一种关节式自适应爬管机器人
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及施机器人技术领域,具体为一种关节式自适应爬管机器人。
背景技术
随着现代社会的快速发展,机器人产业已经逐步渗透到了各个领域中,越来越多的人工作业由机器人作业来替代。各类高空管道或输电线路在维护和清理杂物时通常危险系数高,容易发生事故,造成生命和财产损失。目前,有关爬管机器人的移动方式主要有蠕动式、螺旋式、滚动式、交替攀爬等,但是普遍存在一些缺点,如:越障能力差,很难通过交叉管道和弯管,负载能力差,运动不稳定,适应能力差以及对管道直径的要求太高等。
现有技术中,中国专利申请CN 105729487 A公开了一种抱式矿用提升机巡检机器人,通过躯干的曲柄滑块机构来带动上下两个机械爪交替抱紧管道,虽然结构简单,但是该机器人只能攀爬直管且无法翻越法兰盘等障碍,适应能力较差;又如中国专利申请CN108583713 A公开了一种仿生立木攀爬机器人,通过若干弹簧连接组成柔性躯干来带动上下两个机械爪实现攀爬,但是其机械爪结构简单,且整个机构稳定性较差,无法适应复杂多变的管道情况。
发明内容
本发明的目的在于提供一种工作稳定性好、越障能力强、能攀爬直管、弯管并且能对管道直径的变化和其表面状况有较好适应性、能携带一定负载的关节式自适应爬管机器人。
为实现上述目的,本发明提供如下技术方案:一种关节式自适应爬管机器人,包括上部躯干、下部躯干、足部、左上肢、右上肢,所述左上肢与所述右上肢对称连接在所述上部躯干两边,所述上部躯干是一个左右对称的结构,所述上部躯干包括两个相同的T字型躯干板以及将其连接在一起的躯干底板和躯干顶板,所述上部躯干还包括两个与所述左上肢和所述右上肢相连接的旋转关节、两个相同的直流伺服电机、电机固定板、联轴器、方形座轴承以及轴承座固定板,所述躯干顶板和所述躯干底板都通过销钉连接在所述T字型躯干板上,所述旋转关节一端通过所述方形座轴承固定后插入到所述联轴器中,所述联轴器的同一端与所述直流伺服电机的输出轴相连,所述直流伺服电机与所述联轴器之间放有电机固定板,所述电机固定板的左右两侧分别通过两个销钉固定在T字型躯干板上,所述方形座轴承下方通过所述轴承座固定板固定,所述轴承座固定板左右两侧分别通过销钉固定在T字型躯干板上,所述下部躯干包括腰部旋转机构和下部连接板,所述腰部旋转机构和所述下部连接板之间通过连接臂相连,所述连接臂上端与所述腰部旋转机构通过两个销轴连接在一起,所述连接臂下端通过螺钉与所述下部连接板固定连接在一起,所述下部连接板中间部分开有矩形槽,且所述矩形槽内固定有所述足部。
优选的,所述腰部旋转机构包括谐波减速器,第一皮带轮、皮带、第二皮带轮、支架、第一摆杆、第二摆杆、第一法兰轴承、法兰螺钉、斜支架、腰部伺服电机以及伺服电机固定板,所述支架上端与所述上部躯干的所述躯干底板通过螺钉固定连接,所述腰部伺服电机通过所述伺服电机固定板固定在所述斜支架上,腰部伺服电机输出轴一端与所述第二皮带轮相连接,所述第一皮带轮与所述第二皮带轮通过所述皮带构成一个带传动的装置,所述第一皮带轮的一端与所述谐波减速器的输出轴相连,所述谐波减速器通过六个螺钉固定在所述支架左端,所述谐波减速器远离所述第一皮带轮的一端与所述第一摆杆连接,所述第一法兰轴承通过所述法兰螺钉连接在所述支架的右侧,且所述第一法兰轴承与所述谐波减速器同轴心,所述第一法兰轴承的另一端与所述第二摆杆连接,所述第一摆杆和所述第二摆杆分别通过两个法兰销轴与所述斜支架连接。
