬碰撞和软碰撞;
在本实施例中,以平波电抗器为例,通过3D模型传统碰撞分析,初步判断平波电抗器安装过程中存在的冲突对象可能有避雷器、支柱绝缘子以及钢结构构筑物等,分析碰撞原因为硬碰撞。
在本实施例中,具体的,所述步骤S4,包括:
将可能发生碰撞的电气设备作为一个任务单元,对每个任务单元的设计三维模型进行剖分;其中,所述设计三维模型,包括:电气设备、安装场地及安装设备;
以平波电抗器为例,将每组平波电抗器作为1个任务单元,取名为平波电抗单元,对每个任务单元的设计三维模型进行剖分,建模精度要求粗中有细,保证关键性尺寸精确无误;
在一个优选实施例中,以平波电抗器为例,单次任务运行计划原则:任务类型:主要为高空平台和吊车作业平波电抗器本体、屏蔽均压环、平抗避雷器;任务周期:完成一次平波电抗器吊装的时间;运行轨迹:由平波电抗器起吊位置和安装位置决定。
在本实施例中,具体的,所述步骤S5,包括:
对每个任务单元的3D模型关联时间维度、空间维度以及相关场地资源,形成全寿命周期的4D时空模型;
以平波电抗器为例,将平波电抗单元3D模型与施工进度相链接,并与施工资源及成本信息集成一体,基本信息模型可提供项目、建筑构件的浏览与管理功能,4D时空模型可支持工程项目施工过程动态模拟和施工管理。
在本实施例中,具体的,所述步骤S6,包括:
采用边界描述法描述动态下的3D实体外形,具体为三角形列表;
其中,对于可旋转的实体,不能简单以其外形表现等同于其空间占位情况,如塔吊、履带吊等垂直运输工具,其吊臂可以在高空旋转,故仅用某一时刻该实体的3D实体外形描述并不能反映其工作时的空间占有,因此,可将其可旋转的部分经过旋转后的形成的整体模型,作为其空间占位的完整描述;
以平波电抗器为例,将平波电抗器4D时空模型在工程平台中定义主要施工设备的动态空间占位三维描述参数,可将施工塔吊可旋转的部分经过旋转后的形成的整体模型,作为其空间占位的完整描述。同时根据科勃海尔LTM-1500型500t吊车设备使用说明书要求并结合实际情况,合理确定设备的竖向间距值,作为设定公差的参考值。
参数描述如下:
工作半径=10m
线圈本体吊装高度=16-18m
吊臂角度=71.6度
吊点到电抗器距离=17m
吊臂长度=31.7m
起吊点距离地面高度=3.71m
吊臂离地净高=34.26m
抗杆距离=1-1.5m
施工场地高度值=38.2m。
在本实施例中,具体的,所述步骤S7,包括:
基于层次包围盒碰撞原理在工程管理平台进行施工动态模拟;其核心思路是利用多个静态模型来代替连续动态模型实施碰撞检查;每个静态模型均代表电气设备在某一时刻的空间形态,在空间位置上按一定规律平均分布,能够从一定程度上相对完整地描述设备的运行轨迹变化,或者反映在实施检测的时段内电气设备在不同方位的工况,最终发现隐藏在多维空间的碰撞,分析碰撞发生的时段、部位、碰撞距离,提出针对具体时空碰撞问题的预警方案;
如图2所示,以平波电抗器为例,一方面要检测设备安装吊车与电气绝缘子、避雷器可能发生的碰撞,另一方面要检测安装吊车与周边建构筑物之间可能发生的碰撞。采用运输车把平抗器本体运输至吊车作业范围(R=10m)内,科勃海尔LTM-1500型500t吊车在安装平抗器运行轨迹中,与017=P1.WP-F3避雷器、025=FZSPW支柱绝缘子发生碰撞。
目前的施工设备选型、布置方式及动态运行参数完全满足本次任务单元的需求。吊车安装及运行轨迹,起吊时间及落吊时间满足施工进度计划及投运要求。
根据碰撞结果,调整施工组织如下:
在一组平抗器单元安装过程中,应优先用科勃海尔LTM-1500型500t吊车把平抗器本体起吊到安装位置,然后进行017=P1.WP-F3避雷器、025=FZSPW支柱绝缘子的安装,在进行第一、二、三、四、五、六、七屏蔽均压环等附件的安装。
以上所述实施例仅表达了本申请的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。
提供本背景技术部分是为了大体上呈现本发明的上下文,当前所署名的发明人的工作、在本背景技术部分中所描述的程度上的工作以及本部分描述在申请时尚不构成现有技术的方面,既非明示地也非暗示地被承认是本发明的现有技术。
- 一种适用于特高压直流输电换流站的无功控制和谐波的优化方法
- 一种高分辨率遥感图像分类算法时空效率优化方法
- 一种投入驱动的存储与计算一体化协同调整的面向事务处理的时空效率优化方法