优选的,所述左上肢包括大手臂、第一盖板、第一轴、第二轴、第三轴、第一齿轮、第二齿轮、第三齿轮、第四齿轮、左臂伺服电机、七连杆机构、第一连接框、机械手爪,所述大手臂一端与所述上部躯干的左边通过旋转关节转动连接,所述大手臂的另一端通过螺钉固定在所述第一盖板的后部,所述第一轴和所述第二轴分别对称设置在所述第一盖板的两端,且所述第一轴和所述第二轴与所述第一盖板的开槽通过转动副连接;所述第三轴与所述第一盖板另一侧的开槽通过转动副连接,所述第一齿轮、所述第二齿轮和所述第三齿轮分别通过紧定螺钉连接在所述第一轴、所述第二轴和所述第三轴上,所述第二齿轮和所述第三齿轮相啮合,所述第三轴同侧的所述第一盖板上固定安装所述左臂伺服电机,所述左臂伺服电机的输出轴通过紧定螺钉与所述第四齿轮连接,所述第四齿轮分别与所述第三齿轮和第一齿轮相啮合,所述第一连接框的两端分别固定连接在所述第一轴和所述第二轴上,所述第一轴和所述第二轴分别与所述七连杆机构相连,所述右上肢结构组成与所述左上肢的结构组成完全相同。
优选的,所述七连杆机构包括第一连杆、第二连杆、第三连杆、第四连杆、第五连杆、第六连杆、第七连杆、第二连接框,所述第一轴和所述第二轴分别装入到所述第一连杆一端和所述第二连杆一端的轴孔中,所述第一连杆另一端与所述第五连杆的一端通过销轴铰接,所述第一连杆三分之一处与所述第三连杆一端通过销轴铰接,所述第三连杆另一端和所述第四连杆一端通过销轴铰接,所述第四连杆和所述第五连杆分别在其三分之一处通过销轴铰接,所述第五连杆另一端和所述第六连杆一端通过销轴铰接,所述第四连杆另一端和所述第七连杆一端通过销轴铰接,所述第六连杆另一端与所述第七连杆三分之一处通过销轴铰接,所述第七连杆两端分别固定连接在所述第二连接框上。
优选的,所述第一连杆、所述第二连杆、所述第四连杆、所述第五连杆和所述第七连杆长度相同,所述第三连杆和所述第六连杆的长度为所述第一连杆的八分之三。
优选的,所述机械手爪包括手爪板、第二法兰轴承、第一传动齿轮、第二传动齿轮、传动轴、舵机、传动螺杆、传动螺母、螺母丝杆、固定滑轨、第一齿条、第二齿条、齿条连接板、第一直齿轮、第二直齿轮、第三直齿轮、第四直齿轮、手掌以及变胞机构,所述第二法兰轴承与所述七连杆机构的第二连接框通过螺钉固定连接,所述第二法兰轴承的轴端与所述第一传动齿轮连接,所述第一传动齿轮与所述传动轴转动连接,所述传动轴另一端穿过所述手爪板与所述传动螺杆转动连接,所述舵机固定在所述手爪板的右侧,所述舵机输出轴与所述第二传动齿轮转动相连,所述第二传动齿轮再和所述第一传动齿轮相啮合,所述传动螺杆另一端与所述传动螺母相连,所述传动螺母下部开孔,且所述螺母丝杆穿过所述传动螺母下部开的孔,所述螺母丝杆固定在所述固定滑轨上,所述手掌中间开一个凹槽,且凹槽与所述固定滑轨之间通过螺钉固定在所述手掌上,所述传动螺母与两个齿条连接板固定连接,所述两个齿条连接板分别与第一齿条和第二齿条固定连接,所述第一齿条和第二齿条分别与第一直齿轮和第二直齿轮相啮合。
优选的,所述变胞机构包括左手指和右手指,所述左手指包括第一支杆,第二支杆、第三支杆、第四支杆、第一连接杆、第二连接杆、第一手指、第二手指、第三手指、第四手指、气动弹簧,所述第一支杆一端与所述第一直齿轮通过销轴铰接,所述第二支杆一端与第三直齿轮通过销轴铰接,所述第一支杆另一端、所述第三支杆一端和所述第一连接杆一端通过销轴铰接,所述第三支杆另一端、第二连接杆一端与所述第四支杆一端通过销轴铰接,所述第四支杆另一端与所述第四手指一端通过销轴铰接,所述第二支杆一端与所述第三直齿轮通过销轴铰接,所述第二支杆另一端与所述第一手指一端通过销轴铰接,所述第一手指另一端、所述第二手指一端以及所述第一连接杆另一端通过销轴铰接,所述第二手指另一端、所述第三手指一端以及所述第二连接杆另一端通过销轴铰接,所述第三手指另一端与所述第四手指另一端通过销轴铰接,所述第一连接杆的底部和所述第一手指的左部、所述第二连接杆的底部和所述第二手指的左部、所述第三手指的左部和所述第四手指的底部均通过所述气动弹簧相连接,所述左手指与所述右手指是呈对称分布且完全相同的结构。
优选的,所述足部包括电动推杆、推杆底板、尾部固定板、伸缩固定块、第一伸缩杆、第二伸缩杆、第一腿部、第二腿部、第一弹性板、第二弹性板,所述电动推杆通过四个螺钉固定在所述推杆底板上,所述推杆底板通过四个螺钉固定在所述尾部固定板尾部,所述尾部固定板两侧的中心通过四个销钉固定在所述下部躯干的矩形槽内,所述电动推杆伸出一端穿过所述尾部固定板的孔和所述伸缩固定块的孔,且通过紧定螺钉固定连接,所述第一伸缩杆和所述第二伸缩杆的一端分别与所述尾部固定板伸出的部分通过销轴铰接,所述第一腿部和第二腿部的一端分别与所述第一伸缩杆和所述第二伸缩杆的另一端通过销轴铰接,所述第一腿部和所述第二腿部的中间与所述伸缩固定块通过销轴铰接,且所述第一腿部和所述第二腿部对称,所述第一腿部和所述第二腿部的尾部分别通过螺钉与所述第一弹性板和所述第二弹性板固定连接,所述第一腿部和所述第二腿部与所述第一弹性板和所述第二弹性板中心线平行且整个结构呈对称分布。
与现有技术相比,本发明的有益效果是:
1、本发明由上部躯干、下部躯干、足部、左上肢、右上肢组成,上部躯干和下部躯干结构简单,它们之间通过腰部机构连接,且采用谐波减速器+伺服电机驱动二者相互转动以调节二者之间的夹角,从而实现机器人在攀爬时躯干之间的灵活调整,便于机器人的越障和转弯等动作的实现。
2、本发明的左上肢和右上肢关于躯干左右对称,且上下交替,两个上肢通过上部躯干的电机驱动,类似于人爬树时手臂的动作,从而实现左上肢和右上肢的交替攀爬;上肢部分底部通过一个伺服电机带动四个齿轮啮合传动,从而实现与齿轮相连的两个轴沿相反方向的转动,轴再与一个七连杆机构相连接,可以让手臂灵活地实现90°圆弧的伸缩运动;手爪部分通过一个三层变胞机构实现手爪的夹紧和张开,使得手爪既具有一定的刚性,又具有对管道表面状况的适应性,从而可以灵活地适应不同状况的管道夹紧,同时,通过一个螺杆螺母传动机构,增强了手爪的自锁性,使其抓取管道的时候更稳定。
3、本发明的足部也是一个左右对称的结构,其结构简单,仅需通过一个电动推杆的推动从而实现足部的同时张开和闭合,类似于人爬树时两腿的抱紧;同时,足部末端还加了两个由橡胶制成的弹性板,增大了足部与管道间的摩擦力,从而抓得更紧。
附图说明
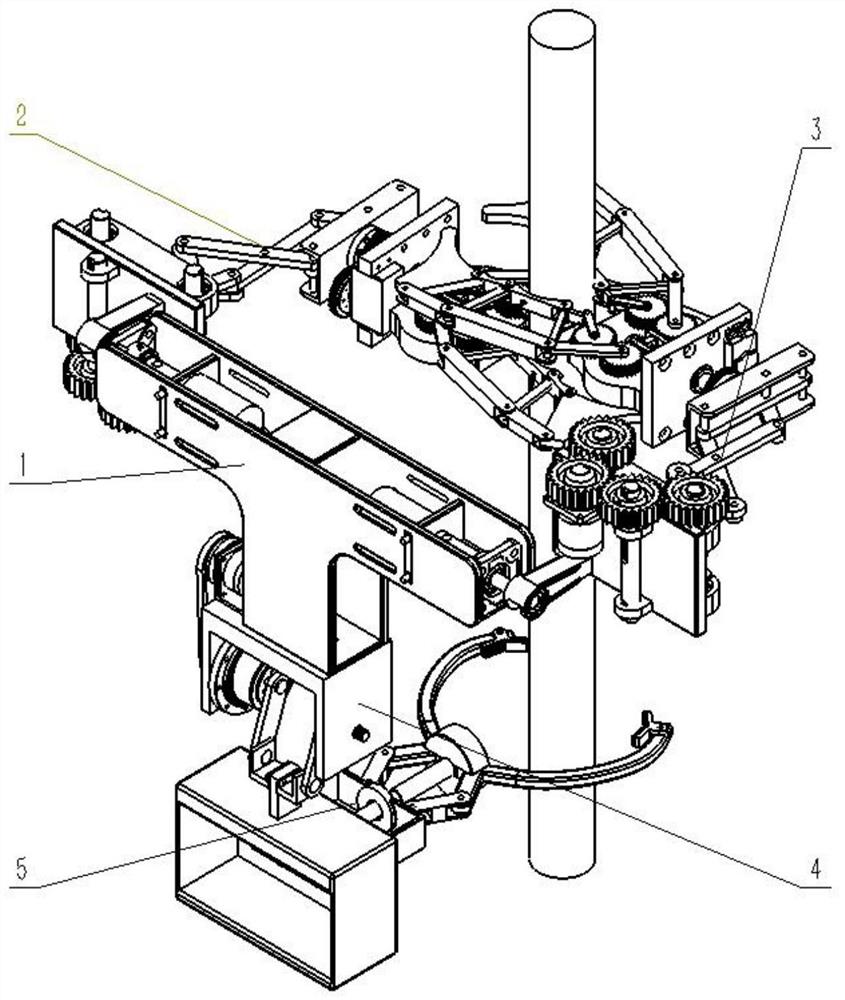
图1是本发明总体结构示意图。
图2是本发明上部躯干结构示意图。
图3是本发明下部躯干结构示意图。
图4是本发明左上肢的上下二等角轴测示意图。
图5是本发明左上肢的下视图示意图。
图6是左上肢的大手臂结构示意图
图7是本发明变胞手爪的结构示意图。
图8是本发明足部结构示意图。
图9是本发明实施例所述机器人攀爬立管和横管过渡时的动作示意图。
图10是本发明实施例所述机器人攀爬时越过法兰盘的动作示意图。
图中:1、上部躯干,2、左上肢,3、右上肢,4、下部躯干,5、足部,101、躯干顶板,102、直流伺服电机,103、电机固定板,104、旋转关节,105、方形座轴承,106、轴承座固定板,107、联轴器,108、躯干底板,109、固定销钉,110、T字型躯干板,401、支架,402、第一皮带轮,403、皮带,404、第二皮带轮,405、伺服电机固定板,406、腰部伺服电机,407、谐波减速器,408、第一法兰轴承,409、法兰螺钉,410、第二摆杆,411、下部连接板,412、斜支架,413、连接臂,414、第一摆杆,201、舵机,202、第二传动齿轮,203、第二连接框,204、第三连杆,205、第一盖板,206、第三轴,207、第二轴,208、第一连接框,209、第二连杆,210、第一连杆,211、第五连杆,212、第一轴,213、第四连杆,214、第六连杆,215、第七连杆,216、第一传动齿轮,217、手爪板,218、变胞机构,219、传动轴,220、第二法兰轴承,221、第二齿轮,222、第三齿轮,223、第四齿轮、224、左臂伺服电机、225、第一齿轮,226、大手臂,501、尾部固定板,502、推杆底板,503、固定螺钉,504、电动推杆,505、伸缩固定块,506、第一伸缩杆,507、第一腿部,508、第一弹性板,509、第二弹性板,510、第二腿部,511、第二伸缩杆,2167、传动螺杆,2165、传动螺母,2169、螺母丝杆,2168、固定滑轨,2170、第一直齿轮,2163、第二直齿轮,2173、第三直齿轮,2161、第四直齿轮,2166、手掌,2172、第一支杆,2171、第二支杆,2177、第三支杆,2179、第四支杆,2175、第一连接杆,2178、第二连接杆,2174、第一手指,2182、第二手指,2181、第三手指,2180、第四手指,2176、气动弹簧。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
如图1所示,在本实施例中,一种关节式自适应爬管机器人,爬管机器人包括上部躯干1、左上肢2、右上肢3、下部躯干4、足部5,左上肢2与右上肢3对称连接在上部躯干1两边,且分别与上部躯干1的左右两端连接,上部躯干1的底部与下部躯干4的顶部固定连接在一起,足部5固定在下部躯干4底部的正中间位置。
如图2所示,所述上部躯干1是一个左右对称的结构,包括两个相同的T字型躯干板110以及将其连接在一起的躯干顶板101和躯干底板108;还包括两个与左上肢2和右上肢3相连接的旋转关节104、两个相同的直流伺服电机102、电机固定板103、联轴器107、方形座轴承105以及轴承座固定板106。躯干顶板101和躯干底板108都通过销钉将两个T字型躯干板110连接在一起,旋转关节104一端通过方形座轴承105固定后插入到联轴器107中,联轴器107的同一端与直流伺服电机102的输出轴相连,从而通过直流伺服电机102的转动来带动左上肢2的上下摆动,直流伺服电机102与联轴器107之间放有电机固定板103,从而达到固定电机的目的;电机固定板103的左右两侧分别通过两个销钉固定在T字型躯干板110上;方形座轴承105下方通过轴承座固定板106固定,轴承座固定板106左右两侧分别通过销钉固定在T字型躯干板110上。
如图3所示,下部躯干4包括腰部旋转机构和下部连接板411,他们之间通过连接臂413相连,连接臂413上端与腰部旋转机构通过两个销轴连接在一起,可以实现摆动;连接臂413下端通过螺钉与下部连接板411固定连接在一起,下部连接板411中间部分开了一个矩形槽,与足部5固定在一起;腰部旋转机构包括谐波减速器407,第一皮带轮402、第二皮带轮404、皮带403、支架401、第一摆杆414、第二摆杆410、第一法兰轴承408、法兰螺钉409、斜支架412、腰部伺服电机406以及伺服电机固定板405,支架401上端与上部躯干1的躯干底板108通过两个螺钉固定连接,腰部伺服电机406通过电机固定座405固定在斜支架412上,腰部伺服电机406输出轴一端与第二皮带轮404相连接,第二皮带轮404与第一皮带轮402通过皮带403构成一个带传动的装置,第一皮带轮402的一端与谐波减速器407的输出轴相连,谐波减速器407通过六个螺钉固定在支架401左端,另一端与第一摆杆414连接,通过腰部伺服电机406的转动带动第二皮带轮404转动从而实现带传动,最终带动谐波减速器407转动,在支架401右端,第一法兰轴承408通过法兰螺钉409连接在支架401上,且第一法兰轴承408与谐波减速器407同轴心,第一法兰轴承408的另一端与第二摆杆410连接,第一摆杆414和第二摆杆410分别通过两个法兰销轴与斜支架412连接,从而带动斜支架412摆动。
如图4、图5和图6所示,所述左上肢2包括大手臂226、第一盖板205、第一轴212、第二轴207、第三轴206、第一齿轮225、第二齿轮221、第三齿轮222、第四齿轮223、左臂伺服电机224、七连杆机构、第一连接框208、机械手爪。大手臂226一端与上部躯干1的旋转关节104转动连接,其另一端通过螺钉固定在第一盖板205的后部;第一轴212和第二轴207分别对称设置在第一盖板205两端,并与其开槽相连接;第三轴206则与第一盖板205另一侧的开槽连接;第一齿轮225、第二齿轮221、第三齿轮222分别通过紧定螺钉连接在三根轴上,使得轴可以带动它们自由转动,同时第三轴206的位置要保证第二齿轮221和第三齿轮222相啮合;在与第三轴206同侧的第一盖板205上固定住左臂伺服电机224,左臂伺服电机224的输出轴通过紧定螺钉与第四齿轮223连接,通过调整左臂伺服电机224的位置来保证第四齿轮223恰好与第三齿轮222和第一齿轮225相啮合,同时,四个齿轮是完全相同的;第一连接框208的两端分别固定连接在第一轴212和第二轴207上,然后第一轴212和第二轴207与七连杆机构相连,同理,右上肢3的结构组成与左上肢2完全相同。
七连杆机构包括第一连杆210、第二连杆209、第三连杆204、第四连杆213、第五连杆211、第六连杆214、第七连杆215、第二连接框203,第一轴212和第二轴207分别装入第一连杆210一端的轴孔和第二连杆209一端的轴孔,第一连杆210另一端与第五连杆209一端通过销轴铰接,第一连杆210三分之一处与第三连杆204一端通过销轴铰接,第三连杆204另一端和第四连杆213一端通过销轴铰接,第四连杆213和第五连杆211分别在其三分之一处通过销轴铰接,第五连杆211另一端和第六连杆214一端通过销轴铰接,第四连杆213另一端和第七连杆215一端通过销轴铰接,第六连杆214另一端与第七连杆215三分之一处通过销轴铰接,第七连杆215两端分别固定连接在第二连接框203上。
其中,第一连杆210、第二连杆209、第四连杆213、第五连杆211、第七连杆215长度相同、第三连杆204、第六连杆214长度为第一连杆210的八分之三。
如图5和图7所示,机械手爪包括手爪板217、第二法兰轴承220、第一传动齿轮216、第二传动齿轮202、传动轴219、舵机201、齿条连接板2162、齿条2164、传动螺母2165、手掌2166、传动螺杆2167、固定滑轨2168、螺母丝杆2169、第一直齿轮2170、第二直齿轮2163、第三直齿轮2173、第四直齿轮2161以及变胞机构,第二法兰轴承220与七连杆机构的第二连接框203通过螺钉固定连接;第二法兰轴承220的轴端与第一传动齿轮216连接;第一传动齿轮216与传动轴219转动连接,传动轴219的另一端穿过手爪板217与传动螺杆2167相连;舵机201固定在手爪板217的右侧,舵机201的输出轴与第二传动齿轮202转动连接,第二传动齿轮202再和第一传动齿轮216相啮合;传动螺杆2167另一端与传动螺母2165相连,传动螺母2165的下部开孔,螺母丝杆2169穿过该孔,螺母丝杆2169固定在固定滑轨2168上,手掌2166中间开了一个凹槽,凹槽与固定滑轨2168之间通过螺钉固定在手掌上;传动螺母2165与两个齿条连接板2162固定连接,两个齿条连接板2162再分别两个齿条2164固定连接,两个齿条2164再分别与第一直齿轮2170和第二直齿轮2163相啮合。
变胞机构包括左手指和右手指,左手指和右手指是呈对称分布的完全相同的结构,以左手指为例,包括第一支杆2172,第二支杆2171、第三支杆2177、第四支杆2179、第一连接杆2175、第二连接杆2178、第一手指2174、第二手指2182、第三手指2181、第四手指2180、气动弹簧2176,第一支杆2172一端与第一直齿轮通过销轴铰接,第二支杆2171一端与第三直齿轮2173通过销轴铰接,第一支杆2172另一端、第三支杆2177一端和第一连接杆2175一端通过销轴铰接,第三支杆2177另一端、第二连接杆218一端和第四支杆2179一端通过销轴铰接,第四支杆2179另一端与第四手指2180一端通过销轴铰接,第二支杆2171另一端与第一手指2182一端通过销轴铰接,第一手指2174另一端、第二手指2182一端以及第一连接杆2175另一端通过销轴铰接,第二手指2182另一端、第三手指2181一端以及第二连接杆2178另一端通过销轴铰接,第三手指2181另一端与第四手指2180另一端通过销轴铰接;同时,第一连接杆2175底部和第一手指2174左部、第二连接杆2178底部和第二手指2182左部、第三手指2181左部和第四手指2180底部均通过气动弹簧2176相连接。
如图8所示,足部5包括电动推杆504、推杆底板502、固定螺钉503、尾部固定板501、伸缩固定块505、第一伸缩杆506、第二伸缩杆511、第一腿部507、第二腿部510、第一弹性板508、第二弹性板509。电动推杆504通过四个螺钉固定在推杆底板502上,推杆底板502通过固定螺钉503固定在尾部固定板501的尾部,尾部固定板501两边的中心通过四个销钉固定在下部躯干4的矩形槽内,电动推杆504伸出的一端穿过尾部固定板501的孔,与伸缩固定块505的孔通过紧定螺钉固定连接在一起,第一伸缩杆506和第二伸缩杆511的一端分别通过销轴与尾部固定板501伸出的部分转动连接,第一腿部507和第二腿部510的一端分别与第一伸缩杆506和第二伸缩杆511的另一端通过销轴转动连接,第一腿部507和第二腿部511的中间通过销轴与伸缩固定块505转动连接,使得两个腿部保证对称,第一腿部507和第二腿部510的尾部分别通过螺钉与第一弹性板508和第二弹性板509固定连接,保证腿部的尾部与弹性板的中心线平行,弹性板由橡胶材料制作,可以增大与管道间的摩擦力。整个结构呈对称分布,通过电动推杆504的伸缩运动,从而带动整个足部同时张开和闭合。
本具体实施方式如下:
本具体实施方式中,左上肢2由直流伺服电机102、左臂伺服电机224、舵机201这三个电机分别实现肩部上下摆动、上肢中部关节从水平面到竖直面的翻转以及手爪的夹紧和张开。首先通过左边的直流伺服电机102带动旋转关节104转动,旋转关节104再带动大手臂实现竖直方向的摆动;如图5所示,接着由左臂伺服电机224带动第四齿轮223逆时针方向转动,第四齿轮223再与第三齿轮222和第一齿轮225啮合,第三齿轮222再与第二齿轮221啮合,从而实现第一齿轮225和第二齿轮222实现相反方向的转动,然后两个齿轮再分别带动第一轴212和第二轴207转动,两个轴再带动七连杆机构实现第二连接框203从水平面到竖直面的翻转运动。
本具体实施方式中,舵机201带动第二传动齿轮202转动,第二传动齿轮212与第一传动齿轮216啮合,从而带动传动轴219转动,传动轴219再带动传动螺杆2167转动,传动螺杆2167的转动使得传动螺母2165沿着螺母丝杆2169在固定滑轨2168上滑动,传动螺母2165通过齿条2164带动第一直齿同时沿相反方向转动;第一支杆2172、第二支杆2171、第三直齿轮2173、第一手指2174、第一连接杆2175组成一层五杆机构,第三支杆2177、第一连接杆2175、第二手指2182、第二连接杆2178组成第一层四杆机构,第二连接杆2178、第四支杆2179、第三手指2181、第四手指2180组成第二层四杆机构,三层机构的动力源分别为第一支杆2172、第三支杆2177和第四支杆2179;当第一支杆2172与第三直齿轮处的相对转动分离力矩大于关节C处的弹簧的闭合力矩时,最下层五杆机构会产生相对转动,此时第一支杆2172相对关节B发生相对转动,带动第三支杆2177相对关节B产生扭矩,同第一支杆2172一样,当相对转动分离力矩大于关节F处弹簧的闭合力矩时,中层四杆机构会产生相对转动。同理,此时第三支杆2177相对关节E发生相对转动,带动第四支杆2179相对关节E产生扭矩,当相对转动分离力矩大于关节H处弹簧的闭合力矩时,最上层四杆机构会产生相对转动。从而使得手爪可以在不同状况下的管道上实现灵活夹紧,具有良好的适应性。
本具体实施方式中,各个手指的外部都制作成弧形面,便于更好的适应管道。
本具体实施方式中,第一层使用五杆机构,增加了一个自由度,进一步提高了手爪的灵活性。
本具体实施方式中,腰部旋转机构可以实现机器人腰部前后180度的运动。
实施例2
通过左上肢2和右上肢3交替夹紧管道,带动上部躯干1向上移动,同时在腰部旋转机构的作用下,带动下部躯干4和足部5向上移动,从而实现机器人在直管上的爬行。
实施例3
如图9所示,直管向横管爬行;图9a为机器人在直管上的初始状态,当左上肢2的直流伺服电机102转动,使得大手臂226转动90度后刚好抓紧横管,即如图9b所示;然后同理,右上肢大手臂226转动90度后刚好抓紧横管,即如图9b所示;然后左上肢2和右上肢3交替在横管上爬行,同时,在腰部伺服电机406的转动下,使得上部躯干1与下部躯干4成一个90度的夹角,从而带动足部5向上爬行,即如图9d所示;接着,左上肢2与右上肢3通过左臂或右臂伺服电机224的作用下,使得两个上肢转动到如图9e所示状态,同时,整个躯干部分也跟着转动;最后,在腰部伺服电机406以及左臂或右臂伺服电机224的反向转动的作用下,完成了直管到弯管的过渡爬行,即如图9f所示。
实施例4
如图10所示,机器人在跨越法兰盘时的动作。图10a为机器人的初始状态,当左上肢2的直流伺服电机102转动,使得大手臂226转动90度后与管道平行,即如图10b所示;然后右上肢3继续在管道上攀爬,同时,左上肢2在左臂伺服电机224的驱动下,使得其一部分与管道成45度角,同时,腰部伺服电机406驱动使得上部躯干1与下部躯干4成90度夹角,即如图10c所示;接着,整个机器人继续向前爬行,腰部伺服电机406转动到使上部躯干1与管道成45度角,同时,在左上肢2三个电机的驱动下使得左上肢3刚好越过了法兰盘与管道夹紧,即如图10d所示;同理,右上肢3在其三个电机的作用下,使得右上肢3刚好也越过了法兰盘与管道夹紧,即如图10e和10f所示;然后左上肢2左上肢3交替攀爬前行,在腰部伺服电机406的作用下,使得下部躯干4与管道成135夹角,即如图10g所示;最后,在腰部伺服电机406转动、同时左上肢2左上肢3交替攀爬前行的作用下,使得足部5越过了法兰盘与管道夹紧,完成了机器人的整个越障动作,即如图10h所示。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。